手机MEMS车载导航算法改进技术*
2017-06-09赵宣懿许建新刘建业
赵宣懿, 许建新, 熊 智, 刘建业
(南京航空航天大学 导航研究中心,江苏 南京 210016)
手机MEMS车载导航算法改进技术*
赵宣懿, 许建新, 熊 智, 刘建业
(南京航空航天大学 导航研究中心,江苏 南京 210016)
为了进一步提高手机平台航位递推/全球定位系统(DR/GPS)车载组合导航算法的适应性和导航性能,研究了手机平台车载导航算法的改进技术,就手机安装模式辨识算法进行了分析与设计,研究了汽车零速修正算法,设计了相关验证实验。实验结果表明:基于手机平台车载导航算法的改进技术,可以有效提高DR/GPS车载组合导航算法的适应性和导航性能。
手机平台; 车载导航; 安装模式辨识; 零速修正
0 引 言
目前,大部分智能手机平台上都内嵌了微机电系统(MEMS)惯性传感器[1,2]和全球定位系统(GPS)接收机模块,所以基于手机平台研究车载组合导航关键技术,对实现车载模式下的实时准确导航定位、解决GPS信号受到环境制约的问题具有重要意义。与市场上销售的采用单一GPS导航的车载导航仪相比,基于手机平台的车载导航系统具有成本低、便携性好、可连续实时准确定位等优点,具有良好的经济价值和市场价值。
当用户处于车载导航环境时,需要固定安装智能手机,采用航位推算(dead reckoning,DR)/GPS车载组合导航算法;当用户处于手持行走环境时,由于不满足航位推算DR条件,必须退出DR/GPS组合导航算法,采用行人导航算法。因此,在手机平台DR/GPS车载组合导航算法中,手机安装模式辨识技术是非常重要的。利用MEMS原始输出信息可以有效辨识手机固定及手持行走模式,从而可以实现导航算法在DR/GPS车载组合算法和行人导航算法之间进行智能切换,改进DR/GPS组合导航的适应性。同时,利用MEMS原始输出信息也可以有效辨识汽车零速状态,进行零速修正可以有效抑制无GPS环境下,由于MEMS惯性器件的漂移导致的速度和位置误差发散,有效提升DR算法的性能。
本文研究了手机平台车载导航算法的改进技术,实验结果表明,基于手机平台车载导航算法的改进技术,可以有效提高DR/GPS车载组合导航算法的适应性和导航性能。
1 手机平台DR/GPS组合导航算法
在车载导航中,由于汽车在绝大多数情况下进行的是二维水平运动,因此,可以使用竖直方向的一个陀螺仪和水平方向两个加速度计进行二维DR,只要提供汽车的初始速度、位置和航向信息,便可以实时递推出汽车的速度、位置和航向[3]。由于手机平台的MEMS惯性传感器属于消费级芯片,所以单独的DR系统会在一定时间内误差发散,为了保证系统具有较高的精度,需要将单独的DR系统与其他系统进行组合应用。本文采用手机平台内嵌的MEMS惯性传感器和GPS接收机模块,构成DR/GPS组合导航系统[4,5]。
1.1 系统状态方程
DR/GPS组合导航系统的状态方程形式如下
(1)
式中A(t)为系统状态转移矩阵;G(t)为系统噪声矩阵;W(t)为系统噪声;X(t)为8维状态矢量,定义为
X=[δPeδVxδaxδPnδVyδayδθδω]
(2)
式中δPe,δPn为东向和北向位置误差;δVx,δVy为X轴方向和Y轴方向的速度误差(X轴和Y轴是指其在载体坐标下);δax,δay为X轴和Y轴的加速度误差(X轴和Y轴是指其在载体坐标下);δθ,δω为航向角和陀螺角速率误差。
1.2 系统量测方程
DR/GPS组合导航系统采用位置、速度、航向松组合的方式,取DR系统和GPS系统输出的位置、速度和航向之间的差值作为观测方程中观测量。DR/GPS组合导航系统的量测方程形式如下
Z(t)5×1=H(t)5×8X(t)8×1+V(t)5×1
(3)
式中 Z(t)为DR系统和GPS输出的位置、速度和航向之间的差值;H(t)为量测矩阵;V(t)为量测噪声矩阵。
2 手机平台DR/GPS组合导航算法改进研究
在手机平台车载组合导航算法中,手机安装模式辨识技术是非常重要的,利用MEMS原始输出信息可以有效辨识手机固定及手持行走模式,从而可以实现导航算法在DR/GPS车载组合算法和行人导航算法之间进行智能切换,提高DR/GPS组合导航的适应性。同时,利用MEMS原始输出信息也可以有效辨识汽车零速状态,当汽车处于零速状态时,进行零速修正可以有效抑制无GPS环境下,由于MEMS惯性器件的漂移导致的速度和位置误差发散,有效提高DR算法的性能[6]。
2.1 手机安装模式辨识算法
2.1.1 水平方向陀螺每秒角度增量算法原理分析
图1是本文采用的竖向垂直车载固定安装方式下,对应的手机内部MEMS安装示意图。其中,X轴指向手机的侧面方向,Y轴指向天向方向,Z轴指向汽车前进方向的反方向。

图1 竖向垂直安装下手机内部MEMS的安装示意
当手机处于车载固定安装,进行DR/GPS车载导航时,由于Y轴陀螺敏感航向角,同时,由于汽车在绝大多数情况下进行的是二维水平运动,所以,水平方向的陀螺(X轴和Z轴)每秒的角度增量较小且稳定;当手机处于手持移动等非固定安装时,水平方向的陀螺(X轴和Z轴)每秒的角度增量很大且不稳定。通过实时检测水平方向陀螺(即X轴和Z轴)每秒的角度增量并设置合适的辨识阈值,就可以实现辨识手机固定和手持模式。陀螺每秒角度增量计算公式为
(4)
式中 Δθk为第k秒时刻陀螺的角度增量,(°);N为惯性传感器数据输出频率,Hz;ω为陀螺原始输出,rad/s。
2.1.2 手机安装模式辨识算法方案设计
根据手机在固定及手持模式下的水平陀螺每秒角度增量的规律,设置合适的辨识阈值,如果水平陀螺每秒角度增量在阈值内,则判定当前时刻处于车载固定安装模式,标志位设置为1;如果处于阈值以外,则判定当前时刻处于手持模式,标志位设置为0。同时为了提高算法每秒辨识的准确性和防止导航算法在不同模式下的频繁切换,需要设置辨识窗口T,即,若连续出现T个标志位1,则判定为处于车载固定安装模式;若连续出现T个标志位0,则判定为处于手持模式;否则,维持上一时刻的判定标志不变。手机固定及手持模式辨识算法流程图如图2。
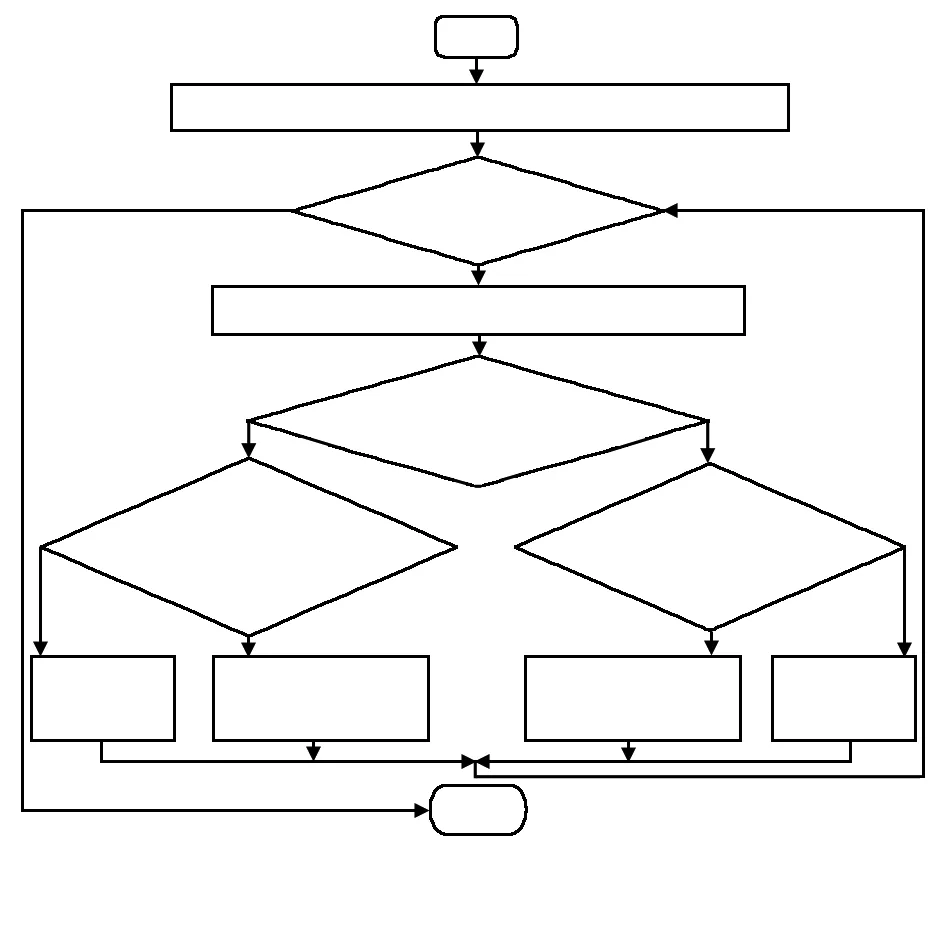
图2 手机安装模式辨识算法流程
2.2 零速修正算法研究
当用户处于车载导航环境时,利用手机MEMS传感器原始信息可以有效辨识出汽车零速状态。当汽车处于零速状态时,进行零速修正可以有效抑制无GPS环境下,由于MEMS惯性器件的漂移导致的速度和位置误差发散,有效提高DR算法的性能。
2.2.1 零速状态辨识原理
当汽车处于运动状态时,由于发动机震动和路面状况等因素,天向轴加速度计信号输出的平稳性会远远小于汽车处于静止状态。因此,可以通过检测天向加速度计在1 s时间内的最大值与最小值输出之差来辨识零速状态,加速度计输出频率是50 Hz。若最大值与最小值之差处于阈值内,则判定为零速状态;否则,处于运动状态。定义变量如下
(5)
式中A为1 s时间内,天向加速度计最大值与最小值之差,加速度计输出频率为50 Hz。
2.2.2 零速修正算法方案设计
当判定汽车处于零速状态,在对汽车速度置零的同时,对陀螺和加速度计重新进行零偏标定,从而进一步提升DR/GPS算法的性能。零速修正方案设计如图3。

图3 零速修正方案设计
3 实验验证
3.1 手机安装模式辨识算法验证
3.1.1 实验介绍
使用实验室的手机和小车,在GPS信号开阔的操场进行车载固定安装和手持模式切换试验。当辨识为车载固定安装时,进入DR/GPS组合导航算法;当辨识为手持模式时,采用行人导航算法(由于行人导航算法不属于本文研究范围,这里采用GPS信号代替)。比较加入安装模式辨识算法前后,手机平台DR/GPS组合导航算法的效果。
实验过程:将起始时刻设置为0时刻,先将手机车载固定安装一段时间,然后手持手机步行一段时间,如此反复。手机经历了固定—手持—固定—手持—固定的变化过程,记录安装模式切换时刻点如下:第66s由固定切换为手持,第138s由手持切换为固定,第202s由固定切换为手持,第276s由手持切换为固定。
3.1.2 实验结果分析与验证
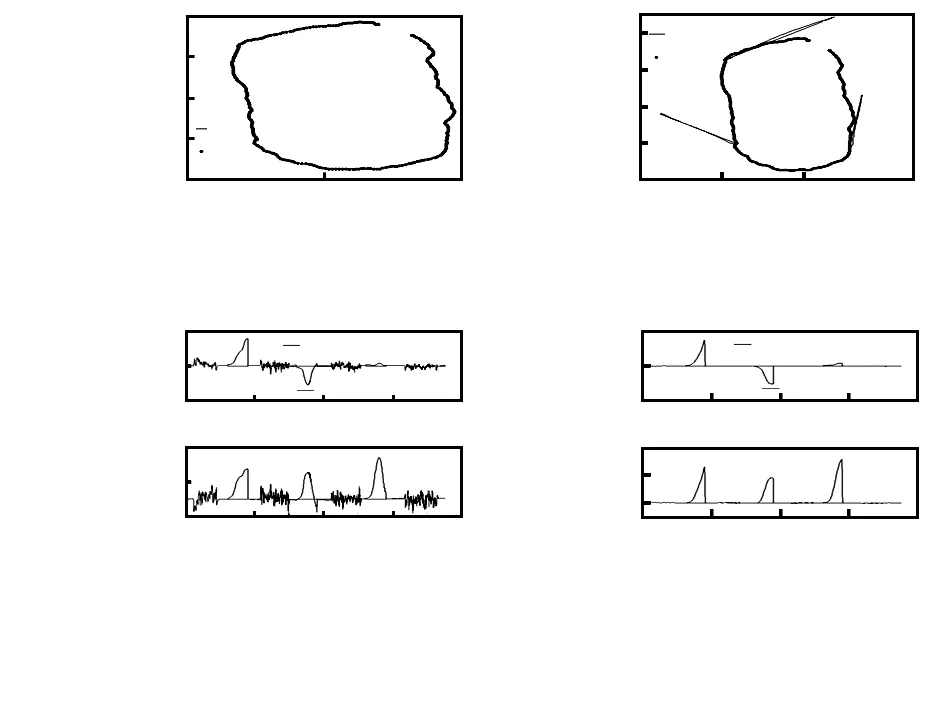
图4为安装模式辨识结果。图5为加入安装模式辨识算法前后,手机平台DR/GPS组合导航算法的效果对比。

图4 模式切换实验判定结果

图5 加入辨识算法前后导航效果对比
由图4可以看出,第68s由固定安装切换为手持,第140s由手持切换为固定安装,第206s由固定安装切换为手持,第276s由手持切换为固定安装,与实验记录的安装模式切换点时刻相比,分别延迟了2,2,4,0s。延迟时间产生的原因是由于实验过程中时间记录存在误差和设置辨识窗口共同导致的。总体来看,安装模式辨识算法可以有效辨识固定安装和手持模式。
由图5可以看出,加入手机安装模式辨识算法可以实现导航算法在DR/GPS算法和行人导航算法(GPS)之间进行智能切换,改进了DR/GPS组合导航的适应性,提高了DR/GPS整体导航性能。
3.2 零速修正算法验证
3.2.1 实验方法
使用实验室的手机和小车,在GPS信号开阔的操场进行小车运动和静止切换实验。初始时刻为0,在120s 3.2.2 实验结果分析与验证 图6为零速状态辨识结果。图7为加入零速修正算法前后,DR算法的效果对比。由图6和图7可以看出,可以利用MEMS原始输出信息有效辨识汽车零速状态,当汽车处于零速状态时,进行零速修正可以有效抑制无GPS环境 图6 零速状态辨识结果 下,由于MEMS惯性器件的漂移导致的速度和位置误差发散,有效提高DR算法的性能。 图7 加入零速修正算法前后导航效果对比 为了进一步提高手机平台DR/GPS车载组合导航算法的适应性和导航性能,本文研究了手机平台车载导航算法的改进技术,首先就手机安装模式辨识算法进行了分析与设计,然后就汽车零速修正算法进行了研究,最后设计了相关验证实验。实验结果表明,本文研究的基于手机平台车载导航算法的改进技术,可以有效提高DR/GPS车载组合导航算法的适应性和导航性能。 [1] 李荣冰,刘建业,曾庆化,等.基于MEMS技术的微型惯性系统的发展现状[J].中国惯性技术学报,2004,12(6):88-94. [2] Robert Bogue.MEMS sensors:Past,present and future[J].Sensor Review,2007(27):7-13. [3] 刘建业,曾庆化,赵 伟,等.导航系统理论与应用[M].西安:西北工业大学出版社,2010. [4] 郑贵省.GPS/DR车载组合定位系统数据融合算法研究[D].天津:天津大学,2005. [5] Niu Xiaoji,Nasser Sameh,Goodall Chris,et al.An universal Approach for processing any MEMS inertial sensor configuration for land-vehicle navigation[J].The Journal of Navigation,2007(60):233-245. [6] 费程羽,苏 中,李 擎.行人惯性导航零速检测算法[J].传感器与微系统,2016,35(3):147-150. Improved technology of vehicle navigation algorithm based on MEMS of smartphone* ZHAO Xuan-yi, XU Jian-xin, XIONG Zhi, LIU Jian-ye (Navigation Research Center,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China) In order to improve adaptability and performance of DR/GPS vehicle navigation,improved technology of vehicle navigation based on smartphone platform is researched.Pattern recognition algorithm for installation of smartphone is analyzed and designed.Algorithm for zero velocity update is researched.Related tests are conducted to validate the improved technology research of vehicle navigation based on smartphone platform.The result of the test shows that the improved technology can improve the adaptability and the performance of DR/GPS vehicle navigation. smartphone platform; vehicle navigation; pattern recognition of installation; zero velocity update 2016—06—03 国家自然科学基金资助项目(61533008,61374115);江苏省普通高校研究生科研创新计划项目(SJLX15—0110,KYLX15—0264);江苏高校优势学科建设工程项目;江苏省“物联网与控制技术”重点实验室基金资助项目;江苏省六大人才高峰资助项目(2013—JY—013);中央高校基本科研业务费专项资金资助项目(NP2015406,NP20152212,NZ2014406) 10.13873/J.1000—9787(2017)06—0042—03 V 249 A 1000—9787(2017)06—0042—03 赵宣懿(1992-),男,硕士研究生,主要研究方向为车载组合导航系统,E—mail:xuanyizh@nuaa.edu.cn。
4 结 论
