跟踪微分器在陀螺信号去噪方面的应用
2017-06-07李贤涛晋超琼
朱 枫,张 葆,李贤涛,晋超琼,申 帅
(1.中国科学院 长春光学精密机械与物理研究所,吉林 长春 130033;2.中国科学院大学,北京 100049)
跟踪微分器在陀螺信号去噪方面的应用
朱 枫1,2,张 葆1*,李贤涛1,晋超琼1,2,申 帅1,2
(1.中国科学院 长春光学精密机械与物理研究所,吉林 长春 130033;2.中国科学院大学,北京 100049)
为了提高航空光电稳定平台的视轴稳定精度,采用跟踪微分器作为滤波器,对输入信号进行滤波,改善随机噪声对控制精度带来的负面影响。跟踪微分器会产生相位延迟,根据它得到的滤波信号及其微分信号,采用预报方法对滤波后的信号进行补偿。算法不依赖对象模型,计算量较小,易于实现。本文阐述了该算法的离散数学表达式,给出数值仿真分析,并在某型航空光电稳定平台上进行实验验证。结果表明:相较于巴特沃斯滤波器,跟踪微分器提高了阶跃响应的性能,最大超调量减少10.5%,上升时间缩短了4.5 ms,调整时间缩短50 ms。基本满足控制系统的实时性、快速性、稳定可靠、精度高、抗干扰能力强等要求。研究表明跟踪微分器对于航空光电稳定平台的精度提高,有比较好的实用价值。
跟踪微分器;滤波;随机噪声;相位延迟;航空光电稳定平台
1 引 言
航空光电稳定平台通常应用光电轴角编码器[1]采集位置信息,利用陀螺传感器测量平台转速,航空光电稳定平台的发展是和上述这些传感器的测量精度密切相关的[2]。其中,陀螺传感器是目前广泛应用于惯性空间提供基准方向的传感器,由于陀螺具有进动性和定轴性两种功能,陀螺以及用陀螺构成的稳定平台都具备稳定与跟踪两个作用[3]。在航空光电稳定平台中,主要利用陀螺稳定平台隔离载体受到的扰动,削弱扰动对视轴(LOS)运动的负面影响[4]。陀螺的主要作用是测量反馈,采集平台角速度信号反馈给控制器,在伺服系统中,从反方向补偿平台角速度的偏差,实现稳定视轴的目的。但是,由于陀螺自身的缺陷[5]和随机漂移等干扰[6],信号会受到随机噪声的污染,显著降低了陀螺输出的信噪比,期望的输出信号叠加了大量的陀螺噪声信号。所以,在系统的带宽范围内,输出信号在复现输入信号的同时,混有高频扰动,即噪声信号,这些噪声信号将直接影响系统的控制特性,如过渡过程、跟踪精度等,不利于视轴的稳定[7]。
为满足平台的稳定和跟踪性能、低速运动的平稳性等实际工程需求,必须对陀螺的测量数据进行滤波处理[8],尽可能地抑制随机噪声对视轴稳定精度的影响。并且一些小型平台受体积和成本的制约,无法应用高精度的陀螺传感器。
针对上述问题,本文将跟踪微分器的理论应用于传感器测量信号,提出了一种抑制随机噪声的滤波方法。本算法不需要明确被控对象模型,能够从含有噪声的输出信号中快速准确地提取输入信号及其微分信号。将此方法应用在处理航空光电稳定平台中陀螺所测量的角速度信号,并用于速度环的闭环控制,明显提高了信号的准确性和实时性,提高视轴稳定精度。
2 跟踪微分器的基本原理
跟踪微分器(TD)是由中国科学院韩京清研究员提出[9],最初的设计目的是为了解决在实际工程应用中,根据离散或被随机噪声污染的观测信号,精确提取出有用的连续信号及微分信号,但是对跟踪微分器的滤波性能并没有进行深入探讨。在对跟踪微分器的进一步研究之后,发现了它可以克服经典的求取微分信号的算法弊端,并且能够较强地抑制随机噪声信号对控制系统的影响。如今,跟踪微分器发展成为更适合在计算机应用的形式,其滤波性能也进入了人们的视线,因此也被称为TD滤波器[10]。
跟踪微分器的结构为:给定一个输入信号r(t),跟踪微分器将输出两个信号,分别为x1(t)和x2(t),其中x1(t)一直跟踪输入信号r(t)的变化,而x2(t)则为x1(t)的微分信号,当x1(t)快速跟踪r(t)时,便可以将x2(t)作为r(t)的近似微分信号。
跟踪微分器离散系统形式如下:
(1)
式中,x1、x2均为状态向量;h为连续系统离散化的积分步长;u为控制输入函数。
将离散系统(1)的最速控制综合函数记做u=fhan(x1,x2r,h),算法公式如下:
(2)
其中,fsg(x,d)=[sign(x+d)-sign(x-d)]/2。式中,r为时间常数T的倒数;h为连续系统离散化的积分步长。
把函数u=fhan(x1,x2r,h)代入到系统(1)中,得:
(3)
为了验证跟踪微分器的性能,用x1(k)-v(k)代替方程(2)的x1(k),就得到离散化的跟踪微分器的表达形式:
(4)
跟踪微分器在滤波的同时,会引起相位延迟。考虑跟踪微分器可以得到输入信号的微分值,借鉴运动学中的位移公式,可以采用预报的方法改善输出信号中的相位延迟[11]。具体做法是将滤波后得到的信号加上微分信号与预报步长的乘积作为近似输入信号,公式为:
(5)
式(5)为预报了n2步的公式。具体有以下两种预报的方法:
第一种为“先预报,后微分”,其具体算法如下:
(6)
式中,h1为预报时间,取值通常情况下比跟踪微分器中的滤波因子h0稍大(1倍到1.5倍)。
第二种为“先微分,后预报”,其具体算法如下:
(7)
这两种方法对相位损失的补偿效果相当,但是“先预报,后微分”的方法在滤波上有更好的效果,所以本文采用“先预报后微分”的方法。
3 噪声对系统的影响
航空光电稳定平台的简易控制系统框图如图1所示。
从图1可以看出,在速度环的反馈环节中,采用陀螺仪作为速度采集传感器,在此过程中,受到模拟信号的波动、A/D转换器参考电压的波动、电磁干扰、A/D转换精度等干扰,造成陀螺的输出信号包含有随机噪声。在工程应用中,这些随机噪声对视轴角位置有很大的影响。其中噪声的低频部分(以常值噪声作为典型信号)主要影响平台的漂移,噪声中的高频部分(用带限白噪声作为典型信号)主要影响视轴的抖动,干扰系统成像的清晰度[12]。简化的速度环控制系统框图如图2所示。
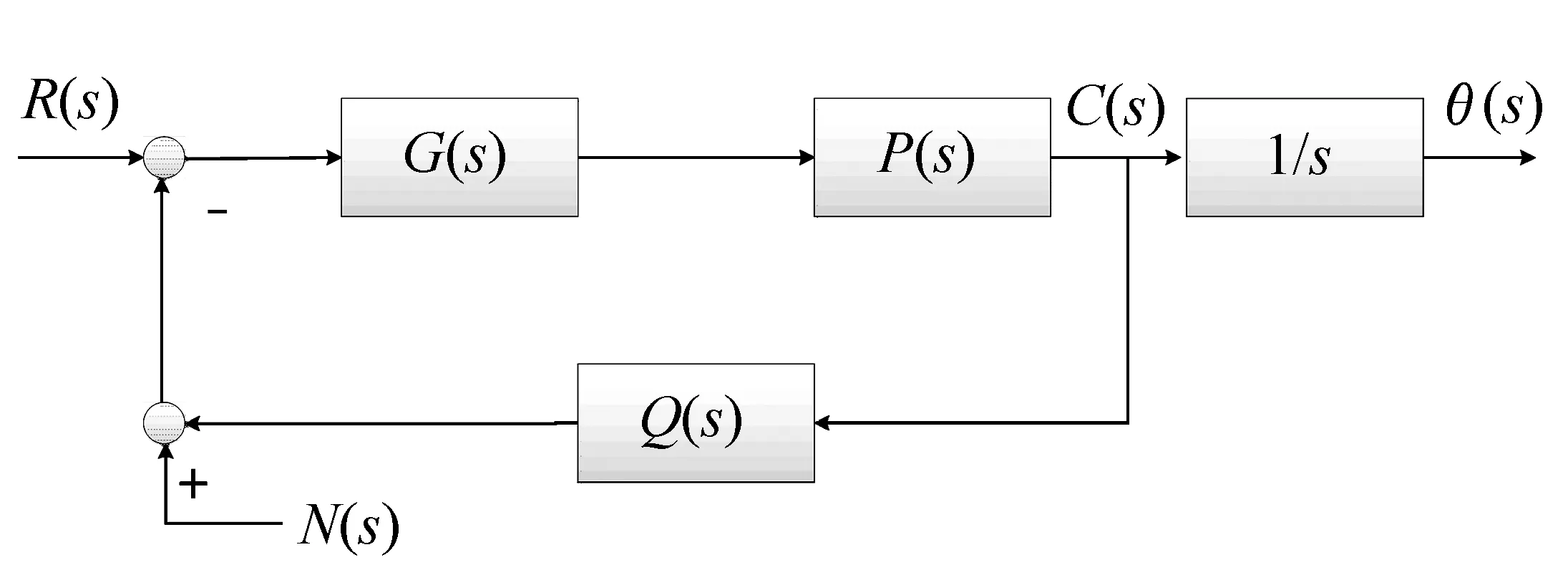
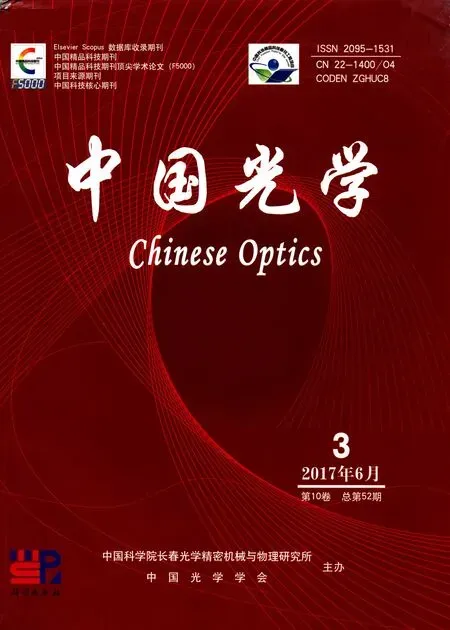
图2 速度环控制系统框图 Fig.2 Block diagram of cnotrol system in velocity loop
图2中,G(s)为控制环节,P(s)为系统模型,Q(s)为陀螺仪,R(s)为输入信号,C(s)为被控对象的输出信号,N(s)为陀螺的输出误差,θ(s)为视线角偏差。
从陀螺的输出误差N(s)到视线角偏差θ(s)的传递函数系统框如图3所示。
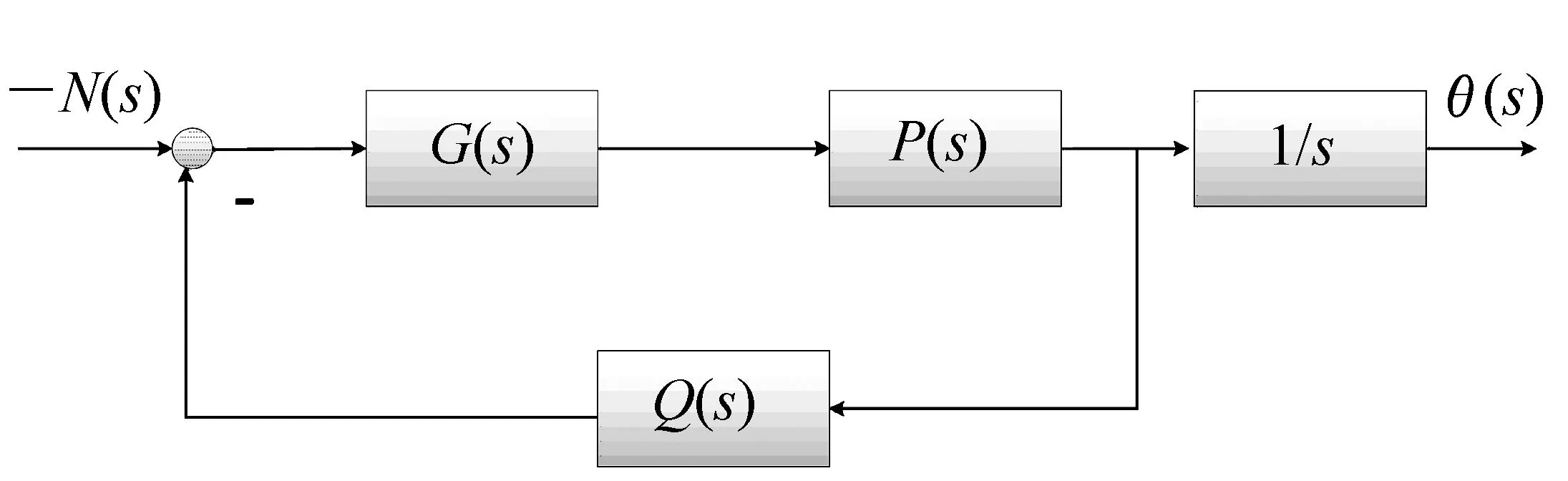
图3 从N(s)到θ(s)的系统框图 Fig.3 Block diagram of system from N(s) to θ(s)
由图3可知,陀螺的输出误差在经过积分环节1/s后,会累加到传感器的视线角偏差,对位置环造成干扰,进而影响视轴的稳定精度。
4 传感器测量精度的限制
陀螺仪传感器的测量精度有高有低,但是一些精度高的陀螺仪不仅体积大,而且造价昂贵。小型航空光电稳定平台受工艺成本和体积的限制,无法配备高精度的陀螺仪。工业中常用的陀螺仪传感器的价格为几千到几万元不等,图4所示为qrs14、DSP-1750两款陀螺。

图4 qrs14和DSP-1750陀螺传感器 Fig.4 Gyroscopes of qrs14 and DSP-1750
图5 两种陀螺的零位噪声 Fig.5 Zero noise of two kind of gyroscopes
在静止的实验条件下,分别采集qrs14和DSP-1750两款陀螺的零位噪声,如图5所示。
由图5可见,不同的型号的陀螺其零位噪声有很大的不同。所以,当受到制作成本和产品体积限制时,可以采用滤波的方法来提高传感器的测量精度,增强小型平台控制系统性能,进而提高视轴稳定精度。
5 数值仿真
为分析跟踪微分器的滤波性能和作用效果,利用MATLAB在SIMULINK环境下,搭建跟踪微分器的仿真模型。设置采样时间1.25 ms,固定步长、ODE4(Runge-Kutta)算法,仿真时间为0.4 s,其余初始状态均为零。
5.1 跟踪微分器的滤波效果
输入速度信号使光电稳定平台以幅值15°/s、频率为10 Hz做正弦运动,利用陀螺仪传感器采集平台运动的角速度,并经过A/D转换器将陀螺采集的模拟量转换成数字量输出,系统输出的原始陀螺信号如图6所示,利用此陀螺信号进行仿真实验。其中跟踪微分器的速度因子r=50 000 000,滤波因子h=0.002。参数r和h的具体选择原则,文献[13-14]给出了详细的说明。
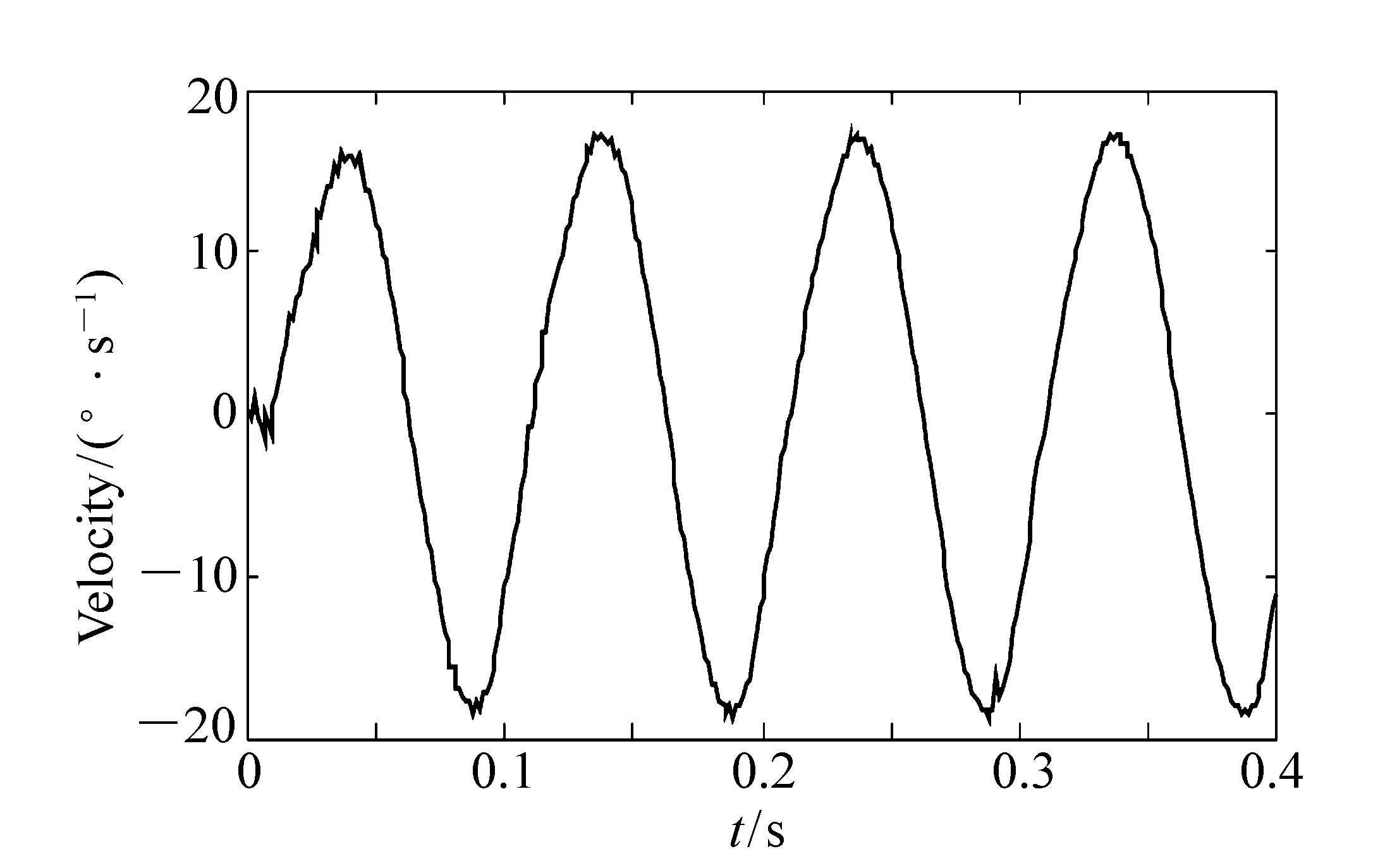
图6 正弦运动时的原始陀螺信号 Fig.6 Original gyro signal when sine movement
从图6可以看出,未经过处理的陀螺信号曲线受到噪声信号的干扰,很不平滑。这样的信号在实际的工程应用中,会造成平台的振荡以及视轴对靶标的指向偏差。
下面采用两种方法对陀螺信号进行滤波处理,分别为与“预报”方法结合的跟踪微分器和二阶巴特沃斯滤波器。其中预报时间取为0.002,二阶巴特沃斯滤波器的带宽为590 Hz,传递函数为:
(8)
两种滤波效果如图7所示。
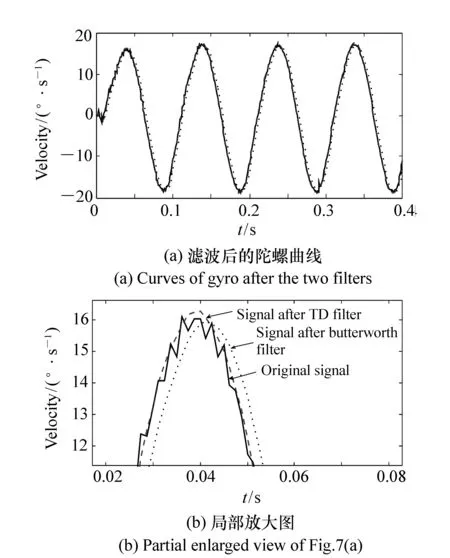
图7 两种滤波器对正弦运动的陀螺信号的滤波效果 Fig.7 Signal of Gyroscope filtred by two kinds of filter
由图7可以看出,上述两种方法都使陀螺信号的曲线更加平滑,滤波效果好。但是巴特沃斯滤波器的相位滞后比较大,而跟踪微分器的相位几乎和原始信号一致,保证了控制系统的实时性。可以看出由“先预报,后微分”的跟踪微分器所设计的滤波器,在相位方面基本和原信号保持一致,很好的解决了二阶巴特沃斯滤波器的相位延迟问题,使滤波效果得到改善,大幅度提升了信号的实时性,有利于改善视轴稳定精度,增强了控制系统的性能。
5.2 跟踪微分器的抗野值功能
在陀螺的实际测量信号中,由于电路中的电磁干扰以及测量误差等因素,使得测量值中常常含有偏离真值很远的野值。
而应用跟踪微分器很容易解决野值的剔除问题。利用TD剔除野值,也相当于进行一次滤波处理,但是进行滤波处理总是带来相位的损失,为了补偿这种相位损失,依旧利用TD给出的微分信号来进行适当的预报修正。
选取叠加有野值的正弦信号5sin(0.5t)+n(t)作为信号源,其中n(t)=n1(t)+n2(t),n1(t)为幅值在[-0.2,0.2]之间均匀分布的白噪声,n2(t/300)为幅值在[-10,10]之间均匀分布的白噪声用于充当野值。信号源的具体形态如图8所示。
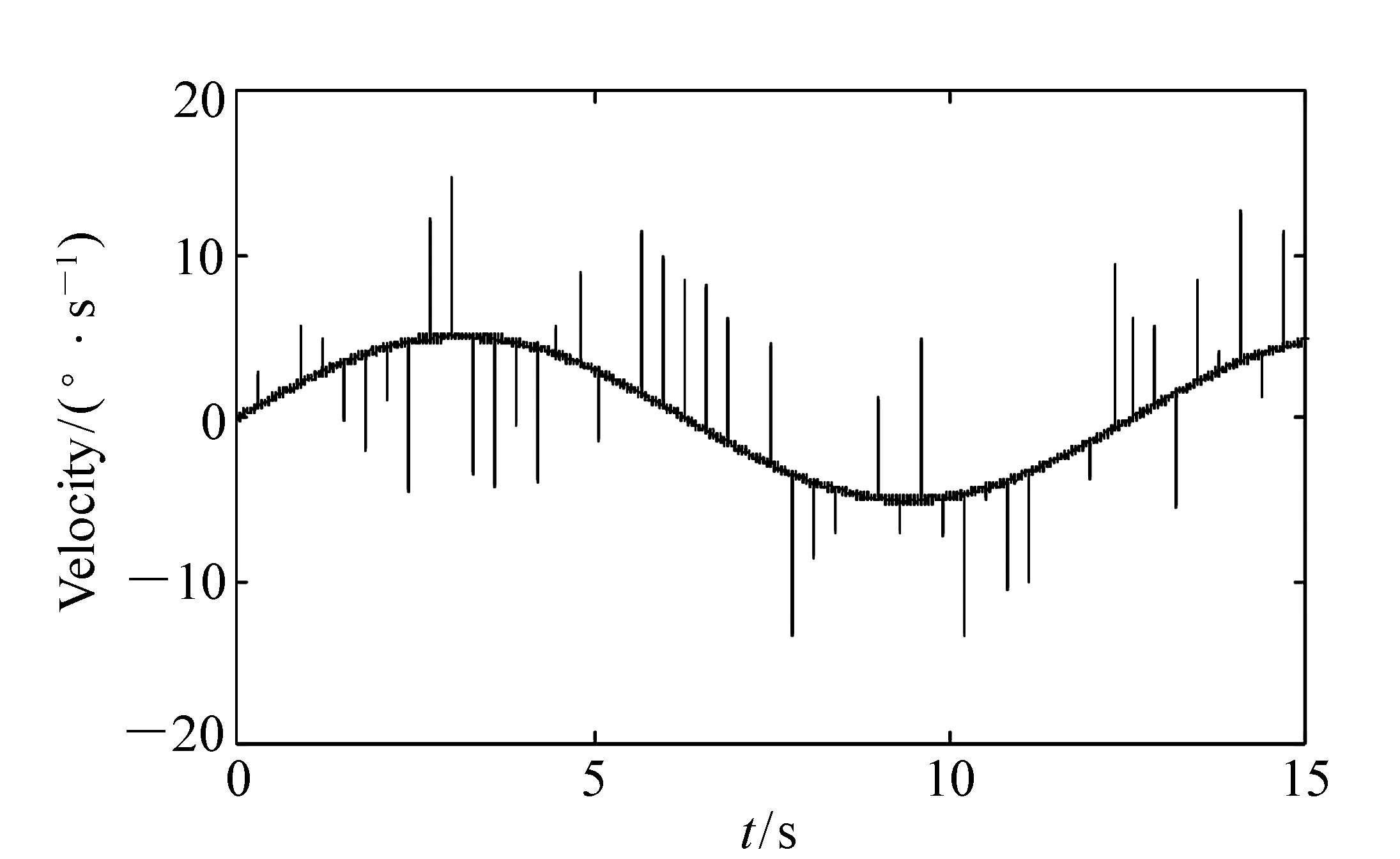
图8 叠加有野值的正弦信号 Fig.8 Sine signal with abnornnal value
分别用跟踪微分器(TD)和二阶巴特沃斯滤波器对上述信号源进行滤波处理,滤波结果如图9所示。
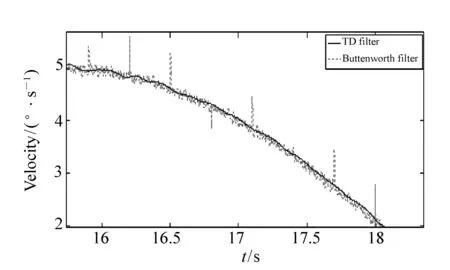
图9 两种滤波器对信号野值的剔除能力 Fig.9 Contrast of two kinds of filtes′ ability in removing abnormal value
由图9可以明显看出,经过跟踪微分器滤波后,信号中已经没有了异常值,曲线比较平滑,但是,信号在而巴特沃斯滤波后仍然存在较为突兀的野值。这说明跟踪微分器的抗野值能力明显优于二阶巴特沃斯滤波器,可以剔除掉信号中明显异常的数据,使陀螺信号的精度提高,适用于工程上的需求应用。
6 实验验证
为了验证在实际工程中跟踪微分器的滤波效果,在某型航空光电稳定平台上进行实验。实验环境如图10所示,为某型航空光电稳定平台和用于模拟飞机飞行中姿态变化的模拟转台。
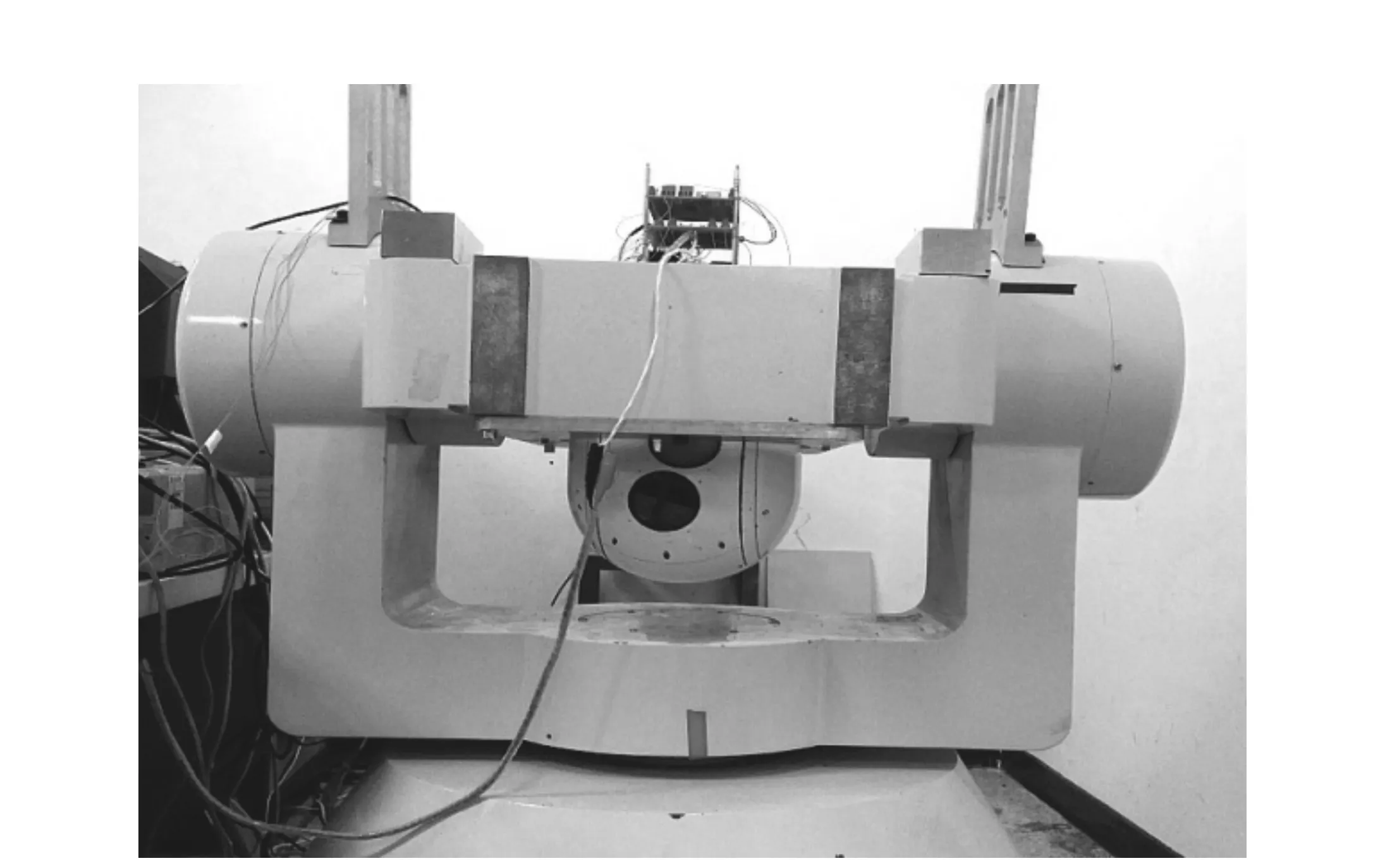
图10 航空光电稳定平台和飞行模拟转台 Fig.10 Aerial photoelectrical stabilized platform and swing table
以陀螺采集的角速度作为跟踪微分器的输入,选取的陀螺型号为qrs14。控制系统采用速度闭环反馈控制,将滤波后的陀螺信号反馈给输入,进行反方向补偿平台在运动过程中的角速度偏差。输入恒定速度值,让平台匀速转动,转动速度即输入值为10°/s,分别观察在跟踪微分器控制下和在二阶巴特沃斯滤波器控制下的系统的阶跃响应,两种滤波控制下系统的阶跃响应曲线如图11所示。
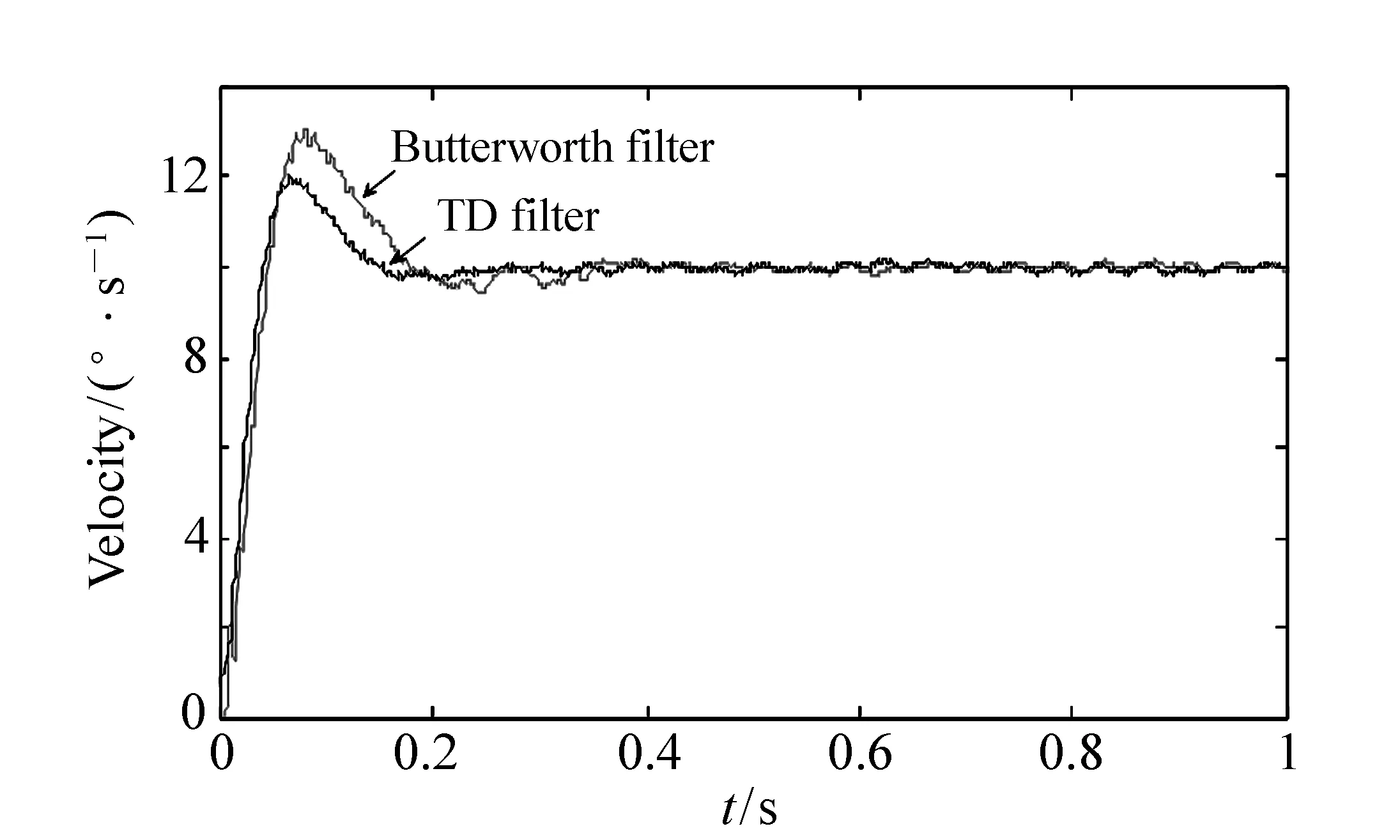
图11 两种滤波方法的速度阶跃响应 Fig.11 Step response of velocity of two kinds of filters
从图11可以直观的看出,跟踪微分器控制下的系统相较于巴特沃斯滤波器控制的系统,其波动小,平稳性好, 最大超调量减少10.5%,上升时间缩短了4.5 ms,调整时间缩短50 ms。结合预报方法后,系统的响应速度快,调节时间短,有效的提升了控制系统性能。
为了避免重复性误差,再次对平台进行不同速度的阶跃响应实验,依次设定恒定速度为20°/s、30°/s、40°/s、50°/s,比较跟踪微分器和巴特沃斯滤波器控制下的系统的阶跃响应。巴特沃斯滤波器控制下的系统阶跃响应如表1所示,跟踪微分器控制下的系统阶跃响应如表2所示。
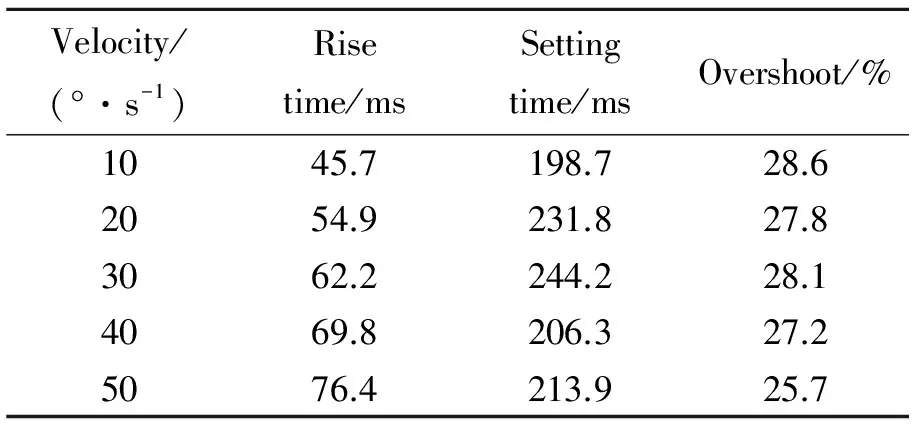
表1 巴特沃斯控制下的系统阶跃响应性能
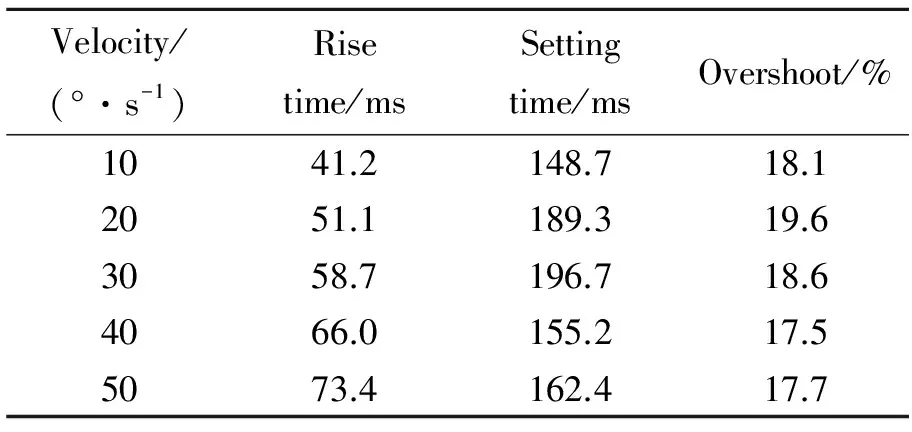
表2 跟踪微分器控制下的系统阶跃响应性能
通过对比表1、表2中的数据,可以看出平台在不同的转速下,跟踪微分器控制下的系统性能均优于二阶巴特沃斯滤波器控制下的系统性能,优化了系统的响应速度,减小了超调量。
根据上述实验结果可知,本文所提出的结合“预报”方法的跟踪微分器的滤波算法能够有效降低信号的随机噪声,优化控制系统性能,提高陀螺传感器的测量精度,进而提高视轴稳定精度,具有较高的可行性和实际工程应用价值。
7 结 论
给出了一种基于跟踪微分器的信号滤波方法,算法不需要明确被控对象模型,只有两个参数需要调整,待调参数有明确的功能和作用范围,易于调节和实现控制。
利用跟踪微分器得到的微分信号,结合“先预报后微分”的方法,改善了由跟踪微分器所产生的相位延迟问题。通过仿真实验,验证了跟踪微分器的抗野值功能,能够有效的剔掉信号中的明显异常值,显著提高了信号的准确性和实时性。
在某型航空光电稳定平台上进行了操作实验。结果表明,跟踪微分器波动小,平稳性好, 最大超调量减少10.5%,上升时间缩短了4.5 ms,调整时间缩短50 ms,均优于二阶巴特沃斯滤波器,达到了预期目标。
本文提出的方法实时性好,准确性高,易于实现,可以较好地改善输入信号的随机噪声问题,具备抗野值的功能。有效地解决了在小型平台中无法应用高精度传感器的问题,节约了成本。应用跟踪微分器实现对输入信号的良好复现,增强陀螺传感器的测量精度,从而提高视轴稳定精度,优化控制系统的性能。
[1] 孙树红,赵长海,万秋华,等.小型光电编码器自动检测系统[J].中国光学,2013,6(4):600-606. SUN SH H,ZHAO CH H,WAN Q H,etal.. Automatic detection system for miniature photoelectrical encoder[J].ChineseOptics,2013,6(4):600- 606.( in Chinese)
[2] 李贤涛,张葆,沈宏海.基于自抗扰控制技术提高航空光电稳定平台的扰动隔离度[J].光学 精密工程,2014,22(8):2223-2231. LI X T,ZHANG B,SH H H. Improvement of isolation degree of aerial photoelectrical stabilized platform based on ADRC[J].Opt.PrecisionEng.,2014,22(8):2223-2231.(in Chinese)
[3] 李慧,吴军辉,朱霞,等.速率陀螺式激光导引头稳定跟踪原理分析与仿真[J].红外与激光工程,2011,40(7):1337-1341. LI H,WU J H,ZHU X,etal.. Analysis and tracking principle for rate gyroscope laser seeker[J].InfraredandLaserEngineering,2011,40(7):1337-1341.(in Chinese)
[4] 丛爽,孙光立,邓科,等.陀螺稳定平台的自抗扰及其滤波控制[J].光学 精密工程,2016,24(1):169-177. CONG SH,SUN G L,DENG K,etal.. Active disturbance rejection and filter control of gyro-stabilized platform[J].Opt.PrecisionEng.,2016,24(1):169-177.(in Chinese)
[5] KIRKKO-JAAKKOLA M,COLLIN J,TAKALA J. Bias prediction for MEMS gyroscopes[J].IEEESensorsJournal,2012,12(6):2157-2163.
[6] PARK S,HOROWITZ R. Adaptive control for the conventional mode of operation of MEMS gyroscopes[J].MicroelectromechanicalSystemsJ.,2003,12(1):101-108.
[7] 汪永阳,戴明,丁策,等.大光电稳定平台中高阶扰动观测器的应用[J].光学 精密工程,2015,23(2):459-466. WANG Y Y,DAI M,DING C,etal.. Application of high order observer in EO stabilized platform[J].Opt.PrecisionEng.,2015,23(2):459-466.(in Chinese)
[8] 孙辉.机载光电平台目标定位与误差分析[J].中国光学,2013,6(6):912- 918. SUN H. Target localizationand error analysis for airborne electro- optical platform[J].ChineseOptics,2013,6(6):912-918.( in Chinese)
[9] 韩京清,王伟.非线性跟踪-微分器[J].系统科学与数学,1994,14(2):177-183. HAN J Q,WANG W. Nonlinear tracking differentiator[J].SystemsScienceandMathematicalScience,1994,14(2):177-183.(in Chinese)
[10] 韩京清,袁露林.跟踪-微分器的离散形式[J].系统科学与数学,1999,19(3):268-273. HAN J Q,YUAN L L. Discrete tracking differentiator[J].SystemsScienceandMathematicalScience,1999,14(3):268-273.(in Chinese)
[11] 韩京清.自抗扰控制技术[J].前沿科学,2007,1(1):24-31. HAN J Q. Active disturbance rejection control technique[J].FrontierScience,2007,1(1):24-31.(in Chinese)
[12] TIAN D P,SH H H,DAI M. Improving the rapidity of nonlinear tracking differentiator via feedforward[J].IEEETransactionsonIndustrialElectronics,2014,61(7):3736-3743.
[13] 韩京清,黄远灿.二阶跟踪—微分器的频率特性[J].数学的实践与认识,2003,03:71-74. HAN J Q,HUANG Y C. Frequency characteristic of second-order tracking-differentiator[J].MathematicsinPracticeandTheory,2003,33(3):71-74.(in Chinese).
[14] 朱承元,杨涤,荆武兴.跟踪微分器参数与输入输出信号幅值频率关系[J].电机与控制学报,2005,9(4):376-379. ZHU CH Y,YANG D,JING W X. Relation equations among the parameters of tracking-differentiator and the amplitude and frequency of its input-output signals[J].ElectricMachinesandControl,2005,9(4):376-379.(in Chinese)
Application of tracking differentiator to gyro signal denoising
ZHU Feng1,2, ZHANG Bao1*, LI Xian-tao1, JIN Chao-qiong1,2, SHEN Shuai1,2
(1.ChangchunInstituteofOptics,FineMechanicsandPhysics,ChineseAcademyofSciences,Changchun130033,China: 2.UniversityofChineseAcademyofSciences,Beijing100049,China)
In order to improve the aviation optical axis stabilization accuracy of the photoelectric stabilized platform, we use tracking differentiator as filter to decrease the negative effects of random noise on the control accuracy. on the basis of the filtered signals and their differentiated signals, the phase delays after being filtered are compensated by predicting. This algorithm is model-independent and easy to implement with small calculation. In this paper, the discrete mathematics of the algorithm is described, and the numerical simulation and experimental verification are conducted and applied to the photoelectric stabilized platform for aviation. The results show that the tracking differentiator, compared with the Butterworth filter, can improve the performance of the step response, shorten the maximum overshoot by 10.5%, cut down the rise time by 4.5 ms, shorten the setting time by 50 ms. The simulation and experiment proved the validity and practicability of the algorithm. It can meet the system requirements for real time, higher precision and rapid speed, as well as strong anti-jamming and stabilization. It also indicates that the tracking differentiator provide good value for the improvement of the precision of the photoelectric stabilized platform for aviation.
tracking differentiator;filter;random noise;phase delay;photoelectric stabilized platform for aviation
2017-01-25;
2017-03-29
国家高技术研究发展计划(863计划)资助项目(No.2013AA122102) Supported by National High-tech R&D Program of China(No.2013AA122102)
2095-1531(2017)03-0355-08
TP273
A
10.3788/CO.20171003.0355

朱 枫(1992—),女,吉林省吉林市人,硕士研究生,2014年于山东大学获得学士学位,主要从事伺服控制及数字滤波方面的研究。E-mail:zf0109@126.com
张 葆(1966—),男,吉林磐石人,研究员,博士生导师,1989年、1994年于长春光机学院分别获得学士、硕士学位,2004年于中国科学院长春光学精密机械与物理研究所获得博士学位,主要从事航空光电成像技术方面的研究。E-mail:cleresky@vip.sina.com
*Correspondingauthor,E-mail:cleresky@vip.sina.com