基于多轴机械臂的外部指令控制策略分析
2017-06-07刘嘉
刘嘉
基于多轴机械臂的外部指令控制策略分析
刘嘉
(太原工业学院机械工程系,山西太原030008)
本文以多轴机械臂为研究对象,基于CytonVeiwer软件,进行了机械臂运动学建模,实现了手柄对机械臂的控制,并将其运动轨迹导入到MATLAB软件中进行仿真,得到对机械臂运动轨迹的再现。通过上述工作,确定了仿真方法的可行性,为多轴机械臂控制仿真提供了借鉴方法。
多轴机械臂;运动学建模;手柄
本文针对多轴机械臂展开分析,研究外部指令控制下的机械臂运动控制策略。依据D-H方程进行机械臂的运动学模型的建立,并依据该模型,确定了机械臂运动仿真的方法。本文中使用的机械臂的DH参数如表1所列。

表1 实验室机械臂的DH参数表
根据上表得到,机械臂各连杆的齐次变换矩阵依次为:


1 机械臂的建模与仿真
首先,根据D-H参数,使用link函数建立机械臂各种连杆模型。
格式:L=link([alpha A theta D sigma offset],CONVENTION)
(1)sigma:0表示连杆对应的关节类型为旋转关节;1表示连杆对应的关节类型为平移关节。对应关系,连杆1对应关节1,以此类推。
(2)CONVENTION:字符串'standard'表示标准DH方法;字符串'modified'表示非标准的D-H方法。
(3)alpha A theta D:用D-H方法得到的D-H参数。
特别注意:对于旋转关节,theta是关节变量,表示关节角,随关节的旋转而变化,其余三个参数则为常数,反映了连杆之间的几何关系。对于平移关节,D为关节变量,表示关节位移,随关节平移而变化,其余三个参数则为常数,反映了连杆之间的几何关系。在使用该函数建模时,关节变量一律取为0即可。其它参数则直接使用D-H参数值。
(4)offset:使连杆模型与实际连杆一致的关节变量的补偿值。
offset的计算方法:offset=D-H参数中的关节变量取值-建模时实际关节的值。前面为7轴智能化机器人手臂各连杆指定坐标系时,机械臂处于直立状态,各关节的角度值均为pi,因此,这里offset的计算方法为:offset=D-H参数中的关节变量取值-pi。
7轴智能化机器人手臂的各连杆模型为:
连杆1:L{1}=link([pi/2,0,0,120,0,-pi/2-pi],'standard');
连杆2:L{2}=link([pi/2,0,0,0,0,pi-pi],'standard');
连杆3:L{3}=link([pi/2,0,0,140.8,0,pi-pi],'standard');
连杆4:L{4}=link([-pi/2,71.8,0,0,0,pi/2-pi],'standard');
连杆5:L{5}=link([pi/2,71.8,0,0,0,0-pi],'standard');
连杆6:L{6}=link([pi/2,0,0,0,0,pi/2-pi],'standard');
连杆7:L{7}=link([0,0,0,129.6,0,0-pi],'standard')
L是一个CELL数组。
然后,根据连杆模型,使用robot函数创建机械臂模型。有了机械臂的连杆模型之后,就可以用robot函数创建机械臂的计算模型。
模型名称=robot(LINK,name)
LINK:就是用link函数创建的各连杆模型。
name:机械臂的名字,为字符串。
2 机械臂动作的仿真
2.1 路径的规划
基于多轴手臂路径规划工具箱,在其中输入相关模拟参数,然后点击“运动到制定位姿”按钮,观察手臂的运动路径及姿态再点击“顺序记录位姿”按钮,记录下手臂运行后的轨迹及控制数据。用同样方法模拟多组数据并记录,让后点击控制界面内的“计算逆解并存储”按钮,将以上运行数据保存入电脑。
2.2 CytonViewer动作仿真
将机器人手臂、游戏手柄正确接入电脑,选择初始姿态,然后打开CytonViewer模拟仿真软件,设置好相关参数,并点击菜单栏内的“plugins”按钮下载该软件内的RecordPlayback和Jobstick插件。其中,界面左侧窗口显示手柄操控方向按钮,通过操控手柄不同的方向键设置不同的方向控制键;界面右侧窗口显示手柄操控功能按钮,任意选择手柄两个功能按键控制手臂夹子的打开和合闭。设置完成后点击“OK”按钮。
上节手柄操控设置完成后回到主界面,点击录像的小红点按钮开始录像,通过手柄遥控机械臂进行动作的仿真,然后将记录的仿真数据上传到电脑上存储。
2.3 仿真结果及分析
运用Robotics Toolbox的drivebot函数可以实现机械臂模型的可视化。运行程序后,仿真结果如图1所示。在图1中,{x,y,z}表示机械臂末端执行器的位置,ax,ay,az为采用RPY旋转表示的末端执行器的姿态。q1,q2,q3,q4,q5,q6,q7分别表示六个关节角的角度值。当关节角的值发生改变时,图1中机械臂的姿态发生相应的改变。
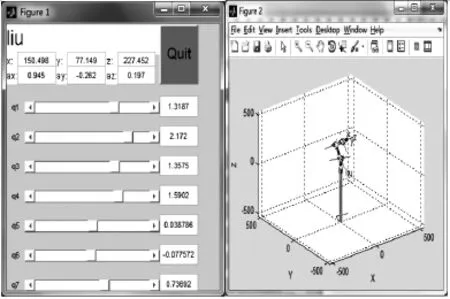
图1 各关节控制条变化及各关节角改变时机械臂姿态示意图
通过分析仿真结果,确定了本文中所采用的基于修改后的D-H方法在进行多轴机械臂的运动学建模方法可行,分析结果基本正确。同时,根据对仿真数据的分析,数据运行可能出现不稳定的状态,且存在一定的突变概率,意味着机械臂实际运行有可能出现奇异点。则在采用本方法进行多轴机械臂数据建模的过程中需要对数据进行预处理,事先仿真模拟,确定机械臂运行奇异点,从而保证机械臂可以依据预定轨迹运行。
3 结束语
本文结合当今机器人的研究状况和发展方向,针对多轴机器人手臂进行了以下几个方面的工作:
(1)运用D-H参数法建立了机械臂的坐标系,确定了在给定位姿情况下,机械臂通过相应地旋转得到符合给定位姿的途径。
(2)运用MATLAB软件内的机械臂二次开发软件,对机械臂进行路径的规划和运动轨迹的仿真,并运用CytonViewer软件连接手柄对机械臂进行控制操作仿真。
通过上述工作,确定了多轴机械臂的运动学模型,完善了外部指令对机械臂的控制策略,为今后的多轴机械臂控制提供了借鉴方法。
[1]朱世强,王宣银.机器人技术及应用[M].杭州:浙江大学出版社,2001.
[2]向先波.主从遥控机械手控制系统研究[D].武汉:华中科技大学,2003.
[3]刘金锟.机器人控制系统的设计与MATLAB仿真[M].北京:清华大学出版社,2008.
[4]蔡自兴.机器人学[M].北京:清华大学出版社,2002.
[5]孙增圻.机器人系统仿真及应用[J].系统仿真学报,1995,7(3):23-29.
[6]郑秀娟.移动机械臂的运动控制与轨迹规划算法研究[D].武汉:武汉科技大学,2012.
[7]范叔炬.机械臂运动学算法设计[D].杭州:浙江大学,2008.
Based on the Action of Multi-Axis Motion Control Analysis of Mechanical Arm
LIU Jia
(Taiyuan Institute of Technology Department of Mechanical Engineering,Taiyuan Shanxi 030008,China)
This paper uses multi axis manipulator as the research object,based on the cytonveiwer software,the manipulator kinematics modeling,the handle control of the manipulator,and the simulation of its trajectory into MATLAB software,get the representation of the manipulator trajectory.Through the above work,the feasibility of the simulation method is confirmed,which provides a reference for the simulation of multi axis manipulator control.
multi-axis manipulator;kinematics modeling;handles
TP241
A
1672-545X(2017)02-0220-03
2016-11-27
刘嘉(1982-)男,山西祁县人,讲师,硕士,主要研究方向:机械设计及理论。