一种小型可拆卸式全地形履带车的设计
2017-06-07陈楠庞根蒂涂鹏飞董浩存
陈楠,庞根蒂,涂鹏飞,董浩存
一种小型可拆卸式全地形履带车的设计
陈楠1,庞根蒂2,涂鹏飞3,董浩存1
(1.沈阳理工大学汽车与交通学院,辽宁沈阳110159;2.沈阳理工大学自动化与电气工程学院,辽宁沈阳110159;3.武汉工程大学机电工程学院,湖北武汉430205)
为解决小区域内搬运重物不便等问题,设计出一款单片机遥控、电机驱动的小型运货履带车。履带车参考大型履带战车行驶方式,适用于全部地形下的行驶,承载物品的空间可以根据用户的需要进行拆装调节。
履带车;全地形;可拆卸;电子控制
我国如今已经步入了老龄化社会,据调查统计,2003年我国60岁以上老龄人口占总人口比例为15.59%,至2014年,这一比例增加到21.03%.当市民特别是老年人购买了米面油粮等较大较重的生活物品,在经过坡道楼梯等复杂地形会成为比较困难的一个问题。另外,各种货物运输站点、家庭野外出游等工作和生活的场所,也需要一些小型的搬运物品的轻便装置。
目前,搬运物品爬楼梯等障碍的小型装置有如下几种:一是李冠群的新型电动自平衡爬楼车[1]与李佳玲的行星轮式便携可变形多功能运货上楼机[2],两者都是通过行星轮结构实现自平衡来解决爬楼的问题,但这些车体或机体只适用于爬楼梯,无法在平地及全地形行驶,而且需要人力驱动;二是冯鹏的智能楼梯平地两用运货小车[3],根据行星轮的结构特点可以实现在平地与楼梯之间运动类型的转换,但是对于较复杂路面例如泥地、石子路面等仍会出现行驶困难,且整车设计自重达75 kg,长度超过3 m,整体过于庞大,不适用于家庭等小区域的地方;三是张金玲等研究的全地形越野履带车底盘[4],这款履带车具备跨越普通城市道路所有路面障碍的能力,其底盘重25 kg,体积为800 mm×800 mm×800 mm,不可拆卸,普通用户家庭存放不是很方便。检索发现,尚未有一种小型的、可拆卸的、适用于全地形搬运物品的履带车。
鉴于此,本文设计了一款采用电子控制、具有可拆卸功能、可以在全地形下行驶的小型履带车。履带车可采用碳材料等轻量化的材料制造,整车自重约为15 kg,整车长925mm,宽550mm~750mm(在此范围内可调),高310mm,可承载40 kg的货物。整个履带车由机体部分(实现可拆卸功能)、电机、传动及行驶部分(实现全地形行驶功能)、电子控制部分等三部分组成,整体的结构如图1所示。以下介绍各主要部分设计。
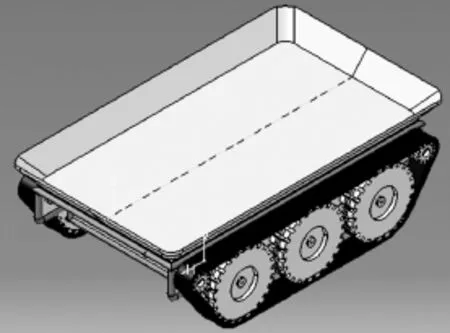
图1 履带车
1 机体部分
履带车机体部分的设计,以增加受力、减小体积和自重作为重点,尽可能的增加履带车的实用性,并且降低成本。履带车机体部分体积为925 mm×550 mm×310 mm,由机架、底板、盖板、载货托盘等部件组成。
机架采用Φ20 mm的管制材料制成。在机架底部嵌入10 mm厚的底板,底板上有电动机、蓄电池以及齿形带张紧轮支座等零部件的安装孔,结构如图2所示。
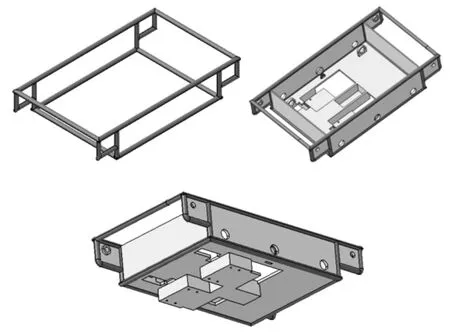
图2 机架及底板
履带车的机体结构如图3所示。盖板覆盖在机架的上面,其上设计有等距离的圆孔,与载货托盘下表面上的等距离凸圆柱一一对应。履带车存放时,可将载货托盘从车上取下单独存放,这样余下的机体部分高度降低,可减少占用的存放空间。当运载比重较小而体积较大的货物时,还可将载货托盘调节至适当宽度来安装,载货宽度可调节到750mm.这一设计,实现了履带车的可拆卸功能,易于存放,还可调节载货托盘宽度来适应不同体积的货物。
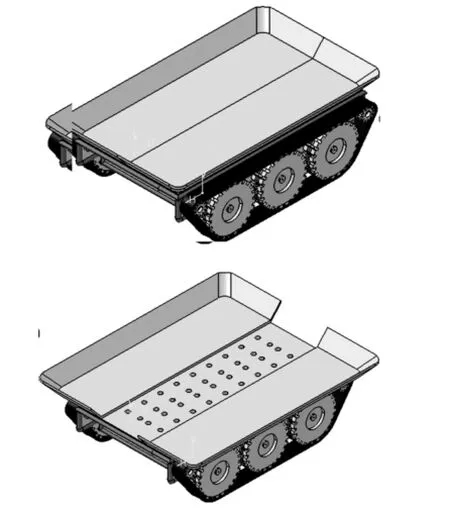
图3 盖板及载货托盘
2 电机、传动及行驶部分
2.1 电机部分
履带车的行驶部分为履带式,全车由两台小型电机分别驱动两侧的履带驱动轮,由电子同步装置对电机输出转速进行同步,电机动力经传动机构降速增扭后传递给履带驱动轮,电源来自于充电电池。
履带车自重约为m=15 kg,设计载重M=40 kg,履带轮直径210 mm,一般橡胶履带最大的附着系数Φ=0.8~1.0[5]
由双电机进行驱动,因此履带车行驶时每侧履带轮所需的驱动力矩T为[6]:

履带车设计车速为v=0.5 m/s左右,根据整车的结构,选定传动机构的传动比为i=4,选定安全系数为2,所需驱动电机的转速n、功率P计算如下:
选定了如图4所示台松直流齿轮减速电机DC24V正反转马达调速。额定功率为250W~300W,选定减速比为10,额定转速为180 rpm~360 rpm,自重为5 kg.

图4 电动机
所选电机在250 W及以上功率的情况下工作,要求履带车可以在这种情况下连续工作3 h以上,因此选择了优贝特锂电池,工作电压为24 V,容量为20 Ah,自重为2.8 kg,蓄电池尺寸为150 mm×150 mm×70mm.
2.2 传动部分
传动部分由一对开式螺旋锥齿轮、一对齿形带轮3及齿形带4组成,如图5所示。一对螺旋锥齿轮1和2将电机的传来的动力减速增矩并传给前履带轮,由齿形带传递给后履带轮。圆柱齿轮的传动比i=4.
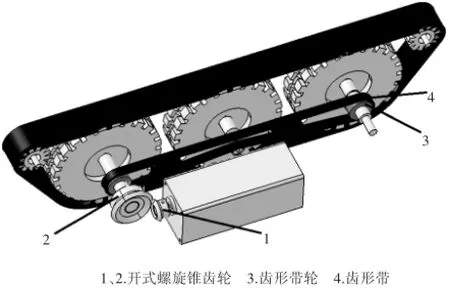
图5 传动部分
传动部分的四轮驱动设计将最大限度的增加动力性和行驶稳定性,通过调节传动比将驱动履带轮的基础转速控制在了0.5 m/s左右的范围。
2.3 行驶部分
动力传递到履带轮,由履带轮带动履带完成履带车的行驶,大履带轮的直径为210 mm,大履带轮与小履带轮之间履带所形成的倾斜角度为55°.在履带车的整个行驶过程中,将楼梯作为极端的障碍考虑,在此设计难点下进行分析设计。
楼梯是履带车行驶的全地形中比较特殊的一种地形,现将其作为难点做出分析。根据我国《建筑楼梯模数协调标准》的规定[7]:普通楼梯踏步的高度a不能大于210 mm,同时不能低于140 mm,楼梯踏步的宽度b不能超过320 mm,同时不能低于220 mm,并且楼梯的高度和宽度应该满足2a+b小于等于600 mm.以步高170 mm、步宽240 mm的楼梯为例,其斜角约为35°,如图6所示。

图6 爬楼梯示意图
在这个基础上对履带车进行爬楼梯时的稳定性计算。履带车的设计横向跨度较大且高度较低,整车采用横向对称布置,攀爬楼梯不存在横向倾翻的可能,而在纵向却可能倾覆,因此需要对其上下楼梯的极限倾翻角进行计算。计算数据图如图7所示。

图7 数据位置关系
已知一个电动机重G1=5 kg,距离履带车几何形心的纵向距离a1=50.01 mm,蓄电池重G2=2.8 kg,a2=-12.99 mm.整个履带车的重心位置a计算如下:

履带车重心高度hg=90 mm,最后一个支重轮轴线距离驱动轮轴线的水平距离lq=235 mm.履带车可翻越的最大障碍角度为[8]:

履带车翻越的最大障碍楼梯角度为65°,因此履带车能稳定翻越障碍,保证了在爬楼梯的极端条件下载货行驶的适应能力,保证了实现全地形功能。
3 电子控制部分
履带车采用电机驱动、电子控制,空车或承载不超过额定的40 kg的情况下,用手持无线遥控器可控制其前进、转向、倒退等功能,控制单元安装在机体后方预留的空间。电子控制的硬件系统主要以89C52单片机为核心控制器,包含了主控制器模块、电机驱动模块、键盘模块、红外线通信模块、电源模块等。红外线通讯、单片机处理、电机驱动和执行电机,控制系统每次刷新时间是10 ms,完成上一次即刻进去下一次循环。
整套控制系统具体的运行流程为:打开机器的电源开关,由人通过遥控发送开启信号,将开启信号传输到单片机,有单片机输出控制电机驱动电路的开启;之后便是控制履带车运载货物运动,通过遥控器发出的前进、后退和转弯指令,经过对接收的信号进行处理之后,单片机会相应的输出履带车运动所需要的不同组别的电信号,分别控制电机驱动进而控制电机的电源输入,最后起到控制电机运转的功能,当两侧电机驱动车运动时,码盘编码器会将两侧运动速度返回至主控制器,通过主控制器改变对电机驱动的信号消除转速差,最后实现控制履带遥控车运动的功能。当然,如果需要调速,由单独的控制开关发出快中低速信号直接控制电机驱动,最后实现对电机调速。系统总框图如图8所示。
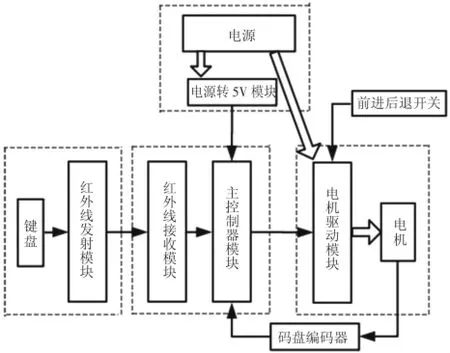
图8 控制系统总框图
这款可拆卸式全地形履带车按1:3比例缩小的模型已制作完成并进行了实验,可实现所设计的运动功能。由于考虑到制作成本,模型没有采用碳材料等轻量化的材料制造,而是价格较低廉的亚克力板,故其载重量等指标尚未验证。
4 结束语
本文设计了一款可以在小区域内运载货物的履带车,履带车能稳定的跨越草地、石子路、楼梯等障碍,载货空间可拆卸的设计操作简便,能携带大体积的物品。由于采用双电机电子同步,因此在行驶前进时会有轻微的方向上的偏移且存在一定的噪音,有待进一步的改进。
[1]李冠群,宋其江,杨焱强.一种电动自平衡爬楼车的设计与研究[J].机器人技术,2016,35(7):44-48.
[2]李佳玲,陈亦开,管珣,等.行星轮式便携可变形多功能运货上楼机的研制[J].湖北理工学院学报2015,31(4):17-20.
[3]冯鹏,石爱平,刘进,等.智能楼梯平地两用运货小车的设计[J].现代制造技术与装备,2014(1):14-21.
[4]张金玲,陈浩,赵兴辉,等.一种全地形越野履带车底盘的设计[J].内燃机与配件,2016,(9):1-3.
[5]唐经世.工程机械底盘学[M].成都:西南交通大学出版社,2011.
[6]濮良贵,陈国定,吴立言.机械设计[M].9版.北京:高等教育出版社,2013.
[7]中华人民共和国国家计划委员会.GBJ101-87建筑楼梯模数协调标准[S].北京:中国标准出版社,1987
[8]冯益柏.坦克装甲车辆设计[M].北京:化学工业出版社2014.
Design of a Small Detachable all Terrain Tracked Vehicle
CHEN Nan1,PANG Gen-di2,TU Peng-fei3,Dong Hao-cun1
(1.Automobile and Traffic College,Shenyang Ligong University,Shenyang Liaoning 110159,China;2.Automation and Electrical Engineering College,Shenyang Ligong University,Shenyang Liaoning 110159,China;3.School of Mechanical&Electrical Engineering,Wuhan Institute of Technology,Wuhan Hubei 430205,China)
In order to solve the problem of area carrying heavy inconvenience,the design of a small cargo tracked vehicle with a single-chip remote control,motor drive.Track vehicles refer to large track chariot driving mode,suitable for all terrain under the driving,the space can be carried out according to the user's needs of the user's need for disassembly and assembly.
caterpillar vehicle;all terrain;removable;electronic control
U489
B
1672-545X(2017)02-0071-04
2016-11-05
2016年国家级大学生创新训练计划项目(项目编号:201610144018)
陈楠(1994-),男,四川什邡人,本科,研究方向:内燃机设计。