基于长基线测量的水下电场特性分析研究
2017-06-07莫立新焦达文
莫立新,焦达文
基于长基线测量的水下电场特性分析研究
莫立新1,焦达文2
(1.海军驻大连426厂军事代表室,辽宁 大连 116005;2.大连测控技术研究所,辽宁 大连 116013)
目的研究海洋环境电场的空间分布。方法借助长基线测量系统提供的一定空间增益,提高测量信号的强度,从而测量低频电场不同测量体在24 h内的幅度变化,以及0.1,0.2,0.5,1,10 Hz等5个不同典型频点的概率密度分布。结果水下电场的空间分布会由于电极间距的不同导致幅度有所差异,但整体的变化趋势基本一致。0.1,0.2,0.5,1 Hz频点随着频率的增加,幅度对整体的贡献越来越小,而10 Hz频点的幅度变化无明显规律。在24 h的连续观测中,DC-1 Hz极低频电场的幅度分布并不满足正态分布,而是随着时间变化具有一定的规律性。结论得到了不同频点的海洋水下环境电场的空间分布特性。
海洋环境水下电场;典型频点;概率密度分布;长基线测量
海洋水下环境电磁场一方面有着重要的科学研究价值和显著的经济效益[1],另一方面其作为舰船测试的主要背景场,会对目标信号检测造成一定影 响[2—4]。只有充分掌握环境电磁场的基本特性才能更好地为目标水下电场测试提供帮助。水下电磁场的探测距离短制约着水下电场目标测试的发展[5—7],长基线测量系统作为一种新的测量方式,通过增大电极间距获得空间增益,进而提高对微弱信号的感知能力[8—11]。文中通过开展长基线测试方法研究,分析不同位置测量体采集的电场数据,研究低频电场在空间上的幅度变化、典型频点的概率分布,进而掌握海洋环境水下电场的空间分布规律。
1 低频电场的幅度变化
采用的长基线水下电场测量系统由4只银/氯化银电极构成,分别为补偿电极、参比电极和2个测量电极,频率范围为DC-1 kHz,电极最大间距可达40 m,用于获取水下电场数据。测量信号可反映环境电场大尺度变化情况。长基线电场传感器测量如图1所示。
如图2所示,对比分析位于不同位置处的测量体所测得的水下低频电场在24 h观测中的幅度变化。
从图2中可以看出,虽然由于电极距不同导致低频电场的幅度大小不同,但不同位置处海洋环境电场整体的变化趋势是一致的。低频电场的幅度在晚上7点之后逐渐降低,凌晨1—3点时幅度达到最小,3点之后又逐渐升高,上午7点至晚上7点幅度有些小的起伏。
2 典型频点的概率分布
研究典型频点概率分布的目的是分析不同频点的幅度变化规律及概率分布情况,它可以清晰地表现出不同频点对整体幅度变化的贡献。这里仍然对比分析24 h典型频点的幅度变化和概率分布。
可以发现,频点0.1,0.2,0.5,1 Hz的幅度变化趋势与低频电场的变化趋势近似,并且随着频点频率的增加,幅度对整体的贡献越来越小。10 Hz的幅度变化并不存在这种特点,没有明显的规律。对不同频点幅度的概率分布统计如图4所示。
从概率密度分布图中可以看出,对于这5个典型频点的幅度,除10 Hz的概率密度分布与正态分布有些相似之外,其他频点的幅度均与正态分布曲线相差甚远。

图3 连续24 h内典型频点的幅度变化曲线

图4 不同测量体0.1 Hz频点幅度的概率分布
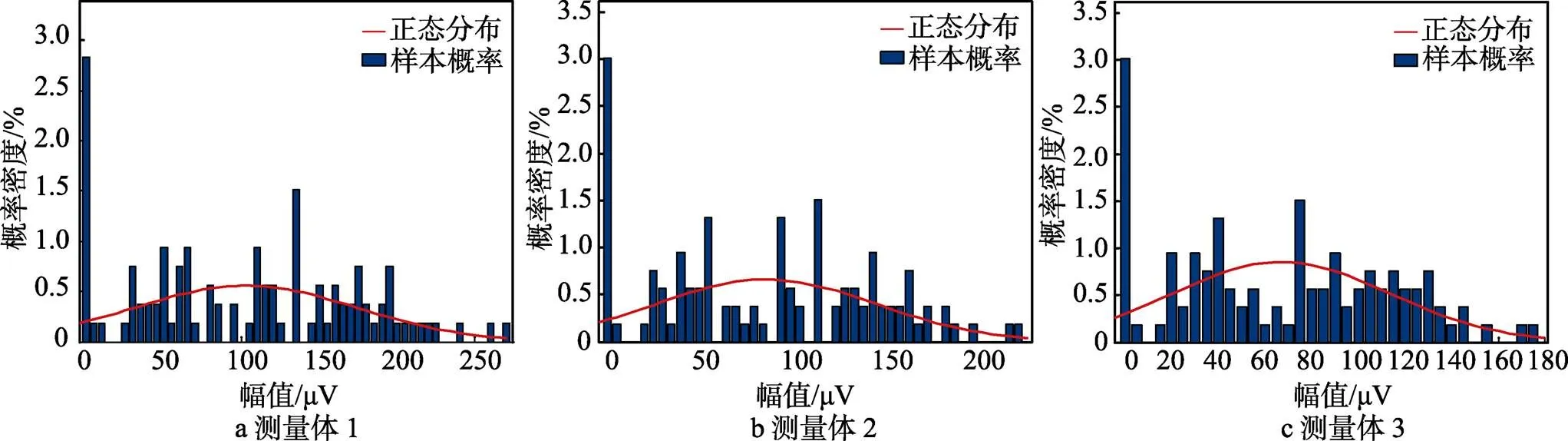
图5 不同测量体0.2 Hz频点幅度的概率分布

图6 不同测量体0.5 Hz频点幅度的概率分布
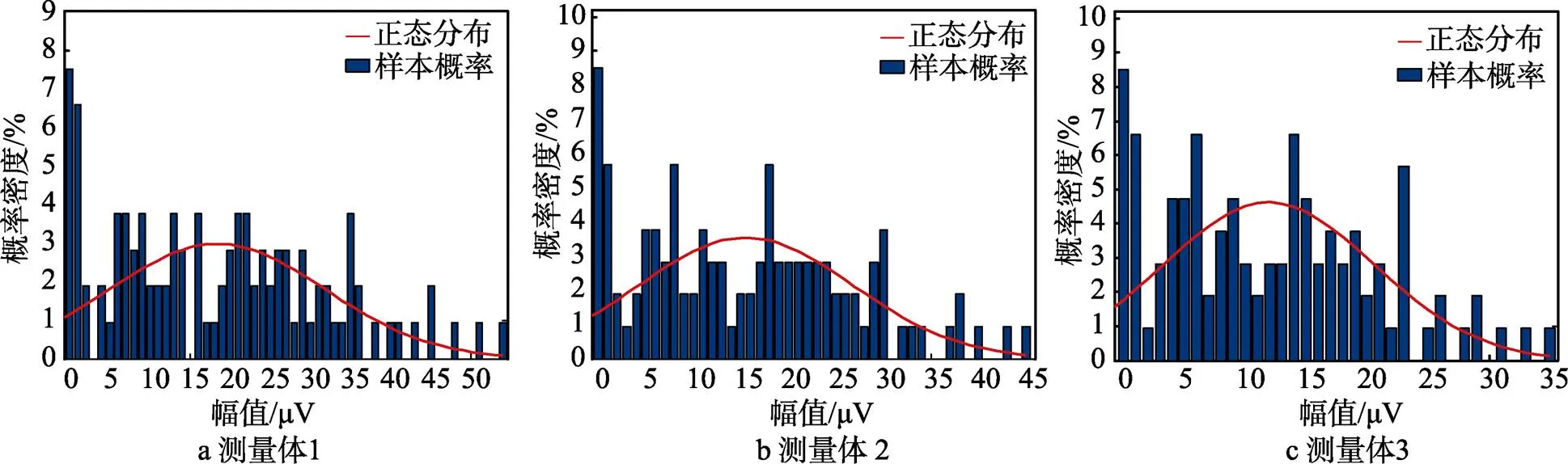
图7 不同测量体1 Hz频点幅度的概率分布

图8 不同测量体10 Hz频点幅度的概率分布
3 结论
1)海洋环境水下电场的空间分布会由于电极间距的不同而体现出幅度有所差异,但整体的变化趋势基本一致。
2)在选取的典型频点中,频点0.1,0.2,0.5,1 Hz的幅度变化趋势与低频电场的变化趋势相近。随着频率的增加,幅度对整体的贡献越来越小。10 Hz频点的幅度变化并不存在这种特点,没有明显的规律。
3)在24 h的连续观测中,DC-1 Hz极低频电场的幅度分布并不满足正态分布,而是随着时间变化具有一定的规律性。
[1] 田稷. 基于虚拟仪器的海洋环境水下电磁场观测系统设计[J]. 舰船科学技术, 2012, 34(11): 129—130.
[2] 江立军. 海洋环境水下电磁场基本特性及抑制方法研究[J]. 装备环境工程, 2014, 11(3): 6—7.
[3] 李琳琳. 海洋环境工频磁场量级的快速估计方法[J]. 装备环境工程, 2011, 8(3): 94—95.
[4] 林春生, 龚沈光. 舰船物理场[M]. 北京: 兵器工业出版社, 2007: 3—22.
[5] 董冠奇. 水下主动电场定位系统的有限元仿真[D]. 成都: 电子科技大学, 2015.
[6] 张海滨. 海洋背景磁场数值模拟及东中国海上层海流磁场分布[D]. 青岛: 中国海洋大学, 2008.
[7] PODNEY W. Electromagnetic Fileds Generated by Ocean Waves[J]. Journal of Geophysical Research, 1975, 80(21): 67.
[8] 付进. 长基线定位信号处理若干关键技术研究[D]. 哈尔滨: 哈尔滨工程大学, 2007.
[9] 王先华. 长基线水下导航定位系统测阵校阵及系统集成[D]. 哈尔滨: 哈尔滨工程大学, 2004.
[10] 江南. 长基线水下目标定位新技术研究[J]. 仪器仪表学报, 2004, 25(4): 77—78.
[11] NEHORAI A. Acoustic Vector-sensor Array Processing [J]. IEEE Transactions on Signal Processing, 1994, 42(9): 2481—2491.
Characteristics of Underwater Electric Field Based on Long-base Line Measurement
MO Li-xin1, JIAO Da-wen2
(1.Naval Agent¢s Room in No.426 Shipyard, Dalian 116005, China; 2.Dalian Scientific Test and Control Technology Institute, Dalian 116013, China)
Objective To research spatial distribution of electric field in marine environment. Methods Certain spatial gain was supplied based on the long-base line measurement system to increase the strength of measurement signal and measure the variation of amplitude of different measurement bodies in low-frequency electric field and the probability density distribution of 0.1, 0.2, 0.5, 1 and 10 Hz canonical frequency points in 24 hours. Results The spatial distribution of underwater electric field was various due to the different electrode separation, but the overall change tendency was almost the same. The contributions to the whole from frequency points 0.1, 0.2, 0.5 and 1 Hz decreased with the increase of frequency, while the rule of amplitude variation at 10 Hz was not apparent. In the 24 hours of continuous observation, the DC-1 Hz amplitude distribution of extremely low frequency electric field didn’t comply with normal distribution, but presented regularity with time change. Conclusion The spatial distribution characters of underwater electric field in ocean environment are obtained.
underwater electric field of ocean environment; typical frequency point; distribution of probability density; long-base line measurement
10.7643/ issn.1672-9242.2017.05.008
TJ01
A
1672-9242(2017)05-0036-07
2016-12-07;
2016-12-19
莫立新(1964—),男,山东诸城人,硕士,高级工程师,主要研究方向为舰船总体设计。