基于稀疏三维散点的地下巷道可视化重建方案①
2017-06-07张立昊张士文
张立昊,张 峰,张士文
(上海交通大学 电子信息与电气工程学院,上海 200240)
基于稀疏三维散点的地下巷道可视化重建方案①
张立昊,张 峰,张士文
(上海交通大学 电子信息与电气工程学院,上海 200240)
为了对地下巷道进行三维可视化重建,提出了一种基于稀疏三维散点的巷道可视化方案.根据地下巷道的形状规律,建立了梯形断面巷道的三维数学模型,将巷道分为多段,根据稀疏的三维散点得到每段巷道的中心线位置、长度数据和断面顶点,画出每段巷道的各个面,以完成整条巷道的重建.实验验证表明,该方法可视化巷道所需要的三维点数量很少,且有一定抗噪性,稳定性.
可视化重建;巷道;三维模型;稀疏散点;抗噪性
为了实现地下巷道掘进过程中的无人化,需要在掘进机工作时实时采集巷道三维空间点,并通过这些点对巷道进行三维可视化显示.目前国内对于巷道三维可视化的研究主要集中在通过测量得到数据建立模型,用断面及中心线描述巷道,并优化[1-5].徐雪战等人对于巷道的交叉点以及一些特殊地形进行了建模分析[6,7],孙臣良等人做了渲染以增强巷道的视觉效果[8].李虎等人使用VR等技术进一步增强了巷道的视觉效果[9-11].杜志强提等人出使用激光扫描获取巷道散点,并用格网进行可视化重建拟合[12].但由于掘进机掘进过程中会产生大量粉尘,会对激光、超声波、雷达等传统方法的性能产生巨大影响.
以上文献对巷道建模进行了各种尝试,然而这些文献对于巷道的建模都是基于巷道挖掘完成后进行测量得到数据或是激光扫描得到数据进行建模,无法在掘进过程中进行建模.
本文将目光集中在巷道挖掘过程中,首次提出使用机器视觉所得到的稀疏散点建模,在掘进过程中为远程操作人员提供巷道相关信息,有助于推进地下掘进无人化的实现.
随着图像处理及相关技术的发展,空间三维点的位置坐标还可以通过机器视觉的方法来获取,即通过已标定的双目摄像头同步拍摄两张图像,寻找特征点并匹配,进而利用视差求出三维点的空间坐标[13].通过图像降噪以及复杂的特征点选取、匹配算法可以使寻找特征点及匹配的过程有很强的稳定性和抗噪性[14-16],适用于有粉尘的环境.但由于图片中特征点数量的有限性,通过机器视觉得到的三维点是比较稀疏的.
针对机器视觉所得到的稀疏三维点,通过建立数学模型,延续巷道中心线和断面形状描述巷道的方法[1-5],将巷道分为很多段,根据这些三维散点,求得每一段的最佳中心线及断面顶点,可以得到三维可视化重建图像.实验表明,这种方法在三维点较为稀疏时可视化效果良好,且有较好的抗噪性和稳定性.
1 巷道可视化重建方案
地下巷道可以通过巷道断面形状以及巷道中心线来描述,本文以梯形断面的巷道为例建立模型.掘进机行进的过程中可以用机器视觉的方法不断获取巷道内壁上的三维点,通过这些三维点求出许多段直线线段逼近巷道的中心线,并算出每一段巷道中心 线对应的梯形断面的顶点,根据这些顶点画出每一段梯形巷道的各个面,以完成可视化重建.
1.1 采集三维点
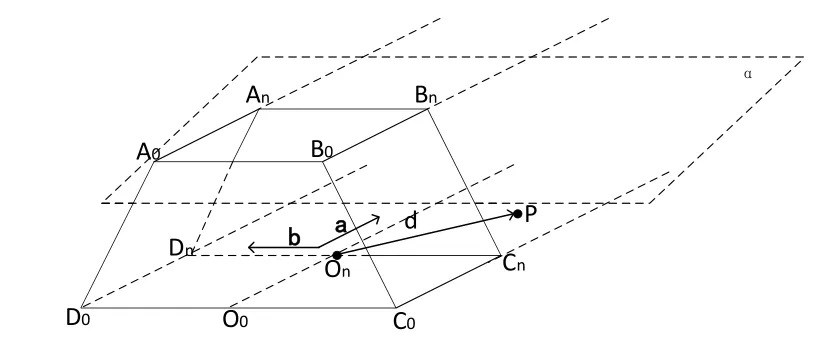
图1 寻找临近点
若P与地板或者顶板的z轴坐标值的差的绝对值小于阈值Dh,则相应判断P为地板或者顶板上的点.如果P不在地板或者顶板上,则计算若则P在左墙,反之,P在右墙.
1.2 最佳中心线法
最佳中心线法即通过穷尽所有可能的中心线朝向,从中选出能使模型最接近实际三维点的情况.最佳中心线法的关键在于求出最佳的中心线偏离角.中心线偏离角指的是下一段待重建巷道中心线与已重建巷道末端中心线方向的夹角.如图2所示,已重建巷道中心线在出口On处的延伸方向向量为a,下一段待重建巷道的中心线方向所有可能性由表示与a的夹角为q,q为正表示顺时针旋转,为负表示逆时针旋转.当时,q取最小值当时,取最大值当从变化到时, 待 重 建 巷 道的 模 型 由 六 面 体变 到步长为Dq.
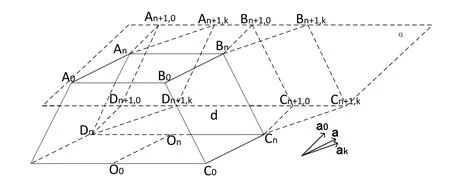
图2 待重建段巷道模型与中心线的关系
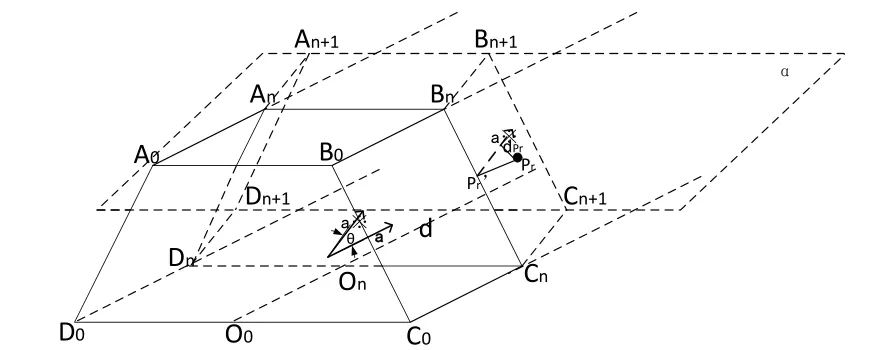
图3 临近点与巷道模型距离计算
1.3 中心线及断面顶点计算


根据图3的几何关系,用j+q替换以上两式的j可以得到:

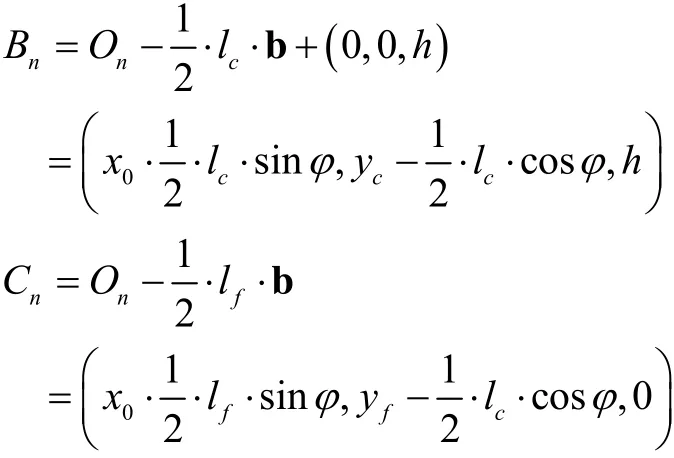
则点Bn和Cn坐标为:
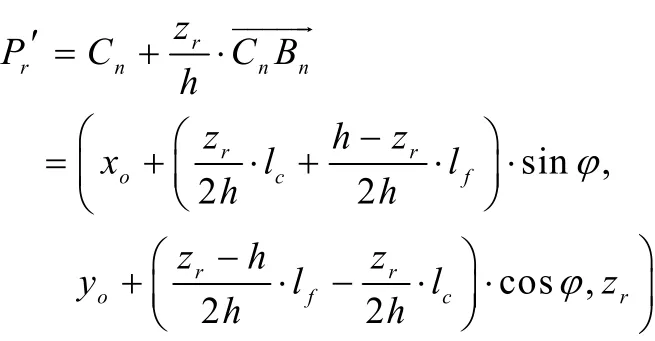
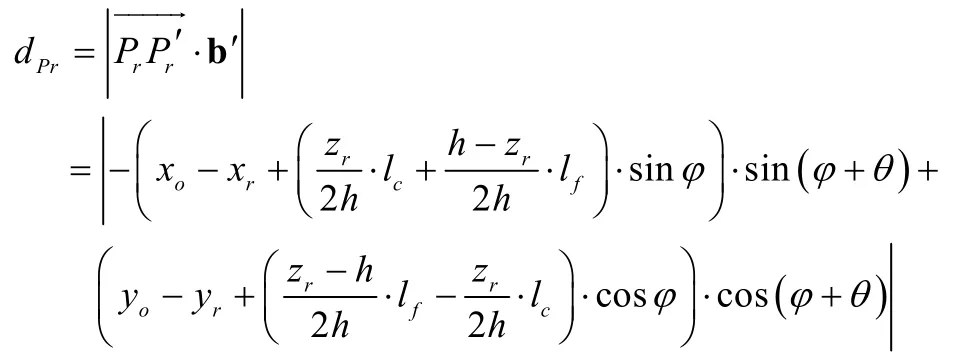
则 与巷道模型的距离为:
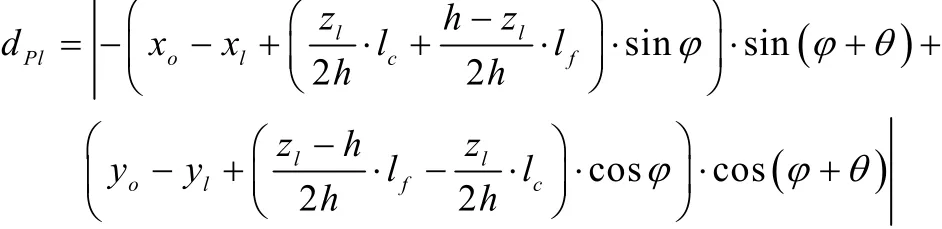
同同理可得,位于左墙上的临近点与巷道模型的距离为:
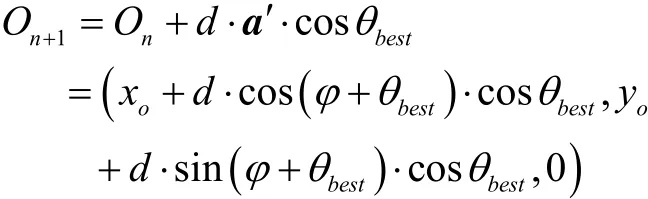
于是,可以求得在第n轮循环中巷道偏转的角度,令,可以求得:
2 实验验证与分析
2.1 巷道重建
使用MATLAB仿真得到重建所需要的巷道散点.如图4所示,创建弯曲程度不同的两条巷道进行重建,巷 道 的 中 心 线 分 别 满 足 函 数,的取值范围分别为巷道的顶板宽度为2,底板宽度为4,高度为6,用于重建的点的密度为每单位1的面积里面15个点,即15/1.如果视觉上精度要求为1分米,则当前密度相当于1平方分米内15个三维点,这已经远远低于激光扫描等方式得到的三维点的密度,接近于机器视觉可以得到的三维散点.初始值如下:
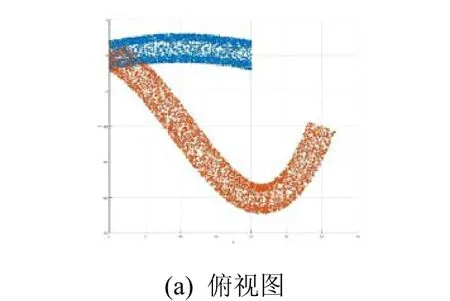
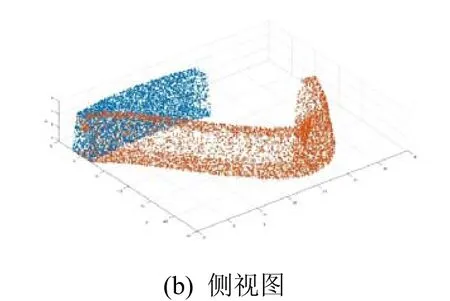
图4 巷道散点
根据第2节所描述的方法在Visual Studio中编写C++程序,算法流程如图5所示.
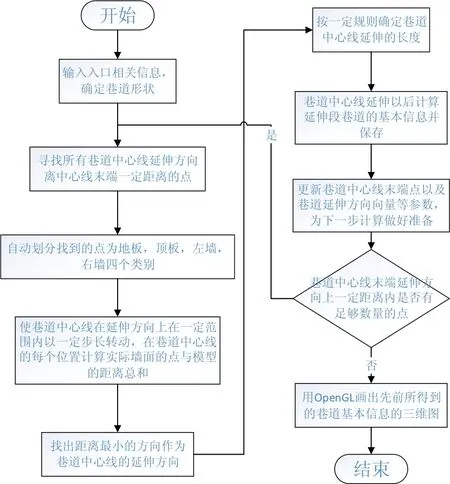
图5 算法流程图
将MATLAB仿真得到的点输入,运行算法,并用OpenGL显示,结果如图6所示,比较图6和图4可以看出两条隧道形状基本一致,表明重建成功.
我国主导建设的亚洲基础设施投资银行总部设在北京,到现在为止已有86个成员国,遍布五大洲,这对于亚洲各国基础设施建设完善,亚太区域经济一体化发展以及经济全球化发展都有着重要的意义。亚投行的存在为这类项目金额大、资金回收期长的基础设施建设项目带来了更多的融资渠道和机会,因此可以看出,我国债券市场也将随着亚投行的发展注入更多的活力,在对外投资、区域经济发展领域发挥自身的国际影响力,从而进一步推进人民币国际化进程,我国国际地位的提升以及世界多极化的发展。
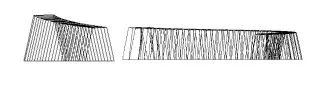
图6 巷道重建结果
2.2 方案性能量化评估
本节将引入巷道重建准确度参数t,并对不同稀疏度三维点重建能力以及抗噪性,稳定性进行测试.
2.2.1 巷道准确度参数t
通过重建得到的巷道中心线与实际巷道中心线的比较,可以衡量巷道重建的准确度.设重建得到的巷道中心线上点的坐标为集合:

其中,m为重建得到的巷道中心线上点的个数,则t的计算公式如下:
2.2.2 巷道抗噪性及低密度点性能测试
三维点的密度分为单位1面积内15个点和5个点两种情况,噪音强度分为没有噪音,每个三维点各个维度上增加幅值为的噪音以及每个三维点各个维度上增加幅值为的噪音三种情况,每种情况进行50次重新产生巷道三维点以及重建实验.通过准确度参数观察重建效果.
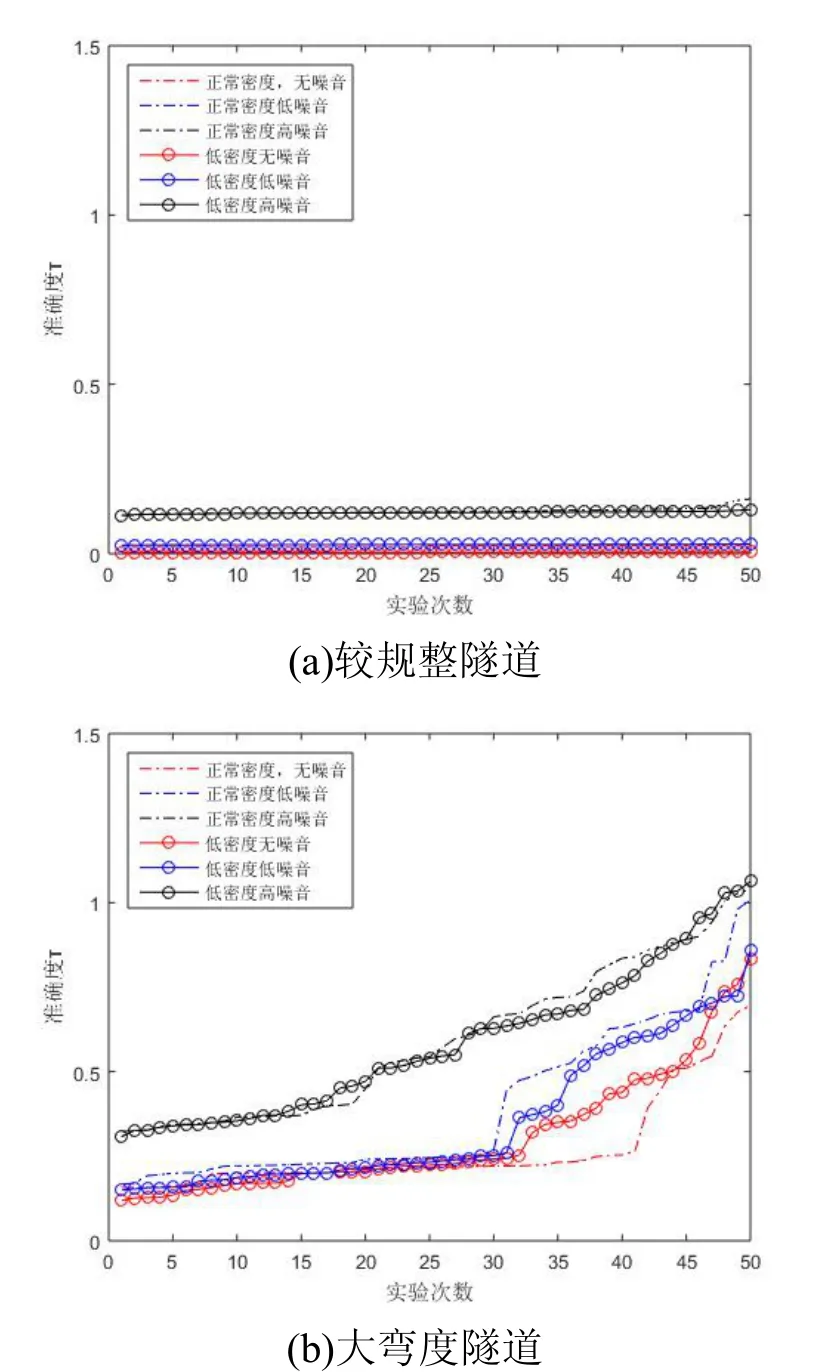
图7 隧道准确度评估
为了便于比较,已将每一轮50次实验结果的值进行升序排列,统一了图7(a)(b)坐标轴的范围.观察结果,可以得出如下结论:
① 降低三维散点密度对结果影响不大,模型对低密度的适应性很好.
② 低噪音对结果基本没有影响,而高噪音对中心线准确度会产生一定影响,但从图7(a)可以看出, 0.5的噪音造成的准确度变化仅为0.2不到,因此模型具有一定的抗噪作用.
③ 隧道的弯折程度对准确性会产生较大影响,大弯度下t值相对于小弯度明显上升,但依然只有极小部分超过1,模型具有较好的适应性.
④ (b)图的斜率明显大于(a)图,即较规整隧道中模型稳定性很好,但隧道弯度上升时,会对模型稳定性造成一定影响.
综合以上观点可以看出,算法对三维点的密度要求低,可以根据精度要求自行调节,比如要求重建精度为1分米时,则每平方分米仅需要5个三维点就可以得到较为满意的结果.同时,算法的具有一定的抗噪性,尤其对于低噪音抗性很强,但在隧道遇上非常大的弯道时,准确性及稳定性会有一定下降,综合来说仍然具有不错的实用性.
3 结语
本文首次提出了一种基于稀疏三维散点的巷道可视化方案.该方案用巷道中心线和断面形状来描述巷道,基于稀疏的三维散点寻找最佳中心线,并求得每一段断面顶点,画出每一段的各个面,完成整条隧道的重建.该方案可以运用到掘进机挖掘过程中三维可视化模型的重建,推进无人化的实现.
通过实验验证和分析,表明本文所提出的新的可视化方案能够成功重建整条巷道,并且对三维点的密度要求低,具有不错的抗噪性和稳定性.
本文仅以梯形断面为例进行了可视化重建和实验验证分析.对于不同巷道断面形状的应用是未来的研究方向.
1许军,罗鸷,刘晓明.三维井巷工程建模及可视化技术研究.采矿技术,2010,10(2):77–78,96.
2魏占营,王宝山,李青元.地下巷道的三维建模及C++实现.武汉大学学报(信息科学版),2005,30(7):650–653.
3王宝山,魏占营.煤矿虚拟环境的巷道3维建模研究.测绘学院学报,2005,22(3):204–206,211.
4徐海,罗周全,刘晓明.复杂巷道工程三维可视化建模方法研究及应用.矿冶工程,2011,31(1):19–23.
5谢义林,汪云甲,姚连璧.巷道三维构模及虚拟交互研究.计算机工程与应用,2009,45(23):231–235.
6徐雪战,孟祥瑞,赵光明.三维可视化技术在巷道开拓中的应用.煤矿安全,2014,45(5):106–108.
7张思卿,谭同德.VR技术在钨矿山巷道可视化研究中的应用.有色金属(矿山部分),2014,66(4):91–95.
8孙臣良,宛洪顺,侯旭江.基于OpengL的面向对象的巷道三维可视化.微计算机信息,2011,(5):213–215.
9李虎,李鹏飞,俞家勇.巷道三维建模与可视化研究.测绘与空间地理信息,2015,(10):168–170.
10张思卿,周天宏,谭同德,于慧影.OpenGL在矿井巷道可视化研究中的应用.金属矿山,2014,43(6):118–122.
11孙冉.数字矿山巷道三维可视化模块设计与开发.黑龙江工程学院学报,2015,(6):10–14.
12杜志强,石强,董兆江,桂佩华,李景星.基于地面激光扫描的矿山三维建模关键技术.地理空间信息,2013,11(6):23–26,8.
13 Hartley RI,Sturm P.Triangulation.Computer Vision and Image Understanding,1997,68(2):146–157.
14 Bay H,Ess A,Tuytelaars T,et al.Speeded-up robust features (SURF).Computer Vision and Image Understanding,2008, 110(3):346–359.
15陈红,吴成东,陈东岳,卢紫微.基于投票策略的特征点提取.东北大学学报(自然科学版),2016,37(2):157–160,164.
16陈爱华,朱明,王艳华,薛陈.基于方向角的特征配准算法.光电子.激光,2009,(4):521–524.
Underground Tunnel Visualization Solution Based on Sparse Three-Dimensional Points
ZHANG Li-Hao,ZHANG Feng,ZHANG Shi-Wen
(School of Electronic Information and Electrical Engineering,Shanghai Jiaotong University,Shanghai 200240,China)
In order to carry out 3D visualization reconstruction of underground tunnel,this paper presents a new method based on sparse 3D scattered points.According to the shape of the underground tunnel,a three-dimension mathematic model of tunnels with trapezium section is built up.Dividing the tunnel into segments,according to the sparse 3D scattered points to get the central position,length data and the vertexes of the tunnel’s each segment,we can draw every surface of each segment,so as to reconstruct the whole tunnel.As is proved by experiments,this method needs only a small amount of three-dimension points,and has noise immunity and stability.
visualizing reconstruction;tunnel;three-dimension model;sparse scatters;anti-noise
国家重点基础研究发展计划(973)(2014CB046306)
2016-08-08;收到修改稿时间:2016-10-10
10.15888/j.cnki.csa.005760
