基于北斗定位系统的虾塘投饵管控系统的设计和实现
2017-06-05张丽珍杨加庆邵祺杨朦朦胡庆松张乐
张丽珍,杨加庆,邵祺,杨朦朦,胡庆松,张乐
(1.上海海洋大学 工程学院,上海 201306;2.北斗天汇上海科技有限公司,上海 201306)
基于北斗定位系统的虾塘投饵管控系统的设计和实现
张丽珍1,杨加庆1,邵祺1,杨朦朦1,胡庆松1,张乐2
(1.上海海洋大学 工程学院,上海 201306;2.北斗天汇上海科技有限公司,上海 201306)
水质长期实时监控对于水产养殖具有极其重要的作用,为此设计了一套基于北斗卫星定位系统的移动式水质监测系统,根据虾塘养殖特点有针对性地选取了需要检测的溶解氧、PH值、温度、电导率等水质参数进行实时在线检测。通过数据采集模块获取虾塘实时水质参数信息,再经专家系统智能判断虾塘水质动态,科学进行水质管理、饲料投喂以及科学养殖等。
虾塘;水质监测;BDS;专家系统
0 引 言
中国是水产养殖业大国,近年来随着农业结构的调整,我国水产养殖业正从传统的人工养殖逐步向工业化集约化养殖方式转变,水质监控成为集约化养殖的关键环节。由于集约化水产养殖密度大,当出现水质问题时,往往已经造成了无可挽回的经济损失,故水质因素成为集约化水产养殖中最为关键的一环。传统的人工采样法无法实现实时监控,不能获取水质动态数据,以自动化、智能化和网络化为核心内容的工业化养殖成为必然趋势[1]。近年来,世界各国纷纷加大研究力度,运用自动控制技术、化学分析技术、以及计算机测控技术等先进手段来发展水环境监控,旨在建立一个以水质环境参数综合指标为基础的在线监控系统。
其中,投饵船导航、定位是至关重要的一部分,如何及时有效和实时的定位是当前船载导航的迫切要求。由于养殖水质会发生极端或者无法预测的情况,这对传统的水质监测提出了更高的要求。北斗导航系统以其特有的短报文通信功能在船载导航领域有其得天独厚的优势,采用以北斗导航系统为核心的船载导航系统,同时增添实时显示、紧急报警、SD卡存储等应用功能[2]。
本文开发基于北斗卫星定位系统(BDS)的移动式水质监控装置,进行溶氧、PH值、温度、电导率和盐度五个水质参数以及空气温湿度和风向、风力的实时在线检测,并通过专家系统实现水质的在线评估并给出改善当前水质的措施,减少因水质问题带来的损失[3]。
1 系统体系结构设计
本系统是一款基于北斗定位的水质监测系统,结合了卫星导航技术、地理信息技术以及GPRS无线通讯技术,实现了对于水质的实时监测和有效管理,系统终端需要完成的功能如下:
1) 北斗定位:通过卫星接收机,接收卫星导航信号,获取船只的位置、速度、时间等相关信息;
2) 数据处理:一方面,对接收到导航信号进行处理,提取出卫星的定位信息,按照特定通信协议对提取出的定位信息进行封装;另一方面,解析来自远程监控中心发送的控制命令;
3) 远程通信:利用移动数字网络与远程监控中心进行数据交换;
4) 船载控制:根据远程监控中心发送的控制命令,完成对船只的控制操作。
系统的总体结构图如图1所示。
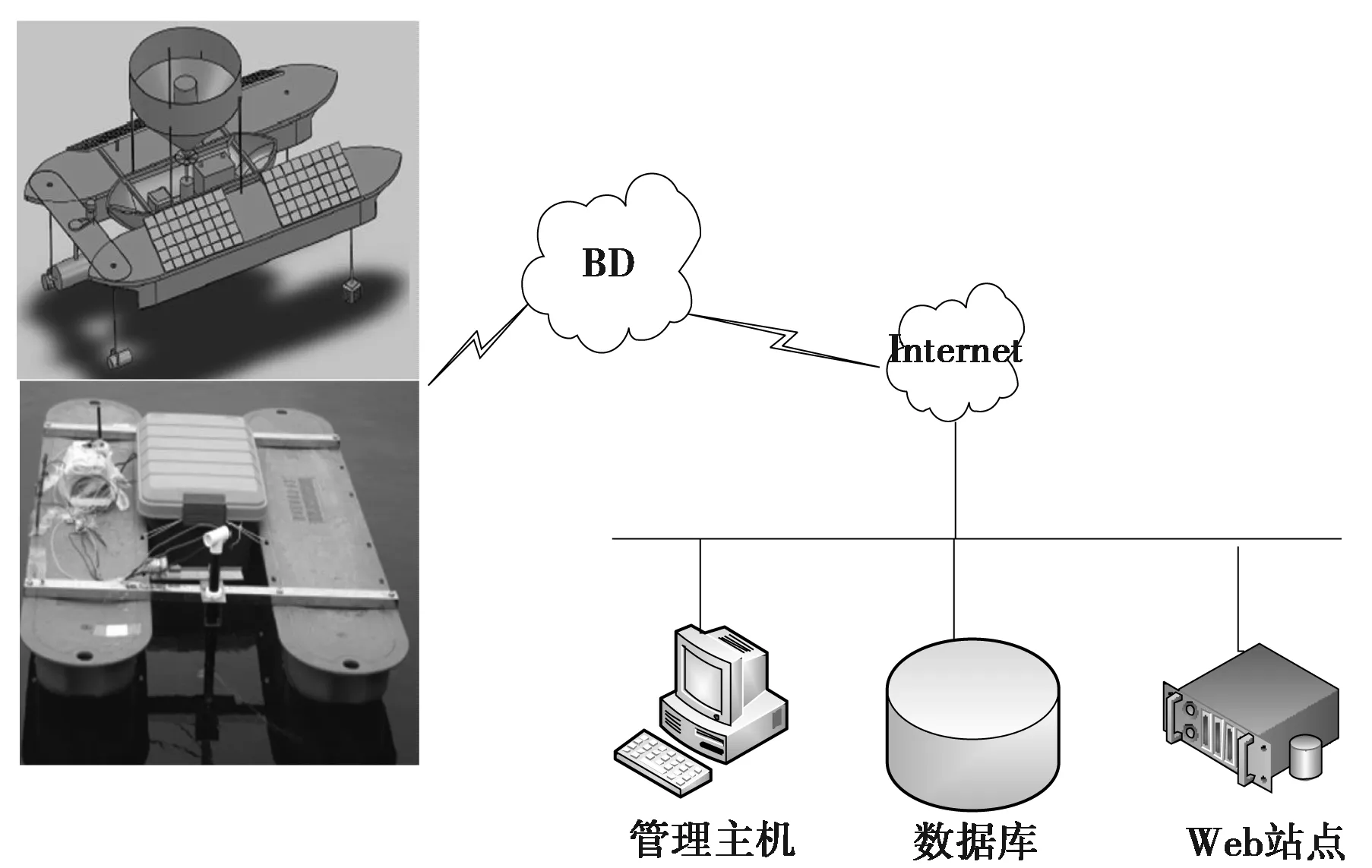
图1 系统结构示意图
监控系统的设计包括了终端设计和监控中心设计。系统终端主要由卫星接收模块、控制模块和通信模块组成,负责接收和处理卫星的定位信息,并将定位信息发送到远程服务器上,同时接收和响应远程服务器发送的控制命令;监控中心由远程服务器、数据库、监控客户端三部分组成,负责完成对系统终端数据的接收、存储、显示,同时实现对监控终端的远程控制。
在每辆监控船只上安装监测终端,通过监测终端的卫星接收机接收北斗卫星信号;控制芯片从接收到的卫星信号中解算出经纬度、行驶方向、行驶速度等;根据监测终端与监控中心的通信协议将数据进行封装;封装好的数据通过模块被传送到监控中心,远程服务器对数据进行接收、解析;解析后的定位信息被存储到监控中心的数据库中;监控客户端通过对数据库中数据的读取、显示,实现系统的定位功能,当用户向目标船只下达控制命令时,监控客户端向远程服务器发送数据库操作请求;服务器获取客户端的请求后,将客户端发送的命令信息保存到数据库中,同时更新系统的控制命令标志位;远程服务器定时对控制命令标志位的值进行检查,当发现标志位发生改变后,将从数据库中读取更新的命令信息,并根据通信协议将命令信息进行封装后发送到监控终端。
2 系统监测点硬件设计
监测点的设计是投饵管控系统设计的关键环节之一,由数据采集模块、数据处理模块、无线通讯模块和电源模块和一些基础电路组成,如图2所示。其中,数据采集模块主要由传感器、A/D转换器及辅助电路(放大、调理)等组成,它主要负责感知、获取监测区域内的信息,并将其转换为数字信号。
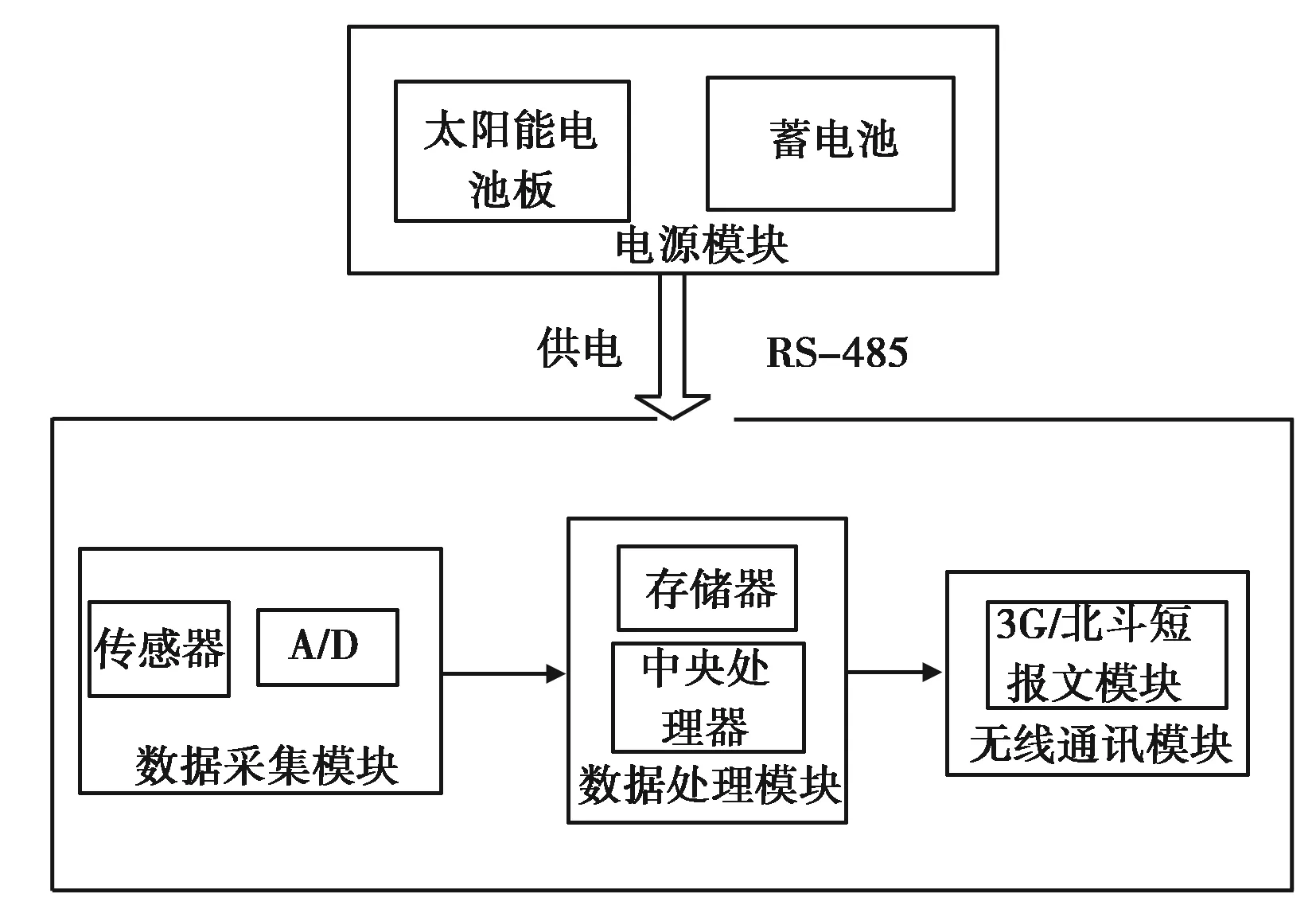
图2 监测点硬件系统的组成
设计数据采集模块的首要工作就是选择合适的传感器,而在选择传感器前首先需确定要监测的环境参数,环境参数主要由虾类的生长环境和生长发育因素决定,本文选择较为重要的水温、PH、溶解氧和盐度作为监测对象,同时本文还加入对空气参数的监测,如温度,风向、风力等。
数据处理模块主要负责数据处理、数据存储、电池用量的监测、系统任务的调度以及执行通信协议等,主要由存储器和中央处理器组成。
无线通讯模块由3G和北斗短报文通讯块组成,实现和上位机平台的数据收发。3G网络具有响应时间短、传输速度快和信号在雨、雾等恶劣天气下衰减等优点,同时3G网络无需布线覆盖范围广、灵活性强,特别适用于大范围水产养殖的自然环境中[5],所以本文选择3G网络实现无线通讯。“北斗短报文”是北斗卫星导航系统的一个独特的功能,是指卫星定位终端、北斗卫星和北斗地面服务站之间可以直接进行双向信息传输通过卫星信号,不依赖于通信网络[6],本文选用上海北斗有限公司推出的MN-110模块实现定位功能,MN-110模块是可支持BD2 B1/GPS L1频点的差分双模导航定位模块,内置伪距差分算法,支持北斗地基增强服务,支持原始观测量输出,为车载、船载和便携式手持等导航定位终端产品提供了高灵敏度、低功耗、低成本的差分双模解决方案,可支持休眠工作模式,支持模块升级等功能。
该模块主要由核心处理器、编码器、DSP、调制解调器、用户接口五部分组成,完成发送和接收两部分的内容。一方面,将需要发送的北斗一代报文信息通过串口接收后,编码后发送给射频信号;另一方面,将接收到的北斗短报文信息,通过数字信号处理器和调制解调器解码成能识别的短报文数据,再通过用户接口传输于用户终端设备。
电源模块采用铅酸蓄电池蓄电,太阳能电池板发电的方式来保证可靠供电。
3 系统软件设计
本文采用数据存储、逻辑处理和数据显示相分离的设计模式,将系统分为数据存储层、数据访问层、业务逻辑层和表示层四个层次[7],有利于系统的开发、维护、部署和扩展,其软件架构设计如图3所示。
在系统软件架构中,表示层主要通过Web浏览器将处理过的数据以图标的形式展现给用户,同时用户也可以通过上位机发布指令远程控制外设,达到对水质的调控作用以及实现自动投饵等功能;业务逻辑层通过对实时数据和历史数据等信息进行综合分析和处理,返回用户请求或者执行相应控制,同时还可以实现水质参数的实时显示、查询、水质优化等功能[8];数据访问层采用ODBC等方式访问水产养殖和气象等数据库,是业务逻辑层与数据存储层的桥梁;数据存储层主要用于存储实时采集的水产养殖生态环境数据等,是整个系统的数据基础。领域专家可通过系统维护界面,完成对知识库的知识增加、删除、修改等工作,实现系统知识的获取与更新。
为便于用户观察、使用,监测系统上传的数据需要通过终端界面显示出来。终端监控软件的设计是对整个系统的工作结果的后处理,软件的设计需兼顾易操作、界面友好、数据实时显示、数据查询以及数据自动处理等功能。系统软件总体功能模块如图4所示。
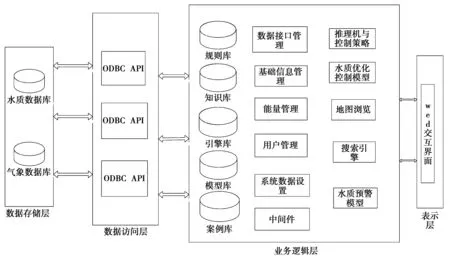
图3 系统软件架构图
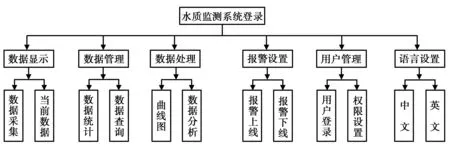
图4 系统功能结构框图
主要功能模块描述如下:
1) 数据显示: 用户可直接观察到当前的水质参数;
2) 数据管理: 直接访问数据库查看历史数据,并有数据查询功能;
3) 数据处理: 根据用户需要用坐标图显示一段时间内水质的变化情况,并计算出这段时间内的最值和平均值;
4) 报警设置: 设定了水质参数的上下限,当监测到的数据达到上下限时系统会及时警告用户并存储事件;
5) 用户管理:修改用户信息以及添加用户;
6) 语言设置: 系统使用双语言,用户可按照需要在中文和英文间切换。
4 系统功能实现
4.1 系统功能要求
虾塘智能投饵及管控系统上位机软件平台的主要目的是允许养殖户通过管控平台随时随地、实时可靠地获取当前的水质状态以及实现自动巡航的功能。该应用通过实现水质数据上传、显示和数据输出,实现了巡航路线输入功能。
远程服务器需要完成如下功能:
1) 数据存储:将接收到的定位信息和控制命令存储到数据库中;
2) 数据库管理:执行对数据库中数据的插入、删除、查询、更新等操作;
3) 数据处理:对接收到的定位信息进行数据的解析和提取;
4) 数据通信:接收和发送系统终端和监控中心之间的通信数据。
监控客户端的功能需求:
1) 地图显示:能够在客户端载入电子地图,实现地图缩放、漫游等基本功能;
2) 实时监控:在电子地图上实时显示船只行驶状态,如位置、速度、方向等;能够控制船只的行驶方向及速度等;
3) 数据管理:能够有效对投饵信息、水质信息等进行管理;
4) 报警提醒:当水质出现超出上下限或者变化异常等危险状况时,客户端会在地图上向监控人员进行报警提醒;
5) 远程控制:客户端可以向监控船只下达控制命令,完成对目标船只的控制操作。
4.2 系统运行与分析
虾塘投饵管控平台界面包括进入系统和系统配置两个功能,其中系统配置主要用作相关用户查看系统相关配置以作学习研究,而点击进入系统后则是本系统的核心部分。其界面如图5(a)所示,其中菜单栏第一项的功能是数据实时查看,可查看投饵船的实时位置、实时上传的水质数据。菜单栏第二项为数据查询统计,可根据时间段查询水质数据,并生成统计图表如图5(b)所示。
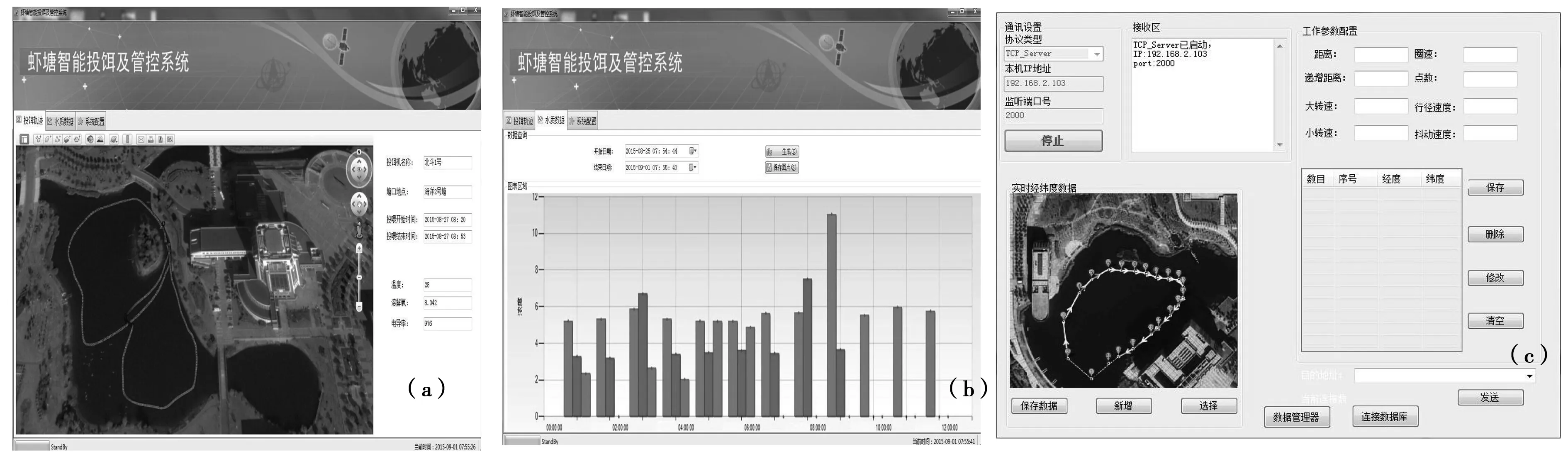
图5 数据展示功能 (a) 实时查看界面; (b)查询统计界面;(c)路径规划功能
菜单栏最后一项为系统的路径规划功能界面,用户可在地图控件上标选路径点,发送给投饵船作为行进路线,如图6所示。
经测试,系统运行情况已满足设计的功能要求并能稳定运行。
5 结束语
本文设计并实现了基于北斗精确定位的移动投饵管控系统,整个系统分为用户终端,地面增强网络系统以及无线通信系统、系统后台几个部分。系统对数据的接收、发送、处理、管理、存储和显示等功能,整个系统能够有效地进行一定精度的定位。用户可通过管控平台随时随地、实时可靠地获取当前的水质状态以及实现自动巡航的功能,贴合养殖用户的实际使用情况,实现科学管理。
[1] 唐荣,邹海生,汤涛林,等. 自动投饲船及其测控系统的设计与开发[J]. 渔业现代化,2013,40(6):30-35.
[2] 徐皓,张建华,丁建乐,等. 国内外渔业装备与工程技术研究进展综述[J]. 渔业现代化,2010,37(2):1-8.
[3] 韩世成. 池塘投饵机自动控制系统[J]. 水产学杂志,2002,15(2):65-68.
[4] 李朝青.单片机原理及接口技术[M].北京:北京航天航空大学出版,2005.
[5] 袁媛,袁永明,贺艳辉,等.罗非鱼不同池塘养殖模式生产成本及经济效益分析[J].江 苏 农 业 科 学,2013(8):217-219.
[6] 葛一健. 我国投饲机产品的发展与现状分析[J].渔业现代,2010,38(4):63-65.
[7] 邓素芳,杨有泉,陈敏. 全自动饵料精量投喂装置的研究[J].农机化研究,2010(11):103-105.
[8] 卢肇英.传感器及其应用.[M].北京:中国铁道出版社,1984.
Design of Management and Control System of Feeding in Shrimp Farming Based on BDS
ZHANG Lizhen1,YANG Jiaqing1,SHAO Qi1,YANG Mengmeng1, HU Qingsong1,ZHANG Le2
(1.CollegeofEngineeringScience&Technology,ShanghaiOceanUniversity,Shanghai201306,China;2.ShanghaiBeidouSkyTechnologyCo.Ltd,Shanghai201306,China)
Real-time monitoring for long time has an important role on aquaculture water quality, shrimp farming is developed based on the BDS of mobile intelligent feeding system in this paper, According to the characteristics of shrimp farming,we select dissolved oxygen, PH, temperature, electrical conductivity for real-time online detection of water quality parameters. Through the data acquisition part of the water quality parameters of HaTang real-time information, then through the control parameters in the process of expert system of intelligent judgment bait casting, achieve precise and effective feeding.
Shrimp farming; water monitoring; BDS; expert system
10.13442/j.gnss.1008-9268.2017.02.019
2016-10-10
上海市科技创新行动计划(编号:14111103900); 上海市虾类产业技术体系建设(沪农科产字(2014)第5号)
P228.4
A
1008-9268(2017)02-0083-05
张丽珍 (1967-),女,博士,教授,主要从事CAD/CAM、海洋装备和渔业机械方面的教学和科研工作。
杨加庆 (1992-),女,硕士生,研究方向为虾塘投饵管控平台的设计。
邵祺 (1992-),男,硕士生,研究方向为人机方向。
杨朦朦 (1989-),男,硕士生,主要从事投饵装备的研究设计。
胡庆松 (1979-),男,博士,教授,主要研究方向为海洋工程装备、鱼类结构功能仿生。
联系人: 杨加庆E-mail:956704910@qq.com
