基于矢量跟踪的GNSS/SINS相干深组合系统研究
2017-06-05蔡南荆郭承军
蔡南荆,郭承军
(电子科技大学,电子科学技术研究院,四川 成都 611731)
基于矢量跟踪的GNSS/SINS相干深组合系统研究
蔡南荆,郭承军
(电子科技大学,电子科学技术研究院,四川 成都 611731)
为满足组合导航系统在高动态环境下的性能要求,设计基于矢量跟踪的GNSS/SINS相干深组合导航方法。利用矢量跟踪环路将所有可视卫星的跟踪和导航解算融为一体,增强通道间的辅助;高动态对载波跟踪影响更大,在通道预滤波中将码环载波环分别用独立的滤波器处理,组合滤波中采用通道间差分降低滤波状态维数,提高计算效率。引入惯导的加速度辅助本地信号参数预测,较精确地测量卫星视线方向的加速度,减小接收机在高动态时段的剩余动态,提高本地信号参数的预测精度。基于矢量跟踪软件接收机搭建相干深组合仿真系统,实验表明该方法在高动态等环境下能提高信号跟踪性能,改善系统的精度、可靠性。
组合导航;矢量跟踪;相干深组合;高动态
0 引 言
全球导航卫星系统(GNSS)和捷联惯性导航系统(SINS)是现阶段航空航海等领域主要的导航系统[1],它们有各自的优点和不足,二者结合起来,可以发挥各自的长处,实现优势并存缺陷互补,改善系统的综合性能。
按照组合结构及信息处理方式的不同,可将GNSS/SINS组合系统分为松组合、紧组合、深组合三种模式[2-3]。过去几十年,GNSS与SINS的组合以松组合、紧组合为主,在松组合中GNSS提供的量测信息是位置和速度,紧组合提供伪距和伪距率,它们都是用组合滤波器融合GNSS和SINS的量测信息给出定位结果,并对SINS进行校正,GNSS性能没有得到提高,因此在高动态等环境下通常难以稳定工作。 近年来成为研究热点的深组合模式不仅用组合滤波结果校正SINS,还利用SINS的解算结果辅助GNSS的捕获跟踪过程,大大提高了组合系统的导航精度和可靠性[4-5]。深组合模式目前尚无明确的定义,按照基带I/Q信号是否直接用于组合滤波可将GNSS/SINS深组合分为相干和非相干两类[6-7]。相干深组合是把GNSS接收机相关器输出的I/Q信号作为组合滤波器的量测输入,而非相干深组合使I/Q信号先通过码环和载波环鉴别器,前者可以避免在Kalman滤波的量测输入中引入未模型化的非线性误差,跟踪环路的噪声小,具有更好的载波相位跟踪能力,适合高精度应用需求[8-9]。 相干深组合又可分为集中式和分布式,前者只用一个导航滤波器,量测矢量是通道数的6倍,且要求滤波更新速率很高,计算负荷很大,因此工程实际采用分布式组合来实现[10]。
本文为提高接收机在高动态环境中的导航性能,研究了一种基于矢量跟踪软件接收机的相干深组合系统。
1 矢量跟踪相干深组合系统方案设计
传统的GNSS接收机通常采用标量跟踪的结构形式,基带数字信号处理部分为多个并行的信号通道,分别对不同的可见卫星进行捕获、跟踪、位同步、帧同步、导航电文提取,各通道间相互独立,最后由导航解算模块将各个通道的卫星测量值和导航电文转化为导航解,给出用户状态估计。它在载体动态较低时能够正常工作,但在高动态环境中通常不能良好运行,难以保证导航精度和可靠性。为此本文设计一种基于矢量跟踪的相干深组合方案。GNSS/SINS相干深组合系统结构设计如图1所示,主要分为矢量跟踪、SINS解算、组合导航滤波三部分。 卫星数字信号首先经过GNSS矢量跟踪部分的基带相关器处理输出基带I/Q测量信息,再送入各个通道的预处理模块。预处理滤波分为两路,一个以码相位误差、载波跟踪误差作为状态量,以码和载波鉴别器输出为量测量,并将结果变换为伪距误差和伪距率误差输入组合导航滤波器,另一个以载波跟踪误差为状态量,以载波鉴别器的输出作为量测量,估计结果用于闭合载波环。组合滤波器以GNSS和SINS的量测为输入,估计出状态误差,并对SINS进行误差校正。校正后的SINS输出的位置速度加度信息用于对后一时间段内的码相位及载波频率进行计算,以闭合矢量跟踪环。
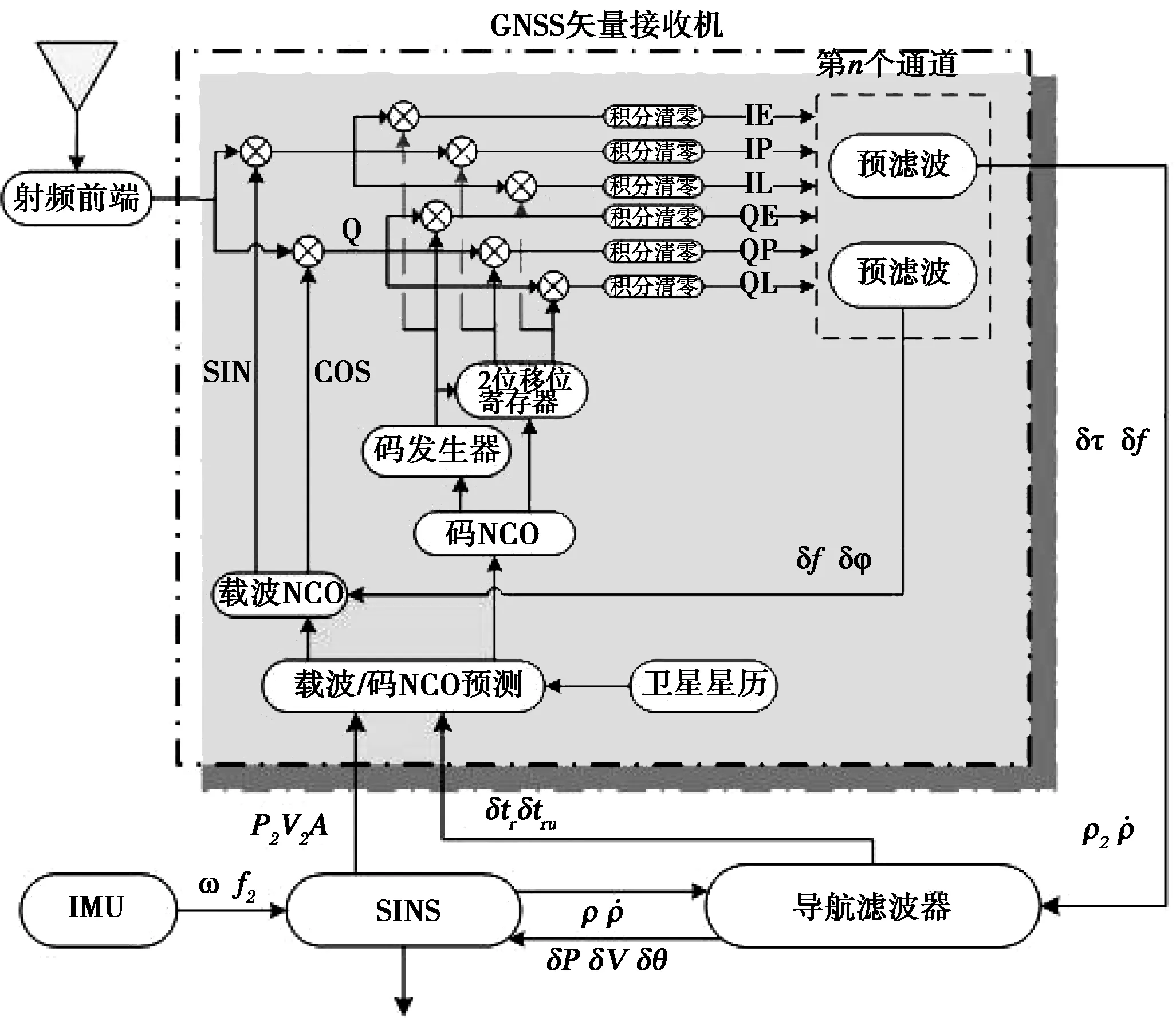
图1 基于矢量接收机的相干深组合系统结构
2 矢量跟踪相干深组合系统实现
2.1 矢量跟踪及预滤波模型
传统接收机的标量跟踪结构并非最优,矢量跟踪接收机将所有通道卫星的跟踪结合在一起,计算导航状态并生成控制信息,输入给每个卫星跟踪通道的本地信号产生模块,构成矢量跟踪环路,加强了通道间的辅助充分利用导航信息,有利于提升导航性能。单独的矢量跟踪接收机将所有跟踪通道联合在一起,若某个通道跟踪性能下降可能会影响到其它通道,导致导航可靠性降低。采用矢量跟踪的深组合接收机引入SINS的辅助更有利于发挥矢量跟踪的优势,提升导航的可靠性。
基于矢量跟踪相干深组合接收机中,基带信号处理模块的相关器输出的基带I、Q测量信号在预处理模块中转换为伪距残差伪距率残差,再以这个伪距残差、伪距率残差信息输入到组合滤波器中,估计位置、速度、姿态、惯性器件误差等各导航状态误差,并对SINS进行误差校正,得到组合导航位置、速度和姿态解,最后根据SINS的导航解、电离层估计、卫星位置速度和接收机时钟误差等估算出码/载波NCO控制量,闭合码/载波跟踪环路。
基带预处理滤波的量测量是相干积分结果,第i颗卫星信号与本地载波混频后得到相干积分结果为
(1)

预处理模块中码和载波频率滤波器的状态量取码跟踪误差、载波频率误差,将结果变换成伪距伪距率误差。为了方便这里省去卫星上标i,状态方程表示为
(2)
式中: 状态量X=[A,δφ,δf,δa,δτ]T;T为预检测积分时长;λL1,λCA为L1载波波长和CA码码长。量测方程设计为

(3)
载波相位滤波器的状态量取载波跟踪误差,量测量取载波鉴别器的输出,估计结果不送入组合滤波器,只用于闭合载波环。状态方程和设计为
(4)

2.2 组合滤波模型
组合导航滤波以各个通道滤波状态为量测输入,对系统状态误差进行计算和更新,导航误差状态量包括SINS的位置误差(纬度、经度、高度误差)、速度误差、加速度误差、姿态角误差、载体系中陀螺仪的三轴向漂移及加速度计的三轴向零偏。由于接收机是所有可见星所共视的,接收机的钟差钟漂变化率也是共用的,可用通道间的差分来消除,以降低组合滤波的维数减少计算负担。经过通道间差分处理后,组合滤波状态只包含SINS的状态误差和器件误差,状态量为
(5)
(6)
(7)
(8)
第i颗卫星和第k颗卫星(取载噪比高的通道)间作差分可得
δρik=δρi-δρk=(ei1-ek1)δx+(ei2-ek2)δy+
(9)
(10)
(11)
当共观测到n颗卫星时,由其余n-1颗卫星和第k颗基准卫星的测量值可得量测量为


量测矩阵H为
H1=LOS·C,H2=为大地坐标向ECEF坐标的转换阵为E、N、U坐标向ECEF坐标的转换阵。
2.3 码和载波预测方法
在存在较大加加速度的高动态环境中,基于SINS位置速度辅助的接收机与卫星之间的剩余动态很大,很容易导致导航精度恶化甚至跟踪环路失锁。为提高组合系统在高动态下的导航性能,本文考虑SINS的加速度辅助设计了本地信号参数预测方法,利用SINS直接测量的加速度、卫星星历求得的卫星的加速度辅助本地信号的生成。
组合滤波输出的状态误差参数对SINS进行误差校正后,由SINS测量的接收机位置速度加速度、卫星星历计算得到的卫星的位置速度加速度,共同计算下一时段内本地信号参数。基于惯导量测信息,载波及码的伪距伪距率伪距加速度估计为
ρcode=(pI-pS)·e+c(δtu-δts)+Δion+Δtrop,
(12)
(13)
(14)
ρcarr=(pI-pS)·e+c(δtu-δts)-Δion+Δtrop
(15)
(16)

(17)
其中:e为卫星视线方向单位矢量; Δion, Δtrop分别为电离层、对流层时延。
本地信号参数预测为
(18)
(19)
(20)

(21)
增加SINS加速度辅助后,可对接收机与卫星视线方向的加速度进行较精确地测量,可使接收机动态由其与卫星相对运动变为加速度辅助后的剩余误差动态,从而大大减小了接收机在高动态时段的剩余动态,提高了本地信号参数的预测精度及系统的导航性能。
3 实验分析
3.1 实验条件设置
利用导航信号模拟器生成GPS卫星信号,由中频信号采集器采样得到卫星中频信号,采样率取16.367 MHz,中频为4.13 MHz,矢量软件接收机环路积分时间为1 ms. SINS更新频率为200 Hz,即更新周期为5 ms.陀螺随机常值漂移为0.1o/h,一阶马尔柯夫相关时间Tg为300 s,高斯白噪声方差为0.01°/h,加速度计随机常值漂移为0.1 mg,一阶马尔柯夫相关时间Ta为300 s,高斯白噪声方差为0.01 mg.组合滤波器滤波频率为10 Hz。
模拟生成飞行器高动态飞行轨迹如下:在导航坐标系中,起点位置坐标为(34.230 0°E,108.357 6 °N,590.6 m),初始速度为(50 m/s,50 m/s,50 m/s),初始姿态为(0°,0°,0°)。先水平运动10 s,然后抬头飞至终点,模拟飞行轨迹时长50 s.飞行过程中最大加加速度为50 g/s,最大加速度为30 g,最大速度1 km/s,飞行轨迹如图2所示。
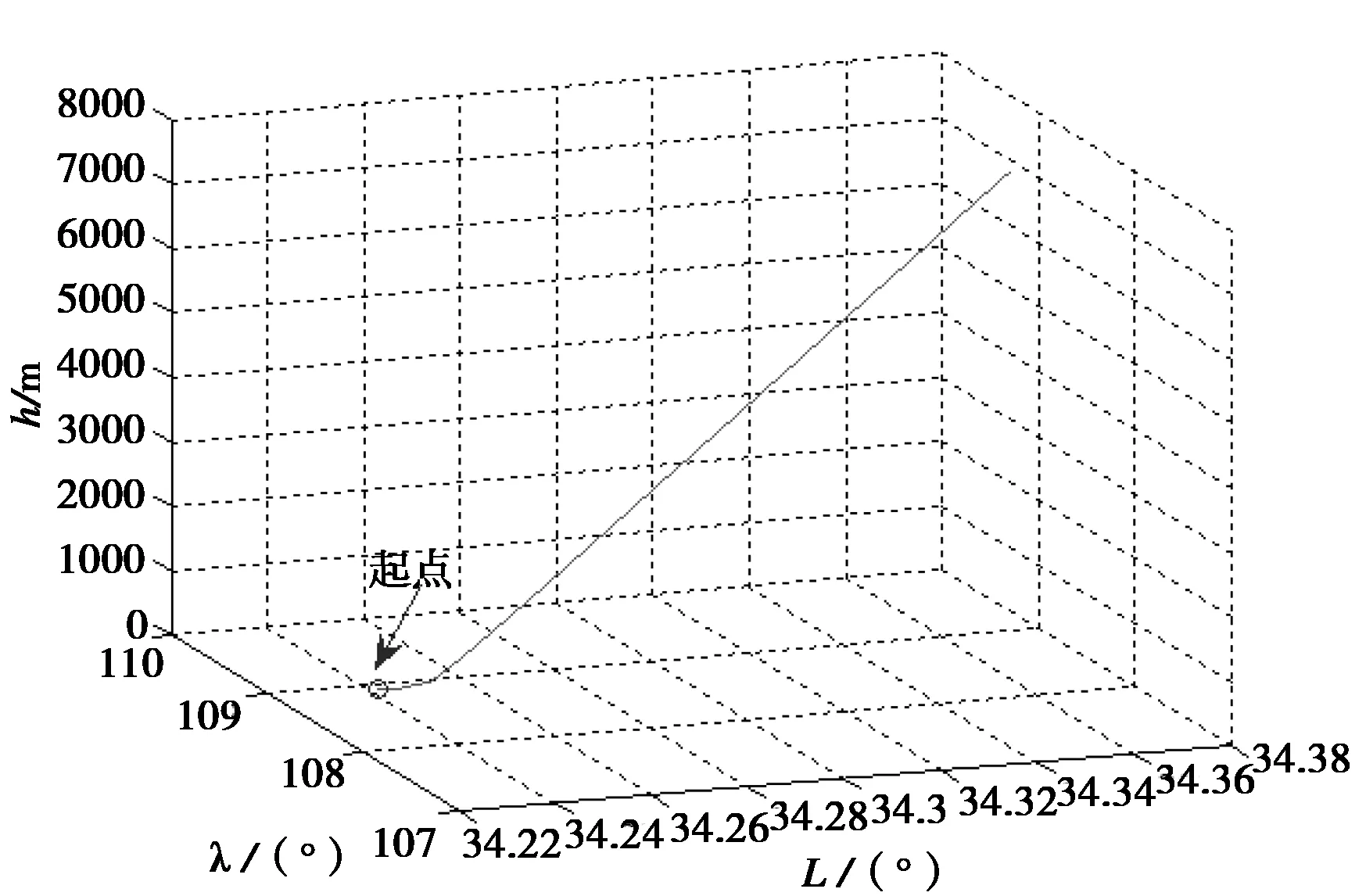
图2 载体运动轨迹
3.2 实验结果及分析
基于矢量跟踪的相干深组合系统组合定位结果误差结果如图3~图5所示。
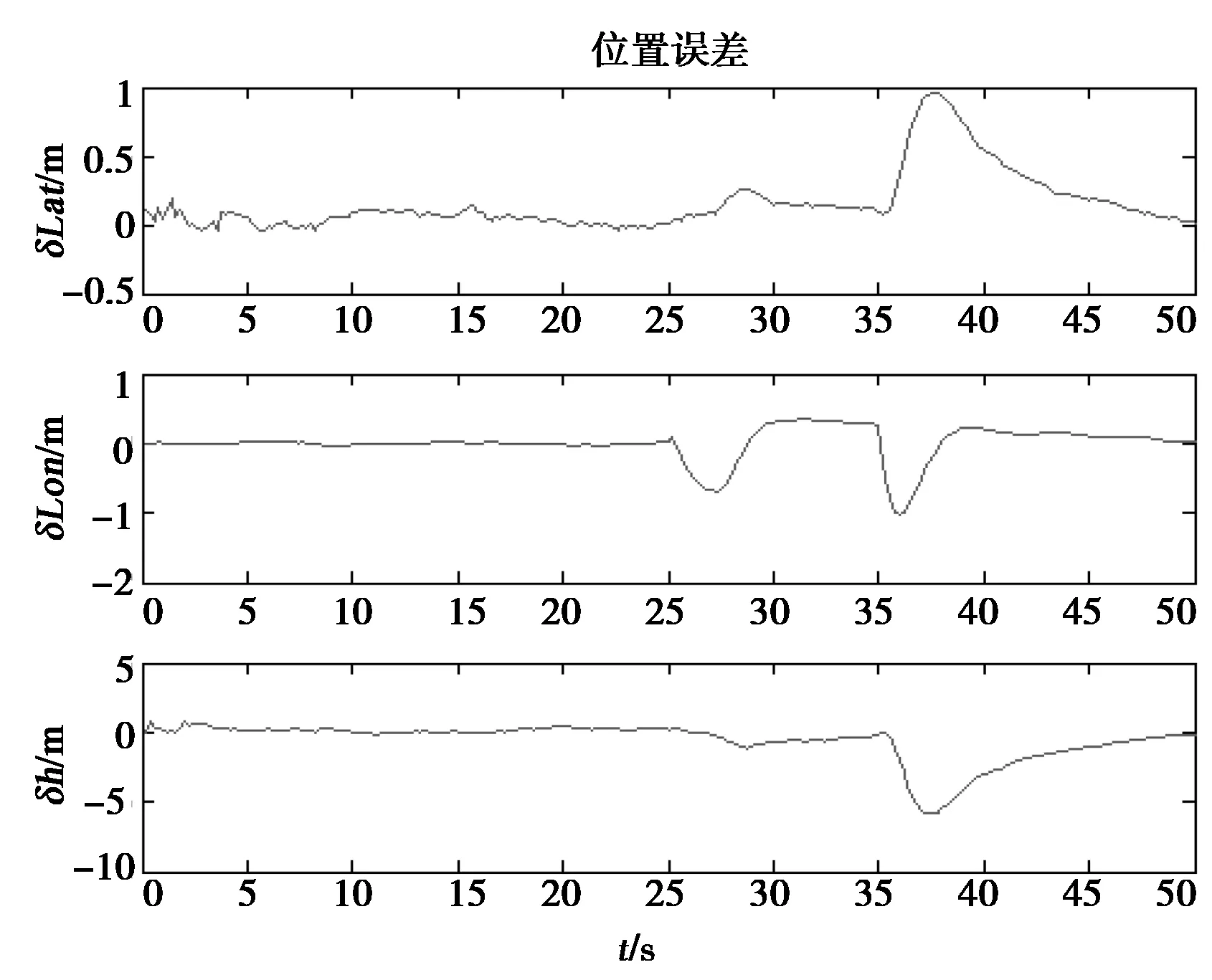
图3 导航位置误差图
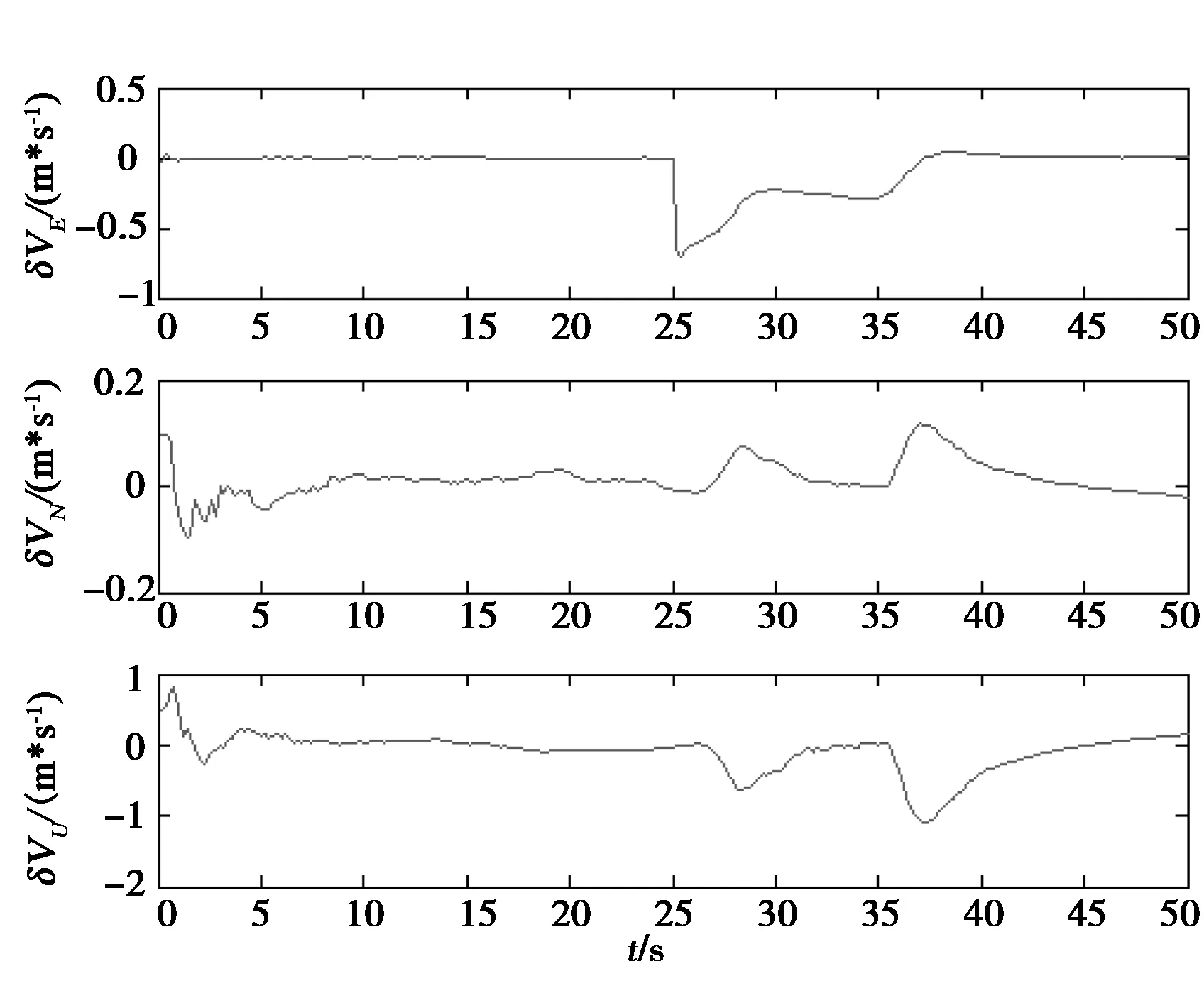
图4 导航速度误差图
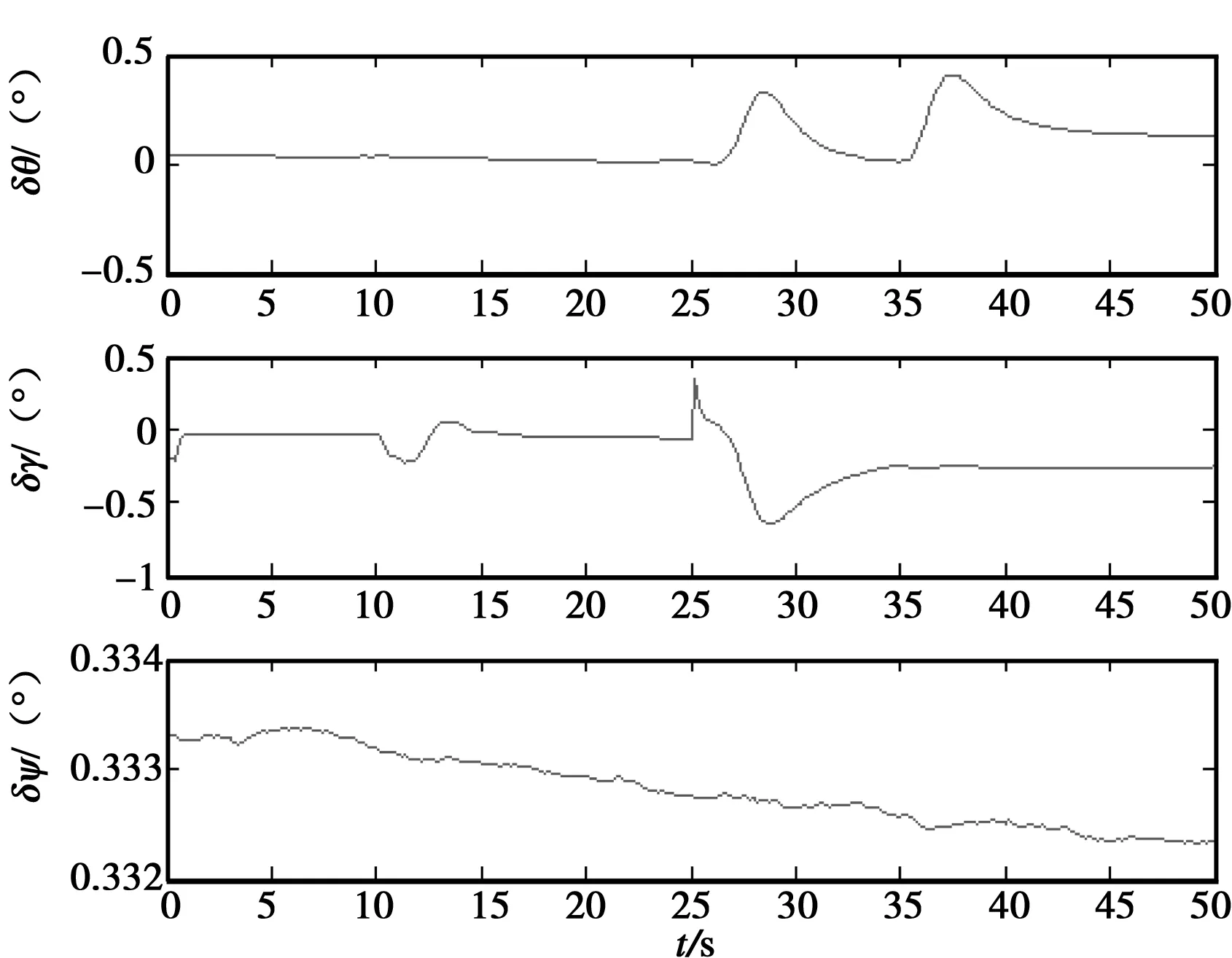
图5 导航姿态误差图
由图3~图5可知,基于矢量跟踪软件接收机的相干深组合系统中由于引入惯导的加速度辅助,减小了接收机在高动态时段的剩余动态,在高动态环境中导航性能虽有波动,但会很快收敛到正常范围,总体精度较好,组合位置误差小于2 m,高度误差小于8 m,组合水平速度误差约0.5 m/s,天向速度误差小于1 m/s,姿态角误差小于0.5°.
4 结束语
为满足组合导航系统在高动态条件下导航性能需求,设计了基于矢量跟踪接收机的GNSS/SINS相干深组合导航方案。利用矢量跟踪取代普通独立式跟踪环路,加强通道间的辅助,充分挖掘导航信息;在通道预滤波中将码和载波分别用独立的滤波器处理,保障载波跟踪可靠运行;引入惯导的加速度辅助本地信号参数预测,对接收机与卫星视线方向的加速度进行较精确地测量,降低接收机在高动态时段剩余动态,提高了本地信号参数预测精度。 基于矢量跟踪软件接收机搭建了相干深度组合仿真系统,验证了基于矢量跟踪相干深度组合方法在高动态等环境下可提高动态跟踪能力,改善导航精度、可靠性。
[1] 刘建业,曾庆化. 导航系统理论与应用[M]. 西北工业大学出版社, 2010.
[2] GEBRE -E. What is the difference between ′loose′,′tight′ and ′ultra-tight′ and ′deep′ integration strategies for INS and GNSS[J]. Inside GNSS, 2007,2(1):28-33.
[3] HASAN A M, SAMSUDIN K, RAMLI A R,etal. A Review of Navigation Systems (Integration and Algorithms)[J]. Australian Journal of Basic & Applied Sciences, 2009, 3(2):943-959.
[4] ADEEL M, CHEN X, YU W,etal. Performance Analysis of Deeply Coupled INS Assisted Multi-Carrier Vector Phase Lock Loop for High Dynamics[C]//International Technical Meeting of the Satellite Division of the Institute of Navigation,2015:3156-3164.
[5] BABU R, WANG J. Ultra-tight GPS/INS/PL integration: a system concept and performance analysis[J]. Gps Solutions, 2009, 13(1):75-82.
[6] 王新龙,于洁. 基于矢量跟踪的SINS/GPS深组合导航方法[J]. 中国惯性技术学报,2009,17(6):710-717.
[7] 秦峰. 基于矢量跟踪的高动态载体超紧组合导航技术研究[D].上海:上海交通大学, 2014.
[8] GROVES P, MATHER C, MACAULAY A. Demonstration of non-oherent deep INS/GPS integration for optimised signal-to-noise performance[C]// International Technical Meeting of the Satellite Division of the Institute of Navigation Ion Gnss, 2007:2627-2638.
[9] LANGER M, TROMMER G F. Multi GNSS constellation deeply coupled GNSS/INS integration for automotive application using a software defined GNSS receiver[C]//Position, Location and Navigation Symposium-PLANS 2014, 2014 IEEE/ION. IEEE, 2014:1105-1112.
[10] 高帅和. 分布式GPS/SINS超紧组合架构下的信号处理和信息融合技术研究[D]. 哈尔滨: 哈尔滨工程大学, 2012.
Research of Coherent Deep Integrated Navigation System Based on Vector Tracking
CAI Nanjing,GUO Chengjun
(ResearchInstitutionofElectronicScienceandTechnologyofUESTC,UniversityofElectronicScience&TechnologyofChina,Chengdu611731,China)
In order to meet the navigation performance of integrated navigation system in high dynamic environment,a method of GNSS/SINS coherent deep integration navigation is designed based on vector tracking.The tracking and navigation solutions of all the visible satellite signals are integrated by using the vector tracking loop to strengthen auxiliary between channels. For the high dynamic impact more on PLL tracking,the DLL and PLL are separately processed by independent filters in the channel pre-filter.In the combination filter, the state dimension is reduced by difference between channels to improve the computational efficiency. The SINS is introduced to predict the local signal parameters in high dynamic environment to accurately measure the acceleration of the receiver and satellite.The residual dynamics of the receiver are reduced and the accuracy of local signal parameters prediction is improved. Based on vector tracking software receiver, a coherent integration simulation system is set up. Experimental results show that the dynamic tracking capability can be effectively enhanced with this system, which can ensure the precision and reliability of the integrated system.
Integrated navigation; vector tracking; coherent deep integration; High dynamic
10.13442/j.gnss.1008-9268.2017.02.010
2016-09-14
宁波市科技局民生重大专项C13(编号:2013C51008)
P228.4
A
1008-9268(2017)02-0044-06
蔡南荆 (1988-),男,湖北襄阳人,硕士,主要从事信号处理、组合导航研究。
郭承军 (1985-),男,山东青岛人,博士研究生,主要从事卫星导航研究。
联系人: 蔡南荆 E-mail: chanwey5@sina.com
