人体肌肉力量测量原理与方法综述
2017-06-05史冀鹏
史冀鹏
(东北师范大学体育学院,吉林 长春 130024)
运动人体科学
人体肌肉力量测量原理与方法综述
史冀鹏
(东北师范大学体育学院,吉林 长春 130024)
肌肉力量是人类生存与发展的前提条件,肌肉力量参数是力量训练、康复医学评定、工效学产品设计的基础数据。通过文献资料法梳理了近年来有关人体肌肉力量测量原理与方法的中外文献,包括66篇中文与38篇英文文献,综述了肌肉力量的表现层次、分类方法与特点及人体各部位肌群肌肉力量的测量方法。结果表明:据肌肉收缩的外部表现形式,肌肉力量可分为静力性力量与动力性力量2类;由于力与速度的不断变化,动力性力量更难于定量测量;肌肉力量测量常涉及人体单关节肌群力与力矩的测量,以及上下肢三关节联动时力与力矩转换成手或足部末端效应器力与力矩的测量;肌肉力量测评手段已由简单的静力性单关节肌群力与力矩的测量,发展到输出功率与总功变化的动态多关节肌肉力量的测量。
肌肉力量;测量原理;测量方法;末端效应器
人体在中枢神经系统的支配下,肌肉收缩产生动力,牵拉骨杠杆,以关节为枢纽进行转动,进而实现了工农业生产劳动、日常生活活动与各种体育运动,肌肉力量是人类生存和发展的前提条件[1]。人体肌肉力量的测量原理与方法在体育科学研究与指导训练、工效学培训与产品设计、康复医学评定与人工假肢研制等领域均具有重要的现实意义与应用价值。由于人体肌肉骨骼系统、神经系统对运动系统的调节和控制,运动系统的能量供应,人体与外界环境之间相互作用等的复杂性,肌肉力量测量也是一件复杂的事情[2]。本文共查阅相关中外文文献104篇(包括66篇中文文献与38篇英文文献),在文献资料研究的基础上,从人体肌肉力量的测量实践出发,就人体肌肉力量的测量原理与方法进行了探讨,拟为人体肌肉力量参数的采集提供理论依据。
1 肌肉力量测量的基本理论
1.1 肌肉力量的分类方法与肌肉力量测量技术和方法相适应,按照人体肌肉收缩的外部表现形式,人体肌肉力量可分为静力性力量与动力性力量2类。静力性力量是当肌肉等长收缩时产生了一个静态条件,在此过程中肌肉的长度和身体环节位置没有变化。目前,关于人体肌肉力量可用的绝大部分信息是关于静力性肌肉力量的测量结果[3]。肌肉静力性收缩形式下,肢体环节维持在稳定状态,可避免关节运动对测试结果的影响,故易于标准化、可重复性高、操作简易、安全性高[4]。静力性力量测试除了方便以外,还显示出对肌肉最大可能的用力产生一种合理的评估。肌肉的力量—速度曲线也表明最大张力或力量确实是在肌肉缩短或拉长的“零速度”时发展出来的[5]。
无论肌肉是向心收缩、离心收缩、等速收缩,还是拉长—缩短周期收缩,在发力过程中肌肉的长度和身体环节位置均会发生改变。这种情况下测得的肌肉力量皆为动力性力量,如等惯性力量(Isoinertial Strength)、等速力量(Isokinetic Strength)与等张力量(Isotonic Strength)[1-2]。等惯性力量是指在运动过程中要克服的惯性保持不变所需要的力量能力,等速力量是把关节运动角速度设定为一个常数来测量的肌肉力量,等张力量则要求在动作中肌张力保持不变,但此种情况只能在离体肌肉试验时才能做到,所以欧洲科学家喜欢用术语“增加张力(auxotonic)”表示,它包含了张力和长度变化的肌肉收缩,其他作者也有用术语“异动力学(allodynamic)”表示,词头“allo”意思是“其他的”、“不是同样的”[6]。
1.2 静力性与动力性肌肉力量的特点静力性肌肉力量是受试者用意志所能发挥的力量值,由人体绝对力量和用意志调节肌肉活动的能力决定。多数等长肌肉力量测试研究表明,大致有3类因素会影响力量测试的结果[3-4,7-8]:第1类是肌肉的形态学因素,如肌肉横断面积的大小、肌纤维的走向、以何种类型的肌纤维为主、疲劳物质的堆积程度、能源物质的排空程度,以及测试时肌肉组织的温度等;第2类是神经的调控能力,如个体激活运动单位的能力与运动单位激活程度高低的能力、动用快慢肌纤维比例高低的能力、此比例在不同人之间以及不同肌群之间均存在着差异;第3类是测试环境的影响因素,如测试口令发出时音量的提升、不寻常的感官刺激、较高的喧闹声或击掌声均能影响受试者力量的输出过程,温度的影响和视觉刺激同样重要。因此,制订统一的静力性力量测试规范具有重要的意义。
动力性力量测试中受试者可以爆发用力的形式对抗身体、肢体或是外加质量惯性,测试中阻力或阻抗质量保持不变,对测试速度与加速度没有限制,所以可以较为准确地反映人体负重时肌肉的收缩与放松过程[6,9]。但是,动力性肌肉力量要比静力性力量更加难以描述和控制。1)动力性力量在整个时间内有显著变化,人体的任何一次动作均要求肌肉发力克服肢体环节或外在负荷的惯性,从静止进入运动状态,紧接着进入减速阶段又回到静止状态。此过程中速度的改变会产生加速度,因此肌肉力量在整个过程中均要发生变化[2];2)肌肉的力量—速度曲线表明,肌肉向心收缩中力量与速度成反比关系,收缩速度的增加会伴随着肌肉力量的降低,因此动力性力量是难以测量和预测的[5,10];3)动力性力量测试由于仪器设备庞大、测试方法复杂、测试费用昂贵,较难适用于大样本人群肌肉力量状况的调查。
1.3 肌肉力量的表现层次人体肌肉的配布规律有适应直立行走和劳动的特点,上肢屈肌发达而下肢伸肌发达,上肢关节灵活性要高于下肢,上肢以推、拉、抓、握动作为主,而下肢各关节的屈伸运动幅度较大,以蹬伸动作为主。人体的上肢(上臂、前臂、手)与下肢(大腿、小腿、足)和相应的关节(肩、肘、腕;髋、膝、踝)又可以看作一个三环节的运动链,若肩关节或髋关节的躯体部分固定,手或足可以自由活动,则此运动链是一个开放式的三环节运动链,手或足是此运动链的末端效应器[11-12]。
肌肉力量有3个表现层次:第1个层次是肌纤维或一块肌肉发出的肌张力,科学文献上多是从第1个层次来定义肌肉力量,以便于从基础理论层面入手阐述肌肉力量产生的机制与原理,如肌肉三元素模型中收缩元的力学机制,肌张力与肌纤维长度、收缩速度之间的关系等基础性研究[2,13]。
第2个层次是肌张力转换成关节力与力矩,在实践中测量肌肉力量往往在第2个层次上,人体骨骼肌为单关节肌或多关节肌,肌肉的起止点至少要跨过一个关节,肌肉力量表现为骨骼肌收缩牵拉骨杠杆转动产生的力或力矩,如对人体髋、膝、踝、肩、肘、腕6大关节屈伸肌群静力性或动力性肌肉力量的测量[14]。第2个层次上的肌肉力量测量,只要统一测试姿势,固定待测关节,避免其他肌群的代偿作用,即可很好地评价单关节肌群的功能能力或是功能缺陷[15]。
第3个层次是多个关节的力与力矩转换成末端效应器——手或足部的力与力矩,人们日常所说的力量大多是指第3个层次的表现,现实工作与生活中的人体行为动作通常表现为多个肢体环节共同参与、多个相邻关节联合运动的形式,即多环节运动链上的各关节力与力矩转换成末端效应器的力与力矩,而手或足末端效应器是动作执行效果的直接表现载体[12,16]。因此,第3个层次上的肌肉力量测量能很好地评价多个关节肌群联合运动时的功能能力或是功能缺陷,但在肌肉力量测量时统一测试姿势与避免无关肌群的代偿作用时有一定的难度[2,13]。
综上可知,人体肌肉力量参数采集常涉及髋、膝、踝、肩、肘、腕6大关节力和力矩的测量,以及上下肢三关节联动时力与力矩转换成手或足部末端效应器力和力矩的测量。
2 肌肉力量测量的部位与方法
2.1 人体单关节肌群肌肉力量的测量方法在不考虑肌肉收缩速度的情况下,利用力量传感器可获取人体单关节肌群的静力性肌肉力量,即等长收缩的力量。力量传感器主要由2个部分组成,首先是在力或力矩作用下能产生应变的元件,其次是能把这种应变转换成可测量输出(如电压、电流等)的元件,按材料类型可分为压电晶体或压容体传感器。在静力性力量测试中,需要各种不同的传感器来适应身体各部位肌肉力量的测量要求[2,13]。当然,大型旋转式测力系统,如Biodex、Cybex、Contex等速肌肉力量测试系统与BTE PrimusRS模拟仿真测试评价训练系统均可实现人体单关节肌群静力性肌肉力量参数的采集[9-10]。测定时要求受试者的关节角度固定,否则力臂、肌肉初长度的改变均会影响到肌肉力量的测试结果。
多数情况下,人体是在中枢神经系统的支配下,肌肉收缩产生动力牵拉,骨杠杆以关节为枢纽进行转动,从而实现工农业生产劳动、日常生活活动与各种体育运动,是一种动态的做功过程。在人体转动力学中,运动环节角速度与扭矩的乘积为肌肉的输出功率[10,17]。因此,无论速度的快慢,均会有功率的输出且可被测量。在旋转式测力系统中,如测试角速度在500°/s以内的Biodex、Cybex、Contex等速肌肉力量测试系统,以及测试角速度高达4500°/s的BTE PrimusRS模拟仿真测试评价训练系统上,可同步记录运动环节的力臂、力、扭矩(力矩)、角速度等参数随时间的变化量,以推算被测肌群的输出功率、总功变化量等一些可量化肌肉动态工作能力的参数[6,9]。然而,这种大型的旋转式测力系统,造价普遍较高,测试费用昂贵,且不便于运输与携带。
2.1.1 人体单关节肌群静力性肌肉力量的测量方法 肌肉静力性收缩形式下肢体环节维持在稳定状态,可避免关节运动对测试结果的影响,故易于标准化、可重复性高、操作简易、安全性高。因此,静力性力量的测试更为常见。但是,用一个孤立点的肌肉力量值来评估肌肉的功能情况存在着明显的缺陷。因此,通过测量一连串关节角度的静力性肌肉力量值来绘制肌肉力量与关节角度的关系曲线,在实践中应用时较为全面(图1)[2,14]。
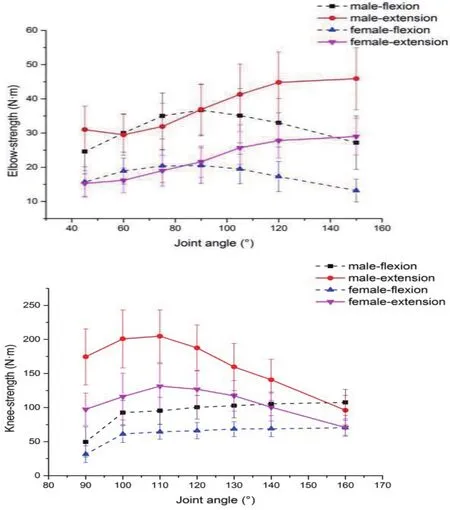
图1 大学生肘与膝关节静力性肌肉力量—关节角度关系图[14]
单关节中肌肉力量(表现为相对于某一关节轴的力矩,或平衡一个作用于环节末端的外力)与关节角度的关系曲线为肌肉力量曲线。但是要注意有2种关节角度的定义:1)关节夹角,即选择组成该关节的2个环节之间小于180度的夹角作为关节角度;2)关节解剖学角度,即关节与解剖学位置间的夹角。关节角度定义不同会影响到肌肉力量曲线的表现形式。测量人体肌肉力量曲线时每次只能改变一个关节角度,被测肌肉或肌群应是引起这个关节运动的主要原动肌,在测量的肌肉力量曲线方向上,关节应该只保持一个自由度,相邻环节要固定好。如图1所示,静力性肌肉力量仅反映关节处于某一个选定角度时的肌肉力量情况,进行多个关节角度静力性肌肉力量的测量,并绘制静力性肌肉力量与关节角度的关系曲线图,可掌握肌肉力量随关节角度的变化规律[14,18-19]。
2.1.2 人体单关节肌群动力性肌肉力量的测量方法
动态功率的变化可量化特定肌群短时间内的快速做功能力,以及肌肉长时间持续工作时的耐久力。肌肉输出功率为扭矩与角速度的乘积,因此力量—速度关系曲线能反映出肌肉功率输出能力的机能特征[10,20]。在一系列预负荷阻力设置的测试中,预负荷(阻力矩值)与测试系统的角速度成线性关系,且肌肉向心收缩过程中力量与角速度成反比关系,收缩速度的增加会伴随着肌肉力量的降低[9-10]。如图2所示,以人体膝关节伸展肌群的动力性肌肉力量测量为例,Stauber等人曾以一位受试者的20种不同负荷与几位受试者的12种负荷(代表20%~80%静态最大力矩值) 的阻力矩值验证了此线性关系[20]。
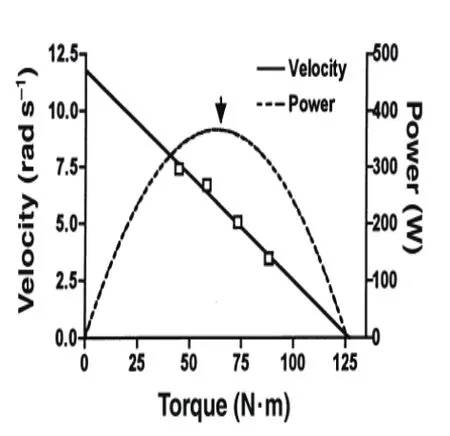
图2 扭矩—速度关系图[20]

图3 扭矩—速度与扭矩—功率关系图[20]
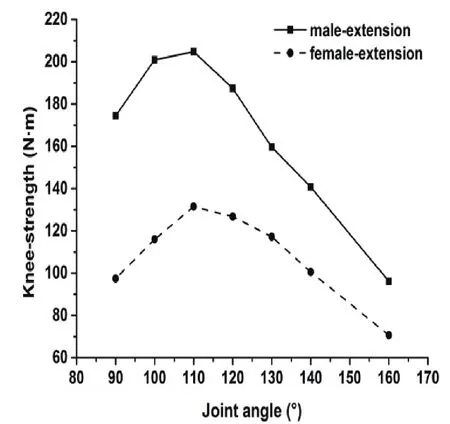
图4 静力最大肌力—关节角度关系图[14]

图5 伸膝肌群重复性伸膝次数与功率损失率的变化图[21]
另外,以肌肉力量为动力、骨为杠杆、关节为枢纽的人体转动力学中,同时考虑功率、扭矩、角速度三者之间的关系。如图3所示,伸膝肌群的最大输出功率出现在阻力矩值与角速度值均接近其最大值的50%时[20]。图4为伸膝肌群静力最大肌肉力量—关节角度关系图,此图表明伸膝肌群在膝关节屈曲110°附近时杠杆效率最高,此关节角度下的静力性肌肉力量值即为静态最大肌肉力量或力矩[14]。因此,取膝关节屈曲110°时测得的静态最大肌肉力量或力矩值的一半作为阻力负荷设置,即可测得伸膝肌群的最大输出功率值[6]。如图5所示,以伸膝肌群静态最大肌肉力量或力矩值的一半作为阻力负荷设置下,扭矩与角速度的最佳组合结果,每次伸膝动作均会产生一次最大输出功率,按照一定的频率持续运动直至疲劳,即可在短时间内量化伸膝肌群的耐久力[21]。然而,有关健康人单关节肌群最大功率输出与功率保持能力的测评研究较为少见,国内学者曾采用旋转式测力系统向心/离心的等张测量模式对人体单关节肌群最大功率发展与保持能力进行定量评价,测量结果如图6所示,测试结果包括功率(P)、总功(J)、距离(deg)、时间(s)等多个参数[6]。
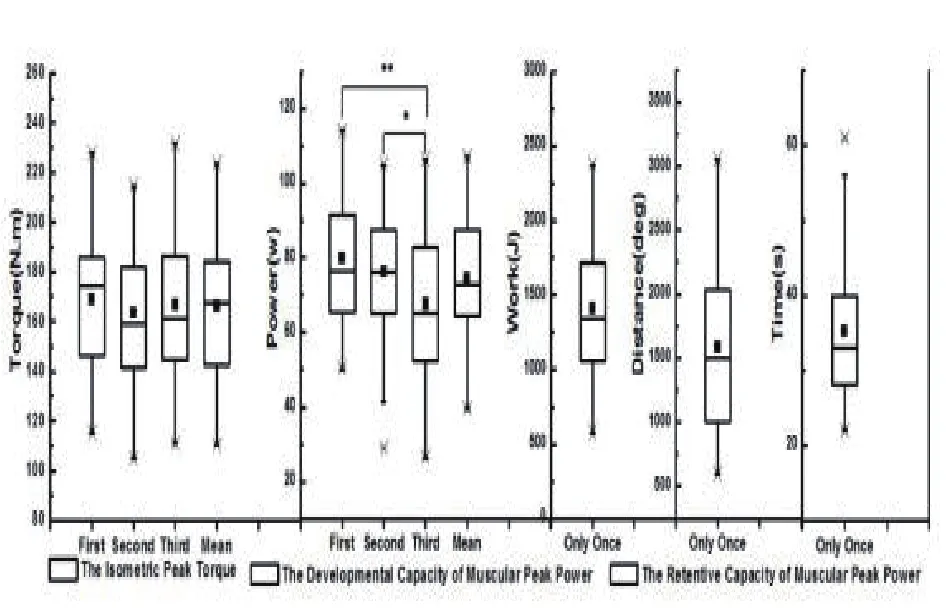
图6 青年人伸膝肌群功率快速输出与保持能力[6]
2.2 人体多关节联动肌群肌肉力量的测量方法实践中人体的大部分运动目标都是通过手或足的最终运动来实现的。末端环节的运动目标主要有3个:准确定位、获得速度和力量。3个目标中每一个目标的达到都是运动链共同作用的效果[11-12,16]。因此,不仅要测量单个关节周围肌群力量转换成关节力与力矩的问题,还要测量多环节运动链中多个关节肌群的力与力矩转换成末端效应器(手或足部)力与力矩的问题。旋转式测力系统如Biodex、Cybex、Contex等速肌肉力量测试系统,BTE PrimusRS模拟仿真测试评价训练系统,AKM、BKM、WKM与T.K.K肌肉力量测量系统,以及三维测力平台与分布式足底压力测试系统,均可不同程度地实现人体末端效应器力与力矩的测量。
2.2.1 末端效应器静力性肌肉力量的测量方法 人体多关节联动肌群静力性肌肉力量测量过程中,当末端效应器手或足部固定时,上肢或下肢三环节运动链由开放链变为闭合链,各个环节的自由度减少,肢体环节维持在相对稳定的状态,可避免关节运动对测试结果的影响[12]。因此,末端效应器静力性肌肉力量的测量结果更为常见。末端效应器的静力性肌肉力量与施力姿势、方式和方向有着密切的关系[19]。因此,能影响上述因素的参数,在测试过程中均应考虑到。
例如,足部不同关节角度蹬踏力的测量时,要同时考虑如下肢各环节的长度、关节角度、座椅高度、踏板角度、座椅与踏板间距等相关参数[16](图7)。以往研究表明,足部最大蹬踏力一般在膝关节屈曲160°时产生,蹬踏力的大小还与下肢离开人体中心对称线向外偏转的角度大小有关,下肢向外偏转约10°时的蹬踏力最大[19]。人体上肢的灵活性要强于下肢(图8),手部推拉力的测量结果表明,左手弱于右手,向上用力大于向下用力,向内用力大于向外用力[3,19]。
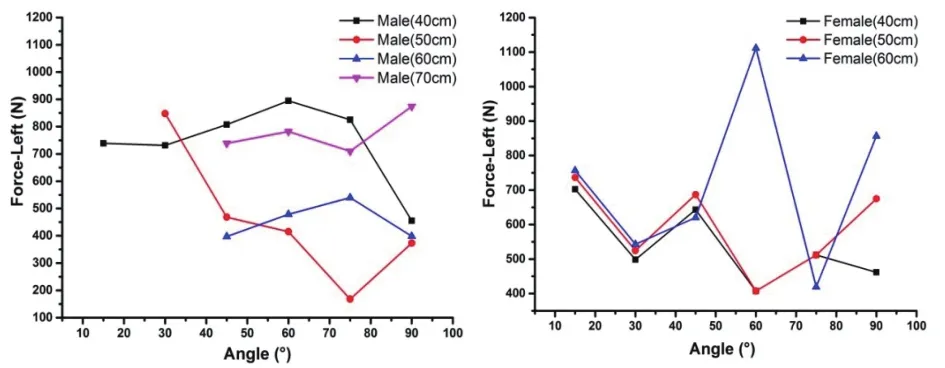
图7 青年人不同踏板角度与椅板间距下的足部静态蹬踏力[16]

图8 坐姿下手臂不同方向对不同角度的推拉力[19]
2.2.2 末端效应器动力性肌肉力量的测量方法 末端效应器动力性肌肉力量的测量常见于足部,常见设备有足底压力平板、压力鞋垫、三维测力台,它们是在换能器、传感器的基础上发展起来的足底压力测量系统,可以采集足底一维或三维受力与力矩随时间的变化曲线。利用影像学分析系统或红外运动捕捉系统同步记录人体下肢运动环节的运动学参数,可推算出各环节速度、加速度的变化,以求取下肢末端效应器的输出功率或总功变化,进而实现对人体多关节联动效果动力性肌肉力量的测量[22,23,18,24](图9、图10)。同理,采用力学传感器记录手部作用力随时间的变化曲线,如Teksscan握压力力量分布测量系统、美国Mark-10手指套压力映射系统(GPMS)、手指套型高精度触觉测量系统 FingerTPS II等,并同步记录人体上肢的运动学参数,也可完成手部动力性肌肉力量的测量[25]。
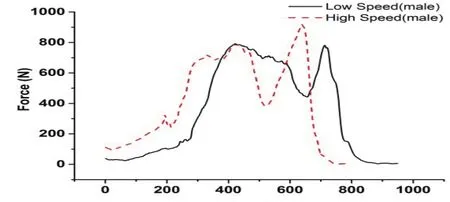
图9 青年人速度轮滑一个单步的足底压力时间变化曲线[22]

图10 青年人手工提举重物时足部三维受力时间变化曲线[23]
3 结 语
与肌肉力量测量技术与方法相适应,肌肉力量依据肌肉收缩的外部表现形式可分为静力性与动力性力量2类。由于力与速度的不断变化,动力性肌肉力量更难于定量测量。从人体肌肉的配布规律与肌肉力量的表现层次来看,肌肉力量参数采集常涉及人体6大关节周围单关节肌群力和力矩的测量,以及上下肢三关节联动时末端效应器力和力矩的测量。随着科学技术的不断进步,肌肉力量测评手段已由简单的静力性单关节肌群力与力矩的测量发展到输出功率与总功变化的动态多关节肌肉力量的测量,以求达到更准确地反映运动中人体肌肉工作模式的真实情况。
[1] 史冀鹏,徐红旗.肌肉功能测评与损伤修复机制研究[M].长春:东北师范大学出版社,2014:6-10.
[2] 金季春.运动生物力学高级教程[M].北京:北京体育大学出版社,2007:151-233.
[3] 丁嘉顺,杨磊.几种最大静态肌力的测定和分析[J].工业卫生与职业病,2004,30(3):142-145.
[4] 肖国兵,雷玲,G.DEMPSEY P,等.静态肌力及其影响因素的探讨[J].中华劳动卫生职业病杂志,2005, 23(6):401-404.
[5] 赵青山,刘文娟,李晓平,等.关于希尔方程与爆发力练习的研究[J].山东体育学院学报, 2008,24(5):68-70.
[6] 史冀鹏,徐红旗,张欣,等.运用BTE PrimusRS系统测定人体下肢单关节肌群极限功率与肌耐力的方法学研究[J].天津体育学院学报,2012,27(2):162-167.
[7] 单信海.等长训练对肌力的影响[J].南京体育学院学报, 1996,10(4):7-9.
[8] 王清,李汀,魏星.肌肉力量测量方法[J].体育科学, 1993,13(1):18-27.
[9] 徐红旗,张欣,冉令华,等.应用等张模式测定人体单关节肌群功率发展与保持能力的方法学研究[J].人类工效学,2011,17(4):13-18.
[10] 徐红旗,史冀鹏,倪维广,等.人体单关节肌群极限功率发展与保持能力研究进展[J].中国运动医学杂志,2013, 32(5):443-452.
[11] 黄浩洁.闭合与开放运动链动作生物力学特征分析[D].石家庄:河北师范大学,2016.
[12] 牛永刚.人体运动链功能训练结构模型研究[D].石家庄:河北师范大学,2016.
[13] 王清.我国优秀运动员竞技能力状态诊断和监测系统的研究与建立[M].北京:人民体育出版社,2004:69-159.
[14] 卢德明,王向东.青年人六大关节肌力研究[M].北京:北京体育大学出版社,2004:95-114.
[15] 宋爱晶,邓京捷,吕晓红,等.等速肌力测试膝、踝关节及腰背肌力量的评价[J].中国组织工程研究,2015, 19(46):7425-7429.
[16] 王平.下肢主要关节力矩和末端力关系的实验研究与应用[D].北京:北京体育大学,2006.
[17] 李林,纪仲秋.便携式肌肉等张收缩关节功率曲线测试系统的研制及等速肌力测试验证[J].成都体育学院学报, 2014,40(9):72-76.
[18] 单信海.测力台对人体肌肉力量测试的多项指标特征[J].中国临床康复, 2005,9(12):202-203.
[19] 丁玉兰.人机工程学(第4版)[M].北京:北京理工大学出版社,2011:78-82.
[20] STAUBER W T, BARILL E R, STAUBER R E, et al. Isotonic dynamometry for the assessment of power and fatigue in the knee extensor muscles of females [J].Clinical physiology (Oxford, England), 2000,20(3): 225-233.
[21] GONZALEZ-IZAL M,RODRIGUEZ-CARRENO I, MALANDA A,et al.sEMG wavelet-based indices predicts muscle power loss during dynamic contractions[J].Journal of electromyography and kinesiology:official journal of the International Society of Electrophysiological Kinesiology,2010, 20(6):1097-1106.
[22] 马国东.速度轮滑双蹬技术足底压力分布及传递特征研究[D].长春:东北师范大学,2006.
[23] 徐红旗,史冀鹏,倪维广,等.手工提放重物操作技术优化的生物力学研究[J].北京体育大学学报,2013, 36(11):75-80.
[24] 罗炯.足底压力分布测量技术的应用特点[J].中国组织工程研究与临床康复,2007,11(9):1734-1737.
[25] KORTIER H G, SCHEPERS H M, VELTINK P H.Identification of Object Dynamics Using Hand Worn Motion and Force Sensors [J]. Sensors (Basel, Switzerland),2016,16(12):2-17.
Review on Measuring Principle and Method of Human Muscle Strength
SHI Ji-peng
(School of Physical Education, Northeast Normal University, Changchun 130024, Jilin China)
Muscle strength is a prerequisite for human survival and development, and muscle strength parameters are the basic database of strength training, rehabilitation evaluation and ergonomic design. We analyzed the measuring principle and method of human muscle strength though literature review (66 Chinese and 38 English articles) in recent years, and summarized the muscle strength of performance level, classif i cation methods and respective characteristics, as well as the measuring method of muscle strength for various body segments. According to the external manifestation of muscle contraction, muscle strength can be divided into static strength and dynamic strength. Due to the constant change in force and speed, dynamic muscle strength is more diff i cult to quantitative measurement. The muscle strength involved the force and torque of muscle groups around the single joint, and the force and torque of end effectors such as hand and foot. The evaluation methods of muscle strength has been developed form the simple static force and torque of the single-joint muscle groups to the dynamic power output and total work of the multi-joint muscle groups.
muscle strength; measuring principle; measuring method; the end effector
G804
A
1004 - 7662(2017)02- 0082-06
2016-12-12
科技基础性工作专项(项目编号:2013FY110200);中央高校基本科研业务费资助项目(项目编号:14QNJJ032)。
史冀鹏,讲师,博士,硕士研究生导师,研究方向:运动生理学。
