计算机视觉技术在目标航拍定位中的应用
2017-06-01石红岩王江涛
石红岩, 王江涛
(仰恩大学 a.数学系; b.工程技术学院,福建 泉州 362014)
计算机视觉技术在目标航拍定位中的应用
石红岩a, 王江涛b
(仰恩大学 a.数学系; b.工程技术学院,福建 泉州 362014)
目标航拍定位通过航拍采集图像信息,运用计算机视觉技术对采集的图像信息进行处理,从而实现目标的定位。根据定位所需的信息,提出了数据的采集内容以及实现目标定位的方法,同时,为目标航拍定位工程的实现提出了目标航拍定位的硬件方案。仿真验证了提出的数据采集内容、目标定位方法的有效性。海上救援部门,可以利用航拍设备,对所辖海域进行巡逻,一旦发现船只事故可以立刻掌握其位置信息,展开搜救行动。
计算机视觉技术;航拍定位;硬件方案
0 引言
建设执法部门稽查违章建筑、交警追巡逃逸车辆、海上救援行动等等,很多都需要对目标进行定位。常用的目标定位方法有派遣人员巡视、通过监控系统进行大致观测等手段。这些手段有效率低下、存在盲区、定位不准等缺点。目前,随着计算机视觉技术的快速发展,通过图像或者视频数据对目标进行快速拍摄与快速定位处理成为可能[1]。空中拍摄(航拍)具有“站得高、看得远”的优点[2],而且飞行设备具有行动迅速、不容易遭受破坏干扰等优点。如果将计算机视觉技术与航拍技术相结合用于目标的定位将具有重要的实际意义。例如建设执法部门可以采用遥控航拍设备,利用计算机视觉定位技术,快速寻找在建或者已存在的违章建筑,视野宽广全覆盖,巡逻效率高;交警可以在发现可疑车辆的时候迅速使用遥控航拍设备对可疑车辆进行跟踪、定位,避免因为行动反应较慢、交通堵塞、路口监控设备破坏而造成可疑车辆逃逸情况的发生,让可疑车辆无处遁形。鉴于基于计算机视觉技术与航拍技术对于目标定位的重要现实意义,非常有必要研究一种采用计算机视觉技术的目标航拍定位方法。
1 计算机视觉定位原理
计算机视觉定位技术越来越受到国内外专家学者的重视。从摄像设备的几何模型建立视觉图像与地球坐标系的几何关系。首先,输入想定位的目标信息,然后通过视觉系统对采集的图像进行识别与匹配,计算出图像中目标的位置,运用视觉图像与地球坐标系的几何关系,最后计算出目标在地球坐标系中的绝对位置。
输入的目标信息主要是图像特征参数,包括颜色、形状等[3]。特征点是图像的重要局部特征之一,它确定了图像中目标的颜色与形状,对采集的图像进行特征点提取是计算机视觉定位中非常重要的一项工作。
计算机视觉处理模块需要把图像中提取的特征点与输入目标信息进行匹配才能进行目标的识别。图像匹配也是计算机视觉定位中非常重要的工作之一。由于点特征相对于线特征以及其他特征更容易提取与使用,所以通常图像匹配都采用点特征匹配的方法[4]。
图像中目标绝对位置与目标在地球上绝对位置的几何模型,不同的摄像设备存在差异,但是基本都有一个固定的几何模型,通过该模型可以方便地根据目标在图像中的位置计算出目标在实际空间相对于图像坐标系原点的相对位置。只拥有该位置还不足以得到目标的绝对位置。GPS定位技术是目前使用最为广泛的地球坐标绝对位置获取方法之一[5],通过在摄像设备上加装GPS可以简单快速地得到摄像机的绝对位置。通过图像坐标系、摄像机坐标系与地球坐标系之间的关系,可以方便地得出拍摄某图片时,图像坐标系原点的绝对位置。图像坐标系的原点坐标与目标实际在图像坐标系上的空间相对位置相加便可得到目标在地球坐标系上的绝对位置。
2 目标航拍定位硬件方案
为了实现目标的航拍定位,需要使用计算机视觉处理模块、信息传输模块、遥控模块、GPS模块、图像采集模块、飞行平台等功能模块。计算机视觉处理模块的作用为:目标信息的输入、图像处理、GPS位置修正与导入、目标定位。常用硬件为单片机或者嵌入式系统[6-7]。信息传输模块分为控制台端信息传输模块与飞行端信息传输模块,其主要负责信息的发送与传输。遥控模块分为控制台遥控模块与飞行端控制模块。控制台遥控模块负责遥控指令发送;飞行端遥控模块负责遥控指令的接收与执行。GPS天线的作用是对图像采集装置位置进行定位,安装的时候应安装与艏艉连线上[8],最好在图像采集装置的正上方。图像采集模块负责图像的采集,常用设备是摄像机与照相机,安装在飞行平台的艏艉连线上,最好安装与GPS天线正下方。飞行平台可以是无人机、无人飞艇等设备。
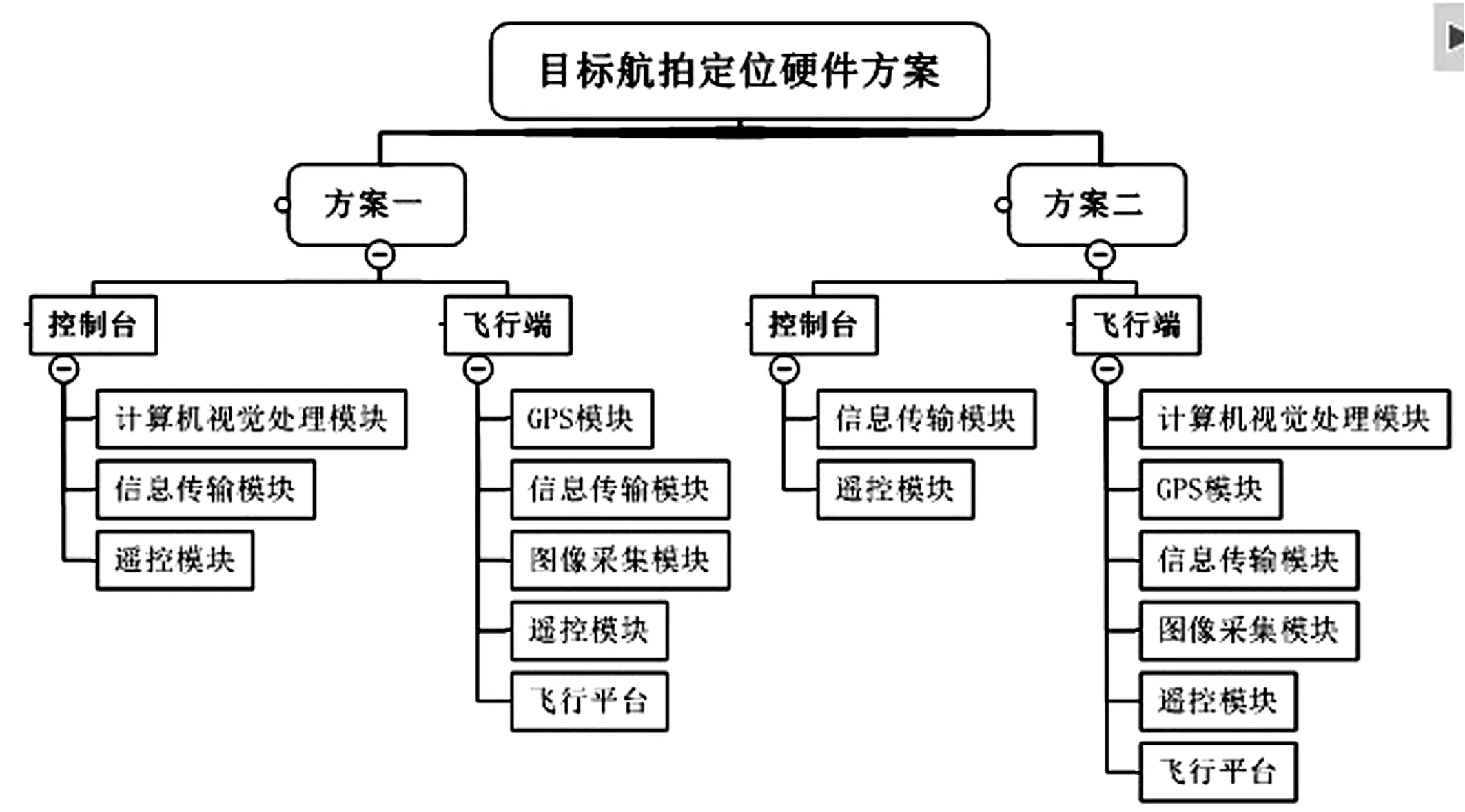
图1 目标航拍定位硬件方案
目标航拍定位硬件可以有两种结构方案,如图1所示。方案一为:控制台由计算机视觉处理模块、信息传输模块以及遥控模块组成;飞行端由GPS模块、信息传输模块、图像采集模块、遥控模块及飞行平台组成。方案一的优点为飞行端结构相对简单,且任务较少,图像的处理目标的定位都交由地面控制台完成,处理速度快速,人机交互方便,成本较低;缺点是图像传输工作量大,容易受干扰,信息传输模块负担较重。方案二为:控制台由信息传输模块与遥控模块组成,飞行端由计算机视觉处理模块、GPS模块、信息传输模块、图像采集模块、遥控模块及飞行平台组成。方案二的优点为信息传输模块工作量少,不容易受干扰,图像可以不用全部传输,可以只传输一些相对敏感的图像,除了控制台还可以发展多终端接收设备,接收目标定位的结果信息,可扩展性强;缺点为飞行端结构复杂,工作量大,成本较高。两种硬件方案各具优缺点,在设计时可以根据实际需求确定采用何种方案,例如:违章建筑搜寻,需要频繁的人机交互,采用方案一更加便捷;可疑车辆搜寻最终希望处于不同位置的不同人都能实时掌握信息,需要多接收终端,采用方案二更为适合。
使用时,第一步应该首先让飞行端在标校飞行高度,对摄像头角度进行调整,对图像与实际距离的比例进行记录。第二步,通过控制台载入目标信息以及初始飞行参数等信息。第三步,放飞飞行端,通过控制台控制飞行端的飞行,并通过控制台或者其他接收终端接收飞行端传输过来的信息进行目标的定位,以此实现区域的巡查、追踪或者搜救等目的。
3 航拍定位方法
3.1 坐标系的建立
研究基于计算机视觉技术的目标航拍定位,需要在大地上和图像上建立坐标系。涉及到地球坐标系、摄像机坐标系与图像坐标系,因为只考虑地面目标的定位,坐标系可以只采用水平面坐标系。 地球坐标系是目标空间位置的绝对坐标系统,它是全局坐标系, 可以用来描述地球上的任何位置。 摄像机坐标系是以摄像机位置为坐标原点,以正北方向为Y轴的坐标系。图像坐标系以图像中心为原点,以飞行平台艏向为Y轴。图像坐标系可以由摄像机坐标系旋转ψ(艏向角)得到。
3.2 目标相对航拍器的位置计算
通过航拍图像标校,得到两目标相距l0时,在h0的高度上,对应摄像头图像上面的距离为c0,当高度不变时有:
其中:l为两目标相距距离,c为两目标在航拍图像上的距离。
当高度变为h时则有两目标距离l为:
设航行器的艏向为ψ,则有摄像头坐标系中,目标在地面上实际的位置坐标(x,y)为:
即:
3.3 目标绝对位置计算


图2 目标绝对位置计算

图3 采用航拍器在高空中拍摄的图像
4 仿真验证
为了验证该方法的有效性,在武汉某上空利用航拍器进行了实测检验。步骤如下: (1)调整摄像头角度,使航拍器水平飞行时,摄像头恰好位于拍摄区域正上方即最中心;(2)调整航拍器飞行姿态,保持其在1米高度水平动态定位,拍摄水平面上1米长度标尺,得到的图像中标尺长度为0.0165米并进行记录;(3)采用航行器在2900米高空拍摄的图像,并记录拍摄该照片时航拍器的艏向与GPS获取的位置坐标。其中黄色的坐标系标识为图像坐标系标识,矩形框中心为待定位目标。图像尺寸大小为(15cm*15cm),航拍器记录拍摄图片时飞行平台艏向角为35deg,飞行端摄像头的位置为(30°37′22.50″'N,114°17′43.43″)。计算机视觉处理模块第一步处理得到目标在图像中的位置为(-6.6688cm,2.8442cm),第二步处理得到目标在摄像头坐标系中的位置坐标为(-1246.8466m,-262.7988m),第三步,对摄像头位置坐标进行高斯坐标转换并与目标在摄像头坐标系中的位置坐标相加,并经高斯坐标到地球坐标反变换,得到目标的位置为(30°37′36.99″N,114°16′58.69″E)。
5 结语
基于计算机视觉技术的目标定位技术研究在国内还处于起步阶段,在稽查违章建筑、交警追巡逃逸车辆、海上救援行动等领域均具有重要的现实意义。 由于地面或者海面上物体的位置与航拍图像上的相点存在几何对应关系,通过研究它们的对应关系,建立目标在图像上的位置以及目标在摄像头坐标系中的位置的几何关系模型,并通过GPS导入摄像头的绝对位置,通过坐标转换的手段获取目标较为精确的地球坐标位置。仿真实验表明:应用计算机视觉技术的目标航拍定位方法切实可行,能够通过航拍手段,快速、便捷、精确的实现目标的定位,可满足稽查违章建筑、交警追巡逃逸车辆、海上救援行动等领域目标定位的需求。目前只研究了摄像头位于待拍摄区域正上方拍摄图像的定位方法,该种方法对于航拍器的飞行姿态要求较高,如果飞行姿态存在误差,也会影响定位的精度。今后,还需要深入研究任意角度拍摄情况下的目标定位方法,并对定位误差的来源进行优化,降低对拍摄姿态的要求,使得对飞行平台的控制性能降低,以期达到便捷、快速、简单以及低成本的使用要求。
[1] 何林,柳林涛,许超钤,等. 常见平面坐标系之间相互转换的方法研究:以1954北京坐标系、1980西安坐标系、2000国家大地坐标系之间的平面坐标相互转换为例[J]. 测绘通报,2014(9):6-11.
[2] 吕宇波. 基于航拍图像的海上目标定位算法研究[D].厦门:集美大学,2012.
[3] 王红军,熊俊涛,黎邹邹,等. 基于机器视觉图像特征参数的马铃薯质量和形状分级方法[J]. 农业工程学报,2016(8):272-277.
[4] 李月龙,靳彦,汪剑鸣,等. 人脸特征点提取方法综述[J]. 计算机学报,2016(7):1356-1374.
[5] 李建才,吴彩霞,罗人述. 基于GPS和GPSOne的双定位技术在物流系统中的应用[J]. 物流工程与管理,2014(1):59-61.
[6] 李哲. 建筑领域低空信息采集技术基础性研究[D].天津:天津大学,2009.
[7] 姜涌. 基于计算机视觉的导引系统中若干关键技术的研究与实现[D].南京:南京航空航天大学,2006.
[8] 阎肖鹏,王海涛. 基于两台双天线GPS测向单元的靶船测姿方法[J]. 舰船电子工程,2012(5):65-67+106.
[9] 王福丽,陈雪松,韩静.基于DWT和SVD的视频水印算法研究[J].黑龙江八一农垦大学学报,2014(4):83-86.
[10] 富爽,许杰,邵一峰,等.基于FPGA的实时图像边缘检测器的设计[J].黑龙江八一农垦大学学报,2014(4):76-79.
责任编辑:程艳艳
ApplicationofComputerVisionTechnologyinTargetAerialShotLocation
SHIHongyana,WANGJiangtaob
(a.DepartmentofMathematics;b.CollegeofEngineeringTechnology,Yang-EnUniversity,Quanzhou362014,China)
Target aerial shot positioning captures the image information by aerial shot, and then uses the computer vision technology to process the collected image information so as to achieve the target location. According to the information needed for positioning, this paper puts forward the method of data acquisition and target localization. At the same time, it gives the hardware scheme for the target aerial shot positioning. The simulation results verify the effectiveness of the contents of the collected data and the method of the target location. Maritime rescue departments can use the aerial equipment to patrol the waters within the jurisdiction and immediately grasp the location information of the ship to search and rescue if there is an accident happened.
computer vision technology; aerial positioning; hardware scheme
2017-03-12
福建省教育厅中青年教师教育科研项目(JA15581)
石红岩(1983-),男,山东郓城人,讲师,硕士,主要从事密码学、计算机视觉方面研究;王江涛(1980-),男 ,山东威海人,副教授,硕士,主要从事密码学、计算机视觉方面研究。
TP391
A
1009-3907(2017)04-0008-04
