基于模糊控制的某重型车辆起步仿真分析
2017-05-30张雨佳李红勋彭超李心宇
张雨佳 李红勋 彭超 李心宇


摘要:根据湿式离合器起步过程的工作状态,利用MATLAB软件的模糊逻辑工具箱设计了某重型车起步模糊控制器,建立了起步仿真模型并进行仿真。仿真结果表明,所设汁的模糊控制器能够显著减少滑摩功和冲击度,具有较好的控制效果。
關键词:起步过釋
湿式离合器
模糊控制 MATLAB
中图分类号:U469.2.03文献标识码:A文章编号:1004-0226(2017)09-0084-04
1前言
模糊控制是一种基于规则的智能控制方式,其特点是将专家的经验表示为模糊语言,按照模糊控制规则进行推理,输出目标参数的值。模糊控制采用近似判断模拟专家的思维、动作和语言,不需要精准的数学模型,对于复杂、非线性系统具有极强的适应能力。
车辆起步过程的离合器控制需要根据驾驶员的意图和车辆状态对结合压力进行连续不断地调节和控制。以往结合压力大多采用比例控制,这样的控制策略难以适应平地、坡道等复杂行驶条件,且不能反映驾驶员意图,而对离合器采用模糊控制可以解决上述问题。本文对某重型车辆的起步模糊控制系统进行设计,仿真分析其控制效果。
2模糊控制器的设计
模糊控制系统的核心是模糊控制器,设计能够协调起步过程产生的滑摩功与冲击度的模糊控制器是非常重要的。文献提出的发动机局部恒转速起步控制策略具有良好的控制效果,其模糊推理系统包括两个模糊控制器:反映驾驶员起步意图的模糊控制器和计算离合器压力的模糊控制器。
2.1模糊控制器的原理
模糊控制策略的推理过程如同1所示,驾驶员意图模糊控制器根据油门开度及其变化率推理出反映驾驶员起步意图的比例系数;比例系数乘以发动机理论目标转速得到真实目标转速;离合器压力模糊控制器根据实际转速与真实目标转速的偏差及其变化率推理出湿式离合器的结合压力。
2.1.1驾驶员意图模糊控制器
为厂满足车辆行驶要求,驾驶人员需要根据需求调节油门开度和开度的变化率,随着油门开度的改变,驾驶员希望发动机达到的目标转速(发动机不同油门开度下最大转矩对应的转速为目标转速)也随之改变。在实际起步过程中,驾驶员控制的油门开度和开度变化率与希望达到的发动机转速是非线性火系的,因此需要对驾驶员意图进行模糊推理和控制。
比例系数模糊控制器是双输入、单输出的模糊控制器,输入变量为油门开度和开度的变化率;输出变量为比例系数。油门开度和开度变化率越大, 说明此时驾驶员希望快速起步,驾驶员意图比例系数就应当越小;反之,则起步比例系数应当越人。
2.1.2离合器压力模糊控制器
为了使发动机转速保持在目标转速附近,提高起步的品质,离合器的结合压力需要根据发动机实际转速与目标转速的差值以及变化率来调节,随着结合压力的改变,发动机的转速以及转速变化率也随之改变。在起步过程中,结合压力与转速差同样是非线性的,需要对结合压力进行模糊推理。
结合压力模糊控制器以发动机实际转速与目标转速和转速差为输入变量,结合压力变化率为输出变量。偏差和偏差变化率越人,说明发动机转速将更大地偏离目标转速,此时应当减小结合压力;反之则应当增人结合压力。
2.2隶属度函数和控制规则的确定
2.2.1驾驶员意图模糊控制器
2.2.1.1隶属度函数的确定
油门开度的物理范同为[0,1],取量化因子为1,可得模糊论域为[0,1]。将油门开度划分为很小(VS)、较小(S),一般(M),较大(B)和很大(VB)五个隶属函数;开度变化率物理范围为[0,0.2/s],同样取量化因了为1,可得其模糊论域为[0,0.2],同样将油门开度变化率划分为很小、较小,一般,较大和很大五个隶属函数。驾驶员意图比例系数的物理论域为[0.9,1],模糊论域同样为[0.9,1],将驾驶员意图划分为紧急起步(VS)、急起步(S)、正常起步(M)、慢起步(B)和爬行工况(VB)五个隶属函数。
隶属度函数曲线以识别率高的三角形隶属函数和稳定性能好的高斯型隶属函数为主,结合隶属度函数个数和模糊论域,制定隶属度曲线如图2所示。
2.2.1.2模糊规则和清晰化的设定
根据驾驶员意图确定推理规则:当油门开度处于很大且开度变化率很大时,表明驾驶员希望快速起步,为了缩短起步时间,此时希望发动机实际转速能够快速到达目标转速,即目标转速的比例系数应当处于紧急起步;当车辆油门开度处于很小且变化率处于负小时,表明驾驶员希望慢起步,此时希望发动机实际转速缓慢接近目标转速,即比例系数应当处于爬行起步,制定驾驶员意图比例系数模糊规则如表1所示。
使用MATLAB模糊工具箱设计的比例系数模糊控制器,其推理方法采用简单直观、广泛采用的Mamdani型推理,根据推理规则得到的比例系数模糊推理系统输出曲面,如图3所示。清晰化计算方法采用的是具有平滑输出推理控制的重心法计算公式为
2.2.2离合器压力模糊控制器
2.2.2.1隶属度函数的确定
转速偏差的物理范围为[-500r/min,500r/min],设计模糊论域为[-6,6],则比例因子为0.012,模糊论域包括负大(NB)、负小(NS)、中(Z)、正小(PS)、正大(PB)五个隶属函数。速差变化率物理范围定为[-lOOOr/min/s,lOOOr/min/s],同样设计模糊论域为[-6,6],则其比例因子为0.006,其模糊论域与偏差一致。不同国家的冲击度标准不同,我国为17.64m/S3,德国为10m/S3,前苏联为31.4m/S3。根据中国标准值设定结合压力变化率的目标变化范围为[-500N/s,500N/s],模糊论域为[-6,6],此时比例系数为83。在MATLAB模糊工具箱中设定转速差、速差变化率以及离合器压力变化率隶属度函数如图4所示。
2.2.2.2模糊规则和清晰化的设定
车辆所用发动机为WP12.480型柴油机,发动机的主要性能参数如表2所示。
離合器压力的模糊推理为:当发动机实际转速与目标转速的偏差处于正大且变化率处于正大时,说明此时发动机转速高于目标转速,为了在起步过程中使发动机转速保持在目标转速附近,离合器需要传递更大扭矩,即结合压力变化率应当处于正大;当转速差处于负大而变化率亦处于负大时,说明发动机处于低速,为了减小发动机负载扭矩,离合器扭矩应当降低,即结合压力变化率应当处于负大。根据结合压力变化率原理制定离合器结合压力的模糊推理规则如表3所示
根据模糊规则得到输出量和输入量的函数关系曲面表示与前文类似,在此不予列出,结合压力模糊控制器的清晰化仍采用重心法。
3模糊控制系统的建立
将驾驶员意图模糊控制器和离合器压力模糊控制器嵌入模糊逻辑控制(Fuzzy Logic Control)模块中,使用信号(SignalBuilder)模块模拟油门开度,将不同油门开度的目标转速输入到查表(Look Up Table)模块中,以油门开度和发动机实测转速为输入,离合器结合压力为输出,基于MATLAB/Simulink平台建立离合器结合压力的模糊控制系统如图5所示。
4仿真结果分析
某重型特种车辆仿真主要参数如下:整车质量为15000kg,一到七挡传动比分别为7.63、3.51、1.91、1.43、1、0.74、0.64,倒挡传动比为4.8,主减速比为9,迎风面积为5㎡,空气阻力系数为0.816,车轮半径为501mm,滚动摩擦系数为0.018。
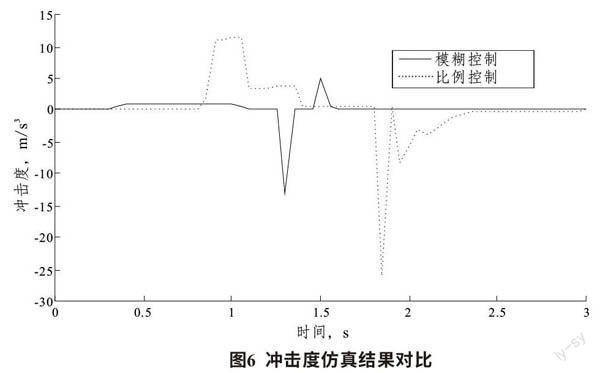
为了对比车辆起步时模糊控制策略的有效性,以在Simulink平台下给定比例变化的压力仿真结果作为对比,对起步过程仿真结果进行处理,得到车辆起步冲击度和离合器滑摩功的仿真结果如图6、7所示。
图6仿真结果可以看出,在车辆起步过程中,模糊控制策略时,车辆的起步冲击度为14.64m/s3,满足冲击度小于17.64m/S3的标准值;而当采用比例控制策略时,车辆的起步冲击度为26.93m/s3,将严重影响乘坐的舒适性及车辆安全性。
根据图7仿真结果可以看出,模糊控制策略时,仅用时1.1s,离合器阈值就从100%降为0,此时离合器产生的滑摩功为29000J;当采用比例控制策略时,离合器阈值从100%降为0需要1.7s,产生的滑摩功为49000J,参考某重型特种车起步过程试验数据,起步滑摩时间应在1s左右,滑摩功应控制为30000J左右,因此该模糊控制策略将极大地延长离合器使用寿命,控制效果良好。
5结语
对离合器结合压力进行了模糊控制,在Simulink仿真平台建立了车辆起步的控制系统并进行了起步仿真,结果表明车辆获得了更高的起步品质,降低了起步冲击度的同时缩短了离合器滑摩时间,减少了滑摩功,可见制定的模糊控制策略能够有效改善车辆的起步品质。
参考文献
[1]严萍华,张铁山,田乃利.电动清扫车作业电机的转速和转矩的模糊控制[J].专用汽车,2011(07):73-75
[2)孙冬野,秦大同.汽车离合器局部恒转速起步自动控制研究[J].机械工程学报,2003,39(11):108-111
[3]侯发伟.基于湿式离合器的商用车起步特性仿真与试验研究[D]吉林大学,2016
[4]董乐乐.某型AT平直路面换挡冲击度与滑摩功仿真研究[D].军事交通学院。2013
