永磁同步电机转矩切换响应分析及仿真
2017-05-30崔高健张增帅李绍松刘小勇窦景雷
崔高健,张增帅,李绍松,刘小勇,窦景雷,李 斌
(长春工业大学,长春 130012)
0 引 言
电动汽车因节能环保而成为新能源汽车研究的热点[1],此外,相对于传统汽车,其振动噪声影响较小。电机、电池、控制器的成熟应用,使电动车性能较传统汽车有很大的提高[2]。
永磁同步电机(以下简称PMSM)作为电动汽车的驱动源,其主要由转子、定子及其端盖等各部件组成。PMSM在转子结构上区别于其他类型的电机,电机转子结构不同,在制作过程、控制方法、电机性能、应用环境上也不尽相同。PMSM具有力矩响应快、易控制等特点,因而被广泛应用于驱动电动汽车[3-4],对于PMSM调速系统的控制策略主要有电流矢量控制策略和直接转矩控制策略。
电机输出转矩切换控制过程中存在的振动会影响电动车整车的舒适性、稳定性、安全性[5]。目前,对于电流矢量控制策略和直接转矩控制策略的理论研究及控制策略层出不穷[6],但是哪一种控制策略对高频振荡转矩跟踪性更好,没给出过明确的结论,本文以面贴式PMSM为研究对象,以周期性方波信号模拟电动汽车为产生期望的补偿横摆力矩所需要的转矩来作为控制系统的输入,建模并仿真比较电流矢量控制与直接转矩控制对于高频转矩切换的适应性和跟踪性的效果。本文结构由两种控制策略分析、仿真结果及分析、结论4部分组成。
1 PMSM直接转矩控制
对于直接转矩控制而言,PMSM的控制系统主要根据实际电机电磁力矩与期望转矩之间的误差,以及实际在定子上合成旋转磁场的磁链与给定的定子磁链之间的误差,并且依据总磁链所经过的扇区来选择逆变器的开关状态,从而使电机能够在所预定的轨迹运行。
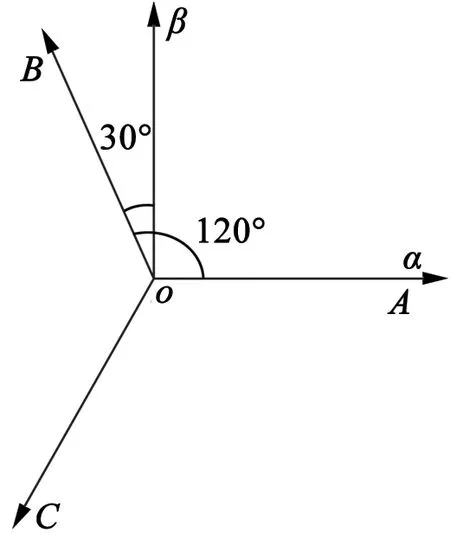
图1 α-β坐标系与ABC坐标系
静止坐标系如图1所示,基于该坐标系的电压方程:
(1)
式中:ua,ub,uc分别是电机定子三相绕组的电压矢量。可以用逆变器的开关状态向量Sa,Sb,Sc表示:
(2)
由式(1)与式(2)联合化简,可以得出:
(3)
式中:Sa,Sb,Sc为开关信号状态向量,分别为控制图2中逆变器每条臂上下IGBT门极,用于控制晶体管的导通与关断,当Si(i=a,b,c)取值为1时,管导通,下管关断;相对应的,当Si(i=a,b,c)取值为0时,下管导通,上管关断。

图2 逆变器原理图
静止坐标系下对应的电流方程与电压方程式(1)是对偶关系,在这里就不再叙述。
磁链方程:
(4)
转矩方程:
(5)
对式(5)求导得:
(6)
依据式(6)可以看出,若定子磁链ψs为定值,那么电机转矩是随着转矩角的变化而变化,改变磁链旋转的速度和方向可以改变转矩角的大小。由此可知,直接转矩控制的基本思想就是在保证磁链幅值不变的前提下,控制转矩角的变化来控制电磁转矩。因此,根据磁链幅值、转矩以及合成磁链经过扇区的变化情况,确定出控制逆变器的8组电压控制矢量(其中有两组电压矢量为零矢量,而每组电压矢量由控制逆变器开断的3个0或1状态组成),来保证磁链幅值基本恒定和保证转矩能达到期望值。8组电压控制矢量的选取规则如表1所示[7],表中的零矢量的选取主要依据尽量减少开关频率的原则选定。
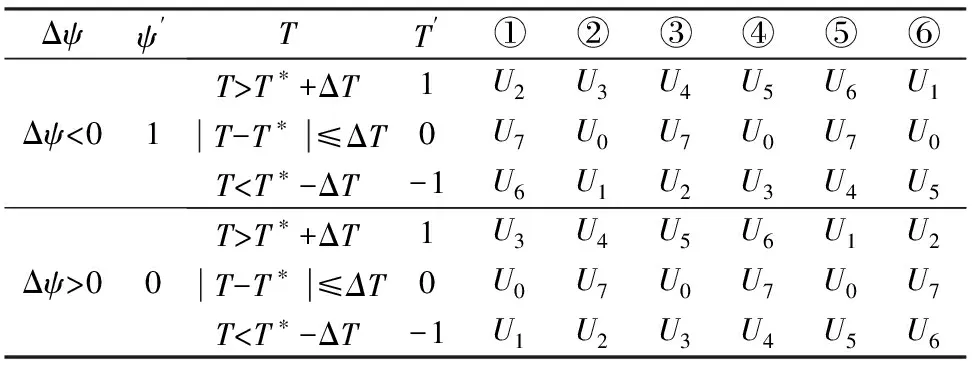
表1 逆变器开关参考表
表1中各变量表示如下:Δψ为磁链偏差;ψ′为磁链状态;T为电机输出的实际转矩大小;T*为期望转矩的大小;ΔT为转矩偏差;T′为转矩状态;Ui(i=1~6)Ui的取值主要依据尽量使逆变器桥臂开关关断次数最小为原则选定。①~⑥磁链扇区,各扇区与电压矢量对应关系如图3所示[8]。直接转矩控制的控制框图如图4所示。
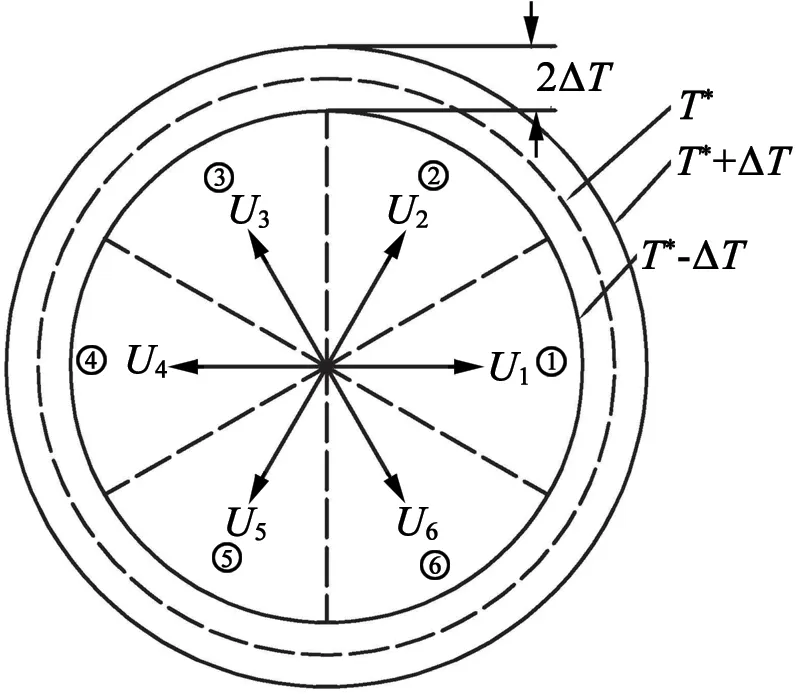
图3 电压矢量状态与扇区关系图

图4 直接转矩控制框图
2 PMSM电流矢量控制
PMSM矢量控制系统的电流控制方法有id=0控制、力矩电流比最大控制、功率因数等于1的控制、恒磁链控制。id=0控制是其中的一种,该控制方法简单、计算量小,对直轴电流的期望值为0[9],理想情况下不会产生直轴电枢反应,因此不会发生电机的去磁现象,定子电流产生的空间磁势与永磁体励磁磁场正交,电磁力矩的大小与交轴电流成线性关系,此时PMSM与直流电机模型近似,有着近似的性能特点,所有定子上的电流均用来产生电磁力矩,控制效率较高,因此被广泛引用。
PMSM运行时,在ABC坐标系中,若将定子三相绕组中A相作为空间坐标系的参考轴线,dq0坐标系如图5所示。

图5 dqo坐标系
假设PMSM在A,B,C在坐标系下的三相对称电流:
(7)
根据Park转换定理可知:

(8)
式中:θ为d轴和A相轴线的夹角,φ为A相定子组轴线和d轴方向一致时A相电流的初始相位。将式(7)与式(8)联立化简可得:
(9)
当转子磁极轴线和定义的d轴轴线重合时,依据磁场定向控制理论,电机电流的初始相位为180°,所以id=0,iq=I·e,其中I是相电流的有效值,e为单位向量。
基于d-q旋转坐标系,力矩公式可表示:
Te=p·[ψfiq+(Ld-Lq)·idiq]
(10)
由于面贴式PMSM的交轴与直轴电感相同,即Lq=Ld≠0,则:
Te=pψfiq=pψfIe
(11)
式中:p,ψf分别为极对数和永磁体产生的磁链;e为单位向量。
2r-2s变换关系如下:
(12)

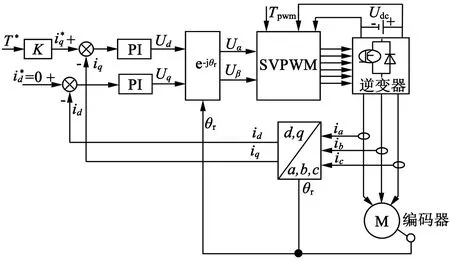
图6 id=0控制框图
3 仿真结果及分析
电动汽车在路况比较差的情况下进行制动、转向,尤其是在左右车轮附着系数不一样时,为保证车辆状态处于稳定,往往会对每一个轮毂电机进行实时的转矩分配,此时需要电机输出的转矩能够跟踪上车辆所需切换转矩,这种切换的频率一般是很高的。本文实验仿真的输入是假定一个固定频率(2 Hz)和固定幅值(10 N·m)的方波,如图7所示,以模拟现实中电动汽车需要的变化转矩,对两种基本的控制方法的转矩跟踪性能进行仿真,电机参数如表2所示。

图7 仿真模型输入

参数数值参数数值极对数p4磁链ψf/Wb0.175定子电阻Rs/Ω2.875转动惯量J/(kg·m2)0.000 8交轴电感Lq/mH85三角波周期T/s0.000 1直轴电感Ld/mH85三角波幅值A/V0.000 05
试验仿真结果如图8~图11所示,其中,图8、图10显示的是系统5 s的仿真结果,图9、图11分别为图8、图10中仿真时间为1 s处的局部放大图。具体仿真结果如表3所示。
从仿真结果分析来看,直接转矩控制比电流矢量控制而言,响应速度快,但是输出转矩脉冲较大,不能很好地跟踪目标期望转矩。若将该控制策略用于电动汽车上的PMSM,不仅没有改善由于湿滑路面产生摆动而影响车辆平稳性和舒适性,而且会加剧车身的抖动,降低车辆的性能,因此该控制方式不适用于电动汽车PMSM;而id=0控制,尽管在转矩的动态响应过程中响应时间较直接转矩控制长,但是对汽车整体的动态响应影响较小,同时电机输出转矩抖动很小,对于目标期望转矩能较好地跟踪。

图8 直接转矩控制的仿真波形

图9 直接转矩控制1 s处局部放大
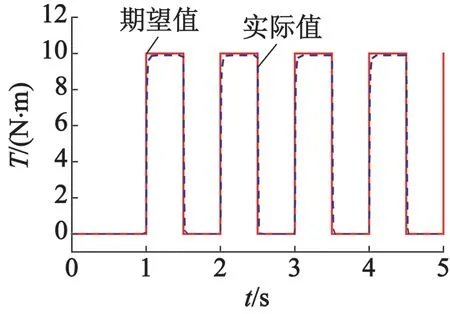
图10 id=0控制的仿真波形
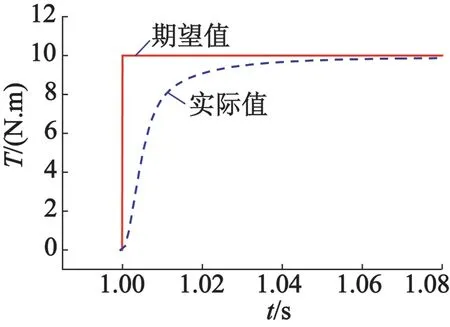
图11 id=0控制1 s处局部放大

技术指标控制策略数值跟踪时间t/s直接转矩控制0.01id=0控制0.04 转矩波动(%)直接转矩控制17.7id=0控制0.1
4 结 语
1) 在分析了PMSM及其两种主要的控制策略基础上,以面贴式PMSM为研究对象,对两种不同的控制策略进行建模仿真;
2) 对比分析两者的仿真结果,表明电流矢量控制策略相对于直接转矩控制,跟踪速度稍慢,但是超调量很小,对电动汽车的舒适性、稳定性影响较小,更适合用于控制PMSM来驱动电动汽车。
[1]YUANL,CHENH,RENB,etal.Modelpredictiveslipcontrolforelectricvehiclewithfourin-wheelmotors[C]//ControlConference.IEEE,2015:7895-7900.
[2]MUTOHN.Drivingandbrakingtorquedistributionmethodsforfront-andrear-wheel-independentdrive-typeelectricvehiclesonroadswithlowfrictioncoefficient[J].IEEETransactionsonIndustrialElectronics,2012,59(10):3919-3933.
[3]MORELF,LIN-SHIX,RÉTIFJM,etal.Apredictivecurrentcontrolappliedtoapermanentmagnetsynchronousmachine,comparisonwithaclassicaldirecttorquecontrol[J].ElectricPowerSystemsResearch,2008,78(8):1437-1447.
[4] 王鑫,李伟力,程树康.永磁同步电动机发展展望[J].微电机, 2007,40(5):69-72.
[5] 张缓缓,王庆年.电动轮驱动电动汽车直线行驶转矩协调试验研究[J].汽车技术,2010,(8):16-19.
[6]REZACMFS,ISLAMMD,MEKHILEFS.Areviewofreliableandenergyefficientdirecttorquecontrolledinductionmotordrives[J].Renewable&SustainableEnergyReviews,2014,37(3):919-932.
[7]YU-WENHU,TIANC,YOUZQ,etal.Directtorquecontrolsystemandsensorlesstechniqueofpermanentmagnetsynchronousmotor[J].ChineseJournalofAeronautics,2003,16(2):97-102.
[8]OULEDALIO,MEROUFELA,WIRAP,etal.DirecttorquefuzzycontrolofPMSMbasedonSVM[J].EnergyProcedia,2015(74):1314-1322.
[9]GROUZF,SBITAL,BOUSSAKM,etal.FDIbasedonanadaptiveobserverforcurrentandspeedsensorsofPMSMdrives[J].SimulationModellingPractice&Theory,2013,35(6):34-49.
[10] 郎宝华,刘卫国,周熙炜,等.空间矢量脉宽调制的仿真研究及应用[J].电机与控制应用,2007,34(8):6-9.