多波束测深精度评估
2017-05-25刘兆权
刘兆权
(中交一航局第二工程有限公司,山东青岛266071)
多波束测深精度评估
刘兆权
(中交一航局第二工程有限公司,山东青岛266071)
以港珠澳大桥岛隧工程KONGSBERG EM2040多波束测深系统为例,首先对多波束测深系统理论精度进行评估,然后采用相对测深精度及绝对测深精度比对的方法分别进行精度评估,并通过港珠澳大桥岛隧工程基床扫测数据进行精度验证。此种多波束测深精度评估方法可为其他多波束测深系统的精度指标确定提供参考。
多波束;相对测深精度;绝对测深精度;精度评估
0 引言
多波束测深系统广泛应用于大型工程中,但由于多波束测深系统受设备、安装方式等综合性影响,多波束测深系统的精度一直无法提供明确指标。本文以港珠澳大桥岛隧工程KONGSBERG EM2040多波束测深系统为例,介绍了多波束理论精度计算及实际测深精度及位置精度评估方法,并通过港珠澳大桥岛隧工程基床扫测数据进行精度验证。此种方法可为其他多波束测深系统的精度指标确定提供参考。
1 仪器设备介绍
多波束测深系统大致上可以分为多波束声学系统、多波束数据采集系统、数据处理系统、外围辅助传感器、成果输出系统[1]。多波束声学系统指多波束换能器探头,负责波束的发射与接收;多波束数据采集系统及数据处理系统主要用于将波束的形成和将接收到的声波信号转换成数字信号,并反算测量距离[2];外围辅助传感器主要包括GPS、姿态传感器、光纤罗经、表面声速仪、剖面声速仪等,目前姿态传感器及光纤罗经一般采用两者相结合的OCTANS光纤罗经姿态运动传感器;成果输出系统综合各类测量软件进行测量数据的后处理及最终成果的输出。
港珠澳大桥岛隧工程采用KONGSBERG EM2040多波束测深系统,EM2040多波束测深仪的发射频率200~400 kHz,测深条带覆盖角度140°,宽深比可达5.5倍,最大量程可达600 m,波束数256个,沿航线波束角0.7°,垂直航线波束角0.7°,最大航速可达10 kn,最大发射频率(ping)可达50 Hz,脉冲长度很短,小于25 μs,测深精度满足IHO国际海道测量特级标准[3]。通过各种辅助设备进行数据改正,确保了采集数据的准确性。
2 多波束测深原理
多波束测深系统的发射基阵和接收基阵采用相互垂直的结构,发射基阵平行于船体的艏艉线,接收基阵垂直于船体的艏艉线。实际测量时,多波束的发射和接收是按照一定的模式进行的,通常,发射波束的横向大于纵向,接收波束宽度纵向大于横向。
多波束测深仪工作原理见图1。换能器阵发射扇形声波波束,照射测量船正下方的一条狭窄水域。声波在水中传播,碰到该水域底部泥沙等界面时发生反射,因各反射点距离换能器的远近不同,回波返回的时间亦不相同;到达换能器的回波中包含了水下地形的起伏等信息[4]。对各回波信号进行固定方向的多波束形成、能量累积、幅度检测等处理,即完成一次测量。此时根据对应角度的波束可以计算出各反射点到换能器的距离信息,再经过简单的三角变换即可同时测出多点的深度信息。通过GPS、姿态传感器、声速剖面仪等辅助传感器对波束进行绝对位置、姿态等相应改正,即得到海底地形情况。
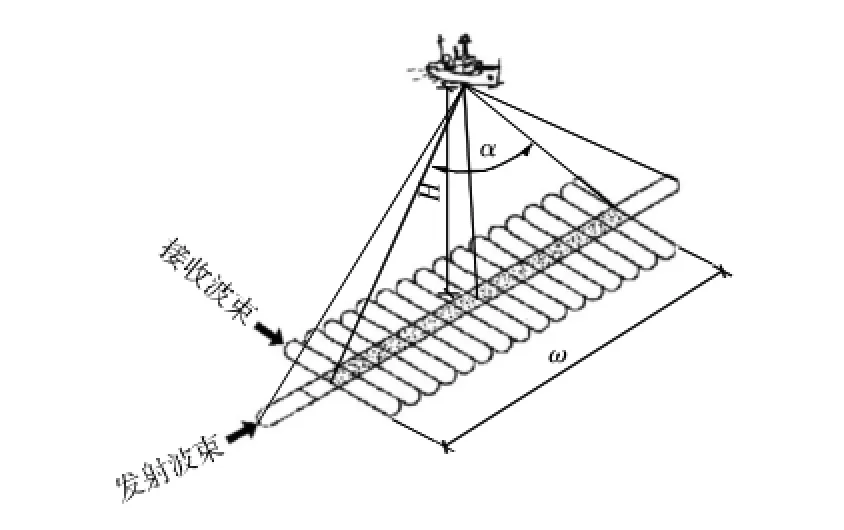
图1 多波束条带测深系统工作原理示意图Fig.1The principle diagram of multi-beam swath bathy metric system
图中ω即为扫海宽度,扫海宽度由最边缘波束之间夹角α决定的。多波束测深仪具有较大的宽度,因此多波束测深仪在扫测效率上要高于单波束测深仪。多波束测深仪的另一项重要指标就是量程,即设备能测量的最大和最小深度,它是由系统所采用的声波频率、发射功率、基阵的结构等决定的。
3 多波束测深理论精度评估
多波束测深系统引起误差的主要因素包括多波束换能器量程引起误差、多波束辅助传感器引起误差,包括姿态测量误差、声速测量误差及GPS测量误差,下面分别对这些误差进行分析。
3.1 多波束换能器量程误差
多波束换能器误差见图2,其中H为水深,R为斜距,θ为波束发射角,θBW为波束角。

图2 多波束换能器误差示意图Fig.2The schematic of error of multi-beam transducer
多波束换能器的测距分辨率σ计算公式为:σ=cτ/2
根据波束几何关系,可求得多波束测深仪的空间分辨率。
横向分辨率:δx=cτ/2sin θ
垂直分辨率:δz=cτ/2cos θ
纵向分辨率:δy=HθL
式中:θL为纵向波束角。
本测深仪τ取最佳值25 um,则计算可得本测深仪最大垂直分辨率:δz=1.875 cm。
3.2 姿态测量误差
测量船姿态对测量误差造成影响主要在两个方面,船横摇(roll)造成误差,船纵摇(pitch)造成误差。
测量船姿态误差对多波束测深高程的影响表达式为:dz=Ltan φ dr+Ltan pdp。
式中:L为水深,φ为波束入射开角,dz为船体姿态测量误差对多波束测深高程的影响。
姿态传感器安装后均进行严格校正,可认为姿态仅受偶然误差影响,考虑到本工程中参数设置,量程限制一般为70 m,波束入射开角一般选取60°,纵摇取10°,根据姿态传感器测量误差dr、dp均为0.01°计算,则船体姿态测量误差对多波束测深高程的影响为:

3.3 声速剖面测量误差
由于海水作用,声速剖面在海水中并不是沿直线传播,而是在不同介质层的界面处发生折射,因此波束在海水中的传播路径为折线。为了得到波束脚印的真实位置,必须沿着波束的实际传播路线进行声线跟踪,通过声线跟踪波束投射点在船体坐标系下的实际坐标[5]。声速剖面测量误差主要源于仪器的系统误差和环境变化的影响。环境变化引起的声速剖面测量误差很难通过一定的量值进行标定。仪器的系统误差引起的声速剖面测量误差Δz可通过如下方式计算:仪器的声速测量误差按仪器标称精度0.3 m/s计算,测区内最大深度按照45 m计算,则:

3.4 GPS RTK测量误差
本工程水深测量采用无验潮方式,通过RTK进行高程控制测量,RTK通过载波相位差分技术实时动态获取三维坐标,可有效保证大比例尺测图的精度。通过多波束换能器与GPS天线盘相对位置关系,即可将多波束换能器测深数据转换为海底高程。RTK控制精度为20 mm+10-6D(D为距离),本工程中流动站与基准站最大距离为7 km,则GPS RTK测量误差φz为:φz=20 mm+7 mm=2.7 cm
3.5 多波束理论精度
综上,应用误差传播率计算可得本套多波束测深系统理论精度ψz:

4 多波束精度评估
4.1 相对测深精度评估
多波束测深系统相对精度评估方法是通过一定的规划测线的测量,确定系统水深测量精度的方法。这种方法是多波束测深系统自身测量数据间进行的精度评估,可以确定除了系统偏差外的综合误差,是一种多波束测量水深精度的有效评估方法。由于多波束测深系统的一些传感器误差对测量水深的影响自中央波束向边缘波束增加,即中央波束精度明显高于边缘波束精度。因此,进行中央波束与两侧波束水深的偏差统计是评估多波束测深系统相对精度的有效方法[6]。
选择合适的测量天气进行多波束相对测深精度检查,要求试验海区没有突变地形,坡度较缓。测线规划原则是布设两条平行的主测线,根据扫测区域水深状况确定测线间距,确保测线间距要达到条带宽度的50%重叠,同时布设2条检测线与主测线垂直。主测线及检测线见图3。
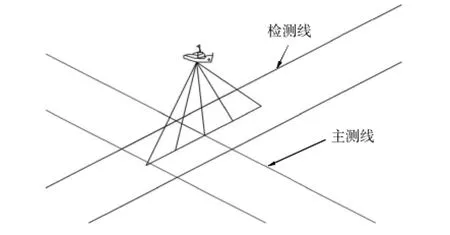
图3 主测线及检测线示意图Fig.3Schematic of inline and inspection line
多波束扫测完成后,将扫测的2条主测线和2条检测线重叠区域内水深点进行水深的误差统计。采用HYPACK中TIN Model进行Tin to Tin差值计算,选取多次多波束扫测数据进行差值统计,根据统计结果做出主测线和检测线偏差统计图见图4,以差值的平均值和中误差为指标评定多波束测深的相对精度。
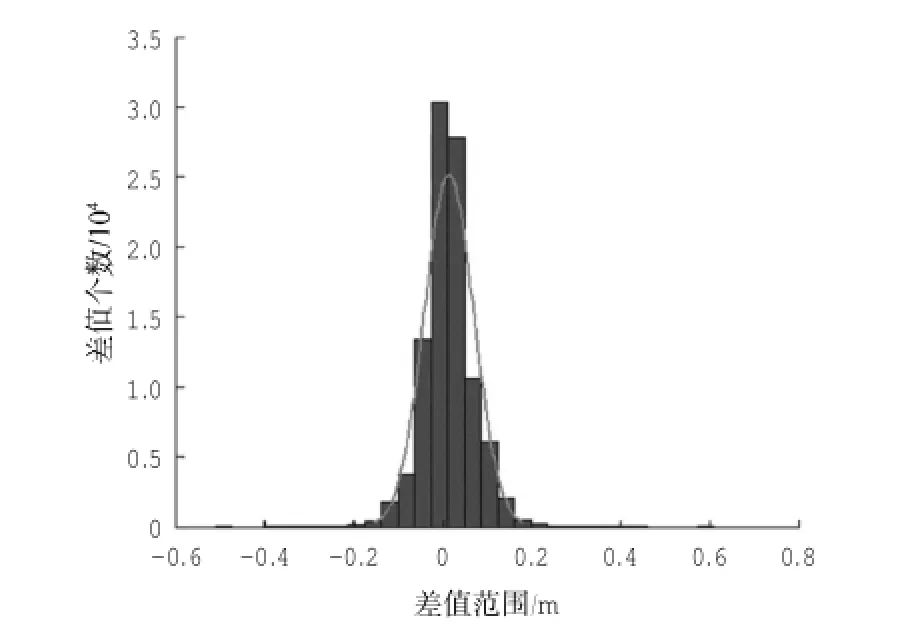
图4 主测线和检测线测深偏差统计图Fig.4The deviation chart of inline and inspection line
经计算,主测线与检测线的水深测量偏差的平均值为1.5 cm,中误差为5.6 cm。
4.2 绝对测深精度评估
为了进一步评定多波束测深系统绝对精度,以沉管管顶比对点为基准,计算多波束测深系统绝对精度。具体方法为:首先于预制场内将管顶比对点同管内测点进行标定,得到管内测点及管顶上点相对关系。沉管安装后通过管内贯通成果及管节内部点同管顶比对点相对关系推算出管顶测点高程,最后通过多波束扫测点同管顶反算高程进行比对。管内及管顶测点示意图见图5。
待安管节于沉管预制场内对管节内部点及管节顶部点进行标定,确定其相对关系。设xoy为隧道坐标系,XOY为管节坐标系,xp、yp为点P在隧道坐标系中的坐标,Xp、Yp为点P在管节坐标系中的坐标,a、b为管节坐标系原点o在管节坐标系中的坐标,α为隧道坐标系x轴相对于管节坐标系X轴的旋转角(顺时针为正,逆时针为负)。则管节坐标换算到隧道坐标系的计算公式为:

沉管安装后,于陆地至沉管管内进行贯通测量,通过管内贯通数据,得到管内测点隧道坐标及高程,通过管节坐标系与隧道坐标系相对关系可以推算出管顶比对点隧道坐标及高程。
采用多波束进行扫测,根据多波束测深数据得到比对点处多波束扫测高程,并将结果同管顶标定反算结果进行比对。通过多次多波束扫测计算多波束测深系统差值,做出差值统计图见图6。并以差值的平均值和中误差为指标评定多波束测深的绝对精度。

图5 管内及管顶测点示意图Fig.5The measuring point schematic view of the inner tube and tube top

图6 多波束扫测结果与管顶标定反算结果偏差统计图Fig.6Deviation calculation between multi-beam sweeping survey and top tube calibration survey
通过多次管节多波束扫测高程同管顶反算高程比对,计算得多波束测深系统扫测高程与管顶反算高程的偏差的平均值为1.2 cm,中误差为4.3 cm。
4.3 绝对测深位置精度评估
多波束测深位置精度评估方法同多波束绝对测深精度评估方法相同。
首先在待安沉管管顶安装测深位置精度比对板,比对板高度依次为3 cm、35 cm、10 cm、5 cm,比对板表面为1 m×1 m钢板。比对板安装位置见图7。

图7 多波束平面比对板安装图Fig.7Multi-beam planar alignment plate installation diagram
为了防止水流影响,比对板与沉管间采用中空方式。沉管安放前将比对板同管内点进行标定,得到沉管内部点同管顶比对板坐标的相对关系,标定方法同多波束测深绝对高程比对点标定方法一致。
沉管安放后,于陆地至沉管管内进行贯通测量,通过管内贯通数据,得到管内测点隧道坐标及高程,根据沉管管节坐标系及隧道坐标系相对关系进行转化,推算出管顶测深仪比对板隧道坐标,此坐标作为比对板实际坐标。采用多波束对沉管管顶进行多次扫测,通过多波束扫测数据确定比对板多波束扫测位置坐标并同实际坐标进行比对,并将比对结果进行统计分析。
因3 cm、5 cm比对板无法精确判断出比对板边界,仅对10 cm、35 cm比对板断面线进行平面位置统计分析,统计结果见表1。
平面位置差值统计:10 cm比对板断面边界平均差值为11.5 cm,35 cm比对板平均差值为12.6 cm。

表1 平面差值比对统计表Table 1The comparison between the plane difference value
5 多波束测深系统测量成果
港珠澳大桥岛隧工程隧道基槽开挖后,首先进行块石的抛填及夯平,然后进行碎石基床铺设。碎石基床铺设厚度为1.3 m,垄顶宽度1.8 m,垄沟宽度1.05 m。碎石基床垄顶部标高允许偏差为±40 mm,这对碎石基床的验收工作提出相当高的要求。沉管安装前首先对碎石基床进行多波束扫测,将扫测各垄数据进行数据拟合,即可计算碎石基床纵倾及首尾偏差;沉管安装后,对管节进行管内贯通测量,计算管节安装后纵倾及首尾端竖向偏差,计算结果见表2。

表2 管节E27碎石基床扫测贯通及设计标高比对Table 2The comparison of gravel bed through measurement and design elevation of tube E27
多波束扫测拟合后结果同贯通测量结果比较:首端竖向偏差相差7.6 mm,尾端竖向偏差相差13.2 mm,纵倾值相差0.004%。
6 结语
本文以KONGSBERG EM2040多波束测深系统为例,首先介绍了理论测深精度的计算方法,然后通过相对测深精度及绝对测深精度的方法对多波束测深系统测深精度进行精度评估,同时提出了绝对测深位置精度评估方法,并于港珠澳大桥岛隧工程中对扫测精度得到验证。此类多波束精度评估方法可为同类工程中多波束测深精度的评估提供参考。
采用验潮方式进行多波束高程控制的多波束测深系统,其理论测深精度中高程控制可由验潮精度及涌浪精度代替。在无绝对测深比对区域进行绝对精度比对,可加工比对板进行常规测量及多波束扫测数据比对。
随着多波束测深精度的提高以及国内大型水下工程的建设,多波束在水下工程中发挥的作用也越来越大。将多波束测深系统精度进行评估后,可以通过多波束测深数据为大型、精细水下工程控制提供数据参考。
[1]赵建虎,刘经南.多波束测深及图像数据处理[M].武汉:武汉大学出版社,2008. ZHAO Jian-hu,LIU Jing-nan.Multi-beam bathymetric data and image processing[M].Wuhan:Wuhan University Press,2008.
[2]刘兆权,孙阳阳,锁旭宏,等.SPS361代替光纤罗经的可行性[J].中国港湾建设,2016,36(7):12-14. LIU Zhao-quan,SUN Yang-yang,SUO Xu-hong,et al.A feasibility study about SPS361 instead of optical fiber gyrocompasses[J].China Harbour Engineering,2016,36(7):12-14.
[3]高耿明.多波束测深系统性能测试及其在疏浚工程中的应用[J].测绘通报2007,22(6):29-32. GAO Geng-ming.Performance text of multibeam bathymetric systemanditsusein dredging engineering[J].Bulletin of Surveying and Mapping,2007(6):29-32.
[4]范震寰.多波束测深关键技术研究[D].南京:南京航空航天大学,2005. FAN Zhen-huan.Sounding key technologies of multi-beam[D]. Nanjing:Nanjing University of Aeronautics and Astronautics, 2005.
[5]赵建虎,刘经南.多波束测深系统的归位问题研究[J].海洋测绘2003,23(1):6-7. ZHAO Jian-hu,LIU Jing-nan.Problems on conformity to the real sounding points from the multi-beam sounding system[J].Hydrographic Surveying and Charting,2003,23(1):6-7.
[6]吴英姿,徐新盛,乔力争.多波束测深系统的精度评估方法研究.[J].海洋技术,2003,22(3):65-69. WU Ying-zi.XU Xin-sheng.QIAO Li-zheng.The evaluation method of the precision of the multi-beam bathymetric system[J]. Ocean Technology,2003,22(3):65-69.
Accuracy assessment of multi-beam bathymetric
LIU Zhao-quan
(No.2 Eng.Co.,Ltd.of CCCC First Harbor Engineering Co.,Ltd.,Qingdao,Shandong 266071,China)
Taking the island&tunnel project of HZMB KONGSBERG EM2040 multi-beam bathymetric system as an example,we firstly evaluated the accuracy of this system theory,then used the method of comparison of relative sounding accuracy and absolute sounding accuracy to evaluate the accuracy respectively,and through the bed data of the island&tunnel project of HZMB to verify the accuracy.This method can provide reference for determining accuracy index of other multi beam sounding system.
multi-beam;relative sounding accuracy;absolute sounding accuracy;accuracy assessment
U652.2
B
2095-7874(2017)05-0063-05
10.7640/zggwjs201705014
2017-03-14
刘兆权(1980—),男,山东青岛人,高级工程师,测绘工程专业,主要从事测量工作。E-mail:825349113@qq.com