振幅可调的圆周振荡机构
2017-05-24柯显信信继忠杨阳
柯显信,信继忠,杨阳
(上海大学机电工程与自动化学院,上海 200444)
振幅可调的圆周振荡机构
柯显信,信继忠,杨阳
(上海大学机电工程与自动化学院,上海 200444)
针对目前圆周振荡机构的振幅一般不具有可调性的问题,研制了振幅可调的圆周振荡机构,该机构主要包括偏心运动机构和自适应动平衡机构,并对偏心运动机构进行动力学仿真和分析.结果表明,振幅可调圆周振荡机构的偏心运动机构可以同时实现0~50 mm摆正幅度可调和2~36 rad/s振荡频率可调,动平衡机构可以补偿工作台上不平衡质量对机器运行带来的不利影响,提高机器使用寿命.振幅可调圆周振荡机构具有振幅调节简单方便、速度快,机构整体简单紧凑、连接刚性、承载能力强、易维护等特点,在生物工程领域具有一定的应用价值.
圆周振荡机构;振幅可调;动力学仿真
圆周振荡机构已广泛应用于生物工程、生物制药、生物菌种和医疗业等领域[1-2],因此引起了研究人员的广泛关注.新型设计的圆周振荡机构[3-5]类型繁多,使用原理大多是在工作台面上放置玻璃瓶,瓶内装有接好菌种的液体培养基,接通电源后,菌种随着圆周振荡机构在水平面上旋转振摇,为菌丝的溶氧及扩大提供较好的条件.这种类型的圆周振荡机构具有传氧速率较高、功率消耗小、培养物不会溅到瓶口等优点[6].目前圆周振荡机构的振幅大多为固定值,例如:美国精骐立式单门双层恒温振荡器IS-RDV1,振幅为26 mm;德国IKA圆周振荡摇床KS 501,振幅为30 mm;英国Grant公司的圆周往复一体式振荡水浴摇床OLS 26,振幅为9 mm;上海博迅摇床BSD-YX 1400,振幅为26 mm;常州国华HY-6双层调速多用振荡器,振幅为20 mm.另外,也存在少数振幅可调的圆周振荡机构,例如:瑞士INFORS公司的振荡培养箱,振幅为25和50 mm;韩国DAIHAN公司的SHO圆周摇床,振幅为10,15和20 mm.但是,这类振幅可调的圆周振荡机构在使用的过程中,振幅不具有可调性或调节较为复杂.不同的细菌或菌种等[7-8]的培养条件是不同的,这就使得圆周振荡机构的使用范围受到一定程度的限制,从而需要用户购买不同振幅的圆周振荡机构,因此提高了圆周振荡机构的使用成本.
基于上述情况,本工作研制了振幅可调的圆周振荡机构,该机构振幅调节简单方便、快速,可以满足用户振幅可调的需求.
1 机构设计
1.1 偏心运动机构
圆周振荡机构的振幅改变原理是机构中从动轴的轴线与主轴的轴线产生偏心距.基于此,本工作设计了偏心距调节机构,该机构由主轴、从动轴、销轴及两个偏心距调整螺钉组成(见图1).相对于主轴的圆盘端,从动轴的圆盘端可以绕销轴转过一定的角度,且两圆盘为刚性连接,这样从动轴的轴线相对于主轴的轴线产生偏心距,转角不同,偏心距也随之改变.通过调节偏心距调节机构的调整螺钉,可以实现0~50 mm的任意摆正幅度,且该机构具有结构连接可靠,振幅调节简单方便、速度快等特点.图2为3种不同偏心距的偏心距调节机构.
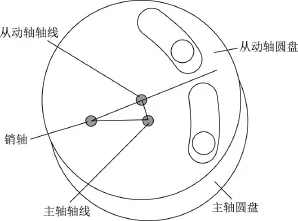
图1 偏心距调节原理Fig.1Principle of adjusting eccentricity
在偏心距调节机构的基础上设计偏心运动机构,该机构主要包括主电机、4个支撑轴、配重块、方形板、底座和固定座,其中每个支撑轴由支撑上轴、支撑下轴、直线导轨和轴承座组成(见图3).通过主电机带动皮带传动驱动主轴回转,主轴驱动偏心距调节机构和4个支撑轴回转,实现方形板的圆周振荡运动.当偏心距较大时,通过调整2个配重块的夹角改变质量分布.固定座使用具有吸振作用的铸铁材料,且4个支撑脚固定在地面上,最大限度地减小了由于机器高速运转而产生的移动,也可以在一定程度上调整固定座的高度.

图2 3种不同偏心距的偏心距调节机构Fig.2 Eccentricity adjusting mechanism with different eccentricities
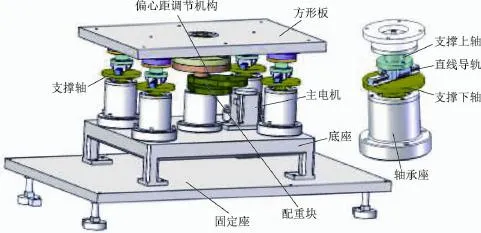
图3 偏心运动机构Fig.3 Eccentric motion mechanism
1.2 自适应动平衡机构
本工作研制的圆周振荡机构是高通量培养装置的重要组成部分,该装置配有在线光密度(optical density,OD)检测机构[9],OD检测头沿着x轴和y轴方向做大范围的平面运动(见图4).由于回转工作台质量分布不均匀,工作台质心位置不断变化.随着工作台的旋转,这些不平衡的质量分布就产生了不平衡的惯性力,使机器产生振动、噪声,从而降低了机器的性能、工作效率和使用寿命.根据磨床砂轮动平衡的工作原理[10-11],增加一个自适应动平衡机构,与不平衡质量实现相位平衡和质量平衡,这样可以补偿质量不平衡对机器寿命造成的不利影响,降低机器运动中产生的振动和噪声.
设在线OD检测机构质量为mhv,其中质量mh沿着x方向做水平运动,质量mv沿y方向做上下运动,三者之间的关系如下:

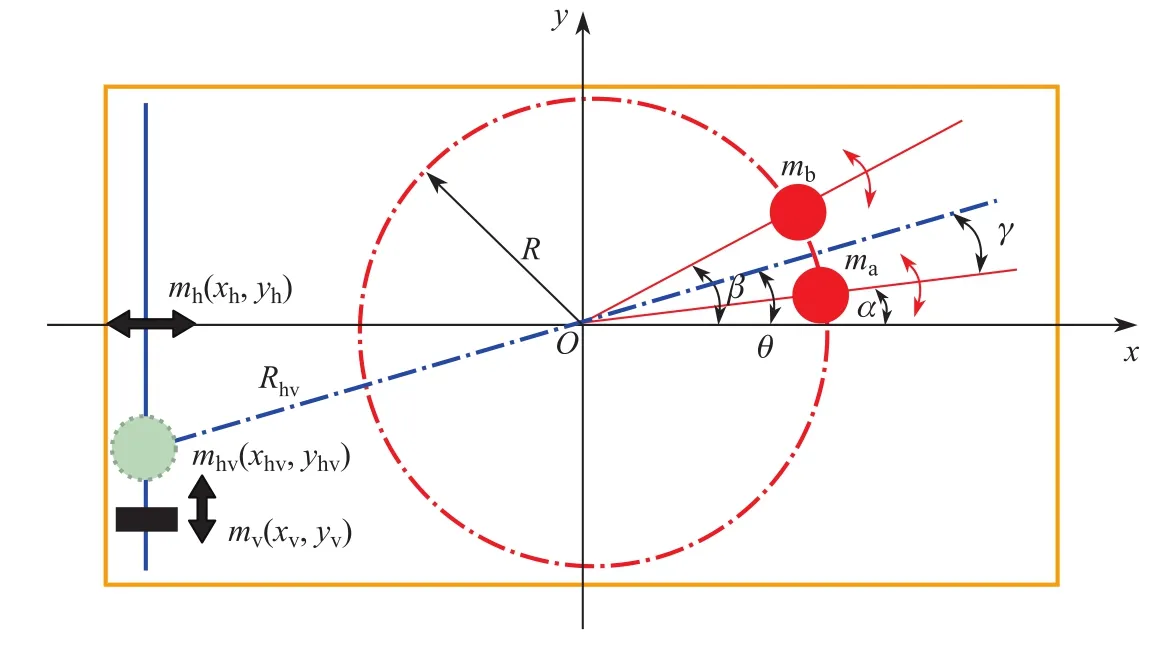
图4 自适应动平衡实现原理示意图Fig.4 Schematic diagram of adaptive dynamic balance mechanism

两个校正质量块的质量分别为ma和mb,位置方位角分别为α和β,运动半径为R.控制两个校正质量块的角平分线与不平衡质量的半径呈180°,实现相位平衡控制;控制两个校正质量块同时接近或远离,在保持角平分线不变的情况下,调整校正质量块与不平衡质量中心点连线的夹角大小,实现质量平衡控制.圆周振荡机构的动平衡实现原理如图4所示.
根据离心力平衡公式,可得

根据上述分析设计自适应动平衡机构(见图5).由图5可以看出,该结构主要由圆形板、圆形导轨、外齿圈和两个校正质量块组成,其中每个校正质量块由电机、小齿轮和电机固定板构成.电机驱动小齿轮旋转,并与外齿圈啮合,使得校正质量块沿着圆形导轨做圆周运动.外齿圈和圆形导轨均固定在圆形板上.
1.3 振幅可调的圆周振荡机构
图6为振幅可调的圆周振荡机构,该机构主要包括偏心运动机构、动平衡机构和工作台.通过偏心运动机构中的主电机带动皮带传动驱动主轴回转,主轴驱动偏心距调节机构和4个支撑轴回转,进而驱动动平衡机构和工作台同时做圆周振荡运动.该机构可以通过偏心距调节机构实现0~50 mm的摆正幅度可调,通过主电机调速实现2~36 rad/s的振荡频率可调,通过动平衡机构补偿工作台的质量不平衡对机器运行造成的不利影响.
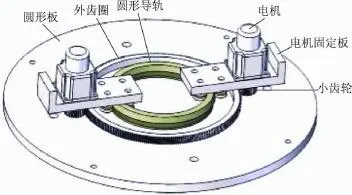
图5 自适应动平衡机构Fig.5 Adaptive dynamic balance mechanism
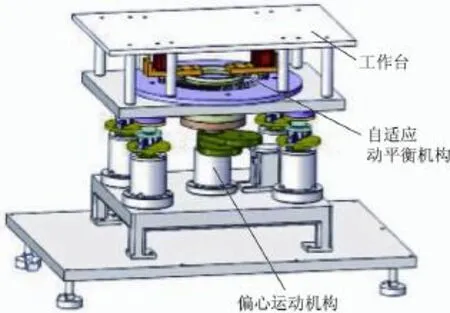
图6 振幅可调的圆周振荡机构Fig.6 Circumference oscillation mechanism with adjustable amplitude
2 动力学建模与仿真分析
将SolidWorks三维模型导入多体动力学仿真软件MSC Adams 2013,对偏心运动机构进行动力学建模与仿真分析[12].仿真的基本步骤如下:首先,建立零件的三维模型;然后,确定运动零件以及各运动零件之间的约束关系;最后,进行机构仿真分析.仿真时不仅可以设置控制参数,还可以与经验数据进行比较,也可以添加必要的辅助分析工具如传感器等,用以检验所建立的模型是否存在问题[13].建立虚拟样机时要尽可能地简化,在满足仿真性能要求的情况下,建模和简化的过程要遵循3点原则[14].偏心运动机构运动情况的动力学仿真如图7所示,此时调节偏心距为40 mm.
当主轴以一定方式运动时,各个零部件的运动位置、速度和加速度都存在一定的规律.利用Adams软件中的Measure模块测量方形板上任意一点的位移变化曲线和运动轨迹(见图8).由图8可知,方形板上任意一点的运动范围均为40 mm.运动范围由偏心距的大小决定,这与之前调节的40 mm偏心距保持一致,且运动轨迹是一个圆.应用后处理模块查看和分析任意一点的瞬时运动参数,在一个运动周期内,各零部件的位移为0,表示各零部件都回到原来的位置,并开始进入下一个运动周期.各个零部件间运动无干涉现象,从而验证了该偏心运动机构的可行性.上述分析为物理样机的加工提供了理论依据.
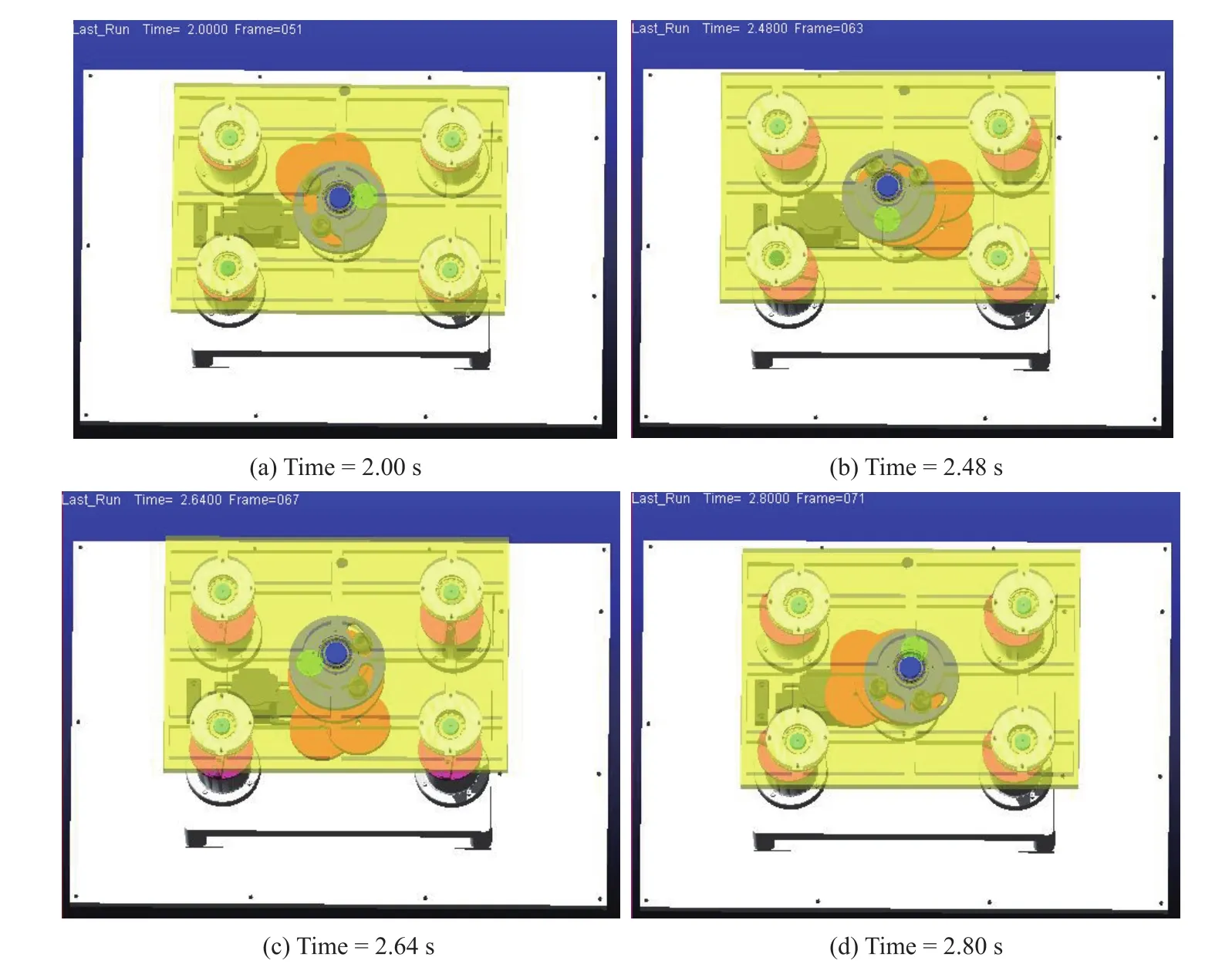
图7 偏心运动机构的模拟运动情况Fig.7 Simulation movement of the eccentric motion mechanism
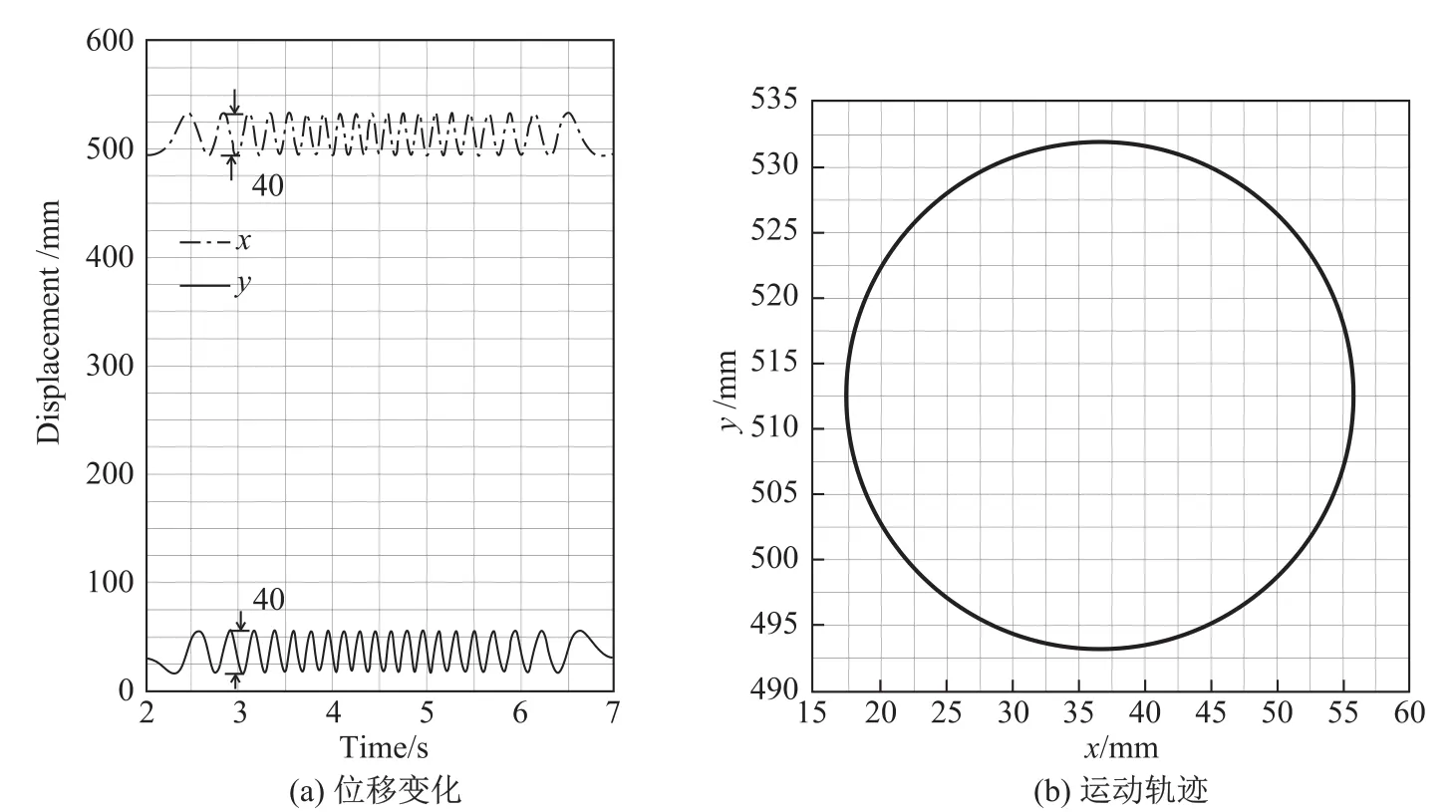
图8 方形板上任意一点的位移变化及运动轨迹Fig.8 Displacement curves and trajectory of a random point on the square plate
3 实验
图9为加工装配调试后的振幅可调的圆周振荡机构的物理样机.首先,单独对偏心运动机构进行实验,将该物理样机上方的动平衡机构拆下并调整为0,通过改变主电机的转速,观察偏心运动机构转速为2~36 rad/s时的运行情况,结果表明该机构运行平稳.当偏心距在0~50 mm变化时观察偏心运动机构的运行情况,结果表明机构运行良好.

图9 振幅可调圆周振荡机构的物理样机Fig.9 Physical prototype of the circumference oscillation mechanism with adjustable amplitude
最后,对整个物理样机进行实验.为安全起见,首先从偏心距较小的实验做起,在保证正常运行的前提下,逐渐增大主电机转速直至36 rad/s,然后调整偏心距的大小(最大为50 mm),逐渐提高转速(最大为36 rad/s)进行实验,同时测量振幅的大小.主电机转速为10 rad/s,偏心距分别为10,30,40 mm时振幅的测量结果如图10所示.由图10可以看出,振幅的大小与给定偏心距的大小是一致的.综上分析可知,该物理样机可以较好地实现0~50 mm的圆周振幅可调和2~36 rad/s的振荡频率可调,达到了设计目标.
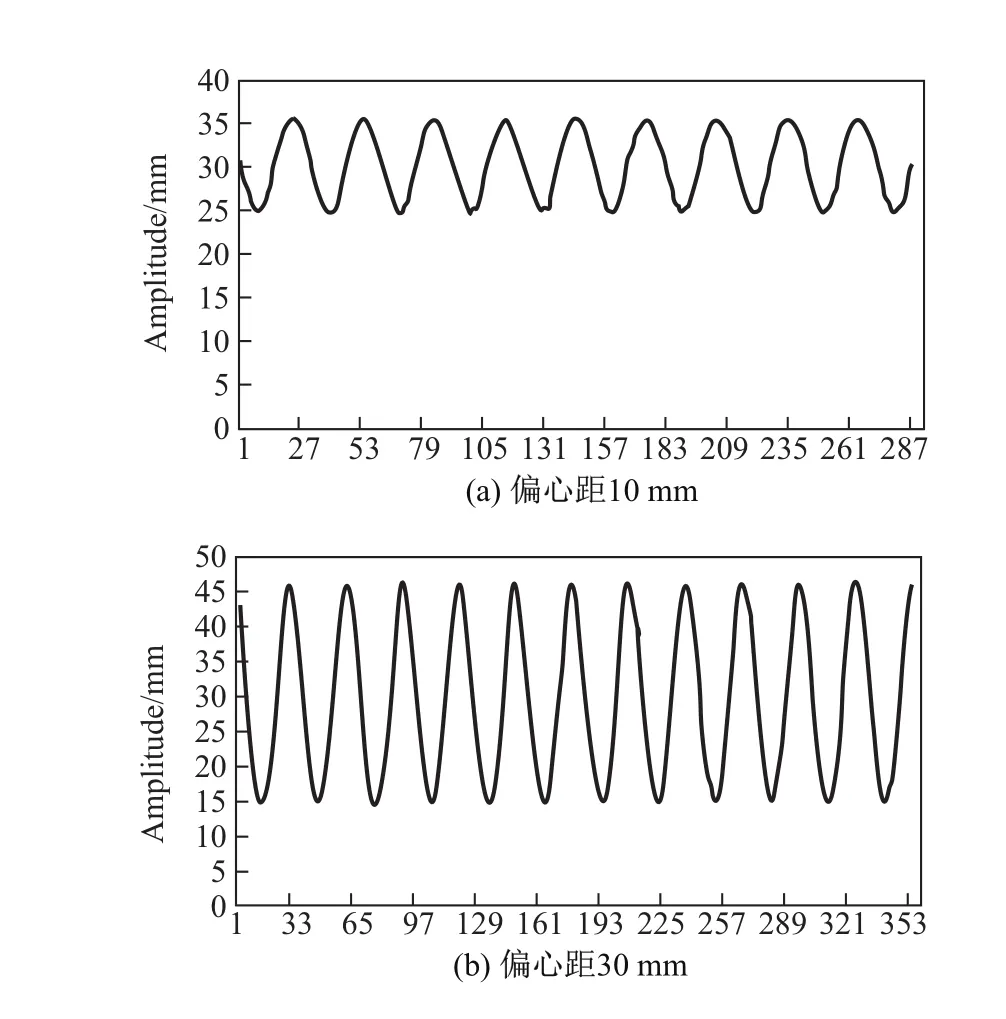
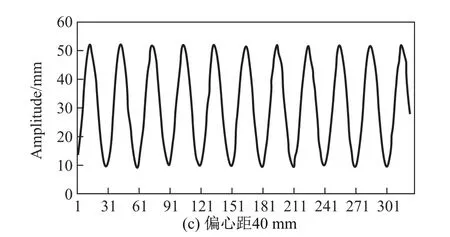
图10 偏心距不同时物理样机的振幅测量结果Fig.10 Results of measured amplitude for the physical prototype with different eccentricities
4 结束语
针对目前的圆周振荡机构的振幅在一般情况下不可调的问题,研制了振幅可调的圆周振荡机构,然后通过动力学仿真分析验证了偏心运动机构的可行性.实验结果表明,本工作设计的振幅可调圆周振幅机构可以同时实现0~50 mm的摆正振幅可调和2~36 rad/s的振荡频率可调,其中动平衡机构可以补偿工作台质量不平衡对机器运行造成的不利影响,提高了机器的使用寿命.振幅可调的圆周振荡机构具有振幅调节简单方便、速度快,机构简单紧凑、连接刚性、承载能力强、易维护等特点,在生物工程领域中的细菌培养、发酵、杂交及生物化学反应等过程中具有一定的应用价值.
[1]谢奎,雷云,黄鹂,等.高通量生物反应器Tubespin培养CHO细胞条件的优化[J].中国生物制品学杂志,2011,24(6):715-719.
[2]RADTKE A L,HERBST-KRALOVETZ M M.Culturing and applications of rotating wall vessel bioreactor derived 3D epithelial cell models[J].Journal of Visualized Experiments,2012(62): e3868.
[3]王永红,夏建业,唐寅,等.生物反应器及其研究技术进展[J].生物加工过程,2013,11(2):14-23.
[4]DONG X,WANG K D.Prediction and simulation on the shear stress and mass transfer in perfused bioreactorsⅠ:circular bioreactors[C]//Chinese Control and Decision Conference.2008:4237-4242.
[5]WATERS S L,CUMMINGS L J,SHAKESHEFF K M,et al.Tissue growth in a rotating bioreactor [J].Mathematical Medicine and Biology,2006,23(4):311-337.
[6]THOUAS G A,THOMPSON M C,CONTRERAS K G,et al.Improved oxygen diffusion and mechanical aggregation of tumor colonies in a novel stirred mini-bioreactor[C]//International Conference of the IEEE Engineering in Medicine&Biology Society.2008:3586-3589.
[7]佟芳,王辉.WAVE生物反应器在生物制品生产中的应用[J].中国生物制品学杂志,2009,22(12): 1254-1258.
[8]晁洋,倪华,兰青艳,等.使用旋转式生物反应器体外扩增人表皮细胞[J].现代生物医学进展,2011, 11(13):2409-2412.
[9]SZITA N,BOCCAZZI P,ZHANG Z Y,et al.Development of a multiplexed microbioreactor system for high-throughput bioprocessing[J].Lab on a Chip,2005,5(8):819-826.
[10]汪建中.磨床砂轮动平衡的原理与应用[J].机械工程师,2005(10):49-50.
[11]丛培田,魏巍,韩辉.磨床砂轮动平衡中平衡块调整量计算方法研究[J].工具技术,2014,48(3): 34-37.
[12]WANG Y P,ZHU H H,YU Y.Analysis on the simulation of kinematics control equipment based on Solidworks and ADAMS[C]//Chinese Control and Decision Conference.2011:635-640.
[13]芦宏斌,陈玮,程环.摇床机构仿真分析[J].医疗卫生装备,2012,33(8):24-27.
[14]罗建国,何茂艳,陆震,等.基于UG的串并联机器人ADAMS运动学仿真[J].机械设计,2007, 24(4):5-8.
本文彩色版可登陆本刊网站查询:http://www.journal.shu.edu.cn
A circular oscillation mechanism with adjustable amplitude
KE Xianxin,XIN Jizhong,YANG Yang
(School of Mechatronic Engineering and Automation,Shanghai University,Shanghai 200444,China)
As the currently developed oscillation mechanism generally does not have adjustable amplitude,a circular oscillation mechanism with adjustable amplitude is designed.It contains an eccentric motion mechanism and an adaptive dynamic balance mechanism.Dynamic simulation and analysis are carried out on the eccentric motion mechanism.Experimental results show that 0~50 mm adjustable amplitude and 2~36 rad/s adjustable oscillation frequency can be achieved simultaneously.Unbalance quality of the table causing adverse effects can be compensated by the adaptive dynamic balance mechanism to increase life of the die.Its oscillation amplitude can be changed easily, conveniently and quickly,with simplicity,compact mechanism,rigid connection,strong bearing capacity and easy maintenance.It is expected to be used widely in biological engineering.
circular oscillation mechanism;adjustable amplitude;dynamics simulation
TP 391.9
A
1007-2861(2017)02-0216-09
10.3969/j.issn.1007-2861.2015.02.008
2015-03-25
国家重大科学仪器设备开发专项资助项目(2012YQ150087)
柯显信(1973—),男,副教授,博士,研究方向为机器人技术和机电装备开发等. E-mail:xxke@staff.shu.edu.cn