基于物体特征有效提取和离散点三维重建的3D扫描系统原型研究
2017-05-24袁晓东
牛 晰,袁晓东
(1.郑州航空工业管理学院,郑州 450000; 2.航空经济发展河南省协同创新中心,郑州 450000)
基于物体特征有效提取和离散点三维重建的3D扫描系统原型研究
牛 晰1,2,袁晓东1,2
(1.郑州航空工业管理学院,郑州 450000; 2.航空经济发展河南省协同创新中心,郑州 450000)
针对3D扫描技术的近期发展情况,以及市场关于被摄物体特征有效提取的迫切需求,通过系统的对照相机和投影仪测量的方法与计算,利用离散点三维重建算法、标准化算法详细分析了,作为3D扫描原型系统的关键技术,并深入的对三维坐标重复演算的过程,进行了实践研究与计算,论证了基于投影光编码技术的3D扫描仪原型系统,在物体特征有效提取和离散点三维重建中完全可以高效应用;同时,使用焦距标准化运算、逆向倾角变形运算、逆向扭曲变形运算三种方法,综合论述了物体特征有效提取和离散点三维重建过程的相关内容,测试了原型系统对真实文物的扫描情况,展开了该原型系统可应用于不同材料,不同种类物体的扫描,并能有效的进行数字化物体特征识别的研究结论。
3D扫描仪;物体特征;提取;离散点;三维重建
0 引言
随着3D数字科技的发展,3D扫描技术已被广泛的应用于模具设计与制造、造型材料及工艺以及古代的文物保护等各类高新技术项目中,并且它已逐渐成为了获得物体三维数据信息的一个主要方法。如今,数以百计的各种品牌的3D扫描设备已经商品化并流入市场,在该设备设计开发的前沿,数十家来自美国、加拿大、日本和欧洲的重量级公司已在3D扫描设备方面投入大量的资金。例如,斯坦福大学、华盛顿大学和Cyberware公司,共同完成了数字化米开朗基罗的项目,该项目利用3D扫描设备扫描了几十尊由米开朗基罗雕刻的雕像,其中包括米开朗基罗著名的作品大卫。
经过近十几年的深度开发,与最初的3D扫描仪相比,虽然今天的3D扫描设备在所有方面,包括精度、可靠性、速度和可用性方面有所改善,但相关设备在我国的文物保护活动中还没有得到广泛的应用,这不仅仅是因为3D扫描通常要求较高的精度和细度,才能达到出色的扫描结果,更因为复杂物体特征的有效提取,需要通过更高成本、更科学、更先进的3D扫描仪来实现。
本研究中3D扫描系统原型中的关键技术是照相机和投影仪测量的方法与计算,其中照相机和投影仪测量的方法和计算是与物体特征有效提取和离散点三维重建一同实现的。研究收集了市场上现有3D扫描仪的大量信息,并比较它们所使用的技术,最终,采用投影光编码的技术来实现3D扫描仪原型系统。该编码投影光技术将不需要终端设备和硬件来实现,也同样拥有3D扫描的高精度。而该编码结构光的关键技术在于编码的光谱设计,同时研究提出了一种3D扫描原型系统梳理物体特征有效提取和离散点三维重建的计算方法[1],该原型系统完全可以满足对文物扫描的要求,同时也很容易使用,并且更加便宜易实现。
1 物体特征有效提取
物体特征有效提取计算的整个过程如图1所示。
该投影图像的宽度为1 024像素,共有256条黑白条纹,投影图像可分为128个条型区域。相应移动的编码模式在经历8次平移后将恢复其初始状态,其中每次向右平移1个像素。平移半周后,两个图像将呈现相对的状态,同时合并的图像可以用来提取子像素的边界[2]。相应移动的编码图像有一个8像素的周期,一个周期可以从0到7划分为8个灰度等级,如图1所示。
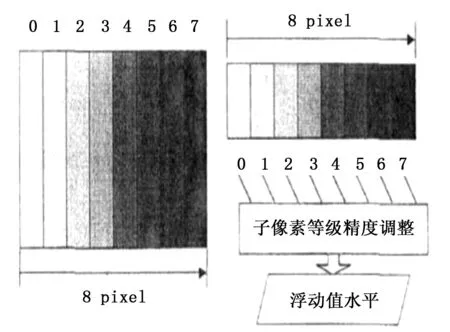
图1 相移编码
相应移动的白色和黑色编码条纹图像具有4个像素的宽度和8个像素的周期,如图2所示。

图2 相移图像
依据所提取的子像素边界左侧内部的灰度图像在图3~6中将一定程度上修正灰度,同时也获得了周期性条纹图案内的对应关系。在8个像素的投影图像中,投影和照片图像之间的关系可以达到子像素精度。图像的周期可以用灰度级来表示,这样将减少不确定性。此对应关系表示图像的任何像素,其对应于一个浮动值,浮动值范围从0到1 024,相当于投影图像坐标系的视界坐标。理论上,投影图像的条纹是整数,并且垂直坐标也是整数,视界坐标应为子像素精度浮动值,但子像素精度浮动值已被变换到条纹的X轴,使得像素坐标成为整数,并且对应的条纹视界坐标为浮动值,这在上图1的图表中都有所显示。
2 离散点三维重建
离散点三维重建的主要目的是为了计算三维坐标中的像素坐标,物体特征有效提取处理的输出数据就是三维重建的输入数据[3]。图中每个像素的坐标和每个像素对应的投影图像坐标的X轴值,在离散点三维重建之后,每个像素的坐标将变换为一个三维空间坐标。
离散点三维重建的计算是基于三角形值域技术的原理,该计算方法的输入数据包括[4]:
(1)照片上像素的参考坐标,nc[n]中的n表示三维重建所需的像素总数量。
(2)投影图像参考坐标的X轴坐标sp[n]对应计算出的像素投影条纹图像,代表cn中第i像素的投影条纹图案的X轴坐标。
(3)照相机和投影机的设置参数。
(4)照相机和投影仪的环境参数。
假设一个空间点M拥有照相机坐标中的Xc坐标,投影仪坐标中的Xp坐标,则Xc和Xp满足如下等式:
Xp=R×Xc+T0
所有的输入数据,离散点三维重建算法的过程如图3所示。

图3 三维重建算法
标准化算法的详细步骤如下所示:
(1)焦距标准化运算。
焦距标准化运算的主要难度是转换照片的参考坐标为相机的参考坐标,坐标转换将十分有助于逆向扭曲运算。根据相机型号的清晰度,逆向扭曲将使相机图像的参考坐标标准化[5]。假设坐标c[n]和点n,相机设定参数作为输入项,nc_nf[n]作为输出项,点n在焦距标准化运算之后,可以由公式如下所示:
nc标准化算法的过程如图4所示。
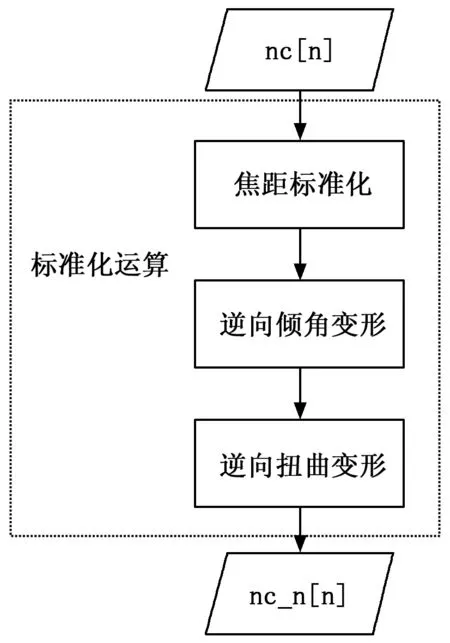
图4 标准化算法
(2)逆向倾角变形运算。
假设输入的nc_nf[n]在焦距标准化运算之后作为点n,输出的nc_ns[n]在逆向倾角变形运算之后作为点n,alpha_c是变形系数[6],该运算可以由方程式如下所示:
焦距和逆向倾角变形运算可以概括为:
其中:K是:
(3)逆向扭曲变形运算。
在焦距标准化和逆向倾角运算之后[7],坐标nc_ns[n]和照相机的扭曲变形系数KC1、KC2、KC3、KC4和KC5一同作为输入项,输出的nc_n[n]是一个毫米单位的平面坐标。
确定r[n],对于每个元素:
确定k_radial[n],对于每个元素:
k_radial[i]=1+kc1×r[i]2+
kc2×r[i]4+kc5×r[i]6
确定dx[n],对于每个元素:
逆向扭曲变形运算的过程为如下方程式所示:
上述列举的所有运算之后,投影条纹图像sp[n]的焦距也应被规定为:
基于照相机和投影仪的环境参数,相机参考坐标中点n的坐标为:
Xc[i]=[uni×zcivni×zcizci]T
在其中:
到此照相机参考坐标的计算已经完成,在整个计算过程中,仅照相机图像的扭曲和倾角被仔细推敲过,而投影仪的没有。虽然最终的坐标包含照相机的扭曲和倾角的系数,但逆向扭曲和倾角运算不能被完成,因为只能获取X轴坐标sp[n][8]。因此,获得了一个在sp[n]的投影中没有扭曲或倾角的假设。在现实中,这种假设将无法实现,特别是投影仪的扭曲变形[9]。因此,需要一个重复演算的过程,包括投影机的扭曲参数,以减少计算的偏差,重复演算的过程示于图5所示。

图5 三维坐标重复演算的过程
3 测试结果与分析
3D扫描系统原型的设置,如图6所示。
本文中的3D扫描仪的最初设计是为了扫描小型文物,在精密度上与InSpeck 3D扫描设备相比效果不足。3D扫描物体特征有效提取和离散点三维重建的计算结果于图6所示。
从图6中可以看出,该物体的细节已被很好扫描。图中文物上部是铜制的,底部则是由玉制的,结果验证了本文所提出的方法与计算在扫描不同材料方面,可以得到广泛的应用。同时,验证了针对数字化计算机建模所需的特征点提取问题,提出了基于投影光编码技术的3D扫描仪原型系统,以及离散点三维重建的计算是基于三角形值域技术的原理,进而有效地提高了特征点提取的准确性;且通过实验分析表明,对于不同外观造型的物体,离散点算法得到的特征点能够和物体的关节点相一致,符合人类的视觉感知的一般性。
目前算法只是验证了照相机和投影仪测量的方法,而没有考虑到扫描得到的三维数据后期使用可能出现的一些问题,如:由于扫描过程中,可能出现物体特征局部遮挡,重叠点近似等问题。此类问题极有可能使最后扫描结果出现偏差,导致数据不完整。因此,针对此点的方法弥补及算法更新,将是后续研究的一个重要方向。

图6 3D扫描系统原型的结构
4 结论
照相机和投影仪测量是3D扫描原型系统的关键技术,其中重点在于计算编码光图像参数的详细步骤,在获取所述编码光图像后,提出了如何分析图像和解码编码图像,同时将三维重建算法和标准化运算的步骤做出了详细的介绍,并且通过实践测试了3D扫描仪原型系统的理论体系,其中包含物体特征有效提取和离散点三维重建的计算,得出基于3D扫描的结果,所述原型系统在细节识别和扫描材料的适应性上,完全展示出了其强大的扫描功能[10]。
原型系统的下一个发展过程是优化计算,以减少扫描时间,同时物体特征有效提取计算也需要被优化,以减少扫描时的噪声,这些都是目前3D扫描技术下一阶段的主要研究内容。
[1] 李秀秀,郑江滨,张艳宁.一种新的自动图像配准技术[J]. 计算机应用研究,2008(1):290-291.
[2] 潘 翔,章国栋,陈启华.三维可变形物体的特征点层次提取[J].计算机科学,2014(4):292-296.
[3] 袁 满,袁志华.一种基于行列法离散点边界搜索算法[J].计算机应用研究,2010(11):4130-4132.
[4] 周 杰,邱运春,黄弋钊.一种新的邻域搜索特征点匹配算法[J]. 兰州理工大学学报, 2016(3):102-106.
[5] 栗国华.三维激光扫描技术大比例尺数字测图应用研究[D]. 西安:长安大学,2015.
[6] 刘云广. 基于地面三维激光扫描技术的变形监测数据处理[D].北京:北京建筑大学,2013.
[7] Schmalz, Christoph, et al. An endoscopic 3D scanner based on structured light[J]. Medical image analysis,2012, 16(5):1063-1072.
[8] Martínez, Jorge L, et al. Construction and Calibration of a Low-Cost 3D Laser Scanner with 360° Field of View for Mobile Robots[Z]. 2015:A25-102-107.
[9] Schweitzer, Wolf, et al. Aspects of 3D surface scanner performance for post-mortem skin documentation in forensic medicine using rigid benchmark objects[J]. Journal of Forensic Radiology and Imaging 2013, 1(4):167-175.
[10] Swaisaenyakorn, Srijittra, et al. Evaluation of 3D animated human model from 3D scanner and motion capture to be used in electromagnetic simulator for body-centric system[A]. Biomedical Engineering and Informatics (BMEI), 2012 5th International Conference on. IEEE[C]. 2014:1255-1260.
Research of A Prototype 3D Scanning System Based on Object Features Active Extraction and 3D Reconstruction with Discrete Points
Niu Xi1,2, Yuan Xiaodong1,2
(1.Zhengzhou Institute of Aeronautical Industry Management,Zhengzhou 450000,China; 2.Aviation Economic Development Cooperative Innovation Center of Henan Province,Zhengzhou 450000,China)
Based on the development of 3D scanning technology in the near future, as well as on the urgent needs of the subject characteristics of effective extraction, through the method of camera and projector measurement system and calculation, using the discrete 3D reconstruction algorithm and standard algorithm are analyzed in detail, as the key technology of 3D scanning system, and further to the 3D coordinates of repeat the calculation process, the practice research and calculation, demonstrates the 3D scanner prototype system of projection light encoding technology based on object feature extraction in effective and discrete points in 3D reconstruction can be used efficiently; at the same time, the use of standardized operation, focal length reverse angle deformation calculation, reverse distortion calculation of three methods, comprehensive discussion the content related to the object feature extraction and effective discrete point reconstruction process, the prototype system to the real cultural relics sweep test.The prototype system can be used for different materials, different kinds of objects, and can effectively carry out the research results of digital object recognition.
3D scanner; object features; active extraction; discrete points; 3D reconstruction
2016-11-08;
2016-12-15。
2016年河南省高等学校重点科研项目(16A590002);2016年河南省科技攻关项目(16GX504)。
牛 晰(1985-),女,讲师,硕士,主要从事工业设计、计算机应用方向的研究。
1671-4598(2017)05-0158-04DOI:10.16526/j.cnki.11-4762/tp
TH
A
