弹丸滚转角速度测量系统的设计与实现
2017-05-13刘宇伦杨新民王胜红
刘宇伦,杨新民,王胜红
(1.南京理工大学 江苏 南京210094;2.淮海工业集团 山西 长治 046000)
弹丸滚转角速度测量系统的设计与实现
刘宇伦1,杨新民1,王胜红2
(1.南京理工大学 江苏 南京210094;2.淮海工业集团 山西 长治 046000)
为了实现弹丸在飞行过程中的姿态测量,设计一种低成本、小体积的滚转角速度测量系统。该系统主要使用地磁传感器获取地磁在其3个正交轴上的分量,经过放大放大、滤波与实时的零偏校正处理,进而根据所检测到的地磁数据的变化解算出滚转角速度。并经理论推导了地磁滚转角速度测量弹体滚转角速度的可行性,并给出了适用条件与局限性。通过实验验证,该方法能在一定的条件下够测得相对精准的滚转角速度,并使得测量系统的体积、重量和成本降低。
姿态测量;滚转角速度;地磁传感器;弹丸
目前,随着对弹药射击精度要求的提高,准确地测量弹体的姿态数据问题对弹箭精确制导的重要性由此凸显。弹箭姿态测量常用的传感器如陀螺仪、加速度计、磁阻传感器等已被广泛应用,并且在理论与实际上都有较高的发展水平。但是惯性测量元件由于炮弹膛内不上电、高过载、低成本、小体积等问题,其应用收到了一定的限制。利用磁阻传感器由于其成本低、体积小、抗过载等特点,测量弹体滚转姿态的方法已经在工程上实现并实际应用[1-3]。
而地磁场信号较弱,易受干扰,产生零偏误差,补偿此误差一般采用椭圆矫正的方法[4],但椭圆矫正仅在系统初始化时完成,无法在系统运行时实时补偿,因此依据弹丸飞行过程中的特点,设计了可实时校准零偏误差的滚转角速度测量系统,并经实验验证,在一定条件下可以精确测量滚转角速度。
1 滚转角速度测量模块的基本原理
滚转角速度的测量是依靠一个3轴磁阻传感器实现[5]。假定磁阻传感器的Xm、Ym、Zm3个敏感轴与弹体坐标系Xb、Yb、Zb重合。地磁场向量为B在弹体坐标系下的分量为Bbx、Bby、Bbz,在导航坐标系下的三轴分量大小分别为Bnx、Bny、Bnz。如图1所示[2-3]。
由此可推算出磁阻传感器的滚转角速度:

根据导航坐标系相互转换关系可得:


将(2)(3)带入(4)并整理,可得

2 转角速度测量模块硬件设计
文中所采用的磁阻传感器为霍尼韦尔公司生产的HMC1053高精度磁阻传感器,其输出量为-4 mV至4 mV的模拟电压信号,经过放大器将其弱信号放大,将调整后的信号作为ADC的输入信号,得到SPI接口形式的数字信号传输到弹载计算机。弹载计算机解算出零偏值大小,通过零偏补偿电路修正偏置值,构成闭环反馈。硬件设计结构框图如图2所示。

图2 滚转角速度测量结构框图
2.1 电源电路
电源部分将模拟电源与数字电源隔离。对于模拟电源,由于磁阻传感器对电源精度与纹波干扰要求较高,因此采用低噪声的REG103-5线性稳压器;放大器所需的正负5 V电源分别由REG103-5线性稳压器与TPS6735反向DC-DC转换器提供。对于数字电路部分。模数转换器、数字电位器等的3.3 V数字电源,由TLV1117-33降压稳压模块将5 V输入电压降压稳压后提供。零偏补偿电路中DCP所需的-2.5V电源则由TPS72325将-5V电压降压稳压后提供。
2.2 磁阻传感器
磁阻传感器是基于各向异性磁阻效应的惠斯通电桥结构,磁阻材料的电阻值随着磁场方向变化,通过电桥测量出磁场的变化量,转化为差分电压信号[7]。
霍尼韦尔HMC1043型磁阻传感器是一种用于测量磁场的惠斯通电桥装置。在向电桥供电时,传感器把传感轴方向的入射磁场强度转换成差动电压输出。除了电桥电路外,传感器还有两个芯片内磁耦合的接线条,偏置条和设置/重置条,用于入射磁场调整和磁畴调准[11-14];从而取消了传感器周转布置定位线圈的需要。磁阻传感器由镍铁导磁合金的薄膜组成,薄膜熔敷在硅片上并形成电阻片元件的样式。有磁场存在时,电桥电阻元件的变化致使电桥输出端之间的电压有相应的变化。这些电阻元件排列在一起有一个公共的传感轴,传感轴在传感方向的磁场增强时提供正电压变化。由于输出仅与一维轴及其量级成比例变化,因而使另外安置在正交方向上的传感器电桥可正确测量任意的磁场方向。
HMC1053三轴磁阻传感器由于其封装小、成本低、磁敏感度强等优势,非常适合测量地球磁场。其主要参数如表1所示。

表1 HMC1053主要参数
由于外界干扰磁场的存在,磁阻传感器需要周期性调节磁阻元件的磁畴[6-15],如果向S/R条加入正脉冲电流,则正磁场在电桥输出端产生的电压为正电压,反之则产生负电压。本设计采用向S/R条周期性加入500 mA正脉冲电流的方式调节磁畴,使之对准易磁化轴的正向,以达到在不失精度的情况下达到快速校正磁畴的效果。
2.3 信号放大电路
本设计采用HMC1053磁阻传感器灵敏度典型值为1.0 mV/V/gauss,电桥偏置的典型值为0.5 mV/V,供电电压为5 V,地磁场强最大约为625 mGauss,则每个电桥在最大地磁场激励的输出值可能为:

电桥输出端的偏置电压为:

因此电桥总输出为:

加入30%的冗余值,假设磁阻传感器的最大输出为8 mV,并且有2.5 V共模电压。因此需采用高共模抑制比,最大增益大于500的放大器。
AD8211是一款高压、精密分流放大器,设定增益为20 V/V,在整个温度范围内的典型增益误差为±0.35%。缓冲输出电压可以直接与任何典型转换器连接。无论是否采用5 V电源供电,从-2 V至+65 V均具有出色的共模抑制性能。AD8211在分流电阻上执行单向电流测量,适合各种工业和汽车电子应用,如电机控制、电磁阀控制或电池管理等。该器件采用特殊专用电路,以保证在0 mV至250 mV整个输入差分电压范围内均可以获得线性输出,无论是否存在共模电压。AD8211的工作温度范围为-40°C至+125° C,采用5引脚小型SOT封装。其特性如表2所示。
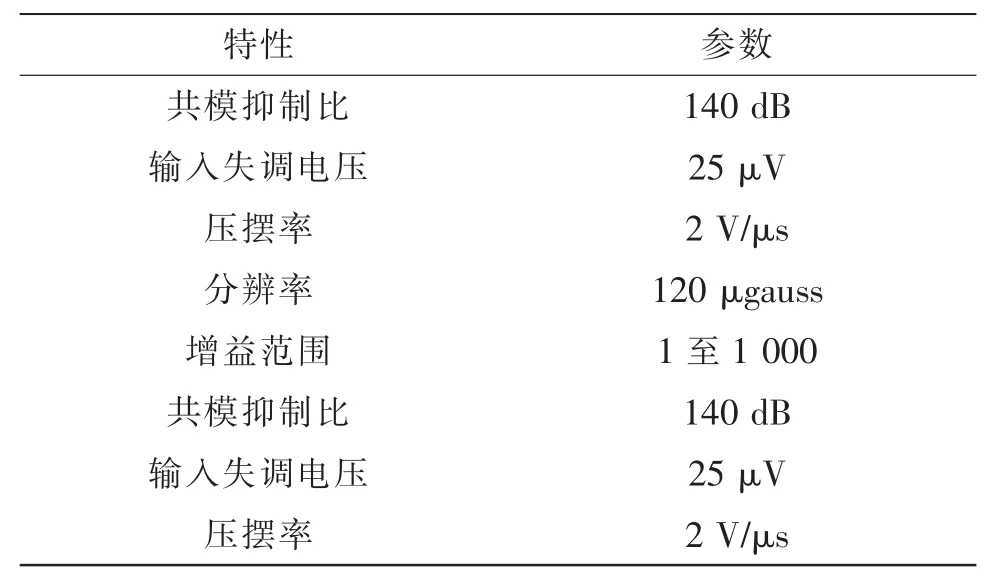
表2 AD8221主要参数
该运放可使用一个电阻调节器增益系数,放大器的传递函数为:G=1+494 kΩ/RG。选取放大倍数为500倍,则计算结果Rg=99.8 Ω,因此选择100 Ω电阻作为放大增益电阻。其放大电路如图3所示。

图3 一路放大电路
2.4 偏置补偿
对于磁阻、运放与外界干扰等产生的偏置信号,可以采取在运放基准输入端进行补偿。系统在前一时间段采集弹丸滚转时地磁场在两个轴上的分量的最大值与最小值,结合运放放大倍数、地磁传感器灵敏度计算出补偿该偏置的数字电位器的游标位置,并将数字电位器的输出量作为运放的基准值,补偿偏置量。
数字电位器采用AD5204,4通道、255位电位器。改变电位器阻值大小是通过将11位串行数据字送入SDI引脚,写入相对应通道的寄存器来实现的。
2.5 模数转换电路
模数转换器采用ADS8688,8通道16位逐次逼近型ADC,采用5 V模拟电源供电,其输入范围为双极10.24 V、5.12 V与2.56 V。片上集成4.096 V基准电压,信噪比为92 dB,功耗低至65 mW,并采用SPI数字接口通讯。其外围电路简单,封装体积小,功耗低等特点,非常适用于弹载滚转角速度测量系统。其转换速率为500 kSPS。若对地磁输出信号采用2路通道自动扫描模式,则有每一通道有250 K的采集速率。采集速率与弹体滚转角速度测量精度的公式为:

通过公式(10)计算得出此采集速率在滚转角速度为694转/秒时精度仍可至少达到1°。输入通道使用10 KΩ电阻与104电容组成的RC低通滤波器将高频干扰信号滤除。
3 误差分析
3.1 磁阻传感器引起的误差
假设地磁场强度为600 mGauss。参阅HMC1053磁阻传感器的手册,其与误差相关的性能参数如表3所示。

表3 HMC1053误差

由式(11)计算出磁阻传感器产生的测量角度误差为0.027°
3.2 放大器、AD转换引起的误差
磁阻传感器HMC1053每一单轴测量地磁场的最大输出值输为8 mV,此微弱信号必须经运放放大后才能由A/D转换器量化。通过参阅AD8221技术手册中该运放的线性度误差、温漂误差,通过计算得出放大器工作在最大增益G=1 000状态时产生的角度测量误差最大值为0.054°
A/D转换器ADS8688的分辨率为16位,其量化误差为0.02%FSR,积分非线性误差为0.75 LSB。其产生的角度测量误差最大值为0.012°
综合上述误差分析,该滚转角速度测量系统的精度主要取决于放大电路的误差水平[6-8]。整个系统器件产生的误差为0.062°。
4 实验与数据分析
将该滚转角速度测量系统固定于弹体内,并进行实弹飞行测试。炮弹飞行过程中稳定平台跟随滚转角速度测量系统测量的滚转角速度,以保持其在惯性空间内的稳定状态。在弹体绕轴旋转时,地磁场强度矢量在传感器XY敏感轴上的分量是正弦变化的[7]。图4为炮弹飞行过程中,一段时间内地磁传感器经实时校正后XY两敏感轴所测的地磁分量大小。
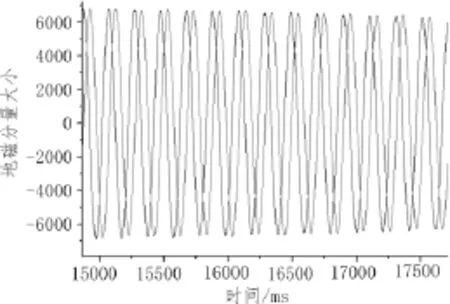
图4 飞行过程中地磁分量
图5为弹丸飞行过程中该滚转角测量系统所测量的滚转角速度。

图5 飞行过程中的滚转角速度
由此可见,磁阻传感器测量弹体滚转角速度的方法是可行的,并且可以比较准确的测量滚转角速度。
5 结 论
本论文针对弹体滚转角[16-17]速度测量系统进行设计,以磁阻传感器HMC1053为主要器件完成了整个测量系统的设计。通过理论证明磁阻传感器在一定条件下可以测量弹体的滚转角速度,同时该方法存在一定的局限性。设计了系统的硬件电路以及偏置补偿方法。分析了弹体滚转角速度测量系统的误差。经过实验结果证明,校正后的滚转角速度零偏基本消除,测量精度能够满足要求。
[1]郭才发,胡正东,张士峰,等.地磁导航综述[J].宇航学报,2009(4):1314-1319,1389.
[2]蔡洪,郭才发,胡正东.惯性/地磁组合导航算法[J].中国惯性技术学报,2009(3):333-337.
[3]刘昕.舰炮制导炮弹姿态测量方法研究[J].装备制造技术,2015(1):77-78.
[4]史金光,韩艳,刘世平,等.制导炮弹飞行姿态角的一种组合测量方法[J].弹道学报,2011(3):37-42.
[5]李玎,赵成刚,卜雄洙.基于磁传感器组合的高旋弹横滚角测量方法[J].南京理工大学学报:自然科学版,2009(3):320-324.
[6]李艳,管斌,王成宾,等.电子磁罗盘航向角误差推导及分析[J].仪器仪表学报,2013(7):127-133.
[7]王丽颖,支炜,孙红霞,等.基于HMC1022磁阻传感器的数字电子罗盘的设计与实现[J].电子测量技术,2009(1):108-111.
[8]龙达峰,刘俊,张晓明,等.地磁导航中磁测姿态解算误差分析[J].科学技术与工程,2015(6):204-209.
[9]高峰,张合,程翔,等.弹道修正引信中的地磁信号及其抗干扰研究[J].弹道学报,2008(4):45-48.
[10]李镇,王海涌,靳宇航,等.一种弹道导弹捷联惯导/地磁组合导航方法[J].中国惯性技术学报,2015(5): 636-641.
[11]鲍松堂.磁阻传感器及其在飞行体姿态测试中的应用[J].五邑大学学报:自然科学版,2010(2):52-55.
[12]朱荣华,林新华,孔德义,等.三维磁阻式电子罗盘的研制[J].传感器与微系统,2010(12):102-104.
[13]唐玉发,张合,刘建敬.基于磁阻传感器与加速度计复合的姿态角检测技术 [J].传感器与微系统,2013(1):56-58,62.
[14]苟秋雄,刘明喜,李虎军.基于磁阻传感器的末制导迫击炮弹滚转姿态初始对准技术研究[J].弹箭与制导学报,2008(3):45-48.
[15]刘晓娜,马铁华,范锦彪.基于磁阻传感器的微型姿态测试电路[J].微计算机信息,2008(22):169-170.
[16]尚煜,张江华.基于外辐射源照射的弹体滚转角测量技术[J].电子科技,2014(3):99-101.
[17]王可宁,张雄星,田建平.双加计与MEMS速率陀螺仪融合的滚转角测量算法[J].西安工业大学学报,2016(9):726-729.
Design and realization of roll angular speed measurement system for projectile
LIU Yu-lun1,YANG Xin-min1,WANG Sheng-hong2
(1.Nanjing University of Science&Technology,Nanjing 210094,China;2.HuaiHai Industry Group,Changzhi 406000,China)
A low-cost small-size roll angular speed measurement system is designed mainly for getting the attitude of the projectile.The system using magnetic sensor to measure the geomagnetism.The roll angular speed can be calculated when the signal is amplified,filtered and bias corrected.The feasibility of the roll angular speed measurement system is proved through theoretical derivation,and the applicable conditions and limitations are given out.Experiments shows this method can get accurate roll rate under certain conditions,and the cost and size are reduced.
attitude measurement;angular speed;magnetic sensor;roll projectile
TN98
A
1674-6236(2017)09-0092-04
2016-04-09稿件编号:201604084
刘宇伦(1990—),男,山东威海人,硕士研究生。研究方向:惯性导航技术。
