探测临近空间高声速目标的飞艇组网方法研究*
2017-05-13杨虹张雅声丁文哲
杨虹,张雅声,丁文哲
(装备学院 a. 研究生管理大队; b. 航天装备系, 北京 101416)
探测临近空间高声速目标的飞艇组网方法研究*
杨虹a,张雅声b,丁文哲a
(装备学院 a. 研究生管理大队; b. 航天装备系, 北京 101416)
为了提高对临近空间高声速目标的探测能力,探讨了一种飞艇红外组网探测系统的设计方法。提出了基于性能和基于效益的2种组网部署原则,设计了飞艇红外探测系统的组网量化指标,建立了飞艇组网系统部署模型,在此基础上设计了基于遗传算法的组网优化算法。仿真结果表明,该方法能够实现满足多种性能指标要求的飞艇红外组网探测系统的优化部署,为临近空间高超声速目标的探测提供了新的思路。
飞艇;红外探测系统;临近空间高声速目标;优化组网;组网原则;性能指标
0 引言
近年来,临近空间高超声速飞行器正成为各国武器研究的热点[1-3]。其速度快、高机动的特点也对防御系统提出了更为苛刻的要求。对于如何进行飞艇红外探测系统的组网部署,提升组网探测系统对临近空间高超声速目标的探测能力,是目前急需解决的难题。
目前,关于飞艇红外系统组网探测方面的研究还比较少,大多数文献都集中在对传统的组网优化部署进行研究。文献[4]针对环形、直线、扇形3类部署方式建立了定量评价指标,为分布式传感器的组网探测提供了依据。文献[5]在充分分析了飞艇对地观测任务的特点后,采用加入了混沌优化的粒子群算法得到了飞艇组网对地观测的最优方案。文献[6] 提出了一种基于遗传算法的临近空间传感器动态组网优化部署方法,并给出了遗传算法的求解步骤;文献[7]提出了一种基于改进的蛙跳算法的雷达组网优化部署方法。文献[8]针对临近空间高超声速飞行器的特点,研究了地基雷达的组网部署,并通过对信息素的引导提高了组网优化部署的效率。
以上研究对于飞艇红外系统探测临近空间高超声速目标的组网设计具有一定的借鉴意义,但飞艇红外系统探测临近空间高超声速目标的组网设计具有其独特的需求。鉴于此,本文提出了基于性能和基于效益的系统组网原则,并针对飞艇红外系统探测临近空间高超声速目标时的覆盖性、重叠性、跟踪性、衔接性、资源利用性等特点构建了组网模型,最后基于遗传算法设计了系统的优化组网算法,为飞艇红外系统探测临近空间高超声速目标的组网设计提供一种新的思路。
1 飞艇红外系统的组网原则
1.1 飞艇红外组网探测系统的优势
临近空间高超声速飞行器的飞行高度一般在20~100 km之间,具有体积小,速度快的特点。其自身RCS较小,在飞行过程中会与大气产生剧烈摩擦,不利于雷达探测[9-11]。相反,由于其快速飞行时会产生强烈的红外辐射特性,使得利用红外系统对临近空间高超声速飞行器进行探测受到越来越广泛的关注和认可[12-15]。
浮空飞艇漂浮在0~20 km的空域范围,相对低廉的成本与良好的性能使其成为目前世界各国关注的焦点。相比于目前的天基、空基、地基探测,飞艇红外探测系统具有其独特的优势:与天基探测方式相比,具有更高的探测精度,可对目标进行稳定跟踪;与空基探测相比,具有更长的驻留时间,成本更低;与地基探测相比,可以克服地域及地球曲率的影响,机动灵活,探测范围更广。飞艇红外组网探测如图1所示。
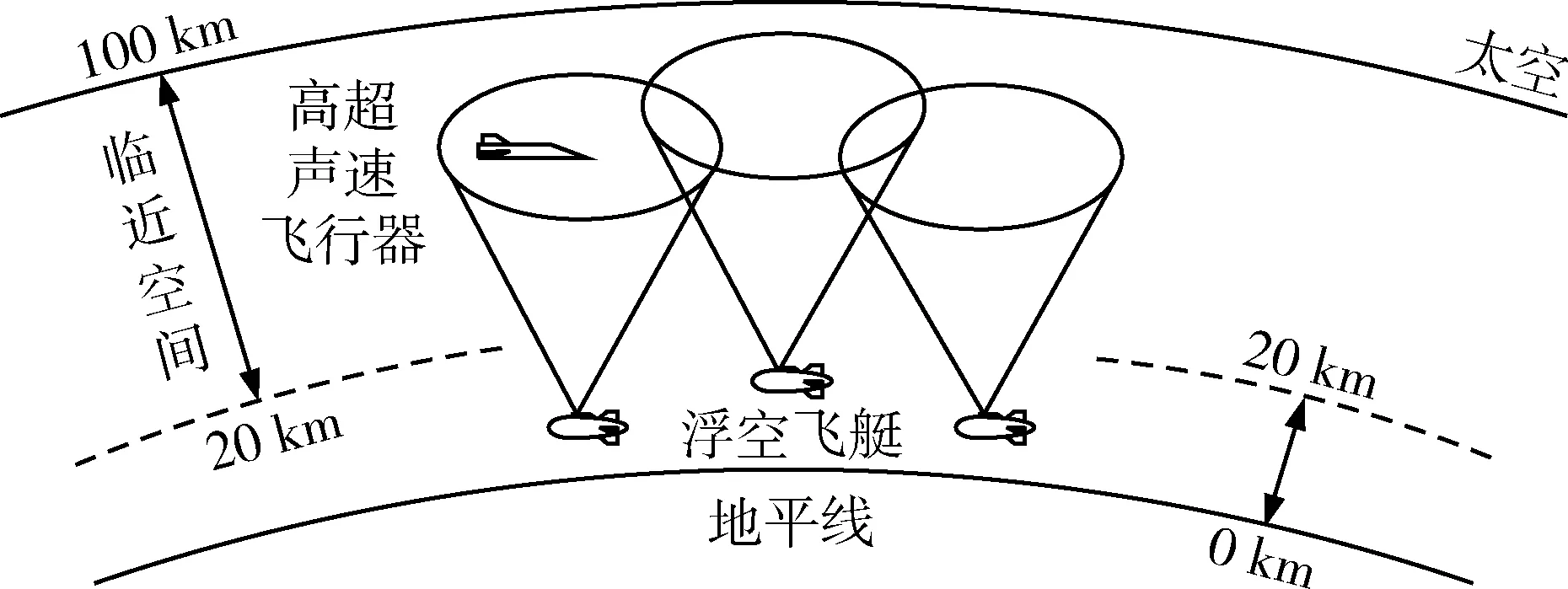
图1 飞艇红外组网探测示意图Fig.1 Schematic diagram of airship Infrared detection network
1.2 飞艇红外探测系统的组网原则
飞艇红外系统探测临近空间高超声速目标的组网问题实际上是多边形间的覆盖问题:根据来袭目标的可能发射区域以及目标威胁区域,确定探测区S,考虑重点设施所在位置,确定重点探测区Sa。对于不同类型的红外探测器,设其在第h高度层的探测范围为Sih。
定义飞艇红外组网探测系统对探测区域的覆盖率α为所有红外探测器在探测区内的探测面积(重叠区只考虑一次)与探测区面积的比值,表示为
(1)
式中:n为飞艇个数。
定义飞艇红外组网探测系统对探测区域的重叠覆盖率β为所有红外探测器在探测区内的重叠探测面积(存在2部红外探测器以上覆盖的区域)与探测区面积的比值,表示为
(2)
这样就使得问题变为优化问题,将飞艇红外探测系统的组网原则分为2类:
(1) 基于性能考虑的组网方式
对于给定数量的浮空飞艇,使组网系统的覆盖率α以及重叠覆盖率β趋于最大,这样会使得系统对探测区域的覆盖程度更好,衔接更加紧密,从而提高飞艇红外探测系统对探测区域的探测性能。
(2) 基于效益考虑的组网方式
寻求效益最高的组网方式时,首先使组网系统的覆盖率α趋于最大,重叠覆盖率β趋于最小,找到符合限制要求的最少飞艇组网部署方案后,重新调整部署方案使系统重叠覆盖率β趋于最大,这样会使组网系统所需飞艇数量较少的同时,探测区覆盖率及重叠率较大,从而保证系统效益的最大化。
2 飞艇红外探测系统的组网量化指标及部署模型
2.1 飞艇红外探测系统的组网量化指标
飞艇红外探测系统的组网量化指标主要包含探测区覆盖率、重点探测区覆盖率、资源利用率、水平衔接系数、衔接高度:
(1) 探测区覆盖率α
探测区覆盖率描述的是飞艇红外组网探测系统的探测能力,即飞艇红外组网探测系统在探测区的有效覆盖范围大小。对于组网系统来说,在探测阶段,必须满足对探测区域保持一定的覆盖率,才能满足平时的态势感知要求。
(2) 重点探测区覆盖率φ
重点探测区覆盖率φ表示,飞艇红外组网探测系统在重点探测区内的探测面积(重叠区只考虑一次)与重点探测区面积的比值,表示为

(3)
在临近空间高超声速目标来袭时,很大程度上会瞄准重点设施所在区域进行攻击。这样飞艇红外组网探测系统对于重点探测区的覆盖率就必须要达到更高的标准。
(3) 资源利用率τ
资源利用率τ表示:在探测区内,除去飞艇红外组网探测系统中3部以上红外探测器重叠探测部分的面积与探测区面积的比值,表示为

(4)
在探测区内,飞艇红外组网探测系统中覆盖同一区域的红外探测器数量越多,则在受到打击时,组网系统的探测性越强,但2部飞艇的覆盖就足以保证组网系统的容错率,过多的冗余会造成资源浪费,也会使得组网系统对于整个探测区的总覆盖率降低。
(4) 水平衔接系数k
水平衔接系数k表示:在h高度层上,飞艇红外组网探测系统中相邻两部红外探测器之间的最大重叠距离dhmax与2部红外探测器平均探测距离的比值,如图2所示。
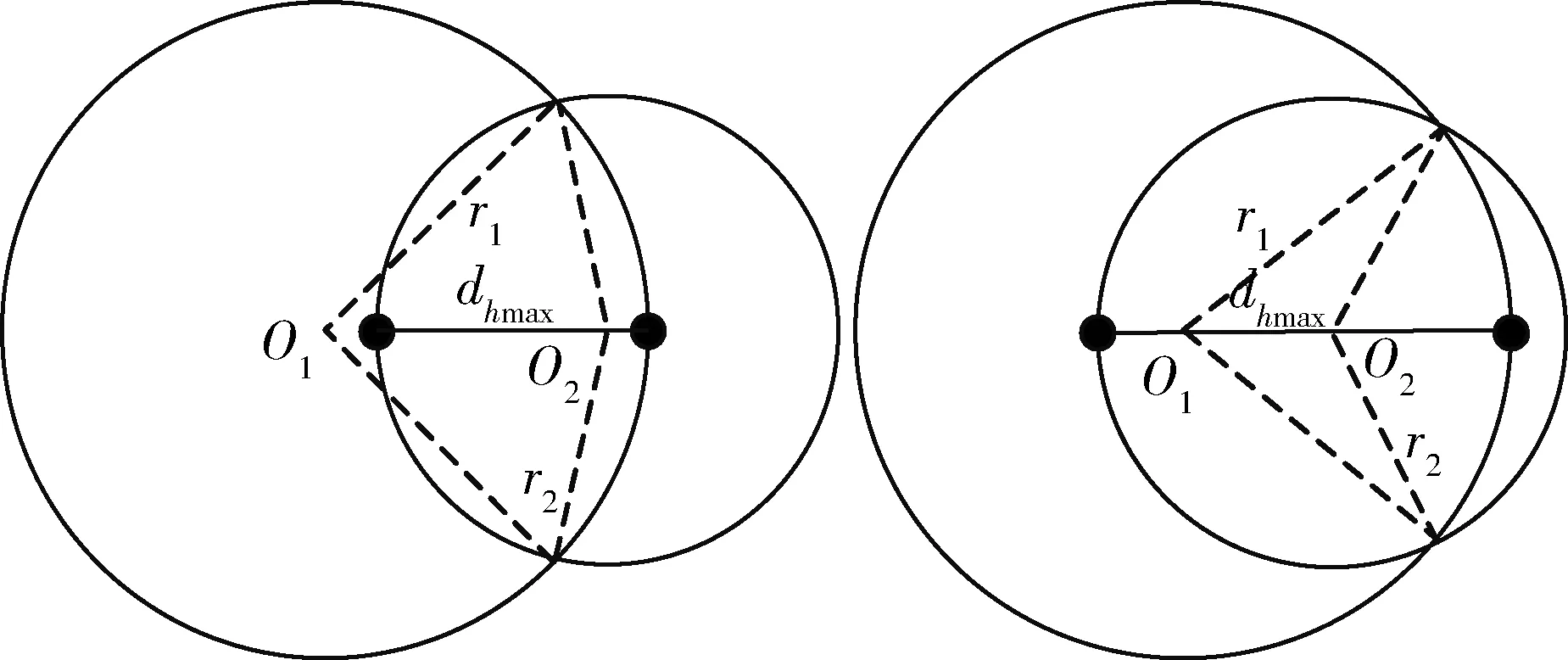
图2 水平衔接系数示意图Fig.2 Schematic diagram of horizontal convergence coefficient of adjacent infrared detectors
定义水平衔接系数k为
k=2dhmax/(r1+r2).
(5)
当飞艇上的红外探测器对目标进行探测定位时,由于红外探测器存在探测周期,探测定位时需要有一定的反应时间,为了保证与上一探测器在探测区域上保持探测衔接,则飞艇红外组网探测系统中红外探测器与相邻红外探测器之间的重叠距离dhmax需满足dhmax≥d0。其中d0由3点快速航迹起始法限定,d0≥3vT(v为高超声速目标速度,T为红外探测器的探测周期)。
(5) 衔接高度H
红外探测器在不同高度层上对应的最大探测距离不同,当探测高度为h1时(h1∈[h1min,h1max],h1min,h1max为红外探测器的极限探测范围),对应的红外探测器最大探测距离为dh1。在某一高度层H上,相邻两红外探测器的最大探测距离分别为dH1,dH2,当dH1与dH2之和的大小等于两探测器之间的距离dH时,即dH1+dH2=dH时,称该高度H为相邻红外探测器的衔接高度,如图3所示。
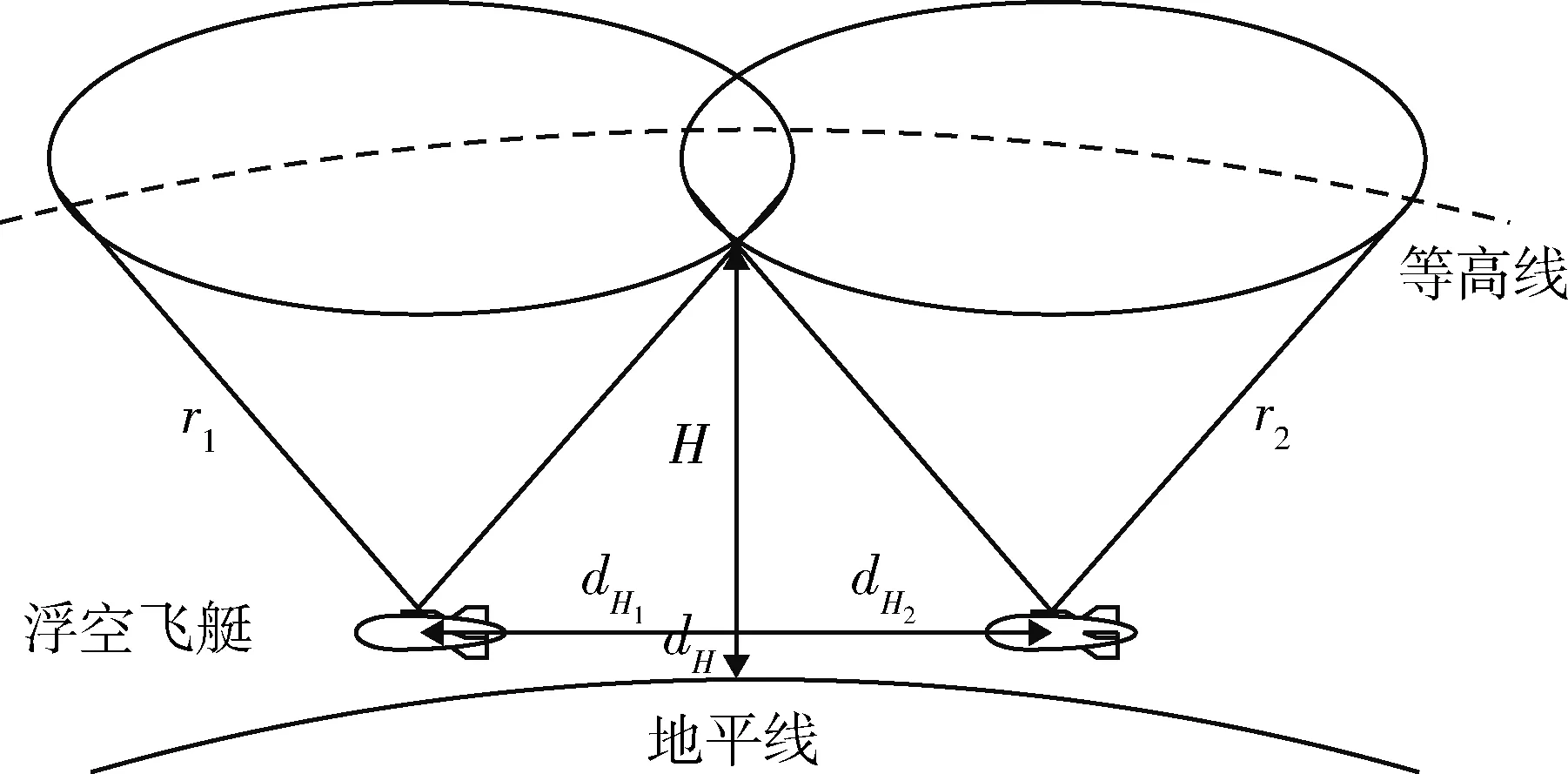
图3 衔接高度示意图Fig.3 Schematic diagram of convergence height of adjacent infrared detectors
临近空间高超声速飞行器的特点是可以在各个高度层内进行跳跃飞行,因此为了保证飞艇红外组网探测系统具有良好的衔接性,本文以高超声速飞行器的最低飞行高度作为衔接高度的约束。
2.2 飞艇红外探测系统的组网部署模型
在对组网系统部署方案进行实际求解的过程中,想要直接得到绝对优化方案,使方案内各项部署原则均能够达到最优是很难实现的。针对此问题,本文采用目前常用的评价函数法作为一种缓解策略来对问题进行优化求解。
评价函数法的主要思想是对各项目标函数进行分析后,通过构造评价函数,使最终进行部署优化时,可以将多目标函数转化为单目标函数进行求解[16]。而对于评价函数的构造则采用平方加权法进行实现。平方加权法的主要思想是通过权衡各项目标函数在飞艇红外组网探测系统中的重要程度,依据不同的任务要求,给定各项目标函数的权重系数,并分析特定任务下各项目标函数所希望达到的理想函数值,以此求得组网系统部署优化方案的最优解。构造评价函数为

(6)

maxF=ε1(α-1)2+ε2(β-1)2,
(7)
式中:ε1+ε2=1;α,β的理想值为1。
针对1.3节中基于效益考虑的组网原则(即求取maxα,minβ)在目标高度层上,构建评价函数为
maxF=ε1(α-1)2+ε2β2,
(8)
式中:ε1+ε2=1;α,β的理想值分别为1,0。
在寻得符合约束条件的最少飞艇数量后,按式(7)重新寻求飞艇组网部署方案,使组网系统效益最大。
综合考虑2.1节中提出的5项组网量化指标,列出飞艇红外组网探测系统部署模型的约束条件如下:

(9)
式中:α0,φ0,τ0,k0为组网系统所需达到的最低要求;H0为衔接高度约束常值。
其中水平衔接系数指标k与衔接高度指标H实际上是为了保证组网系统中相邻两飞艇红外探测器之间的部署距离同时满足飞艇红外组网探测系统在空间中对横向、纵向衔接覆盖的严密性。则相邻飞艇之间的部署距离约束可以转化为
4.2 预约优选和排序功能 输液时段设计是减少患者等候,均衡工作量的一个关键环节。我们广泛听取患者的意见和建议,总结手工预约的实践经验,常规状态下系统每天设置7个时间段,每50分钟为1个时间段,2个时间段之间有10 min的缓冲期,每个时间段预约50例患者。根据患者喜好和输液高峰时段的情况,系统默认为患者选择最早的时段,其中10:30~11:20时段只留给当日就诊后需要输液的患者预约,也可以根据患者的需求自由选择时间段。系统根据患者预约的先后为每个时段的患者自动排序。智能化的操作非常简便、高效和人性化。这一功能的实现 也是“关爱患者,从细节做起”的体现。
dmax=min[dmax(k0),dmax(H0)],
(10)
式中:dmax为组网系统相邻飞艇之间的最大部署距离;dmax(k0)为组网系统水平衔接系数指标k0所确定的最大部署距离;dmax(H0)为组网系统衔接高度指标H0所确定的最大部署距离。
则约束条件变为
(11)
式中:d为相邻两飞艇之间距离。
3 基于遗传算法的优化组网算法设计
飞艇红外探测系统的组网问题条件复杂,难以用常规解法求得目标的最优解,这时需要寻找一种合适的方法对其进行求解。不同的优化算法各具特点:粒子群算法全局收敛快,但容易陷入局部最优;蚁群算法具有发现较好解的能力,但搜索时间长,容易出现停滞现象;遗传算法搜索时间长,但更好收敛于最优解。本文为了综合考虑,为得到更理想的组网方案,选取遗传算法进行求解。
遗传算法是一种模拟自然界中生物遗传进化的智能算法,它提供了对于求解非线性、多约束等复杂问题的通用解决框架,从而被广泛应用在复杂系统问题的求解上,并取得了良好的效果。
根据探测任务需求、临近空间高超声速飞行器的飞行特性以及飞艇红外探测器的探测性能,对组网系统进行优化方案设计,算法主要流程如图4所示。
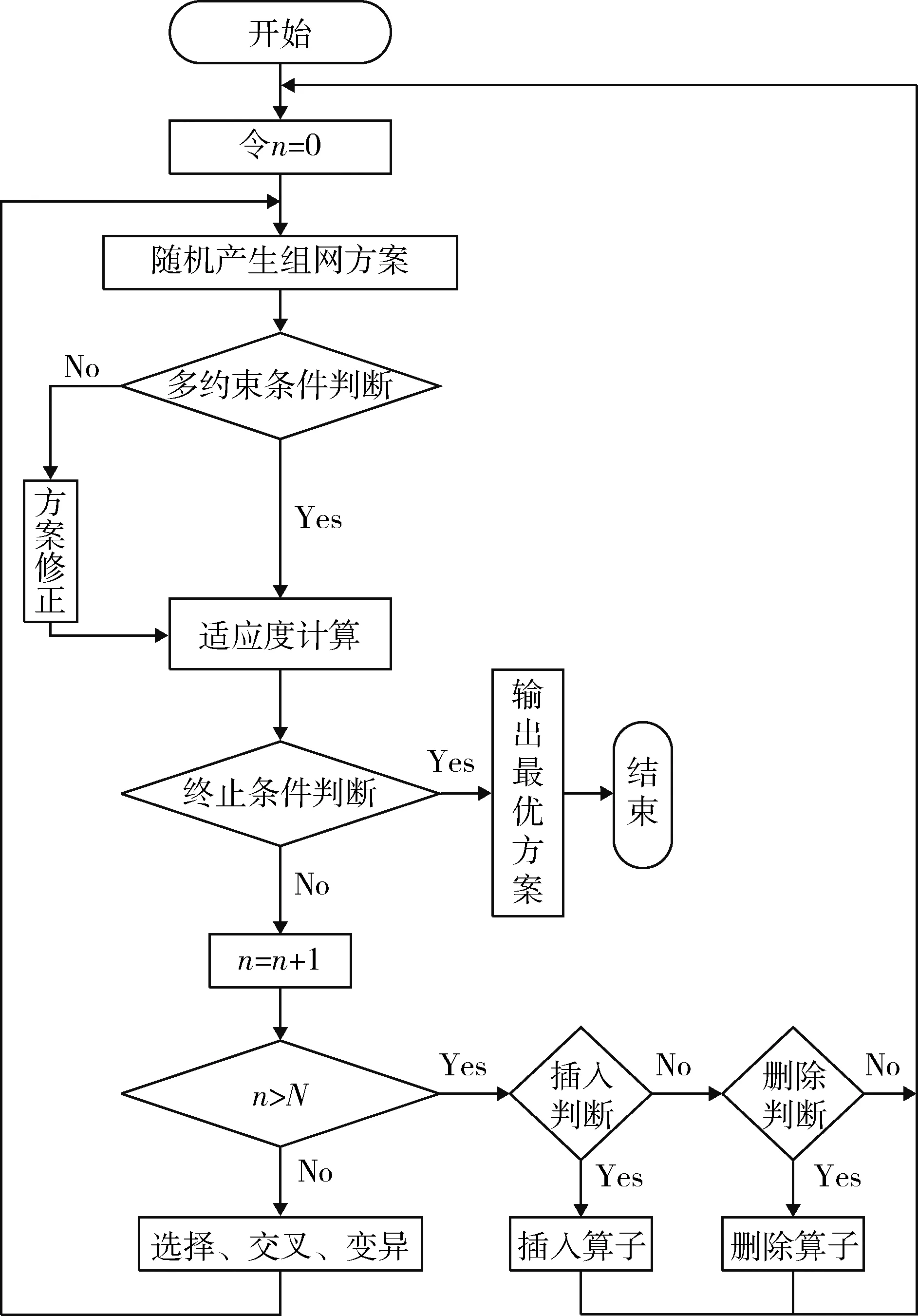
图4 算法主要流程Fig.4 Main procedures of the algorithms
具体步骤如下:
(1) 区域划分
对于指定任务安排进行深入分析,依据临近空间高超声速飞行器的发射范围、可能飞行轨迹以及重点设施所在位置,划分探测区,区域划分如图5所示。
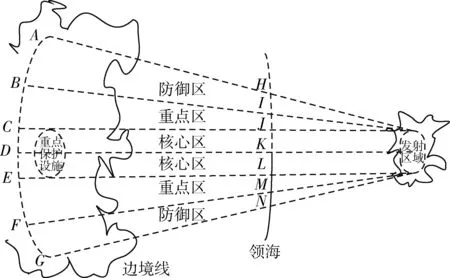
图5 组网区示意图Fig.5 Schematic diagram of detection area
图5中,临近空间高超声速飞行器从发射区域进行发射,途径核心区(J,L,E,C区)最大程度上威胁重点保护设施;考虑到高超声速飞行器的强机动性,扩大核心区范围划分出重点探测区(I,M,F,B区);同时由于一些不可预知因素(如设备故障、飓风、发射误差等)会使飞行器的飞行路线产生偏离,就需要进一步扩大探测范围得到探测区(H,N,G,A区)。领海线则限定了飞艇的放置区域。
(2) 推测飞艇数量
首先根据2.2中式(10)确定飞艇红外组网探测系统中两相邻飞艇之间的最大部署距离,结合任务划分探测区域,推测满足任务指标的飞艇数量。
(3) 飞艇红外组网探测系统初始化
在探测区内,随机生成一组飞艇部署位置,作为组网系统的初始部署方案。
(4) 方案修正
对随机生成的初始部署方案进行约束判断,判断方案是否满足式(11)的约束条件,若不满足约束,则修正方案。
(5) 适应度计算
对满足约束条件的部署方案,计算适应度。
(6) 终止判断
根据适应度计算,判断是否满足终止条件(最优适应度以及平均适应度基本不再变化或者遗传代数达到预定遗传代数),满足终止条件时,输出最优部署方案,结束搜索。
(7) 遗传操作
当计算不满足终止条件时,则进行选择、交叉、变异操作不断迭代。对遗传得到的新方案继续进行约束判断并修正。
(8) 插入删除算子
当组网原则基于效益考虑时,由于初始飞艇数量是根据推测得到的,可能得不到合适方案。当迭代达到一定次数仍没有得到最优方案时,则进行插入、删除算子判断,若重叠率较小,而覆盖率仍不满足约束时,增加飞艇数量;若覆盖率、重叠率均满足约束,而重叠率较大时,减少飞艇数量(判断飞艇中最小适应度个体进行删除)。
4 仿真实验
设某型号临近空间高超声速飞行器的飞行速度保持在5Ma,飞行的最低高度为30 km。以飞行器飞行最低高度作为目标高度层进行仿真分析;在组网区域形状的选择上,考虑到实际探测过程中,对于不规则区域的考虑是将其进行填补而构成规则区域(如矩形、方形、圆形等)。对于扩大预警探测范围并不会降低预警探测效果,同时会提升可靠性,所以本文将组网区域设置为矩形。取探测区为7 000 km×7 000 km的正方形区域,重点区为3 000 km×7 000 km的矩形区,位于探测区中心,飞艇部署在20 km高空。
假设在实际环境中,取所有飞艇所载红外探测器型号均相同,且飞艇均布置在本国领海内(探测环境较为理想,不易受敌人干扰),因此可将飞艇红外探测器的探测范围近似为圆。取探测器的探测半径近似为1 782 km,飞艇红外探测器的探测周期T为1.8 min,评价系数ε1,ε2分别取0.7,0.3。
(1) 选择基于性能考虑的组网原则,飞艇数量为9
方案1:探测区覆盖率α0不低于93%,重点区覆盖率φ0不低于95%,资源利用率τ0不低于80%,利用第3节中设计的优化组网算法,仿真得到飞艇组网部署方案,如图6所示。
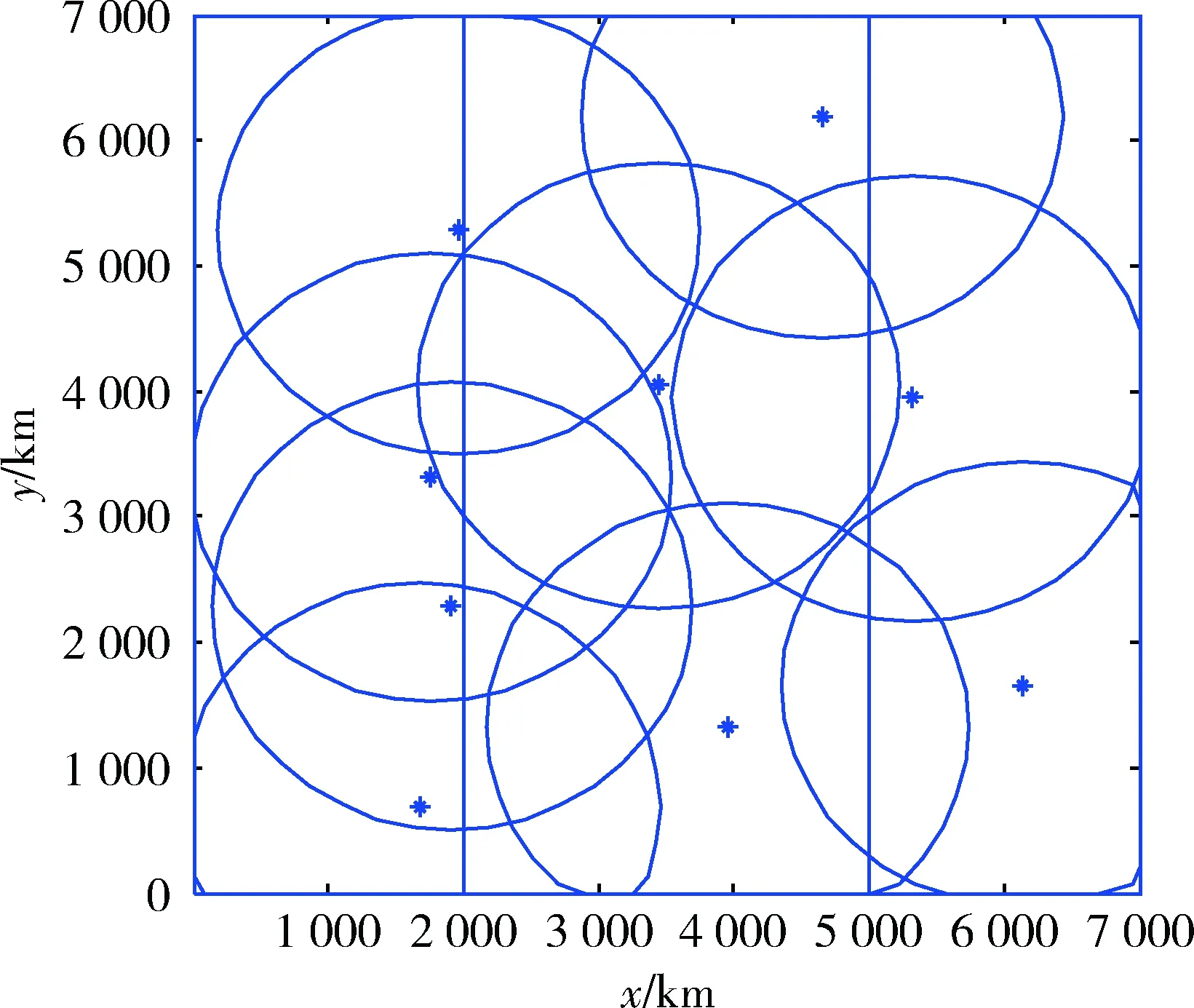
图6 基于性能考虑的飞艇组网部署方案Fig.6 Airship networking deployment scheme based on performance considerations
图6中中心矩形区域为重点探测区。
其中组网探测系统的各飞艇坐标分别为(1 967, 5 283),(6 141, 1 657),(4 650, 6 199),(3 444, 4 045),(3 958, 1 329),(1 671, 688),(5 329, 3 943),(1 764, 3 315),(1 915, 2 287),探测区覆盖率α为94.15%,重点区覆盖率φ为99.69%,重叠覆盖率β为51.98%,资源利用率为81.59%,评价值为0.071 1。相邻飞艇之间最远距离如表1所示。
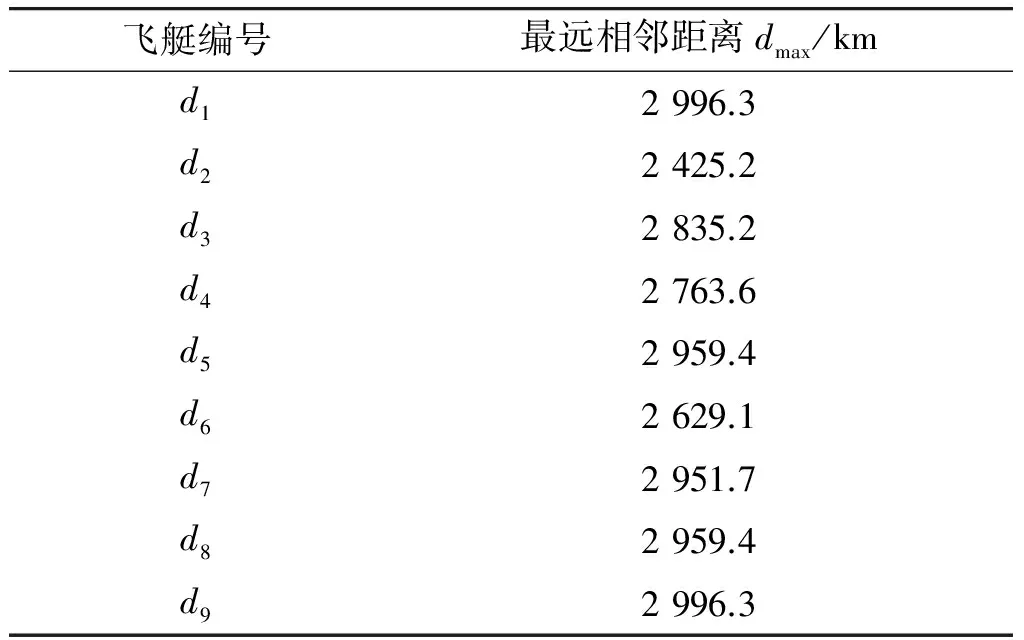
表1 相邻飞艇间最远距离
从以上数据结果可以看出,仿真得到的飞艇组网部署方案性能良好,达到了各项指标要求。
为进一步提升探测区覆盖率,提升资源利用效率,对方案2进行仿真。
方案2:探测区覆盖率α0不低于95%,重点区覆盖率φ0不低于97%,资源利用率τ0不低于85%,仿真得到飞艇组网部署方案,如图7所示。

图7 提升性能指标后飞艇组网部署方案Fig.7 Airship networking deployment after the improvement of the performance index
其中组网探测系统的各飞艇坐标分别为(1 737,951),(1 453,3 600),(1 955, 3 081),(5 986,5 827),(4 146, 2 515),(3 906,5 203),(6 224,3 637),(5 338,946),(1 726,6 036),探测区覆盖率α为98.39%,重点区覆盖率φ为98.67%,重叠覆盖率β为49.63%,资源利用率为87.82%,评价值为0.075 9。相邻飞艇之间最远距离如表2所示。
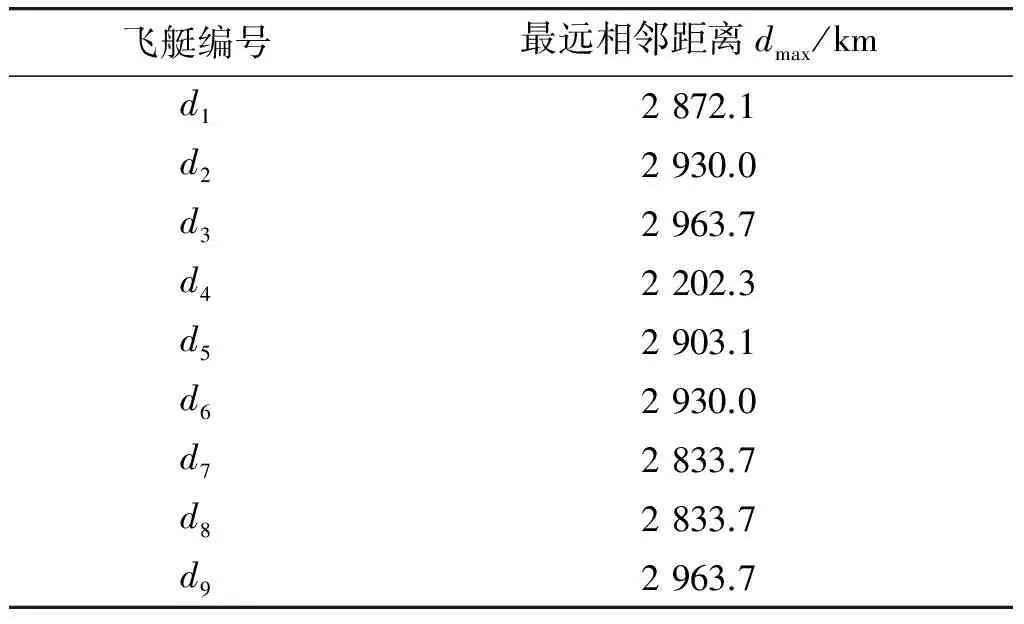
表2 相邻飞艇间最远距离
对比方案1与方案2,可以发现1,2方案两者评价值相差不多,均是较优的部署方案,方案2相比于方案1以重叠覆盖率降低2.35%,重点区覆盖率降低1.02%为代价换取了探测区覆盖率4.24%及资源利用率6.23%的提升。因此在组网部署时,应根据环境情况改变评价系数或限制条件从而得到最适合实际情况的系统部署方案。
(2) 选择基于效益考虑的组网原则
设探测区覆盖率α0不低于93%,重点区覆盖率φ0不低于97%,资源利用率τ0不低于90%,选择式(8)作为目标函数,仿真得到飞艇组网部署方案,如图8所示。
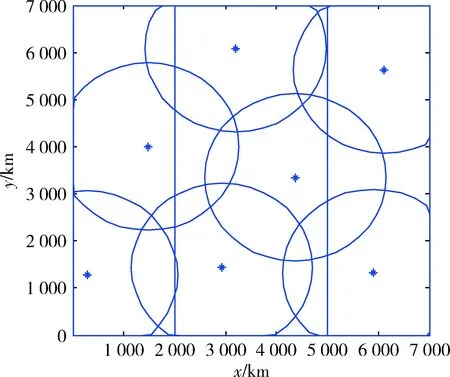
图8 基于效益考虑的飞艇组网部署方案Fig.8 Airship networking deployment scheme based on benefit consideration
由于给定飞艇红外探测器的探测周期较长,对于组网要求较高,得到组网探测系统完成限制条件所需的最少飞艇数量为7,各飞艇坐标分别为(3 202,6 093),(5 902,1 320),(1 476,4 003),(4 365,3 350),(6 117,5 637),(2 932,1 443),(274,1 283),探测区覆盖率α为93.45%,重点区覆盖率φ为99.30%,重叠覆盖率β为23.16%,资源利用率为98.86%,评价值为0.019 1。相邻飞艇之间最远距离如表3所示。
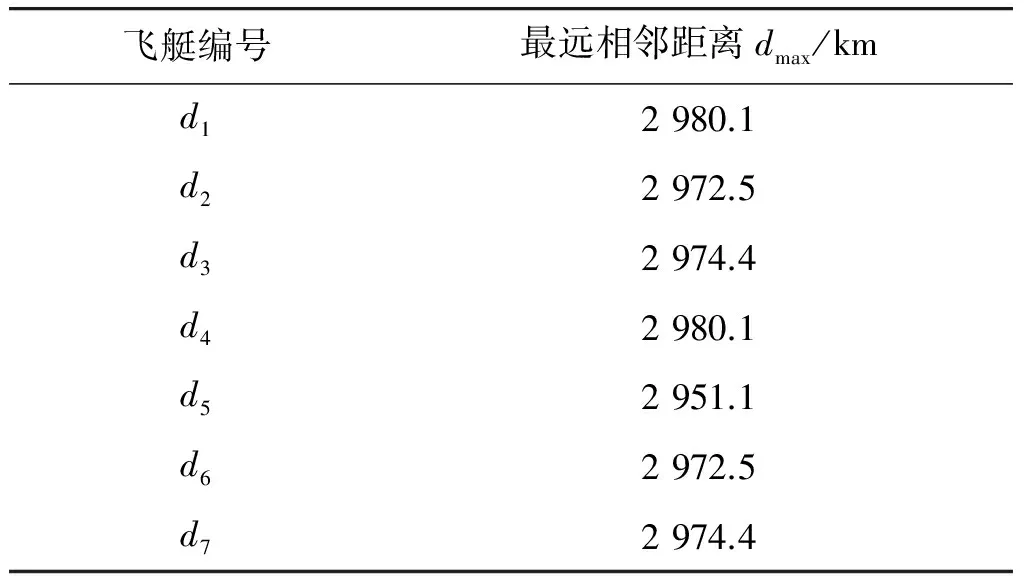
表3 相邻飞艇间最远距离
为进一步提升探测区覆盖率,选择式(7)作为目标函数重新进行组网部署规划,同时考虑到组网系统的探测区覆盖率限制较低,将覆盖限制提升至95%,得仿真结果如图9所示。
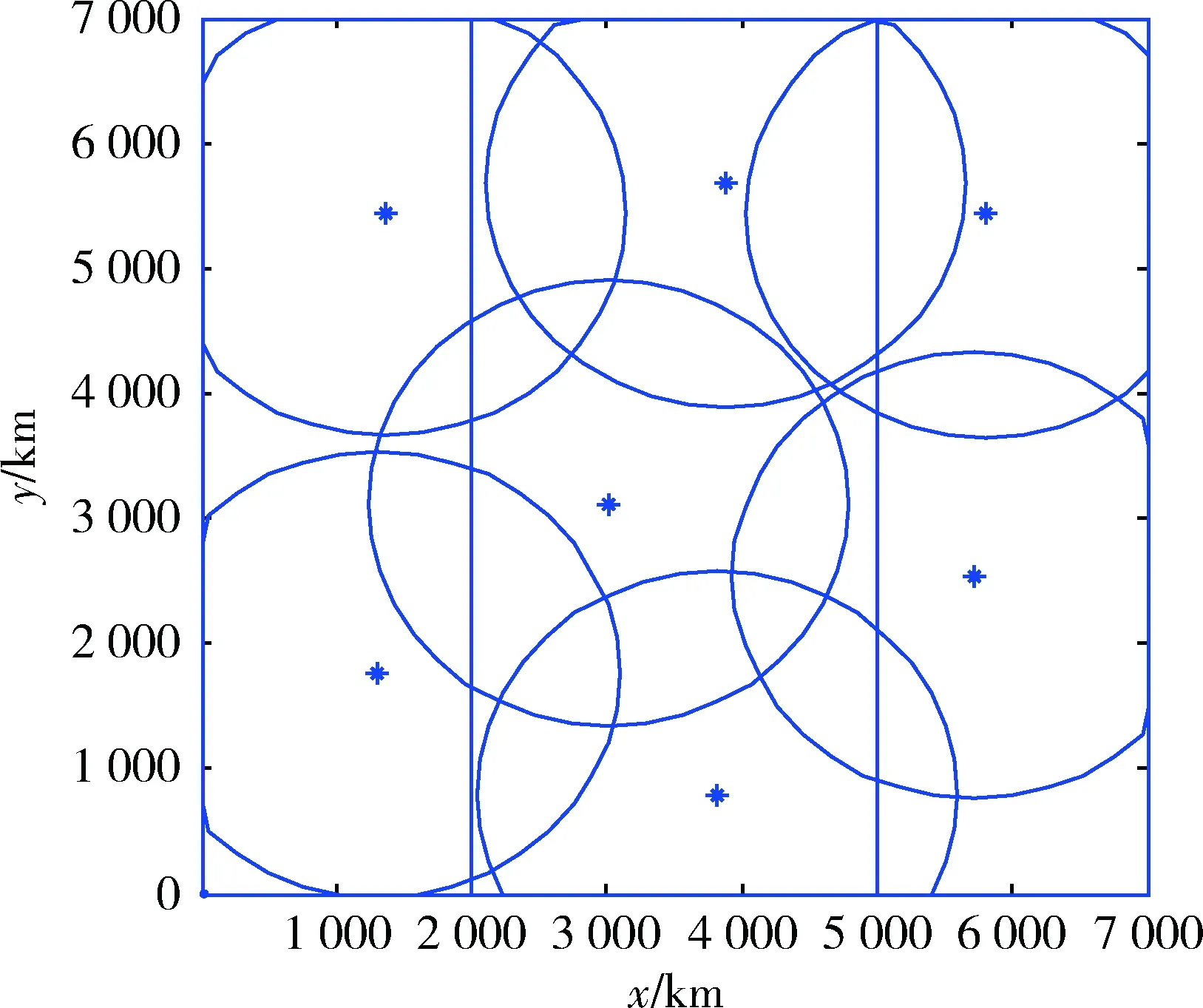
图9 重构后飞艇部署方案Fig.9 Airship deployment plan after the reconstruction
其中组网探测系统的各飞艇坐标分别为(1 309, 1 760),(1 366, 5 440),(3 014, 3 121),(3 815, 797),(5 803, 5 432),(3 876, 5 675),(5 713, 2 540),探测区覆盖率α为95.29%,重点区覆盖率φ为99.61%,重叠覆盖率β为31.47%,资源利用率为97.58%,评价值为0.142 6。相邻飞艇之间最远距离如表4所示。
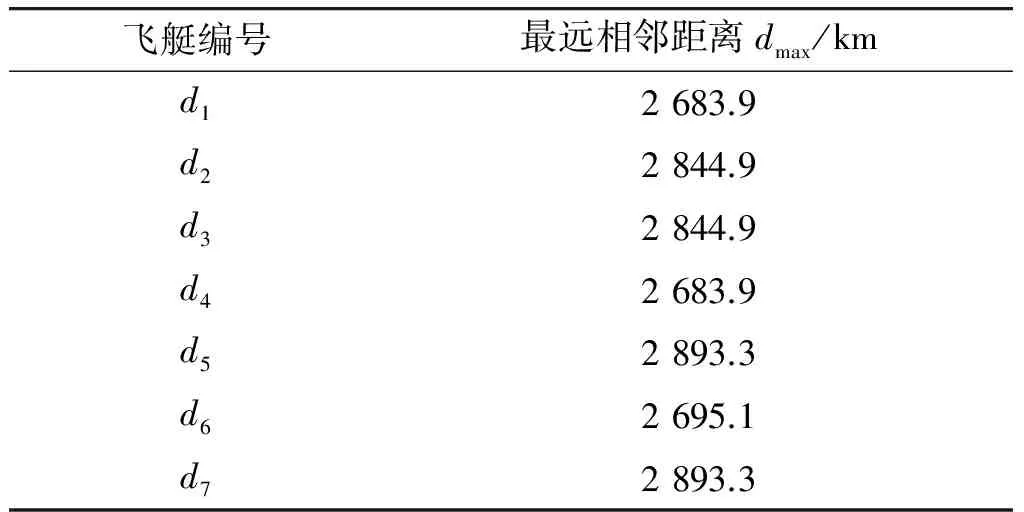
表4 相邻飞艇间最远距离
通过仿真结果可以发现,重新进行部署规划后,飞艇组网探测系统对于探测区的覆盖率提升了1.84%,重点区覆盖率提升了0.31%,重叠率提升了8.31%,资源利用率下降了1.28%,同时对比表3,4,也可以发现飞艇间衔接性得到了提升。整体上看,重构后系统的性能得到大幅提升。说明通过对飞艇组网系统的部署重构,可以很大程度上提升系统性能,得到效益最优方案。
5 结束语
本文针对飞艇红外系统探测临近空间高超声速目标的组网设计问题,提出了基于性能和基于效益的2种组网部署原则,给出了飞艇红外探测系统的组网量化指标及部署模型,设计了基于遗传算法的优化组网算法。仿真结果表明,本文设计的模型能够满足多种性能指标要求的飞艇部署方案,在实际应用中可以通过选择更为合理的评价系数来得到适合于实际情况的飞艇组网系统部署方案,为临近空间高超声速飞行器的探测提供了新的思路。此外,本文只针对飞艇红外探测系统的静态部署方法进行了研究,如何对组网系统进行动态的部署规划将是下一步研究的重点。
[1] HUANG W, MA L, WANG Z G, et al. A Parametric Study on the Aerodynamic Characteristics of a Hypersonic Wave Rider Vehicle [J]. Acta Astronautica, 2011, 69(3-4):135-140.
[2] 肖松, 谭贤四, 王红,等. 变结构多模型临近空间高超声速飞行器跟踪算法[J]. 红外与激光工程, 2014, 43(7): 2362-2370. XIAO Song, TAN Xian-si, WANG Hong, et al. Variable Structure Multiple Model Near Space Hypersonic Vehicle Tracking Algorithm [J]. Infrared and Laser Engineering, 2014, 43(7): 2362-2370.
[3] 汪连栋, 曾勇虎, 高磊, 等. 临近空间高超声速目标雷达探测技术现状与趋势[J]. 信号处理, 2014(1):72-85. WANG Lian-dong, ZENG Yong-hu, GAO Lei, et al. Technology Status and Development Trend for Radar Detection of Hypersonic Target in Near Space [J]. Journal of Signal Processing,2014(1):72-85.
[4] 周全, 陈权, 王彦朝,等. 临近空间传感器分布式组网研究[J]. 现代防御技术, 2011, 39(4):96-99. ZHOU Quan,CHEN Quan,WANG Yan-chao, et al. Research on Sensor Distributed Netting Near Space [J]. Modern Defence Technology,2011,39(4):96-99.
[5] 李龙梅, 伍江江, 翟保荣,等. 基于混沌粒子群的多飞艇资源配置规划方法[J]. 计算机工程与科学,2014, 36(10):1972-1978. LI Long-mei, WU Jiang-jiang, ZHAI Bao-rong, et al. A Planning Method for Multi-Airship Resource Deployment Based on Chaotic Particle Swarm Optimization [J]. Computer Engineering & Science, 2014, 36(10): 1972-1978.
[6] 周全.临近空间传感器动态组网优化部署研究[J].现代防御技术,2009,37(4):95-99. ZHOU Quan. Optimal Disposition on Near Space Sensor Dynamic Netting [J]. Modern Defense Technology, 2009,37(4):95-99.
[7] 崔玉娟,察豪,田斌. 改进的混合蛙跳算法在雷达网部署中的应用[J]. 海军工程大学学报,2015(1):108-112. CUI Yu-juan, CHA Hao, TIAN Bin. Improved Shuffled Frog Leaping Algorithm for Radar Network Deployment [J].Journal of Naval University of Engineering, 2015(1):108-112.
[8] 肖松, 谭贤四, 王红, 等. 地基雷达探测临近空间高超声速目标优化部署方法[J]. 国防科技大学学报,2015, 37(2):121-127. XIAO Song, TAN Xian-si, WANG Hong, et al. Deployment Optimization Method for Ground-Based Radar to Detect Near Space Hypersonic Target [J].Journal of National University of Defense Technology,2015,37(2):121-127.
[9] GARG P, DODIYAL A K. Reducing RF Blackout During Re-Entry of the Reusable Launch Vehicle[C]∥Aerospace Conference, IEEE, 2009:1-15.
[10] 李宗亭,李广强,贺照辉, 等. 平流层飞艇载雷达系统作战运用分析[J]. 现代雷达,2015,37(2):1-4. LI Zong-ting, LI Guang-qiang, HE Zhao-hui, et al. Analysis of Operational Use of Stratospheric Airship-Based Radar System [J]. Modern Radar, 2015,37(2):1-4.
[11] 雷红文,王虎,杨旭,等. 临近空间太赫兹双基反隐身雷达研究[J]. 空间电子技术,2016(1):73-76. LEI Hong-wen, WANG Hu, YANG Xu, et al. Research on the Bistatic Anti-Stealth Radar in Near Space [J]. Space Electronic Technology, 2016(1):73-76.
[12] 刘旭, 李为民, 别晓峰. 浮空红外探测系统预警高动态目标性能分析[J]. 红外技术,2013, 35(12):788-792. LIU Xu,LI Wei-min,BIE Xiao-feng. Warning Capability Analysis of Floating Infrared Detection System to High-speed Vehicle [J]. Infrared Technology,2013,35(12):788-792.
[13] 张海林, 周林, 左文博, 等. 临近空间高超声速导弹红外特性研究[J]. 激光与红外,2015(1):41-44. ZHANG Hai-lin,ZHOU Lin,ZUO Wen-bo, et al.Study on Infrared Radiation Feature of Near Space Hypersonic Missile [J]. Laser & Infrared, 2015(1):41-44.
[14] 付强,王刚,郭相科, 等. 临空高速目标协同探测跟踪需求分析[J]. 系统工程与电子技术,2015,37(4): 757-762. FU Qiang, WANG Gang, GUO Xiang-ke, et al. Requirements Analysis on Collaborative Detection and Tracking of Near Space High Speed Targets[J]. Systems Engineering and Electronics, 2015, 37(4): 757-762.
[15] 赵杰,王君,张大元,等. 反临近空间高超声速飞行器中末交接视角研究[J]. 飞行力学,2015(3):253-256. ZHAO Jie, WANG Jun, ZHANG Da-yuan, et al. Visual Angle Research for Midcourse and Terminal Guidance Hand-over of Near Space Hypersonic Vehicles[J]. Flight Dynamics, 2015(3):253-256.
[16] 项昌毅,杨浩,程月华,等.基于多评价函数法的可重构性指标分配[J]. 系统工程与电子技术,2014, 36(12): 2461-2465. XIANG Chang-yi, YANG Hao, CHENG Yue-hua, et al. Multi-Evaluation Function for Reconfiguration Allocation[J]. Systems Engineering and Electronics, 2014,36(12):2461-2465.
Networking Design of Airship for Detecting High Dynamic Target in Near Space
YANG Honga, ZHANG Ya-shengb, DING Wen-zhea
(Equipment Academy, a. Department of Graduate Management; b. Department of Space Equipment, Beijing 101416, China)
In order to improve the detectability of the high dynamic target in the near space, a kind of high efficient detection system for airship infrared networking is designed. Firstly, two kinds of network deployment principles based on performance and efficiency are put forward respectively. Then, the optimization index of airship infrared system is designed, and the model is established. On this basis, the optimization model of airship infrared system is built based on genetic optimization algorithm. Simulation results show that the proposed method can meet the needs of different performance requirements of the airship infrared system optimization, which provides a new idea for the detection of high dynamic target in the near space.
airship; infrared detection system; near space high dynamic target; network optimization; netting principle; performance index
2016-06-18;
2016-07-10 基金项目:国家863项目 作者简介:杨虹(1991-),女,四川绵竹人。硕士生,研究方向为航天任务分析与设计。
10.3969/j.issn.1009-086x.2017.02.006
TN202;TP301.6;TP391.9
A
1009-086X(2017)-02-0040-09
通信地址:101416 北京市怀柔区八一路一号装备学院3380信箱 E-mail:1373663085@qq.com.cn