自适应巡航系统工作原理及标定方法简析
2017-05-13李华俊
李华俊,李 思
(长城汽车股份有限公司技术中心,河北省汽车工程技术研究中心,河北 保定 071000)
自适应巡航系统工作原理及标定方法简析
李华俊,李 思
(长城汽车股份有限公司技术中心,河北省汽车工程技术研究中心,河北 保定 071000)
介绍自适应巡航系统的工作原理,分析ACC雷达的距离测定方法及距离计算,解析ACC雷达传感器的标定方法。
自适应巡航;定速巡航;雷达;标定
自适应巡航系统(Adaptive Cruise Control,英文简称ACC)的出现,能够在定速巡航的定速基础上增加定距的功能,大大增加了驾驶的安全性。ACC的超能力离不开毫米波雷达,本文具体分析雷达的距离探测原理与雷达在安装时的精度保证。
1 ACC工作原理
随着电子技术的更新,定速巡航的定速功能已经不能满足人们对驾驶安全性的要求,因为在速度经常变化的路况下,定速巡航是一个很鸡肋的功能,常常让人精神紧张手忙脚乱,还不如用脚控制油门来得直接。为了解决这个问题,ACC就诞生了。
ACC主要由车距传感器(一般安置在车头位置)、车速传感器以及ACC控制单元组成,如图1所示,ACC工作原理如图2所示。其中车距传感器主要负责测量车辆行驶中与前车的距离,当其探测到与前车距离小于既定的安全车距时(每个品牌的设定安全距离都不同),会反馈给ACC控制单元,这时根据车速传感器对安全车速进行判定,最后制动系统和发动机控制系统参与到车辆的减速过程。相反,当前方车辆远离既定的安全距离时,ACC控制单元则自动将车速加速至巡航之前设定速度,使车辆始终保持与前车的行驶距离。目前市场上的ACC系统是有起动底线速度的,比如大众CC轿车;而更高端一些的车型,比如奥迪A6L、A8L、奔驰等系列的新车,直至制动停车都不用驾驶员介入操作,如果前车起步,只需轻点油门就可以再次恢复定距巡航状态。
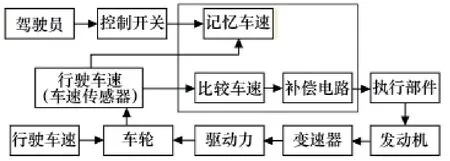
图1 巡航控制系统的组成
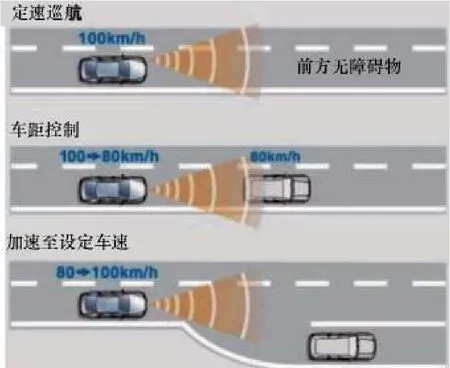
图2 ACC工作原理示意图
2 ACC雷达工作方法
ACC之所以能够对车距进行有效控制,离不开毫米波雷达传感器的作用。雷达不断发出电磁波,碰到前方车辆后返回至雷达,通过雷达内部处理,计算出当前的距离。雷达一般可以探测车前方40 °内250 m范围内的路况。ACC系统控制技术较多,目前最常见的有PID方法、最优控制理论、滑模理论以及模糊理论等。韩国汉阳大学提出的ACC系统控制算法中,理想减速度的确定方法采用LQ最优控制理论。取状态变量和控制量的二次型作为性能指标,其指标函数如式(1)所示
式中:J——性能指标函数;x——状态变量:u——系统控制变量;Q、R——权矩阵。
其理论分析和仿真计算结果表明,该方法在考虑模型误差与系统控制执行器延迟的情况下,仍可以较好地实现ACC系统的性能指标。
其中,对于雷达测速的计算原理,各个雷达生产商会有所不同,笔者用CAD绘制了雷达计算的简易方法,如图3所示。
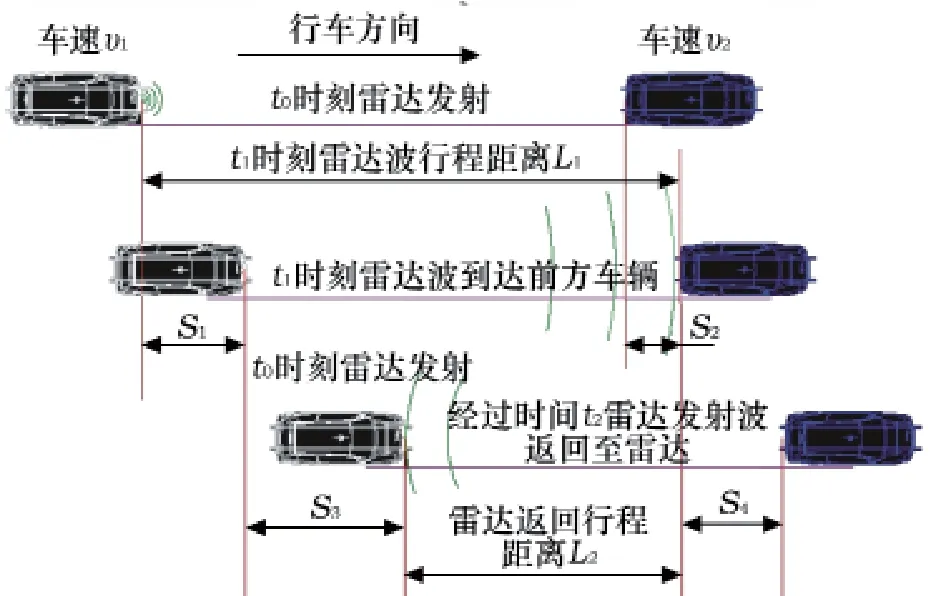
图3 雷达计算的简易方法
假设前后两车车速为恒定值,分别为v1,v2,雷达波的频率为ƒ,雷达波长为λ,雷达传播速度v0=λƒ。
在t0时刻,汽车1发出雷达波,开启自适应巡航系统,雷达波向汽车2传播。
经过时间t1,雷达波到达汽车2,此时雷达走过的距离为L1=v0×t1,S1=v1×t1,S2=v2×t1。
经过时间t2,雷达波返回至汽车1,雷达波返回的距离为L2=v0×(t2-t1),S3=v1×(t2-t1)。
得出t1=t2(λƒ+v1)/2λƒ,所以L1=t2(λƒ+v1)/2。雷达波的频率较快,所以只测定出雷达波第一次触碰到前车的距离即为当前的两车距离。
3 ACC传感器标定方法
雷达安装的准确度是有效控制车距的保障,所以汽车主机厂都会对装有ACC的汽车进行标定。根据各汽车厂的实际情况,ACC雷达标定一般会集成在四轮定位试验台,或者集成在其他驾驶辅助设备标定设备(如360°环视)。一般都是在机能检测线进行标定,由于雷达本身的特性以及标定设备的成本、节拍、场地要求等方面的限制,标定的方式也不相同。本文介绍2种标定方式。
3.1 被动式标定
被动式标定是通过光学测量确定校准镜轴线与行驶轴线的偏差,再读取校准镜与雷达轴线的偏差角,通过调整水平方向和垂直方向的校准螺栓,使雷达轴线与行驶轴线重合或在一个允许的范围内,如图4所示。校准需要在雷达(传感器)表面安装一反射镜,大小约1 cm²。要求镜子的轴线和雷达(传感器)轴线基本重合,镜子轴线与雷达(传感器)轴线的偏差需要提前写入雷达(传感器),并且可以在诊断中读取。校准时,一外置的集光箱将通过外置光源照射到雷达(传感器)的镜子上,镜子反射的光斑将被CCD相机记录,并通过计算机及相应的算法来计算偏差。该实际位置将与原本标定的标准位置比对,操作工在虚拟的灯光成像指导下进行调整传感器以改正误差。校正值会从传感器中被读取并记录。

图4 被动式标定示意图
3.1.1 校准过程(以某工厂实际标定流程为例)
1)车辆对中后,确认传感器与校准镜无物体阻挡。
2)移动基础校准架,使得ACC传感器校准镜到校准目标板之间的距离为1 145 mm(具体值按照产品的特性进行更改)。
3)开启目标板中的激光发射器,由于传感器的安装以及校准架长时间运行会有误差,为了保证激光点能位于校准镜的正中间,需要人为地进行调整。所以,校准目标板需要有上下左右的调节装置。
4)由于激光反射点在目标板中的理论位置已经根据传感器与校准目标板的距离计算出,本车理论发射点水平调节值为12 mm,垂直调节值为20 mm。根据此值,对激光点的落点进行调整。调节水平及垂直调节螺栓,将目标板上的激光反射点调整到要求位置。校准过程调整前后对比见图5。
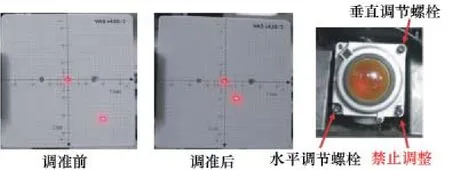
图5 校准过程调整前后对比
3.1.2 校准时的角度和螺栓圈数的转换系数
水平方向校准螺栓角度和圈数的系数为0.536°/圈;垂直方向校准螺栓角度和圈数的系数为0.773°/圈。
3.1.3 雷达校准对车辆的要求
确保雷达校准前车辆已做好四轮定位;正确的胎压;校准时,车辆空载;校准完成后车身质量不允许有过大变动,否则可能造成车辆行驶轴线的偏转。
3.1.4 行驶轴线的定义(图6)
通过四轮定位试验台将行驶轴线的偏差数据传入标定电脑中。
3.1.5 校准镜偏差角坐标系定义
在俯视图中,当雷达插接件向下安装、校准镜轴线位于雷达轴线逆时针方向时,水平偏差角为正值;在侧视图中,当雷达插接件向下安装、校准镜轴线低于雷达轴线时,垂直偏差角为正值。如图7所示。

图6 行驶轴线定义
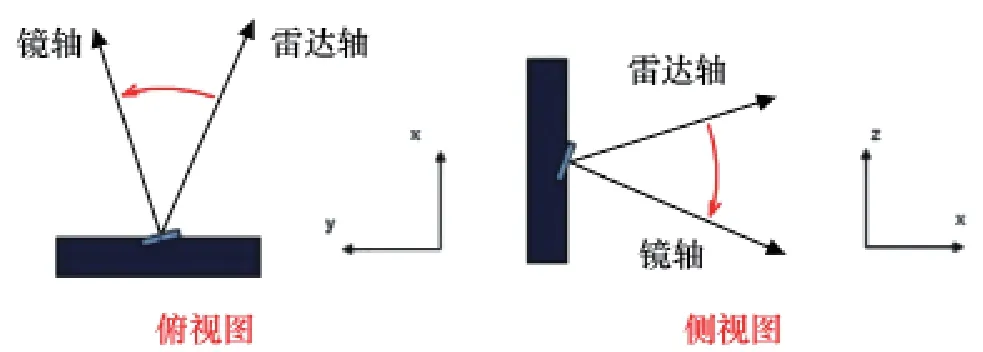
图7 校准镜偏差角坐标系示意图
设备光线收集装置的坐标系,需特别注意角度的正负号与实际校准镜偏差方向上的关系。
4)通过研究结果分析得出沼肥的不合理利用和沼气池建设材料的弊端是影响沼气池环境排放和经济效益的主要因素。
3.1.6 移动方式分析
校准目标板的移动方式对于整个标定过程起到至关重要的因素,在这里需要对移动方式进行具体分析。龙门架式:优点为精度较高、美观、可集成,缺点是成本高;轨道式:优点是结构简单、成本低,缺点是位置精度易发生变化、需要经常校准。
3.2 主动式标定(以BOSCH某产品为例)
主动式标定是通过确定雷达轴线与车辆行驶轴线在水平及垂直方向上的偏差,再通过调整使二者重合或在一个允许的范围内,如图8所示。校准反射板在垂直方向上倾斜3个角度(-2°,0°,2°)。雷达将反射板作为其目标,然后测量出该目标的距离、角度,同时测量出雷达主波束的信号强度。3个倾斜角度的信号强度用来进行垂直方向的校准。
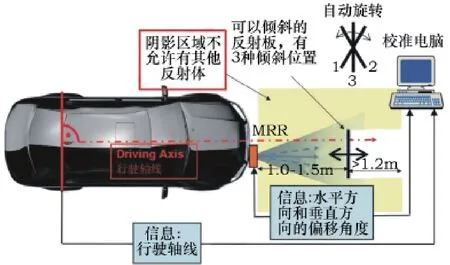
图8 主动式标定示意图
3.2.1 主动式校准过程
主动式校准的过程主要通过反射板的3个不同位置来实现(图9),可以测量到雷达在水平和垂直方向上与反射板之间的偏差(即与车辆行驶轴线的偏差)。在测量结果可信的情况下,可通过该结果计算出水平和垂直方向上的偏差角度,基于偏差角度可采取进一步的操作(如作为标定值存储或对机械式调整的建议值)。在进行校准时,系统会同时测量结果的可信检查,以避免由于镜子被挡住、不存在或者没有按照要求倾斜等因素导致的错误,如果有错误产生,该错误信息会发送到诊断工具中。

图9 主动式校准的过程
一般建议雷达与反射板的距离为1.0~1.5 m。最小距离受远场条件、法定约束及硬件条件的限制(425 MHz的频率斜坡需要1 m的距离来处理直流补偿信号);最大距离可延长,但是需要考虑搭建合适的校准环境,需要考虑工厂内实际的场地限制。
只有当雷达接收到反射板的反射信号强度远远大于周边干扰反射(包括周边反射及多路反射)时,校准过程才能正确进行。如果需要将误差降低0.1°,则需要相对于干扰反射40 dB的信号。
3.2.3 对反射板的要求(距离雷达1.2 m,表1)
3.2.4 校准时的角度和螺栓圈数的转换系数
水平方向校准螺栓角度和圈数的系数:0.536°/圈;垂直方向校准螺栓角度和圈数的系数:0.773°/圈。
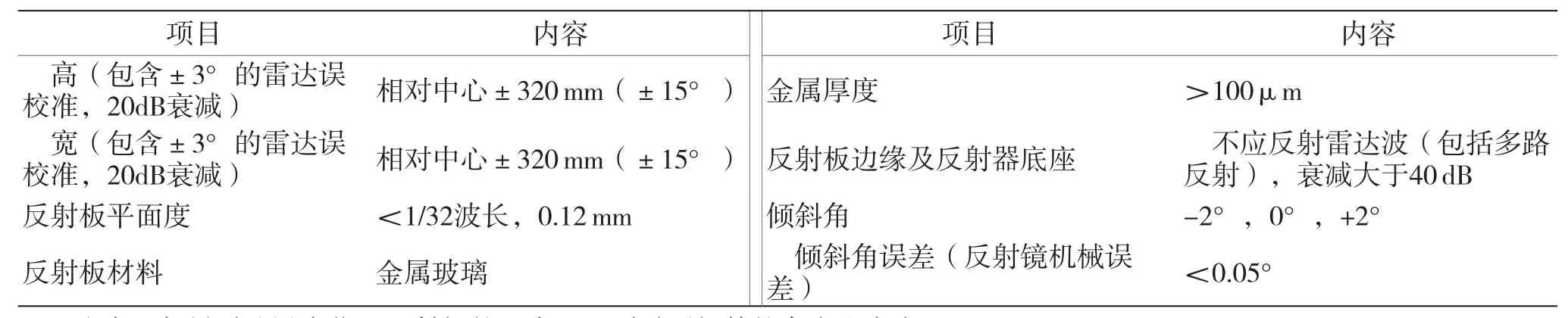
表1 主动式标定反射板的要求
4 结论
被动式校准在意“外在”的调节,即手动调节传感器的安装位置偏差。主动式校准在意“内在”的调节,即内部软件自行补偿偏差值。在节拍上,主动式校准节拍时间较短。在成本上,被动式校准要低。
[1] 张南峰,黄军辉,陈述官.汽车自适应巡航控制系统的应用研究及发展[C]//教育部中南地区高等学校电子电气基础课教学研究会第二十届学术年会会议论文集(下册),2010.
(编辑 心 翔)
The Analysis of ACC Working Principles and Calibration Method
LI Hua-jun, LI Si
(Technical Center of Great Wall Motor Co., Ltd.,Automotive Engineering Technology Research Center, Baoding 071000, China)
This paper introduces ACC (Adaptive Cruise Control) working principles, analyzes the ACC radar distance measurement method as well as the calibration method of radar sensors.
adaptive cruise control; constant speed cruise; radar; calibration
U463.675
A
1003-8639(2017)04-0038-04
2016-08-31
李华俊(1990-),男,主要从事汽车总装车间检测设备选型安装工作。
