基于Bayesian网络的柴油发动机故障诊断分析系统的研发
2017-05-12黄云奇
黄云奇
(广西交通职业技术学院,汽车工程系,广西南宁530023)
故障诊断与维修
基于Bayesian网络的柴油发动机故障诊断分析系统的研发
黄云奇
(广西交通职业技术学院,汽车工程系,广西南宁530023)
根据电控柴油机故障源的多样性和不确定性,提出了先使用传感器数据技术检测发动机不同阶段的工作状态,然后结合经验法、专家指导意见等预算出故障源的可能发生的概率,最后使用Bayesian网络推断查找故障源的一种故障诊断方法。经某电控柴油机的实验结果表明,该系统结合了传感器诊断技术的实时性和Bayesian网络技术的判断决策能力,提高了故障诊断的正确率和实效性。
电控柴油机;Bayesian网络;故障诊断
1 电控柴油机故障的基本特点
现代电控柴油机的结构及工作原理比较复杂,其故障原因和故障现象之间可能存在着一个故障成因对应多个故障现象或者一个故障现象对应多个故障成因的复杂关系。由于故障成因的模糊性,导致柴油机故障源存在着多样性,如果仅通过某些故障现象来判断故障原因,不科学,可能会造成误判。
2 电控柴油机故障诊断技术及其应用情况
基于故障机理的诊断等传统的诊断方法由于柴油机结构的过于复杂而逐渐被淘汰。直接检查法对知识积累要求高,因此局限性很大,通常与其他诊断方法配合使用[1]。故障树诊断法由于诊断过程过于粗糙导致诊断精度低[2];瞬时转速波动诊断方法在一定程度上能够反映故障的有关信息,但不能够反映故障形成的原因,而且测量瞬时转速波动需要高频响、高精度的仪器,成本太高,不具普适性[3]。噪音分析法由于检测噪声信号设备造价昂贵及柴油机噪声来源繁多的限制,该方法目前还未得到广泛的应用[4]。许多现代诊断技术方法便应运而生,传感器诊断技术[5]根据传感器数据的异常对故障进行判断,具有较好的实时性,但容易受到噪声干扰容易产生误判。Bayesian网络诊断技术可以利用各种故障源的先验概率,并且具有很强的判断决策能力,但其有不能充分反映实时性的缺点。
Bayesian网络是模糊知识表达和推理领域里比较有效的理论模型之一,其可从模糊的知识或信息中做出推理。它对于解决由于复杂设备的不确定性和关联性引起的故障诊断方面有很大的优势。其将传感器诊断技术和Bayesian网络诊断技术结合起来,使这两种技术能扬长避短发挥各自的优势,提高了诊断的正确性和实时效率。
3 Bayesian网络故障诊断分析系统的主要组成模块
3.1 知识库模块
知识库储存的主要是基于Bayesian网络的各类故障诊断模型(如图1所示)、诊断规则、网络的所有节点、节点间的相互关系及故障单元先验概率、各类传感器正常工作数据等信息。除了具备储存功能以外还应可以进行有效修改或补充功能。

图1Bayesian网络诊断模型
3.2 柴油机运转数据信息采取及处理模块
该模块通过燃油压力调节器、喷油器喷油压力、怠速控制阀、冷却水温传感器、进气温度传感器、进气压力传感器、转速传感器、节气门位置传感器、氧传感器等获取柴油机的工作状态数据信息,作为故障诊断系统进行诊断推理的证据信息。设n个传感器采集到的状态数据为S(t)=[s1(t),s2(t),…,sn(t)]为了减少各类噪声的干扰,还要对数据信号进行过滤处理。n个传感器的输入输出特征函数为M(t)=[m1(t),m2(t),…,mn(t)],其工作状态数据为D(t)=[(m1(t),s1(t)),…,(mn(t),sn(t))].
3.3 柴油机运行状态判断模块
该模块对传感器传来的各类柴油机运行的实时状态数据进行判断分析,如果这些状态数据与标准值(或参考值)不符则说明出现了故障单元(含传感器本身)。n个传感器的状态数据判断函数为J(t)=[j1(t),j2(t),…,jn(t)],R(t)=[r1(t),r2(t),…,rn(t)]为数据判断结果,则数据判断结果为R(t)=[(j1(t),d1(t)),(j2(t),d2(t))…,(jn(t),dn(t))].若ri(t)=0则说明第i个传感器数据正常,若ri(t)=1则说明第i个传感器数据不正常。
由于柴油机故障的随机性和模糊性,某传感器数据异常并不能说明该单元就是产生故障的直接原因,还需结合Bayesian网络诊断模块进行进一步的诊断。
3.4 Bayesian网络推理诊断模块
该模块是整个系统的核心模块。其主要功能是根据故障现象及所得到的各类信息结合知识库进行推理计算得出每个故障原因节点发生的概率,并给出维修的建议。
如图1所示,将故障分为多个相互独立(至少有明显界限)且完全包含的类别,对各个故障类别分别建立相应的Bayesian网络模型。一般情况下柴油机故障可能不是单一的,而由一个或者多个原因造成,而这些可能的原因也可能是由一个或者几个更低层次的子原因造成,在建立起Bayesian网络的关系节点后要进行概率估计,其方法是当某故障现象出现后,推算与该故障原因有关联的各个节点的条件概率。这种局部化概率估算的方法可有效提高诊断效率[6]。
3.5 人机交互模块
该模块是人与计算机之间传递、交换信息的媒介和对话接口,是系统的重要组成部分。其实现信息的内部形式与人类可以接受形式之间的转换。
3.6 系统帮助和支持模块
用户通过该模块可查询有关参数设置、功能使用、操作引导等操作。
4 Bayesian网络故障诊断分析系统实验及结果分析[7]
4.1 网络诊断模型的构建
燃油供油系的多种故障现象与可能的故障源有明显的因果关系,存在着典型的“多对多”关系,因此以燃油供给系统的故障现象(如:不能正常起动、发动机抖动、排气管冒黑烟、加速不力等)为例建立起Bayesian诊断网络模型,如图2所示。
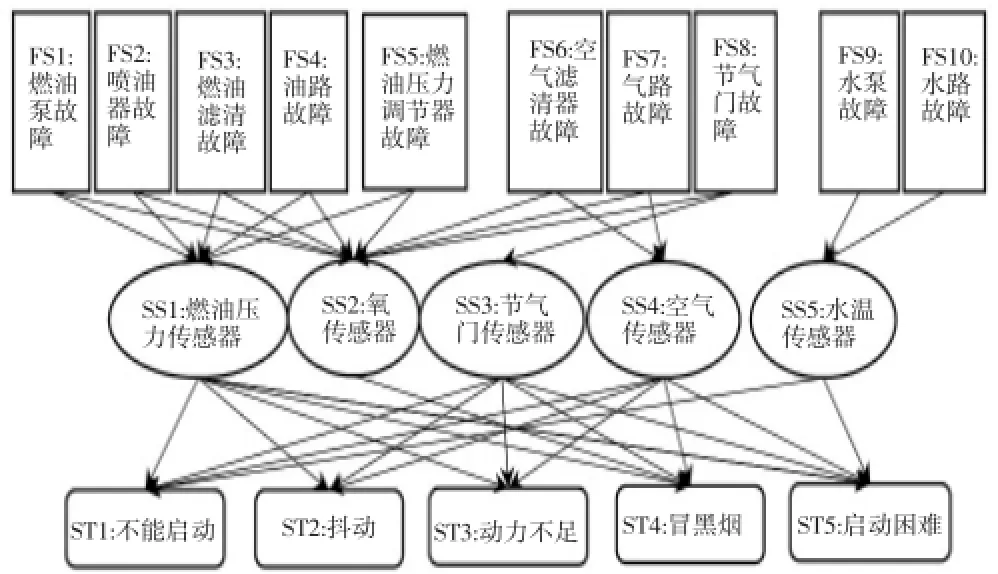
图2 发动机燃油系统故障贝叶斯网络诊断[7]
以某电控柴油机为实验对象,当出现(加速不力)故障现象后,推断出最有可能的故障原因(或者是故障源)为例进行Bayesian诊断网络的验证分析。用(简写为N)表示正常工作状态,用(简写为A)表示异常工作状态。其母节点(或是故障源)先验概率值可通过查询维修资料、咨询专家、传感器数据分析等基础上结合经验得出(对于系统的并发故障,在统计故障概率时按单独故障重复统计),其数据如表1所示。
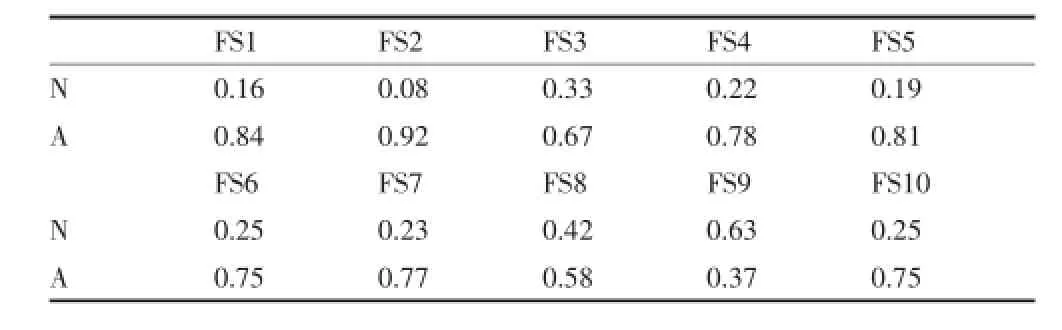
表1 母节点(故障源)的先验概率值
用类似的方法得到其他子节点的条件概率值。子节点SS1(燃油压力传感器)和SS3(节气门传感器)及SS4(空气传感器数据)状态先验概率分别如表2、表3、表4、表5所示。
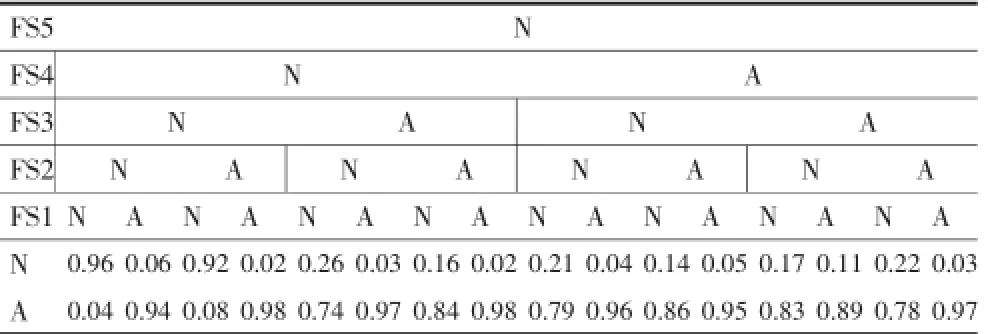
表2 SS1(燃油压力传感器)数据状态的先验概率(1)
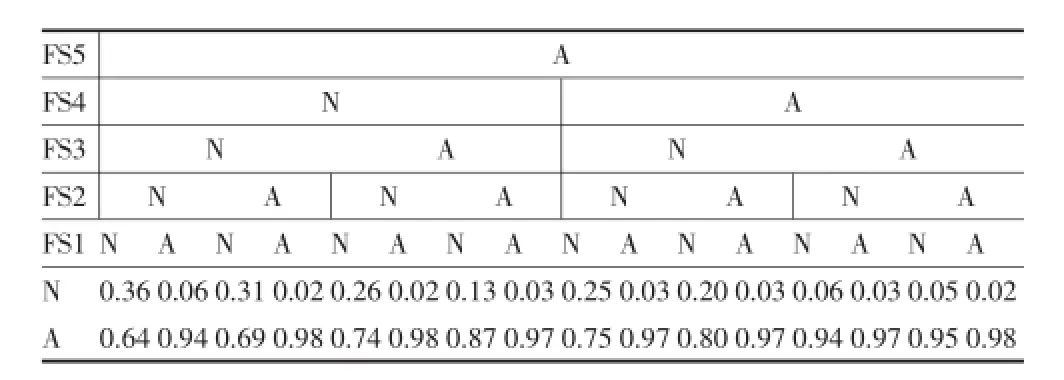
表3 SS1(燃油压力传感器)数据状态的先验概率(2)
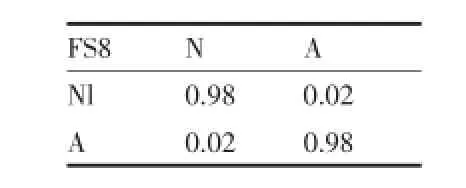
表4 SS3(节气门传感器)数据状态的先验概率值
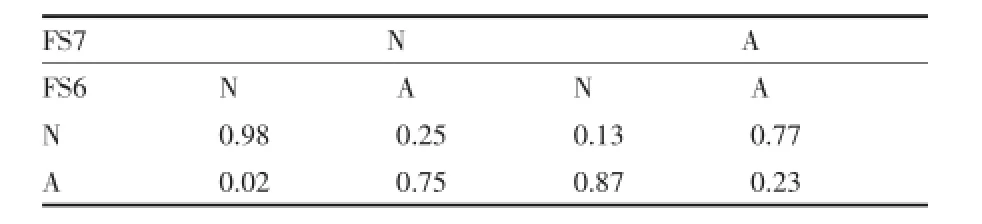
表5 SS4(空气传感器)数据状态的先验概率值
明确上述相关传感器故障先验概率值后,利用Hugin Expert软件进行计算推理。假如产生了ST3(加速不力)的现象,相关的第一级母节点SS1(燃油压力传感器)和SS3(节气门传感器)及SS4(空气传感器)发生数据不正常的概率如表6所示。从表6可知(燃油压力传感器)数据不正常的概率最高,而SS4(空气传感器)发生不正常的可能性最低。

表6 ST3(加速不力)故障现象第一级母节点概率
令ST3(加速不力)和SS4(空气传感器)同时出现数据不正常的情况,对应的第二级母节点FS1(燃油泵故障)、FS2(喷油器故障)、FS3(燃油滤清器故障)、FS4(油路故障)、FS5(燃油压力调节器)故障如表7所示。当子节点ST3(加速不力)的现象产生后,FS2(喷油器故障)是产生故障概率最高的故障源,最低的可能是FS3(燃油滤清器)是产生故障概率最低的故障源。

表7 ST3(加速不力)故障现象第二级母节点概率
5 结束语
经过理论建模、推理和实操后,对Bayesian网络在电控柴油机综合故障诊断上的应用有以下的结论:故障诊断的实效性与传感器数据的准确性有关;故障推断的结果与故障源的先验概率值密切相关;如果明确的节点概率越多,同时推断过程更明确,则推断的结果会更加准确。
[1]林洋.基于贝叶斯网络船用柴油机故障诊断系统的研究[D].大连:大连理工大学,2016
[2]尚文,王维民,齐鹏逸,等.基于条件规则与故障树法的燃气轮机故障诊断[J].机电工程,2013,30(7):798-801.
[3]王维琨,江志农,张进杰.基于神经网络和瞬时转速的发动机失火故障研究[J].机电工程,2013,30(7):824-827.
[4]冯二浩,廊辉山,郑宏侠.柴油机故障诊断研究综述[J].机械管理开发,2010,25(2):109-111.
[5]Luo R C.Dynamic Multi-sensor Data Fusion System for In telligent Robots[J].IEEE Journal of Robotics and Automation. 1988,4(4):386-396.
[5]董旭初,欧阳丹彤,刘大有.Bayesian网推理中的化简方法[J].吉林大学学报(理学版),2004,42(1):77-83.
[6]刘存香,刘学军,韦志康.基于Bayesian故障诊断网络的柴油机故障信息关联度研究分析[J].拖拉机与农用运输车,2008,35(1):48-49.
[7]黄云奇,刘存香.融合电控柴油机传感器数据的贝叶斯综合故障诊断网络研究[J].机电工程,2015,32(2):246-250.
The Diesel Engine Fault Diagnosis Based on Bayesian Network Analysis System Research and Development
HUANG Yun-qi
(Guangxi Vocational and Technical College of Communications,Department of Automotive Engineering,Nanning Guangxi 530023,China)
According to the diversity of electronically controlled diesel engine fault sources and uncertainty,this paper proposes to use the sensor data to detect the working state of the engine at different stages then combined with the empirical method,expert guidance,such as the probability of the budget for the source of the fault may occur,and finally the use of bayesian networks to infer a fault diagnosis method to find the source of the fault.An experimental results show that the electronic control diesel engine this system combined the sensor diagnosis technology of the real-time performance and decision-making ability of the bayesian network technology,the accuracy of fault diagnosis is improved and the effectiveness.
electronic control diesel engine;bayesian networks;fault diagnosis
TK428
A
1672-545X(2017)03-0219-04
2016-12-03
2015年广西高校科学技术研究项目(项目编号:KY2015YB415)
黄云奇(1977-),男,广西南宁人,副教授,工程师,研究生学历,工学硕士,主要研究方向:汽车机电一体化技术、高等职职业教育教学与改革。
