串联机器人静态位姿精度分析及评价指标建立
2017-05-11朱鑫翔
朱鑫翔
摘要:串联机器人的精度是由它末端执行器的位姿精度来表示的,而它的位姿精度主要来源于机器人的静态误差,本文利用矩阵法建立机器人静态误差模型,以Frobenius范数作为位姿精度的评价指标。
Abstract: The precision of the series robot is expressed by the attitude accuracy of the end effector, and its attitude and attitude accuracy mainly comes from the static error of the robot. In this paper, the static error model of the robot is established by matrix method, and the Frobenius norm is used as the attitude accuracy of the evaluation index.
关键词:位姿精度;Frobenius范数;评价指标
Key words: pose accuracy;Frobenius norm;evaluation index
中图分类号:TP242 文献标识码:A 文章编号:1006-4311(2017)15-0230-03
0 引言
串联机器人的静态误差分析其实就是对其末端执行器在空间的位姿误差进行分析,其分析方法主要借鉴串联机器人运动速度分析时的传递矩阵法或矢量法。在分析串联机器人的结构,发现引起串联机器人末端执行器位姿误差的因素主要分成两大类:结构参数误差和运动变量误差[1]。现在建立的位姿误差模型是基于串联机器人的运动,那么研究的方向就是运动变量引起的误差[2]。这就要求假设的前提是串联机器人是刚体并且组成机器人的各连杆构件的参数误差及装配误差引起的关节角的误差确定。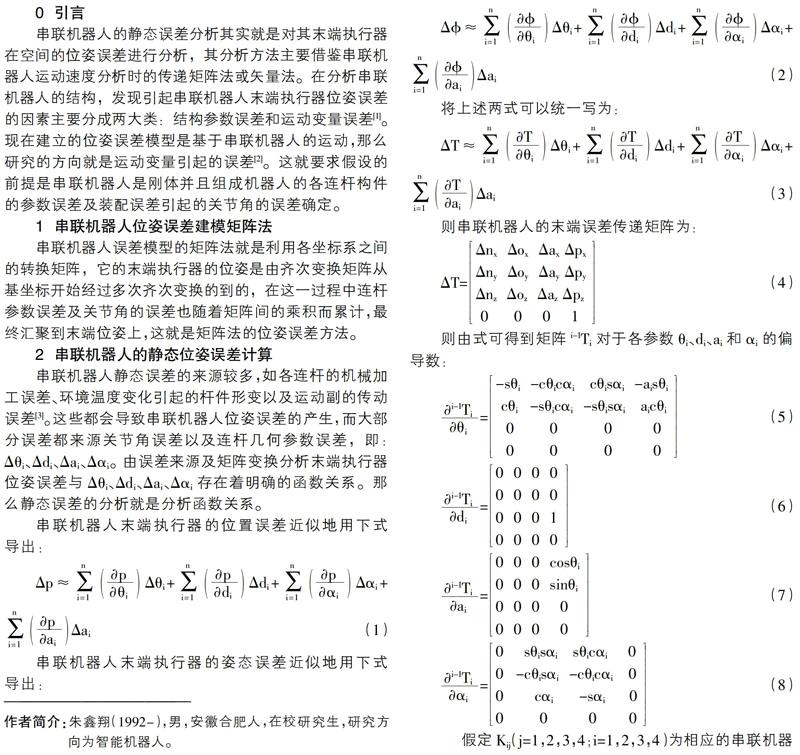
1 串联机器人位姿误差建模矩阵法
串联机器人误差模型的矩阵法就是利用各坐标系之间的转换矩阵,它的末端执行器的位姿是由齐次变换矩阵从基坐标开始经过多次齐次变换的到的,在这一过程中连杆参数误差及关节角的误差也随着矩阵间的乘积而累计,最终汇聚到末端位姿上,这就是矩阵法的位姿误差方法。
2 串联机器人的静态位姿误差计算
串联机器人静态误差的来源较多,如各连杆的机械加工误差、环境温度变化引起的杆件形变以及运动副的传动误差[3]。这些都会导致串联机器人位姿误差的产生,而大部分误差都来源关节角误差以及连杆几何参数误差,即:Δθi、Δdi、Δai、Δαi。由误差来源及矩阵变换分析末端执行器位姿误差与Δθi、Δdi、Δai、Δαi存在着明确的函数关系。那么静态误差的分析就是分析函数关系。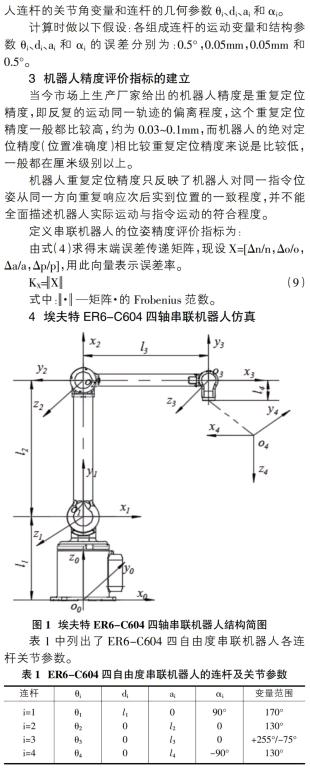
3 机器人精度评价指标的建立
当今市场上生产厂家给出的机器人精度是重复定位精度,即反复的运动同一轨迹的偏离程度,这个重复定位精度一般都比较高,约为0.03~0.1mm,而机器人的绝对定位精度(位置准确度)相比较重复定位精度来说是比较低,一般都在厘米级别以上。
机器人重复定位精度只反映了机器人对同一指令位姿从同一方向重复响应次后实到位置的一致程度,并不能全面描述机器人实际运动与指令运动的符合程度。
定义串联机器人的位姿精度评价指标为:
由式(4)求得末端误差传递矩阵,现设X=[Δn/n,Δo/o,Δa/a,Δp/p],用此向量表示误差率。
4 埃夫特ER6-C604四轴串联机器人仿真
表1中列出了ER6-C604四自由度串联机器人各连杆关节参数。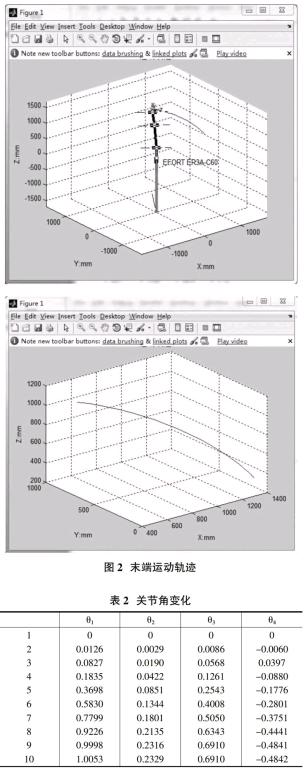
4.1 MATLAB仿真实例
根据之前对该机器人的参数分析,编写机器人仿真的程序。在编写程序时,首先要确定机器人末端的移动坐标。在对机器人三维建模时,得到了机器人在笛卡尔空间的一个初始状态运动到现在设定该机器人运动到另一点B的坐表为(559.5,881.6,1028.8)。起始位置点A和B点所对应的各个关节变量为:
A点:q1=[0 0 0 0];
B点:q2=[1.0053,0.2329,0.6911,-0.4842];
在机器人三维建模中,末端运动轨迹如图2所示。
4.2 PUMA56机器人仿真结果计算(表2、3、4)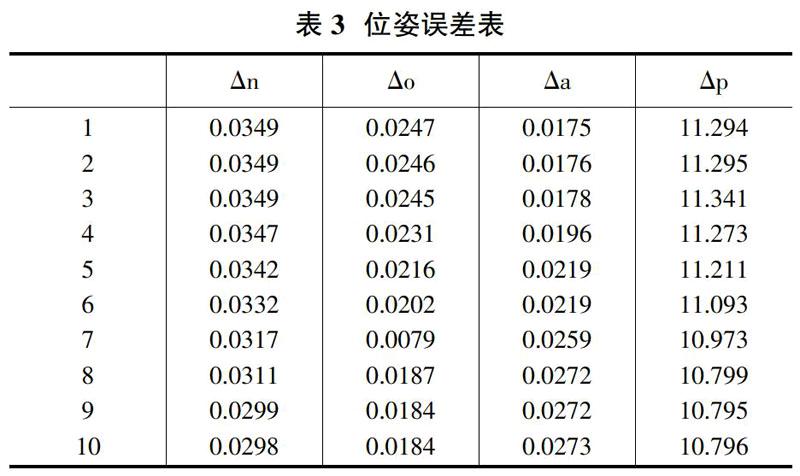
5 结束语
由表2、表3、表4分析可知机器人的关节角随时间的增大而逐步增加,其引起的结果是位姿误差中沿基坐标的X,Y方向的余弦变量误差逐步增大,沿Z方向的余弦变量误差逐步减少,其误差变换率也是如此。其评价指标看,初始位置与终点位置有些许变化,总体较为平稳。由此得出结论此款机器人的各关节角作用同等重要。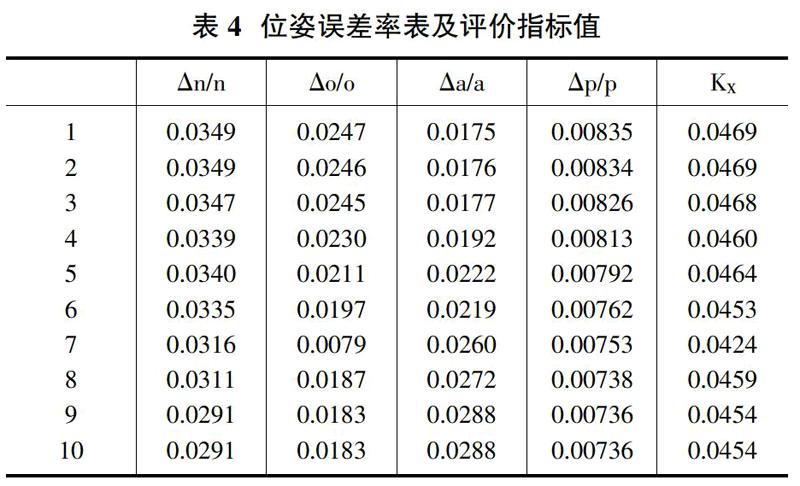
参考文献:
[1]焦国太,余跃庆,梁浩.机器人位姿误差的结构矩阵分析方法[J].应用基础与工程科学学报,2015,9(2):259-265.
[2]刘志杰.并联机器人位姿误差分析与补偿方法研究[D].秦皇岛市:燕山大學,2010.
[3]杨文玉.工业机器人机械零位的测量与标定方法[D].武汉市:华中科技大学,2008.
