助推滑翔高超声速反舰导弹多方向协同突防可行性研究
2017-05-11王少平董受全李晓阳葛津华
王少平,董受全,李晓阳,葛津华
(1.海军大连舰艇学院,辽宁大连 116018;2.92956部队,辽宁大连 116041;3.91329部队,山东威海 264200)
助推滑翔高超声速反舰导弹多方向协同突防可行性研究
王少平1,董受全1,李晓阳2,葛津华3
(1.海军大连舰艇学院,辽宁大连 116018;2.92956部队,辽宁大连 116041;3.91329部队,山东威海 264200)
在分析助推滑翔高超声速反舰导弹弹道特点的基础上,设计可能的多弹协同突防策略;建立下压段导弹质心运动方程,并在满足落角约束的最优导引律条件下,分析单平台发射多枚导弹多方向协同突防的可行性。通过仿真得出助推滑翔高超声速反舰导弹在过载、落地倾角、动压等条件的约束下,采用人工设置虚拟目标的方式进行单平台多弹多方向协同突防具有可行性。
助推滑翔高超声速反舰导弹;下压段;突防策略;可行性
自1938年奥地利科学家桑格尔首次提出临近空间助推滑翔飞行器研究方案[1]以来,助推滑翔这一独特的飞行方式被众多国家应用到高超声速飞行器上。尽管吸气式高超声速飞行器近年来也取得了较大的发展,但由于其较助推滑翔高超声速飞行器技术实现难度更大,因此,目前更接近武器实用化的可能还是无动力助推滑翔武器[2]。目前包括美国、俄罗斯、印度、日本、德国等国在助推滑翔飞行器研究和试验等方面已经取得了重大的成就,尤其是美国已经进行了多种型号高超声速导弹的飞行试验,可以预见在未来几年内,助推滑翔高超声速反舰导弹也有可能出现在海战场上。
尽管助推滑翔高超声速反舰导弹具有其他常规反舰导弹所不能企及的优势,但随着水面舰艇防空武器装备的发展,高超声速反舰导弹也将面临越来越大的威胁,因此需要针对高超声速反舰导弹设计合理的突防方法和策略,如单方向齐射、多方向齐射、单方向连续射击等。此外,由于高超声速反舰导弹对飞行控制信息具有极端敏感的特点,因此其在飞行过程中要受到更为严苛的过载和动压等限制,这些都影响到高超声速反舰导弹突防战术的可行性和可用性。
1 弹道特点及突防策略研究
助推滑翔高超声速飞行器与吸气式高超声速飞行器以及其他亚声速和超声速飞行器的飞行弹道存在较大差异,因此助推滑翔高超声速反舰导弹与其他类型反舰导弹相比也存在诸多不同特点。
1.1 弹道特点
根据文献[3-5]等对助推滑翔高超声速飞行器弹道的分段方法,可将助推滑翔高超声速反舰导弹飞行弹道分为主动段、惯性段、再入滑翔段和下压段等四个阶段,如图1所示。对照以往对反舰导弹弹道的分段方式,可将主动段、惯性段、再入滑翔段合称为自控段,下压段也可称为自导段。
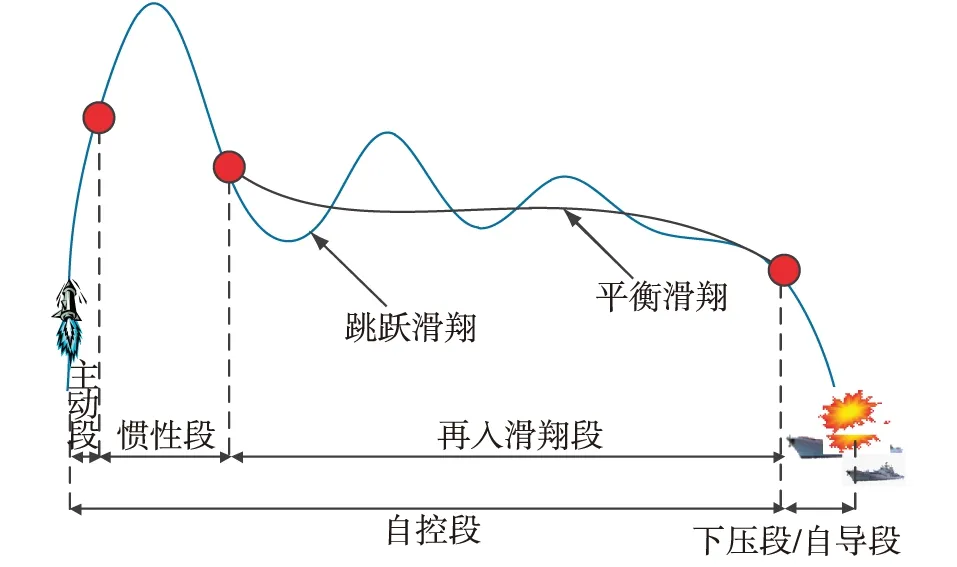
图1 助推-滑翔弹道示意图
助推滑翔高超声速导弹在主动段的飞行时间并不长,一般为几十秒,而主动段终点的速度、高度和弹道倾角将根据目标距离的不同而有所差异,通常主动段终点导弹飞行速度一般大于2.5km/s,弹道倾角的大小应使得导弹弹道最高点的高度小于200km[6];高超声速反舰导弹惯性段起点的弹道倾角一般比较小,因此惯性段的飞行时间比较小;再入滑翔段一般是导弹飞行时间最长的一段弹道,尤其是对助推跳跃滑翔导弹来说,其弹道机动范围较大,由于在此段导弹飞行时间较长,因此是防御武器拦截的重点区域;在下压段,由于导弹要在高马赫下对目标实现“灌顶”攻击,因此导弹下压段弹道落点倾角一般要大于60°,同时受末制导装置的作用范围所限,导弹在该段飞行距离一般小于100km。
1.2 突防策略
由于高超声速滑翔飞行器可依靠良好的气动性能实现远距离的无动力受控滑翔飞行,且由于其具有较强的横向机动能力,因此可形成一个较大范围的打击区域[7],这就为多枚高超声速反舰导弹协同突防创造了可能性。同时对于助推滑翔导弹来说,由于其一般无航路规划功能,因此对于同一目标,其弹道具有唯一性,如果对于同一发射平台,要生成不同弹道,形成多方向协同突防的态势,就需要人工设定虚拟目标。假设这一方法可行,则按照导弹发射平台的数量及导弹攻击方向可将突防样式分为以下三种,如图2~图4所示。

图2 单舰单方向突防

图3 多舰多方向突防

图4 单舰多方向突防
其中图2和图3分别为单舰(或多舰距离较近时)单方向突防、多舰多方向突防示意图;图4为单舰(或多舰距离较近时)多方向突防。
为减小弹上计算机计算难度,提高弹道规划的快速性,一般反舰导弹自控段弹道的制导方式是标准弹道制导法,即在发射前由导弹发射控制设备按照目标现在点位置和运动要素等解算射击诸元,而后在实际飞行过程中,由导航设备实时敏感导弹的姿态、位置等信息,并与标称弹道进行比对,进而动态消除导弹飞行误差。同时由于助推滑翔高超声速反舰导弹一般无航路规划能力,因此,当采用图2和图3中所示的多弹突防策略时,每枚导弹都是按照既定程序解算射击诸元,而当采用图4所示的多弹突防策略时,就需要在采用虚拟目标进行射击诸元解算,进而保证多枚弹道具有不同的飞行弹道,从而增加目标的抗击难度,因此后续主要对图4所示的突防策略进行研究。
1.3 单舰多方向突防要素模型
当导弹采用现在点射击方式时,末制导雷达开机时刻目标正好处于末制导雷达搜索区中心,且导弹飞行方向正对目标,即导弹速度偏航角为0,而当采用人工设定虚拟目标解算射击诸元时,末制导雷达开机时刻导弹坐标将发生变化,导弹速度偏航角相对实际目标也将发生改变,当末制导雷达开机时刻导弹坐标、导弹偏航角发生变化时,导弹依然可在过载等约束下导向目标,则认为采用人工设定虚拟目标的方式可应用于单平台发射多弹进行多方向协同突防。其中虚拟目标坐标的确定按照图5所示的态势进行解算。图5中S为导弹发射平台,O为实际打击目标,曲线SK1O为按照实际目标O解算的飞行弹道,曲线SK2O为按照虚拟目标O、解算的飞行弹道,定义∠K1OK2即ψx为协同角。则当目标O的位置确定后,实际飞行弹道中末制导雷达开机点坐标K1也就随之确定,再依据要求的协同角大小就可计算出末制导雷达开机点坐标K2,由于末制导雷达开机点的坐标是与目标坐标一一对应的,因此,确定了末制导雷达开机点的坐标K2就可确定虚拟目标的位置坐标。
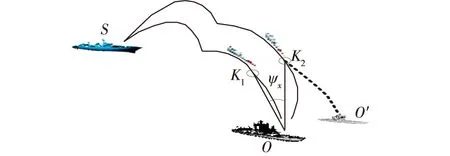
图5 单舰多方向突防态势图
按照上述突防方案,并根据导弹具体的技术性能就可分析得出具体的突防实施要素。
2 下压段导引规律
下压段作为高超声速反舰导弹的自导段,其制导性能将是影响导弹打击能力的关键因素。
2.1 坐标系及转换
1)目标坐标系
定义目标坐标系o-xyz(O)如下:该坐标系的原点o在目标处,ox轴为当地水平面内指向导弹为正,oy在地心与目标的连线上,向上为正,oz轴按照右手定则确定。(x,y,z)为导弹坐标在目标坐标系各轴的投影,(Vx,Vy,Vz)为导弹速度在目标坐标系各轴上的投影。
2)视线坐标系
定义视线坐标系os-ξηζ(S)如下:该坐标系的原点os在目标处,osξ由目标指向导弹质心为正,osη轴在目标当地水平面内,且与osξ垂直,osζ由右手定则确定。(Vξ,Vη,Vζ)为导弹速度在视线坐标系各轴上的投影。
3)坐标系转换
根据目标坐标系和视线坐标系的定义,可以得出目标速度矢量在两者之间的转换关系如下:
(1)
其中Bos为目标坐标系与视线坐标系间的转换矩阵:
其中λD为弹目视线倾角,λT为弹目视线偏角。
2.2 质心运动方程
由于高超声速反舰导弹在下压段飞行距离较小,因此可忽略地球自转的影响,并且认为其在下压段仅受空气动力和地球引力的作用。同时,由于助推-滑翔导弹在下压段一般采用BTT控制方式,因此导弹在飞行过程中侧滑角可近似为零。此外,由于反舰导弹打击的目标为水面舰艇类运动目标,因此当以目标坐标系为参考时,可将目标机动速度矢量叠加至导弹运动速度矢量上,则导弹质心运动的动力学标量方程和运动学方程[8-9]可表示为式(2)和式(3):
(2)
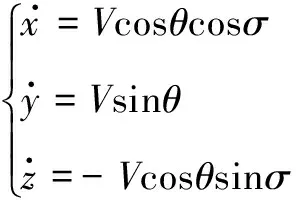
(3)
式中,m为导弹质量;V为导弹飞行速度;θ为导弹的速度倾角;σ为导弹的速度偏角;ν为倾侧角;L为导弹气动升力,L=0.5ρV2CLSref;D为导弹气动阻力,D=0.5ρV2CDSref;g为重力加速度;Sref为导弹参考面积;CL为导弹升力系数;CD为导弹阻力系数;ρ为大气密度;(x,y,z)为导弹在目标坐标系中的坐标。
2.3 导引方程
1)约束条件
按照文献[10]对下压段采用最优导引律制导时的研究结论,即下压段驻点热流较小,不构成弹道约束,但动压和法向过载比再入滑翔段大得多,因此在研究下压段制导时需要考虑对法向过载的控制。此外高超声速反舰导弹在下压段对落地倾角有一定的约束。综合过载约束和落地倾角约束,则下压段的约束条件如式(4)所示。
(4)

2)下压段导引律
对助推-滑翔导弹下压段制导方法有很多,例如微分平坦方法的闭路制导律、考虑运动耦合的非线性制导方法[11]等,为不失一般性,选择再入机动弹头常用的一种满足落角约束的最优导引律,该导引律按照俯仰平面和转弯平面进行独立设计,在俯仰平面和转弯平面的导引方程分别为[7,12]:
(5)

3 仿真及分析
根据上述相关模型,仿真分析目标机动对高超声速反舰导弹下压段导引特性的影响。
3.1 仿真条件
1)导弹气动模型:采用文献[13]中CAV-H的气动数据,质量为907kg,气动参考面积为0.48378m2。
2)大气密度模型、声速计算模型、重力加速度计算模型采用文献[14]中的模型。
3)导引系数KD1、KD2、KT按照文献[12]分别取-4、-2和3。
4)约束值:过载约束值20g;落点倾角约束值-70°;
5)初始条件:目标机动速度为0,弹目距离100km,弹道倾角0°,弹道偏角0°,初始导弹速度1800m/s。实际开机点导弹坐标为(-95394,30000,0)。
6)假设态势1:目标机动速度为0,弹目距离100km,弹道倾角0°,初始导弹速度1800m/s,根据虚拟目标计算的开机点1坐标为(-81240,30000,50000),则其以XY平面为参照的对称坐标为(-81240,30000,-50000)。
7)假设态势2:目标机动速度为0,弹目距离100km,弹道倾角0°,初始导弹速度1800 m/s,假设根据虚拟目标计算的开机点坐标2为(-51962,30000,80000),则其以XY平面为参照的对称坐标为(-51962,30000,-80000)。
8)假设态势3:目标机动方式为匀速直线运动,机动速度为30kn,相对目标坐标系X轴的航向分别取90°、270°;弹目距离100km,弹道倾角0°,初始导弹速度1800 m/s,假设根据虚拟目标计算的开机点坐标3为(-81240,30000,50000),则其以XY平面为参照的对称坐标为(-81240,30000,-50000)。
9)仿真步长:0.01。
3.2 仿真结果分析
由于目标机动与目标静止时的仿真过程类似,并且同样可以得出弹道高度、导弹飞行速度等变化情况,因此,文中对目标机动条件下下压段弹道仿真时,仅列出仿真弹道结果及过载变化情况。按照上述仿真条件,仿真结果如图6~图13所示。
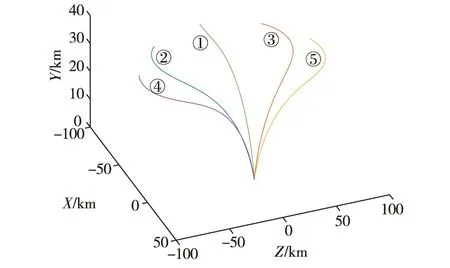
图6 弹道显示图
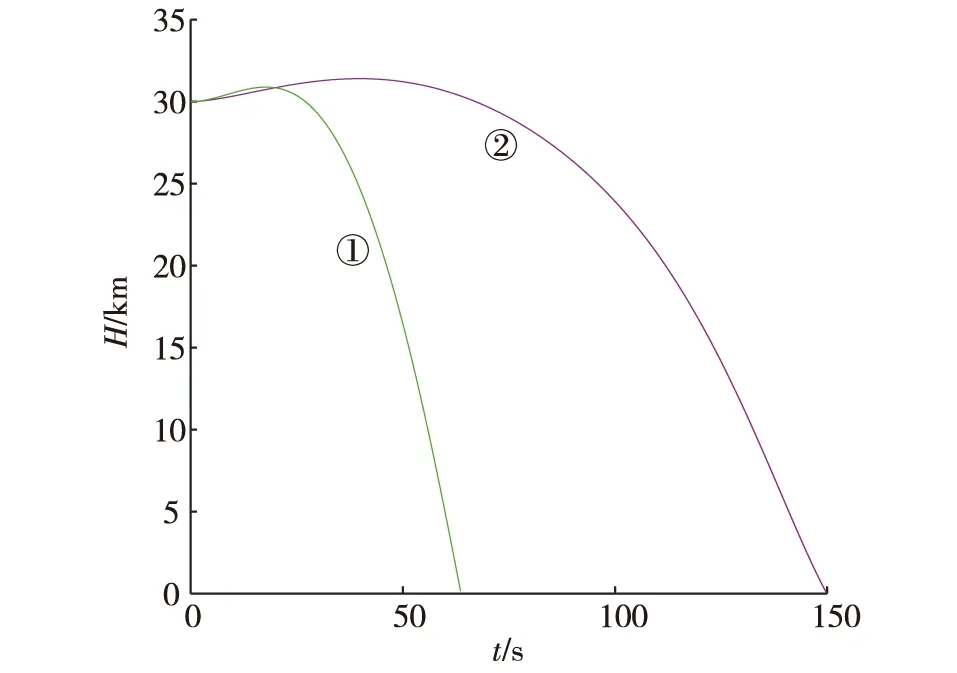
图7 弹道高度变化图

图8 导弹飞行速度变化图
图例说明:
1)图6中弹道①为在仿真条件5)下得出的;弹道②、③是在仿真条件6)下得出的;弹道④、⑤是在仿真条件7)下得出的。
2)图7~图9、图11~图13中①为在仿真条件5)下得出的,②为在仿真条件6)和7)下得出的。
3)图10中①为在仿真条件5)下得出的,②、③为在仿真条件6)和7)下得出的。
4)图14和图15中①为在仿真条件8)下,末制导雷达的开机点坐标为(-81240,30000,-50000),且目标航向为270°,或开机点坐标为(-81240,30000,50000),且目标航向为90°得出,② 为在仿真条件8)下,且末制导雷达的开机点坐标为(-81240,30000,-50000),且目标航向为90°,或开机点坐标为(-81240,30000,50000),且目标航向为270°得出。
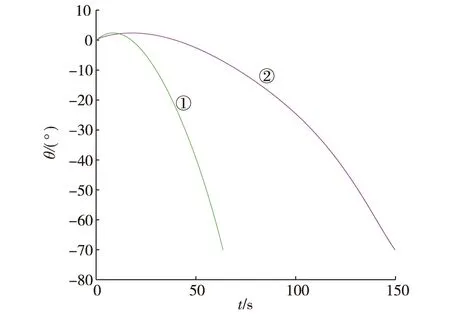
图9 弹道倾角变化图

图10 倾侧角变化图
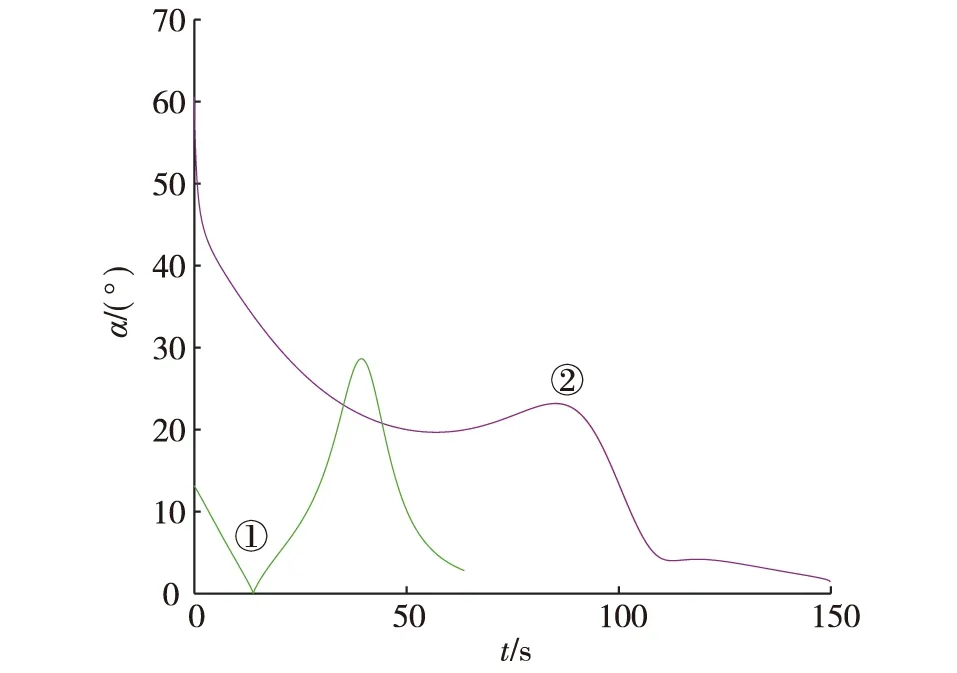
图11 攻角变化图
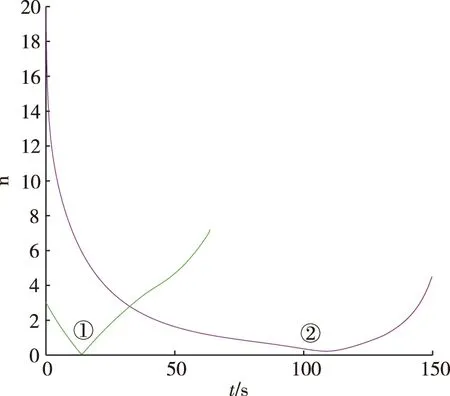
图12 过载变化图

图13 动压变化图
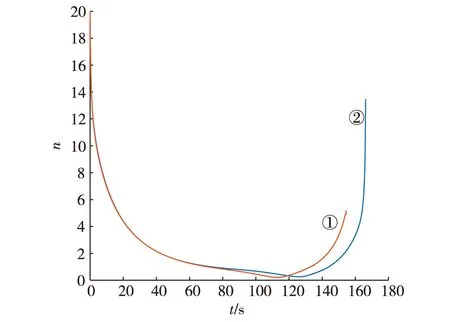
图15 过载变化图(目标机动速度30kn)
通过图6~图15中的仿真结果可以得出以下结论:
1)在初始条件下导弹飞行时间为63.8s,最大过载为9.3775;在假设态势1条件下,当初始弹道倾角不变时,最大可选择的弹道偏角为±53.065°,此时最大协同角为31.4729°,导弹飞行时间为149.9s,过载为19.9843;在假设态势2下,当初始弹道倾角不变时,最大可选择的弹道偏角为±27.69°,协同角为62.9458°,导弹飞行时间为150s,过载为19.9985。因此可以看出,在过载和弹道落地倾角等的约束下,根据导弹末制导雷达开机点坐标的不同,导弹弹道偏角有足够大的选择范围,并且多弹协同攻击时方向差异也较大,因此,可判定采用人工设定虚拟目标的方式可实现单平台多弹多方向协同突防。
2)多枚导弹在同一开机距离,不同开机点坐标和姿态条件下,导弹飞行时间间隔较大,如在初始条件下为63.8s,在假设条件2时为150s,这说明导弹到达目标的时间可供选择的范围较大,从而使多弹多方向突防并且同时临空的条件可以得到保障。
3)如图13,当导弹按照实际目标进行下压段导引时,动压相对是最大的,初始条件下动压最大为1216kPa,而在假设条件1和假设条件2时,动压最大为187kPa,可以看出当采用人工设定虚拟目标规划导弹弹道时,可不考虑下压段动压的约束。
4)如图14和图15所示,当目标机动速度为30kn,且相对X轴航向为90°时,末制导雷达开机点坐标为(-81240,30000,50000)时,最大可选择的弹道偏角为-52.22°,当末制导雷达开机点坐标为(-81240,30000,-50000)时,最大可选择的弹道偏角为53.41°,则当目标相对X轴航向为270°时,末制导雷达开机点坐标为(-81240,30000,50000)时,最大可选择的弹道偏角为-53.41°,当末制导雷达开机点坐标为(-81240,30000,-50000)时,最大可选择的弹道偏角为52.22°,因此可得出当目标机动速度为30kn时,可选择的最大弹道偏角范围为105.63°,而在假设态势1下目标静止时可选择的最大弹道偏角范围为106.13°,由此可以看出,目标机动对助推滑翔高超声速反舰导弹多方向协同攻击的具体实施有一定的影响,但影响较小。
4 结束语
随着高超声速技术的不断发展,在2020年前后可能会有部分助推滑翔高超声速导弹投入使用,该类型导弹的实际使用将会极大地改变敌我对抗的节奏。目前已有包括美国在内的部分国家意识到未来面临来自高超声速导弹的威胁,因此部分国家已从远程探测预警、全弹道拦截、高新防御武器开发和试验等多方面开展了针对高超声速导弹防御的技术研发,并取得了一定的成就。
从目前看,包括助推滑翔高超声速反舰导弹在内的高超声速武器在未来一定时期内可凭借极快的飞行速度、较大的射程等在攻防对抗中占有一定的优势,但随着各类防御武器的研发,这些优势将逐渐减小,而突防这些防御武器的难度将越来越大,因此,合理使用各类突防策略对于提高高超声速反舰导弹的作战能力具有重要的作用。
[1] 闫杰,于云峰,凡永华,等. 吸气式高超声速飞行器控制技术[M].西安:西北工业大学出版社, 2015.
[2] 屈聪颖, 钱红庆. 美国助推滑翔武器发展分析[J]. 战术导弹技术, 2015 (4): 1-4.
[3] 张海林, 周林, 张琳,等. 临近空间高超声速导弹弹道特性分析[J]. 飞航导弹, 2015 (3): 18-21.
[4] 洪蓓, 熊伟, 张艳玲,等. 国外临近空间飞行器全程弹道一体化设计与优化[J]. 导弹与航天运载技术,2015(1): 61-65.
[5] 王路,邢清华,毛艺帆. 助推-滑翔无动力跳跃飞行器轨迹预测[J]. 空军工程大学学报(自然科学版). 2015, 16(1):24-27.
[6] 呼卫军, 周军. 临近空间飞行器拦截策略与拦截武器能力分析[J]. 现代防御技术, 2012, 40(1): 11-15.
[7] 王路, 邢清华. 再入高超声速滑翔飞行器可达区域快速预测方法[J]. 军事运筹与系统工程, 2015, 29 (1): 40-44.
[8] 翁雪花. 考虑终端约束的末制导方法研究[D].哈尔滨: 哈尔滨工业大学, 2015.
[9] 卢晓东,郭建国,林鹏,等. 导弹制导控制系统设计与Matlab仿真[M].西安:西北工业大学出版社, 2010.
[10]刘欣. 助推-滑翔式飞行器弹道设计与制导技术研究[D]. 长沙:国防科学技术大学, 2012.
[11]程子平. 高超声速滑翔飞行器俯冲段制导方法研究[D]. 长沙:国防科学技术大学, 2013.
[12]张毅,肖龙旭,王顺宏. 弹道导弹弹道学[M]. 长沙:国防科学技术大学出版社, 2005.
[13]吕瑞. 高超声速滑翔导弹滑翔段制导方法研究[D]. 哈尔滨:哈尔滨工业大学, 2012.
[14]刘燕斌. 高超声速飞行器建模及其先进飞行控制机理的研究[D]. 南京: 南京航空航天大学, 2007.
Feasibility Study of Multi-direction Coordinated Penetration of the Boost-glide Hypersonic Anti-ship Missile
WANG Shao-ping1, DONG Shou-quan1, LI Xiao-yang2, GE Jin-hua3
(1.Dalian Navy Academy, Dalian 116018; 2.Unit 92956 of PLA, Dalian 116041;3.Unit 91329 of PLA, Weihai 264200, China)
On the basis of analyzing the ballistic trajectory character of boost-glide hypersonic anti-ship missile, some possible penetration strategy is designed. Point-mass equation for missiles is built, and the feasibility of muti-directional penetration of multi-missiles in coordination which launching by single platform is studied, which is based on the optimum guidance law with a terminal angular constraint. Some conclusions are obtained through simulation that the muti-directional penetration of multi-missiles in coordination which launching by single platform is feasible by manually setting virtual targets under the constraints, such as the normal overload,trajectory inclination angle, dynamic pressure.
boost-glide hypersonic anti-ship missile; the dive phase; penetration strategy; feasibility
2017-01-05
2017-02-08
王少平(1985-),男,陕西洛南人,博士研究生,研究方向为反舰导弹作战使用。 董受全(1968-),男,教授。 李晓阳(1985-),男,硕士,助理工程师。 葛津华(1985-),男,硕士,助理工程师。
1673-3819(2017)02-0055-06
TJ761;E917
A
10.3969/j.issn.1673-3819.2017.02.012
