SAR图像舰船尾迹检测及其讨论
2017-05-10杨彦轲
杨彦轲
(成都七中高2015级11班,四川 成都 610000)
SAR图像舰船尾迹检测及其讨论
杨彦轲
(成都七中高2015级11班,四川 成都 610000)
为了保卫国家海洋领域的安全,利用SAR图像进行舰船尾迹的检测是十分有必要的。本文首先探讨了检测舰船尾迹的意义及难点并且对于尾迹结构进行了分析。对于原始SAR图像,利用数学软件MATLAB使用传统的Radon变换方法检测出了开尔文尾迹及湍流尾迹。最后探讨了弱尾迹与不规则尾迹的检测识别,并且讨论了利用深度学习的方法检测舰船尾迹的可能性。
SAR图像;舰船尾迹;检测
1 SAR图像舰船尾迹检测的意义
为了保卫海域及岛屿的主权,监测是否有其他国家的舰船侵入我国海域进行军事活动是十分重要以及必要的。
雷达(Radio Detecting and Ranging, RADAR)是一种基本的无线电探测装置。它可实现对目标的探测和定位,在军事领域起着十分重要的作用。随着科技的发展与进步,合成孔径雷达(Synthetic Aperture Radar, SAR)技术也日益成熟,其可获取更多的信息。SAR是利用一个小天线沿着长线阵的轨迹等速移动并辐射相参信号, 把在不同位置接收的回波进行相干处理, 从而获得较高分辨率的成像雷达。其具有全天时、全天候的观测能力。
SAR由于其全天时全天候的特性可以广泛应用在海洋遥感中。研究人员现利用海洋 SAR 图像进行舰船检测。为了在短时间内有效地检测舰船及舰船尾迹,关于自动检测算法的研究十分重要且有意义。
一般来说,检测舰船及舰船尾迹都十分有必要;但有时研究人员们对于检测舰船尾迹更感兴趣,因为通过检测尾迹从而来发现舰船目标有如下优点。
(1)在SAR图像中,舰船尾迹结构通常比舰船本身大许多,而且更为明显,可以更容易进行检测和识别;(2)舰船尾迹可以用于估计运动舰船的实际位置、航速和航向。比如说湍流尾迹的方向可以帮助人们确定舰船运动的方向;开尔文臂的波长可以用于估计舰船的速度等;(3)舰船尾迹可以用于检测神秘舰船。所谓的神秘舰船,比如说潜艇等。对于神秘舰船,由于它在水下运动,在SAR图像上并不可见。但在某些情况下,潜艇等神秘舰船可以在海面上产生尾迹图像。因此,尾迹检测技术可以用于神秘舰船的研究,对于国防有重大意义。
早在20世纪80年代科学家们已经发现SAR图像上运动舰船存在四种尾迹表现形式:开尔文(Kelvin)尾迹、湍流尾迹、窄V型尾迹与内波尾迹,其尾迹结构如图1所示。开尔文尾迹由两个臂构成,在SAR图像上呈亮线,其半张角为19.5o。窄V型尾迹同样由两个臂构成,在SAR图像上呈亮线,但多数情况下亮度小于开尔文尾迹,其半张角为4o。湍流尾迹可以推算出航迹的方向,在SAR图像上呈暗线。在SAR图像上观测到开尔文尾迹很少能够两个开尔文臂都观测到,另外很少能够观测到开尔文尾迹中的横波。在SAR图像中最常见的尾迹形式是沿着舰船轨迹的一条灰度较暗的窄线,为湍流尾迹。窄V型尾迹要求海面特别平静,水面舰船的内波尾迹并不总是存在的,所以在SAR图像中并不常见。因此在此论文中,主要检测开尔文尾迹以及湍流尾迹。
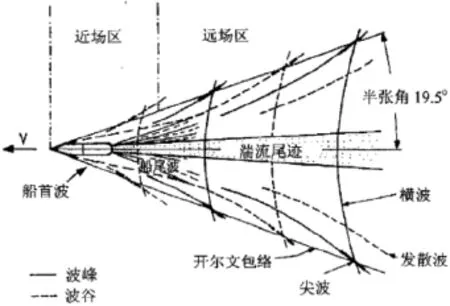
图1 舰船波模式图
真实的海面SAR图像如图2所示。可以看到检测尾迹比检测船只更为容易且有效,因为舰船的尺寸比舰船尾迹的尺寸小得多;但有的尾迹结构的信息并不完全,比如最左边的尾迹,只有一个开尔文臂与湍流尾迹可见;中间区域的舰船尾迹相互交织,将为检测带来困难。

图2 海面的SAR图像
2 利用传统Radon变换实现尾迹检测
文章利用数学软件MATLAB,采用传统的Radon变换实现尾迹的自动检测。Radon变换在提取线性特征方面具有很强的抗噪能力,并且舰船尾迹又具有“直线型”的特征,因而Radon变换在此研究具有不可忽视的优势,大多数检测SAR图像舰船尾迹的论文都是以Radon变换为基础而发展、变形得到的。
与其它高级程序(C语言,C++)相比,MATLAB程序是一种解释执行程序,不用编译等预处理,因此MATLAB程序运行速度相比较慢。这里选用MATLAB软件进行编程的原理是易于上手与理解,并且可以利用自带的Radon函数进行变换。
在二维欧几里德空间中,Radon定义如下:

其中,D指xy轴对应的整个图像平面;f x,y()为在x,y()处的灰度值;ρ为直线到原点的距离;θ为直线到原点距离方向与x轴的形成的夹角;δ为Dirac函数(图3)。
在xy轴形成的平面图像域中,Radon变换沿任何可能存在的任意直线将其像素亮度进行积分,其积分对应于空间中一个单点,在Radon域中使得其线性特征更为明显。其思想可简单表示为图3,(a)图中对应的一条线,利用与原点的夹角及距离则可表示为(b)图中的一个点。亮尾迹Kelvin尾迹在Radon变换域能得到亮的峰值,表示为亮点;暗尾迹湍流尾迹在Radon变换域则得到暗的峰值,表示为暗点。Radon变换在实际检测舰船尾迹中得到了很好的应用。然而其也存在以下局限:(1)当舰船尾迹尺寸相比于整个SAR图像过小时,Radon变换很有可能无法检测出尾迹,因为会被噪声覆盖;(2)当舰船尾迹具有线性特征,但有些许弯曲时,Radon变换无法得到正确的检测结果;(3)Radon变换检测舰船尾迹不能识别出尾迹的起始点和终止点。
由于以上的局限性,目前很多研究人员仍致力于研究尾迹的检测,并提出了一些新的方法可以解决以上的问题。比如,在Radon变换的基础上加入形态学图像处理的方法,去除虚假尾迹;在Radon变换的基础上加窗,实现局部Radon变换,从而可以标记尾迹的起始点。
这里利用传统的Radon变换,进行舰船尾迹的检测,验证利用Radon变换检测尾迹的可行性。具体实现算法如下:(1)对于原始SAR图像进行Radon变换;(2)通过像素值,找到Radon域中最亮的点,代表开尔文尾迹;(3)通过两个最亮的点,找到最暗的点,代表湍流尾迹;(4)利用反Radon变换,将检测到的直线标记到原图像中。
图4为舰船尾迹原图;图5为其Radon变换域,可以明显看到在双X区域有两个明显的亮点和一个暗点,其对应的则为两条开尔文臂与湍流尾迹;图6为检测出的Kelvin尾迹以及湍流尾迹。可以看出开尔文尾迹以及湍流尾迹都被检测出来并标记,结果良好,说明利用Radon变换检测舰船尾迹是可行的。
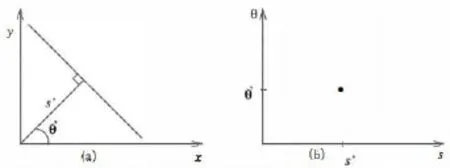
图3 Radon变换原理图
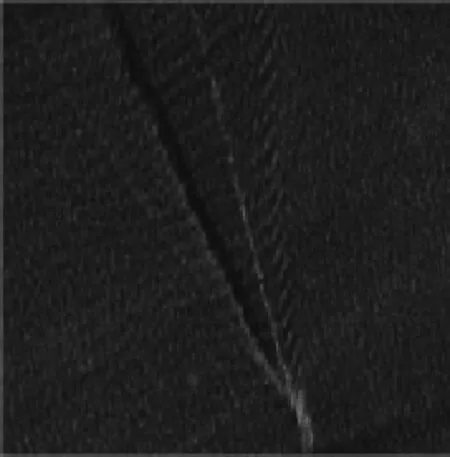
图4 舰船尾迹SAR原图
3 讨论
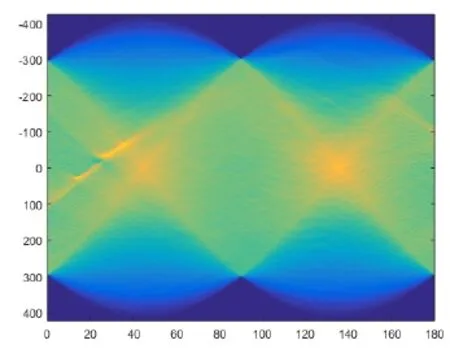
图5 Radon变换域
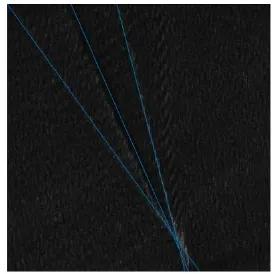
图6 传统Radon变换舰船尾迹检测结果

图7 弯曲的舰船尾迹SAR图像
对于具有“直线型”特征的舰船尾迹,可以通过Radon变换的方法进行检测。但当海面上出现如图7所示的舰船尾迹的时候,传统的Radon变换将变得没有意义。由图可以清晰地看到,湍流尾迹此时呈曲线状而非直线。此时,可以利用数学中“极限”的思想,一条曲线可以看作很多条小线段组合而成的,从而实现检测曲线形状的尾迹。具体方法为:将图像加窗,分为许多幅小图像进行检测;在每一幅小图像中,尾迹曲线可近似为直线,再利用Radon变换进行检测;将这些小图像组合而成即可检测出曲线形状的尾迹。但是这种方法的问题在于:(1)窗的尺寸大小随着尾迹的不同而可能会发生变化,泛化能力较差;(2)由于加了窗进行检测,那么检测速度将会变慢。对于前文所提到的复杂背景下的多尾迹检测也是研究的一个重点,并且更具有实际意义。
当海面上有风速过大,又或是神秘船只潜艇离海面过深时,尾迹的特征将会变得十分微弱,人眼也无法判断是否存在舰船及舰船尾迹。对于这种弱目标的检测是非常前沿的研究,需要研究人员们的努力研究。这时自然而然可以想到是否可以利用现在大热的深度学习的方法来检测舰船尾迹,因为深度学习中的深度卷积网络(Convolutional Neural Networks, CNN)不仅可以提取图像低维的特征,也可以提取图像高维的特征,可以更好地实现目标的识别与分类。
深度学习的概念源于人工神经网络的研究,是含多隐层的多层感知器就是一种深度学习结构。目前,深度学习已成功应用于多种模式分类识别的问题。深度学习对于人类来说潜力巨大。若从深度学习的方法入手检测识别尾迹,则需要利用大量的尾迹SAR图像进行网络的训练。但是现在还没有人研究利用深度学习的方法检测、分类尾迹,主要的原因在于研究人员拥有的真实观测到尾迹的SAR图像数量少,不足以满足大数据的标准。但是毕竟深度学习的网络和方法都在进步,目前在语音方面已经可以达到与人相匹配的程度。所以利用深度学习的方法进行SAR图像目标识别检测是未来的发展趋势。
[1]胡利平. 合成孔径雷达图像目标识别技术研究[D]. 西安电子科技大学, 2009.
[2]种劲松. 合成孔径雷达图像舰船目标检测算法与应用研究[D].中国科学院电子学研究所, 2002.
[3]潘大夫, 汪渤, 周志强. Matlab与C/C++混合编程技术研究[J].计算机工程与设计, 2009, 30(2):465-468.
[4]孙志军, 薛磊, 许阳明,等. 深度学习研究综述[J]. 计算机应用研究, 2012, 29(8):2806-2810.
TN957.52
A
1671-0711(2017)04(下)-0059-03
