自由度下的水下机器人控制器抗干扰设计
2017-05-09张曙光
张曙光,沈 霖
(杭州第一技师学院 电气工程系,浙江 杭州310023)
自由度下的水下机器人控制器抗干扰设计
张曙光,沈 霖
(杭州第一技师学院 电气工程系,浙江 杭州310023)
针对传统的机器人控制器设计容易受到水流冲击压力不定的因素干扰,导致控制器稳定性差、工作效率低下的问题。提出一种6自由度下的水下机器人控制器抗干扰设计方法,通过水下机器人6自由度空间动力学方程,及其在惯性坐标下的6自由度空间动力学方程,并给出水下机器人期望状态的约束条件,获取水下机器人滤波跟踪误差及水下机器人系统的误差动力学方程,以此实现控制器的抗干扰设计,实验结果表明,所提方法下水下机器人控制器的控制误差、位置误差及跟踪误差均小于传统方法。
无线传感网络;水下机器人;控制器;空间动力学
随着海洋经济的迅速发展,可完成海洋资源开发与探测的水下机器人受到了相关学者的广泛关注[1-3]。具有良好动态和稳态性能的控制器是水下机器人实现高质量水下探测的关键[4-8]。尤其是无线传感器网络(Wireless Sensor Network,WSN)等新技术的出现,给相关研究带来了进一步的促进,恰好适用于水下机器人控制器设计领域[9-11]。
但是,在对水下机器人控制器进行设计的过程中,受到水下特殊环境的干扰,水下机器人的控制器容易出现抖振等情况,导致控制器工作存在较大缺陷,无法稳定完成任务[12-15]。
提出一种带有抗干扰功能的水下机器人控制器设计方法,提高水下机器人控制器对神经网络逼近误差与外界干扰的鲁棒性。仿真实验结果表明,所提方法具有很高的稳定性。
1 问题的提出
对目前常用的水下机器人进行控制时,容易受到水流速度的影响,控制出现偏差,其多采用6自由度空间动力学进行处理,则控制方程可描述成:

式中,M用于描述惯性矩阵,其中包含机器人的附加质量;C(v)用于描述控制中的向心力与科氏力矩阵,C(v)表示水动力阻力的升力矩阵;g(η)表示机器人控制中的恢复力矩向量;τd表示外界环境干扰力的力矩向量;J(η)表示控制转换矩阵;η用于描述水下机器人位置的姿态向量;v用于描述水下机器人处于载体坐标系时的速度向量;τ用于描述作用于水下机器人载体坐标系下的控制量向量。
在确定其控制方程的前提下,水下机器人的控制过程必须满足以下约束条件,使控制器模型更准确。其约束条件为:

在水流速度不定的情况下,使用的控制方程无法满足其自身的约束条件时,使得水下机器人的控制模型表达式转变成如下所示:

式中,

但是,此时的水下机器人控制模型无法满足,正常情况下控制模型要满足的以下约束条件:

综上所述存在的问题,需对水下机器人的控制器在抗干扰功能方面进行设计。
2 水下机器人控制参数的设计
在对水下机器人的控制器在抗干扰功能方面进行设计时,需要确定其误差、误差变化率、控制量、加速度向量、速度向量等参数。
首先,基于水下控制规则确定其误差E、误差变化率EGj和控制量Uk,表达式如下所示:


其中,T用于描述控制时间,取T=1 s,ei用于描述时刻的控制偏差值,k用于描述控制次数。
最后,获取速度向量,为水下机器人控制器设计提供依据,速度向量表达式为:

其中:f(G)为机器人可达到的最大速度,dG为水流速率。
3 水下机器人控制器抗干扰设计及实现
3.1 控制器抗干扰的设计
基于上述设置的参数,设计一种带有抗干扰功能的水下机器人控制器。在控制器设计过成功中,假设水下机器人的运动状态存在一定的约束条件,也就是:

式中,ηd用于描述机器人期望的位置向量用于描述机器人的速度向量:用于描述机器人的加速度向量;ηB表示正常数。
在满足其设计条件下,获取水下机器人滤波跟踪误差,并对其进行动态非线性转化,添加抵抗水流产生干扰的性能。其表达式为:

将水下机器人滤波跟踪误差进行动态非线性转化后,表达式变为如下所示:

在提高对水下机器人进行控制时的抗干扰性后,当输入控制量如下所示时,会产生一定的虚拟参考控制路径。
同时产生的虚拟参考控制路径表达式为:

对产生的虚拟参考控制路径,进行一阶求导,获取此时控制水下机器人时产生的控制误差:

式中:Dη表示控制估测值;C为机器人运行时间;C(v)为控制机器人所需时间;vr为机器人运行速度;τd为此时的虚拟路径参考值。
对获取的控制误差进行迭代学习,提高对水下机器人进行控制时的抗干扰性,则有:

式中,ε表示函数逼近误差,同时‖ε‖≤εN,εN,W是正常数;用于描述理想的无线传感网络权值系数。
最终实现水下机器人控制器抗干扰性的设计,其表达式为:

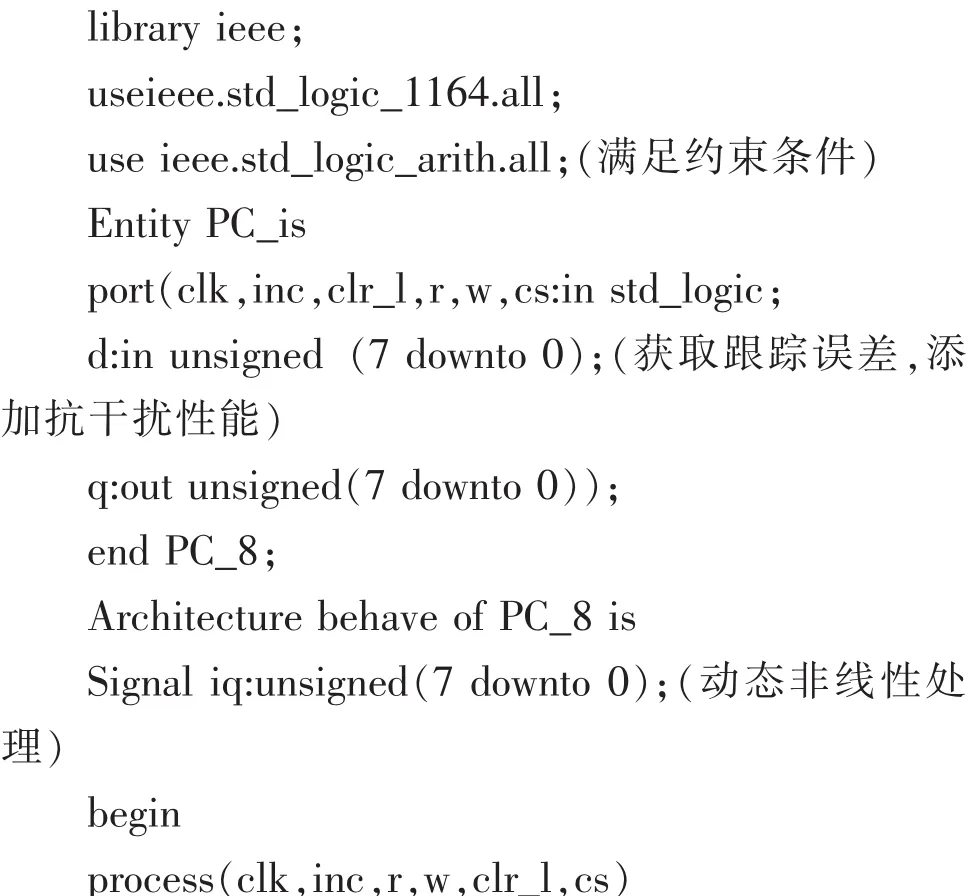
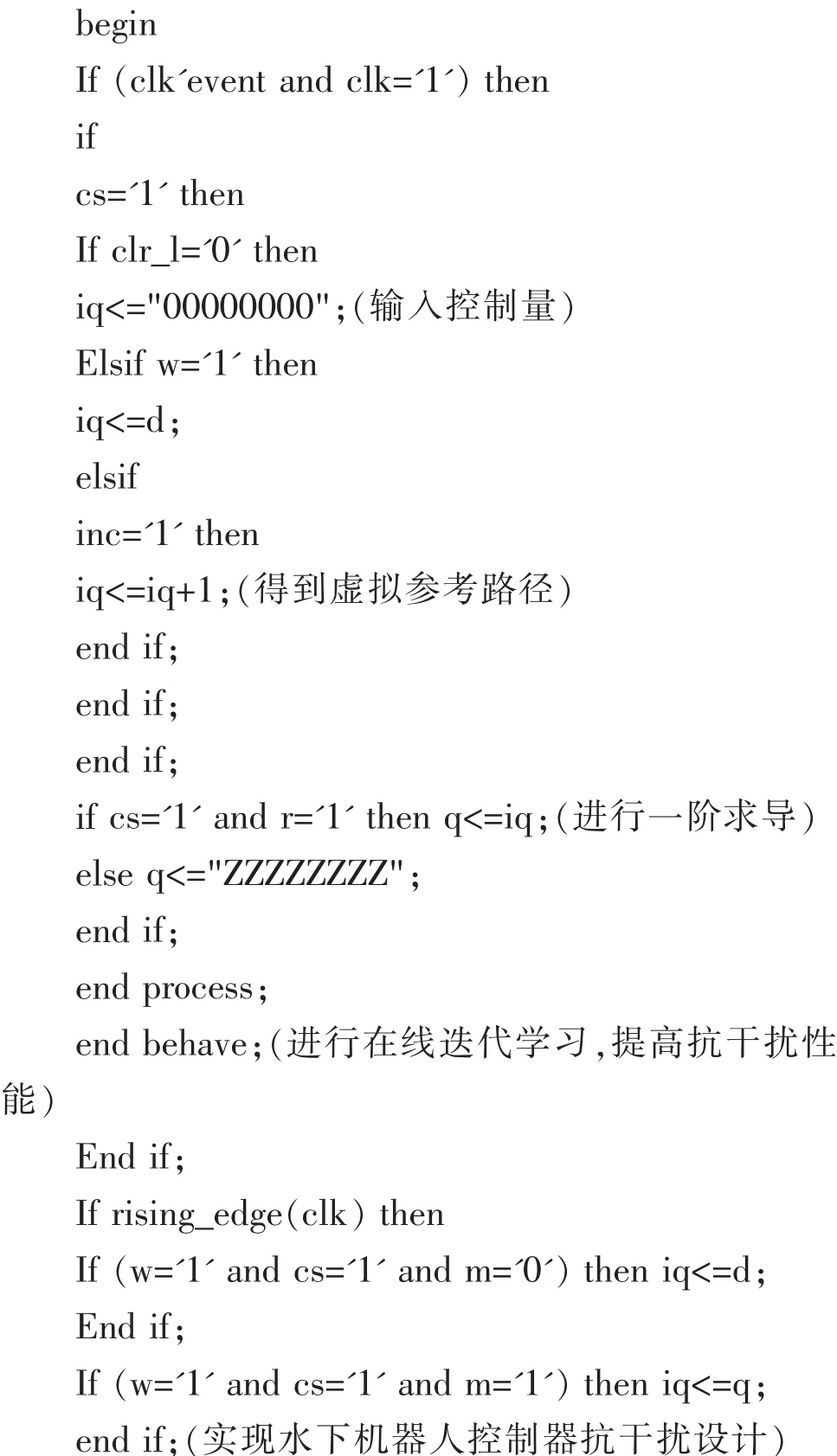
3.2 算法的实现
其软件设计的源代码流程如下:
4 仿真实验结果与分析
为了验证本文方法的有效性,需要进行仿真实验。实验是在慢变海流环境下进行的。水下机器人静止在水面,以大小为3.5×10-3m/s2的初始加速度按照要求进行潜水,波特率为115 200 bps,使用直流电源24 V,控制器电源为5 V,以迭代学习周期为30 s进行迭代学习。
4.1 两种方法下迭代学习的输出值的比对
在时间一定的情况下,对本文方法的迭代学习的输出值进行分析,并与不施加迭代学习的方法进行比对,结果如图1和图2所示。
由图1中可以看出,在进行迭代学习时,实际值随着迭代次数的增加,基本上达到了预期的期望值,最大偏差迅速减小,最终几乎打到了零偏差。
4.2 一定时间下两种方法的控制误差比对
在一定的外界水流干扰下,通过本文方法与传统方法的控制误差值的情况进行比较,进一步验证本文算法的有效性,结果如图3、4所示。

图1 不施加迭代学习后的结果

图2 迭代学习后的结果
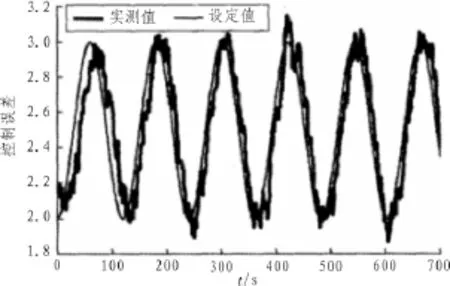
图3 一定时间下传统方法的控制误差

图4 一定时间下本文方法的控制误差
由图3、图4可知,传统方法在受到外界水流环境的干扰时,在一定时间内其实测值与设定值存在一定的误差,抗干扰性差,存在一定的控制误差,导致对水下机器人控制不准确的问题。而文中方法在受到外界水流环境的干扰时,随时间的推移其实测值与设定值刚之间的误差越来越小,抗干扰性好,能够较好的控制误差。
两种方法的位置误差比对在时间一定的情况下,采用本文方法和传统方法对水下机器人控制器在实际使用时的位置误差和跟踪误差进行对比,结果如图5所示。

图5 本文方法和传统方法位置误差比较结果
由图5可知,采用文中方法获取的水下机器人位置误差曲线始终在传统方法误差线之下,说明文中方法设计的控制器在水下机器人上使用时,获取的位置误差小,定位精度高。
4.3 两种方法的跟踪误差比对
分别采用文中方法和传统方法,对控制水下机器人按照给定的轨迹进行跟踪实验,对比结果如图6所示。

图6 本文方法与传统方法的跟踪误差比较
由图6可知,采用文中方法获取的跟踪误差曲线始终在传统方法误差曲线之下,说明文中方法的跟踪误差显著低于传统方法;同时文中方法的跟踪误差曲线较传统方法更加平滑,验证了文中方法设计的水下机器人控制器不仅具有抗干扰的性能,其稳定性相比传统方法也比较高。
5 结束语
文中通过提出在进行设计水下机器人控制器时存在的问题,获得了需要设计的关键所在。经过计算出与设计相关的参数,为设计具有抗干扰性能的水下机器人控制器提供了依据,并设计实现了水下机器人控制器抗干扰性的设计。设计的水下机器人控制器不但具有一定的抗干扰性能,其控制水下机器人的稳定性也具有一定程度的提高,所设计的水下机器人控制器具有一定的实用性。
[1]刘学敏,刘建成,徐玉如.基于最小扰动BP算法的水下机器人运动控制[J].哈尔滨工程大学学报,2013,22(2):20-23.
[2]晏刚,周俊.水下机器人智能控制技术研究综述[J].电子世界,2013(24):21-22.
[3]徐成,曾祺,魏峰.无线传感网络中通用传感器节点硬件结构设计[J].计算机工程与应用,2014,43(8):103-105.
[4]杨坤,李声晋,卢刚,等.基于CAN总线的轮腿式机器人控制系统设计 [J].微特电机,2013(4):28-30,61.
[5]于涌川,原魁,邹伟.全驱动轮式机器人越障过程模型及影响因素分析[J].机器人,2013,30(1):1-6.
[6]徐玉如,苏玉民.关于发展智能水下机器人技术的思考[J].舰船科学技术,2012,30(4):17-21.
[7]李钟群,孙从炎,蒋晓旺,等.水下机器人在浙江省水库大坝检测中的初步应用 [J].浙江水利科技. 2013(3):57-59.
[8]蔡惠智,刘云涛,蔡慧,等.第八讲 水声通信及其研究进展[J].物理,2013(12):1038-1043.
[9]胡牧风,曾涟漪,邵威,等.新型水土采样器及水下机器人的设计 [J].上海理工大学学报,2013,32(4):405-408.
[10]李晔,苏玉民,万磊,等.自适应卡尔曼滤波技术在水下机器人运动控制中的应用[J].中国造船,2013,47(4):83-88.
[11]张文瑶,裘达夫,胡晓棠.水下机器人的发展、军事应用及启示[J].中国修船,2013,19(6):37-39.
[12]杨薇.水下机器人通信与控制技术研究[J].舰船科学技术2015,37(6):206-209.
[13]马晓峰,杜刚,战兴群,等.水下自主导航系统算法设计[J].测控技术,2012,31(3):68-72.
[14]吴乃龙,刘贵杰,李思乐,等.基于人工免疫反馈的自治水下机器人推力器控制[J].机械工程学报,2013,47(21):22-27.
[15]周焕银,刘开周,封锡盛.基于神经网络的自主水下机器人动态反馈控制 [J].电机与控制学报,2013,15(7):87-93.
Underwater robot controller design based on wireless sensor network
ZHANG Shu-guang,SHEN Lin
(Department of Electrical Engineering of The first Hangzhou Technician College,Hangzhou 310023,China)
In view of the traditional robot controller design is vulnerable to water impact pressure variable factors of interference,cause controller poor stability,low efficiency of work.Put forward a kind of 6 degree of freedom under the anti-interference design method of underwater robot controller by underwater robot dynamics equation of six degrees of freedom space,and the inertial coordinates of six degrees of freedom space dynamic equation,and constraint conditions of underwater robot desired state is given for underwater robot filter tracking error and the error dynamic equation of underwater robot system,to realize the anti-jamming design of the controller,the experimental results show that the proposed method of underwater robot controller,position error and control error of the tracking error is less than traditional methods.
wireless sensor network;underwater robots;the controller;spatial dynamics
TN97
:A
:1674-6236(2017)01-0143-05
2015-11-18稿件编号:201511171
张曙光(1979—),男,湖南邵阳人,硕士,讲师。研究方向:检测技术及自动化装置。