空间碎片移除的关键技术分析与建议
2017-05-09刘华伟刘永健谭春林刘育强
刘华伟 刘永健 谭春林 刘育强
(北京空间飞行器总体设计部,北京 100094)
空间碎片移除的关键技术分析与建议
刘华伟 刘永健 谭春林 刘育强
(北京空间飞行器总体设计部,北京 100094)
面向空间碎片的严重威胁,分析了空间碎片移除技术发展的必要性和紧迫性,详细梳理了国内外空间碎片移除的主要技术手段,包括推移离轨、增阻离轨、抓捕离轨3类。推移离轨利用激光、离子束、太阳辐射等能量束作用于空间碎片,产生特定力的作用,使其离开原来的轨道,达到移除的目的。增阻离轨通过增加碎片的飞行阻力,降低碎片轨道高度,进而缩短碎片轨道寿命,使其在规定的时间内离轨再入大气。抓捕移除通过任务飞行器与空间碎片直接物理接触的方式来移除碎片。在此基础上,对比分析了各种移除手段的可行性,并针对几种近期可行的移除手段,分析了其涉及的关键技术问题,并提出了空间碎片移除技术的后续发展建议。
空间碎片;移除;推移离轨;增阻离轨;抓捕离轨
1 引言
空间碎片是指人类在太空活动中产生的废弃物及其衍生物,主要包括废弃航天器、火箭末子级、执行任务过程中的抛弃物、火箭爆炸物、空间飞行器解体及碎片之间相互碰撞产生的碎片等。空间碎片是空间环境的主要污染源,轨道上日益增多的空间碎片必将影响和威胁人类对空间资源的可持续利用,空间碎片移除是未来航天任务必须面对的重要问题[1-5],主要表现在以下四个方面:
(1)空间碎片已经对航天活动构成了严重威胁,对其移除刻不容缓。随着人类对空间研究、开发与应用能力的不断提高,越来越多的空间飞行器被发射入轨,空间日趋拥挤,近地轨道上残留了大量的废弃卫星、火箭末子级、碰撞产生的二次碎片等空间碎片(环地轨道上尺寸在1~10 cm的空间碎片达50多万个)。如果不采取措施,空间碎片将以每年5%的速度递增,近地轨道上的空间碎片已经对航天活动构成了严重威胁,正常工作的飞行器与太空碎片碰撞可能性正逐年增加。俄罗斯“宇宙-2251”卫星与美国“铱星-33”卫星的碰撞事故表明废弃航天器及所形成的空间碎片已经严重威胁到航天活动,对空间碎片的移除刻不容缓。
(2)空间碎片移除是避免再入伤害的有效手段。由于不能有效控制再入轨道和落点,失控航天器(如俄罗斯的进步-M27M货运飞船,进入空间后失控自旋)、空间碎片等飞行体进入大气烧毁后,形成多块残余物,其散落可能造成对地面人员的伤害和设施的破坏。采用空间碎片移除技术,对前述飞行体轨道重定向,通过改变再入轨道来控制其落点,可避免再入伤害和破坏的发生。
(3)轨道资源有限,及时移除轨道碎片是安全高效利用轨道资源的前提。轨道资源有限,特别是GEO轨道,其资源不可替代。GEO轨道上已相当拥挤,其上近千个航天器超过半数已失效,另有火箭末级等250多个,碎片及其它未知物体近400个。移除GEO轨道上的废弃卫星和其它空间碎片,可释放出更多的有效轨道资源,并可提高GEO在役卫星的安全性。
(4)只有及时移除空间碎片,才能保证航天器进入空间通道的畅通。低轨航天器的轨道分布较广,在役航天器、废弃卫星、上面级及其它碎片分布较密集,碰撞概率也相对较高。运行于不同轨道的低轨飞行体相撞击时撞击速度达数千米每秒以上,撞击后产生的大量碎片对空间环境的二次污染将更加严重,分布的碎片云逐步对运行轨道起到封锁效应,从而使航天器进入空间的通道日益受限。只有及时清理空间碎片,避免或减少航天器与空间碎片之间、空间碎片与空间碎片之间发生碰撞,才能减缓和避免空间环境的恶化,保证航天器进入空间通道的畅通。
鉴于空间碎片环境治理的紧迫性,本文详细梳理了国内外空间碎片移除的主要技术手段,包括推移离轨(激光、离子束、太阳帆等)、增阻离轨(膨胀泡沫、充气装置、电动力绳系、静电力等)、抓捕离轨(对接机构、机械臂、柔性网抓等)等3类。在此基础上,对不同的移除手段进行了分析对比,并提出了其涉及的关键技术问题。上述移除技术的分析与梳理,为规划系统长远发展、促进实用化碎片环境治理能力建设提供了指导和支持。
2 空间碎片移除的可能手段
空间碎片具有以下特点:①结构与形状各异(不规则);②尺寸、质量大小不一(尺寸从微米量级到米级,质量从毫克量级到吨级);③运动不规则(自旋、章动)。
由于空间碎片撞击速度可达数千米每秒,因此即使与微米级空间碎片相撞,也可以使航天器表面形成撞击坑,甚至撞击孔,使航天器功能下降或失效。近地空间中这类微米级空间碎片数以百亿计,对此,航天器主要通过加装防护结构进行被动防护。本文的空间碎片移除技术主要对象为厘米级以上空间碎片。
针对空间碎片的特殊几何特性和运动特性,国内外发展了多种技术手段,根据施加作用力的不同,主要可分为推移离轨、增阻离轨和抓捕离轨三类[6],见图1。

图1 空间碎片移除手段按作用力不同分类Fig.1 Space debris removal means classified by the way of force
2.1 推移离轨
推移离轨利用激光、离子束、太阳辐射等能量束作用于空间碎片时的力现象,在碎片运动过程中施加特定力的作用,使其离开原来的轨道,达到移除的目的,主要包括激光推移、离子束推移和太阳帆推移等。
(1)激光推移移除。根据移除的效果,可分为气化移除和气化推移两种方式。其中气化移除是采用大功率连续波激光照射碎片,使其温度升高至升华,实现碎片移除;气化推进是采用高能脉冲激光束照射碎片表面,产生类似于火箭推进的“热物质射流”,从而改变其轨道。激光移除适用于厘米级的小碎片。20世纪90年代,美国、德国等就提出了用强激光移除空间碎片的概念[7-8]。1996年,美国NASA提出了地基激光移除空间碎片的计划(Orion)[9],拟移除1500 km轨道范围内厘米级碎片。在天基激光移除计划方面,早在1989年,美国洛斯阿拉莫斯国家实验室Metzger即提出了天基激光移除碎片方案[10]。2015年,一个国际科学家小组提出利用天基系统解决日益严重的空间碎片问题的方案,拟在“国际空间站”上部署,可以使距离天基系统100 km范围内的空间碎片脱轨,见图2。目前来看,激光移除空间碎片技术已进入关键攻关阶段[11-12]。

图2 激光推移离轨原理示意图Fig.2 Principle diagram of deorbit by laser
(2)离子束推移移除。通过天基离子束系统,即离子束管控卫星,向空间碎片发射高能离子束,产生足够的推力使其离轨。目前,国内外仅开展了少量概念研究[13-15],尚无明确发展计划。
(3)太阳帆推移移除。太阳帆依靠反射自然环境中的太阳光光子产生推力,通过持续累积推力形成大的速度增量,迫使碎片离开原有轨道,实现离轨。碎片轨道的抬升或降低可通过控制太阳帆与太阳光之间的几何关系实现。主要的研究计划是英国的“立方体太阳帆”(CubeSail)计划,通过发射一颗3 kg的纳卫星,试验太阳帆移除空间碎片的技术可行性[16]。
2.2 增阻离轨
增阻离轨通过增加碎片的飞行阻力,降低碎片轨道高度,进而缩短碎片轨道寿命,使其在规定的时间内离轨再入大气,主要包括气动力增阻离轨(如泡沫膨胀增阻离轨、充气装置增阻离轨)、电动力缆绳增阻离轨、静电力增阻离轨等。
(1)膨胀泡沫增阻移除。任务航天器向碎片喷射泡沫,增大碎片面质比,提高气动阻力,使其提早离轨。该方法本质上依赖大气阻力,所以适用于LEO轨道碎片。2011年,欧洲航天局提出了膨胀泡沫增阻离轨的方案设想,如图3所示。
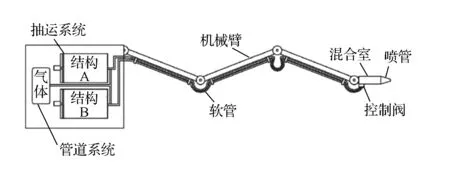
图3 欧洲航天局膨胀泡沫增阻离轨任务星示意图Fig.3 Principle diagram of ESA’s mission spacecraft deorbiting by increasing resistance
(2)充气装置增阻移除。使用充气装置形成气球或抛物面形状,提高气动阻力,迫使卫星提早离轨,适用于LEO轨道碎片移除。2004年,美国贝尔公司提出了“充气加固拖曳结构”(Towed Rigidizable Inflatable Structure,TRIS),由3条支架连接一副大面积的抛物面天线,平时收缩在盒子内,当卫星寿命结束时,充气展开,增加气动阻力、加速卫星离轨,见图4。

图4 TRIS任务示意图Fig.4 Schematic diagram of TRIS
(3)电动力缆绳增阻移除。将导电缆绳附着在空间碎片上,以轨道速度在地磁场中运动,导电缆绳切割磁力线产生洛伦兹力,洛伦兹力的方向与运动速度方向相反而作负功,使碎片降轨移除。适用于低轨碎片移除。2010年,美国国防先进研究计划局(DARPA)提出了“电动碎片移除器”(ElectroDynamic Debris Eliminator,EDDE)计划,见图5,拟通过电动力缆绳+小型绳网移除低轨碎片[17]。日本宇宙航空研究开发机构(JAXA)正在研究“空间碎片微型移除器”(SDMR),通过机械臂抓捕碎片,并展开电动力缆绳,实现增阻离轨[18],见图6。
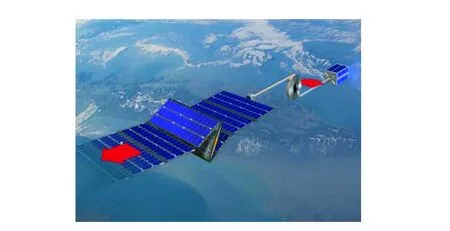
图5 EDDE任务示意图Fig.5 Schematic diagram of EDDE
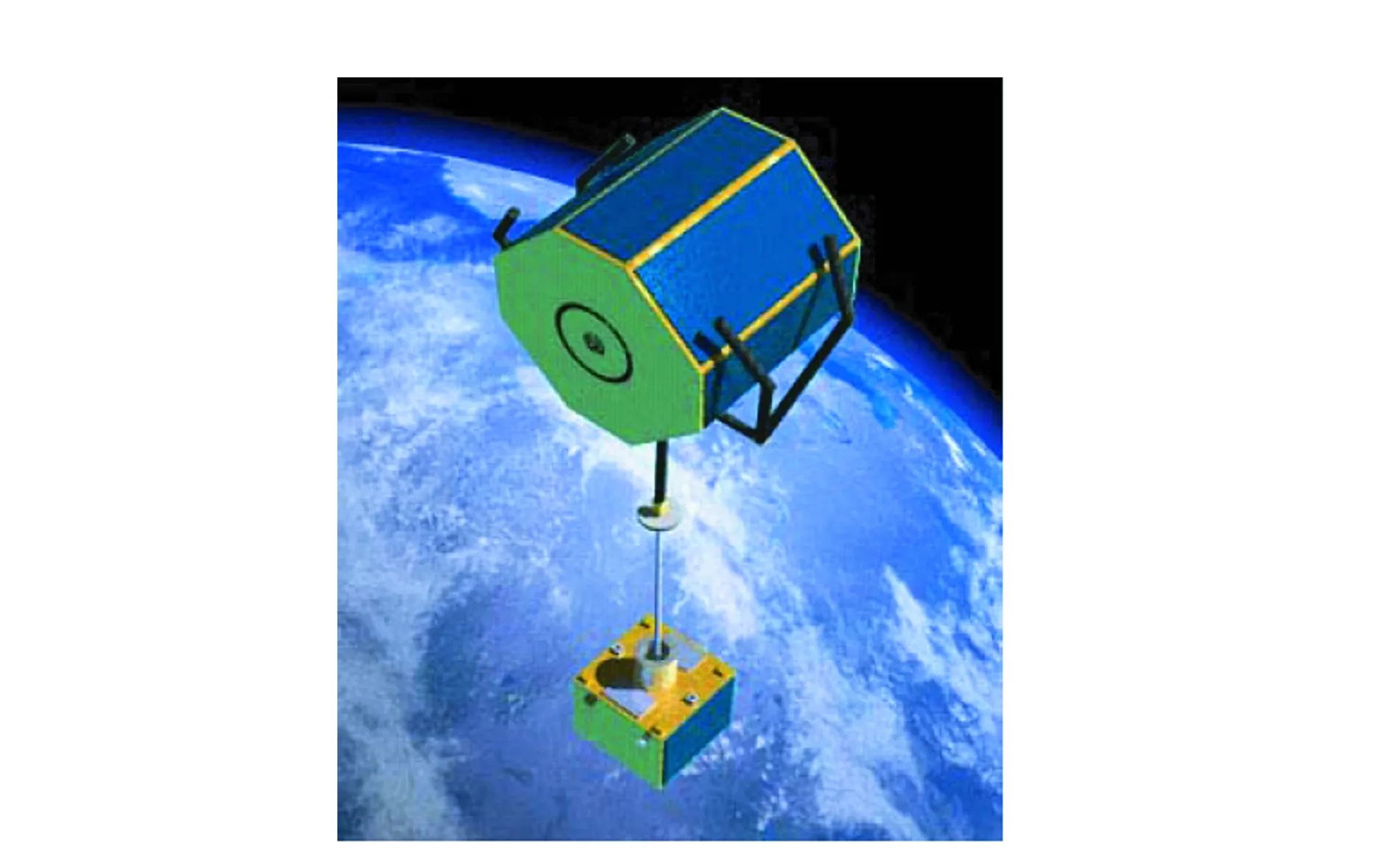
图6 SDMR任务示意图Fig.6 Schematic diagram of SDMR
(4)静电力增阻移除。利用空间等离子体特性,通过任务航天器对碎片进行充电,带电后的碎片在电场静电力作用下减速离轨,实现碎片移除,参见图7。适用于低轨碎片移除。目前,国内外仅开展了少量概念研究[19-20],尚无明确的发展计划。

图7 利用静电力移除空间碎片概念图Fig.7 Conceptual graphs of space debris deorbit utilizing electric force
2.3 抓捕离轨
抓捕移除通过任务飞行器与空间碎片直接物理接触的方式来移除碎片,主要包括以机械臂为代表的刚性抓捕手段[21-24]和以绳网为代表的柔性抓捕手段[25-29]。
(1)对接式抓捕移除。利用远地点发动机喷管捕获机构+星箭对接环锁紧机构抓捕目标,由于捕获机构的专用特征,对接式抓捕的用途较为受限,无法适应形态各异的空间碎片的捕获需求。典型的项目包括DLR和轨道修复公司合作,提出的寿命延长智能航天器(SMART-OLEV)项目(见图8),以及美国ViviSat公司,提出的任务扩展飞行器方案(MEV)(见图9),旨在对寿命末期的静止轨道卫星实施延寿或离轨操作。

图8 SMART-OLEV与目标星的对接示意图Fig.8 Schematic diagram of docking SMART-OLEV and target satellite

图9 MEV与目标星的对接示意图Fig.9 Schematic diagram of docking MEV and target satellite
(2)机械臂抓捕移除。机械臂抓捕通过末端执行机构,抓捕碎片的特定部位(如喷管、对接环、连接螺栓等),进而拖动碎片离轨。由于抓持机构的专用特征,导致其可抓捕的碎片类型受限。利用机械臂抓捕在轨目标的类型按机械臂数量可分为单机械臂抓捕和多机械臂抓捕两类。单机械臂抓捕的典型项目包括欧洲的小型空间机器人系统(ROTEX)(见图10)、自主空间交会与在轨捕获验证计划(TECSAS)(见图11)和德国在轨服务任务(DEOS)(见图12)项目,多机械臂抓捕的典型项目包括美国的通用轨道修正航天器任务(SUMO&FREND)(见图13)和凤凰计划(Phoenix)(见图14)。目前,上述项目均处于地面验证阶段,尚未开展飞行验证。

图10 ROTEX项目Fig.10 Project ROTEX

图11 TECSAS项目Fig.11 Project TECSAS

图12 DEOS项目Fig.12 Project DEOS

图13 SUMO & FREND项目Fig.13 Project SUMO & FREND

图14 凤凰计划Fig.14 Project Phoenix
(3)柔性网/爪抓捕移除。通过绳网、口袋、鱼叉等装置实现对目标的柔性抓捕,不需要考虑特定的抓捕位置,可适用于不同形状、尺寸的碎片抓捕。在网捕方面,具有代表性的项目有美国TUI公司的“抓捕、取回、固定有效载荷”可展开网捕捉器 (Grapple,Retrieve,and Secure Payload,GRASP),见图15,日本的新型空间绳网系统(Furoshiki),见图16,美国的小行星重定向项目(Asteroid Redirect Mission,ARM),见图17,欧洲航天局的机械人地球静止轨道复位器项目(Robotic Geostationary Orbit Restorer,ROGER),见图18,及其后续项目主动碎片移除计划(e.Deorbit),见图19,同时ROGER及e.Deorbit在绳爪方面的研究也是具有代表性的。

图15 GRASP项目Fig.15 Project GRASP

图16 Furoshiki项目Fig.16 Project Furoshiki

图17 ARM项目Fig.17 Project ARM

图18 Roger项目网捕获器与绳爪机构概念图Fig.18 Conceptual graphs of catcher and rope-claw mechanisms for project Roger

图19 e.Deorbit项目抛射式飞网捕获和鱼叉捕获装置示意图Fig.19 Schematic diagram of projectile maneuvering-net mechanism and harpoon mechanism for project e.Deorbit
3 各种空间碎片移除手段对比分析
表1从移除对象、移除时效性及技术成熟度等三个方面对各种空间碎片移除手段进行了初步的比较分析。从表1分析,可得到以下结论:
(1)激光推移手段适用于厘米级小碎片移除,目前正在开展地面关键技术攻关,具有一定的技术基础;
(2)充气增阻及电动力缆绳增阻手段适用于低轨大尺寸碎片移除,具有较好的技术基础,可考虑作为后续低轨卫星寿末自主离轨的通用化产品;
(3)刚性机械臂及柔性网爪等抓捕移除手段适用于高、中、低各个轨道的大尺寸碎片目标,可操作性强,技术相对成熟,易于工程实现,是当前实施空间碎片移除的优选技术途径。
针对几种抓捕移除手段,开展进一步的比较分析,如表2所示。

表1 各种空间碎片移除手段比较分析
注:无特殊说明,本文中大型碎片指的是分米级以上碎片,小型碎片指的是分米级以下碎片;移除周期较短指的是周期以天计或以小时计,移除周期较长指的是周期以年计。

表2 各种抓捕移除手段的对比分析
对比各种抓捕移除手段,可知柔性绳网应用于空间碎片抓捕移除,具有对目标适应性好、安全性高等优势,其原因在于绳网/口袋等形式的柔性载荷不需要对准特定的抓捕位置,而是空间覆盖式抓捕,误差冗余大,对碰撞与冲击不敏感,轻度的碰撞与冲击不会造成系统的大范围不稳定,特别适合于对于空间碎片的抓捕移除。
4 空间碎片移除的关键技术分析
由上节各种空间碎片移除手段的比较分析可知,当前可行的移除手段包括激光推移、充气增阻、电动力缆绳增阻、机械臂抓捕、柔性绳网抓捕等,下面,针对上述碎片移除技术手段,分析其涉及的关键技术。
(1)无论是天基还是地基,激光推移移除空间碎片需要解决的关键技术主要有3个:①高功率激光器技术,包括高光束质量、大功率、高稳定性激光器。天基移除还必须考虑系统的体积、质量、功耗及空间环境的适应性等。②捕获跟踪瞄准技术,需要能够稳定捕获、跟踪、瞄准并将激光束精确地发送到数百公里之外的空间碎片上,要求捕跟控制精度达到微弧度甚至更小。③激光与物质作用效能分析。激光与物质作用效能的高低取决于激光与碎片作用的冲量耦合系数,如何选取最优的参数配置,是一项非常复杂且重要的工作。
(2)充气增阻移除需解决的关键技术包括:①充气展开材料技术,从材料的使用角度考虑,要求其具有轻质、柔性、耐高温、抗辐射、气密性好和易刚化等特点。②充气结构折叠/展开技术,旨在尽可能地减小充气展开式结构在发射过程中所占用的体积,另一方面则是保证充气展开式结构在空间稳定可靠的展开,包括结构包装的方式、充气方式的选择和充气展开方式的选择等。
(3)电动力缆绳增阻移除需解决的关键技术包括:①缆绳材料选择与空间耐受性分析,缆绳材料的选择主要取决于材料是否有相对较低的电阻率和较小的密度,实际应用中还要考虑成本、强度、熔点以及空间环境适应性问题。②缆绳展开机构技术,需要设计一种弹射机构,使初始处于卷绕状态的缆绳以一定的速度完全展开,并确保展开过程的有序与可靠。③空间环境电荷收集技术,电动力缆绳的电荷收集能力,尤其是在带电粒子浓度较低区域运行时的电荷收集能力,直接影响着系统的离轨效率,如何有效提升其集电能力是电动力缆绳应用于空间碎片移除需要解决的关键问题。
(4)机械臂抓捕移除需解决的关键技术包括:①空间碎片目标特性测量建模技术,对空间碎片实施超近距离接触式操作,首先必须解决目标特性测量和运动状态确定问题,获取碎片的大小、整体特征等信息,并进一步确定其旋转角速度、转轴指向、章动幅度等运动参数。②空间碎片特定抓捕位置辨识技术,要实施抓捕,就必须解决对抓捕位置的识别和跟踪测量问题,包括具体操作点的位置,如对接环、发动机喷管、太阳翼板架等,以及对抓捕位置的相对位置解算问题。③强适应性末端抓捕机构技术,设计专用的碎片抓捕末端执行机构,可适用于不规则形状物体抓捕、发动机喉管捕获、对接框捕获等。④空间碎片主动消旋技术,对于大质量/惯量的空间碎片,当旋转/翻滚速度很快时,直接抓捕会产生较大的力和力矩冲击,需要在短时间内迁移的动量/能量非常大,甚至可能造成操作机构和任务平台损毁,因此必须首先对空间碎片进行主动消旋。
(5)柔性绳网抓捕移除需解决的关键技术包括:①柔性绳网动力学技术,与通常的刚性空间结构相比,空间绳网系统具有极度柔软、极易出现变形、松弛与缠绕的特点,属于典型的非线性动力学系统,是动力学仿真的一个难题,目前国内外多见单根绳索的仿真研究,采用的方法多为弹簧-集中质量法或有限段等简化动力学模型方法,需要研究高精度、高效率绳网动力学建模方法。②大型柔性绳网收贮与防缠绕技术,与地面网体不同,空间绳网在设计上有着轻质、高强度、高展收比和高易展性要求,需要选择空间环境适应性强的材料,研究合理的绳网编制工艺与打结方式,设计可靠的折叠封贮方案,避免绳网压缩后的网目之间出现纠缠与穿透现象,确保发射展开过程无缠绕。③柔性绳网低冲击精准发射技术,在几十到上百米的距离上,小的发射误差,将造成目标位置上网形的较大偏差,会导致绳网抓捕的失败,同时发射冲量将会对平台姿态控制系统提出较高要求,要求发射系统具有发射同步性高、发射速度大小与方向控制精准、对平台冲击小等特点。④绳系组合体轨道机动与控制技术,柔性绳网抓捕碎片后,通过连接两者的系绳构成了单边约束的多体系统,其运动规律较为复杂,需要建立柔性复杂组合体的姿态和轨道动力学模型,充分考虑拖曳过程中组合体章动、绳系系统的面内外摆动、组合体的姿态轨道运动的强耦合以及碎片自身运动的干扰等问题。
5 后续发展建议
(1)应大力开展抓捕离轨/推移离轨等空间碎片主动移除技术研究,研制空间碎片移除航天器。柔性抓捕以抓捕容差大、与目标间无刚性碰撞等特点在空间碎片移除方面具有较大的潜在应用优势,柔性绳网抓捕已有较好的技术基础,后续建议重点发展空间柔性绳网碎片移除技术;机械臂技术发展迅速已逐步实现在轨应用,是一种可能的针对大型碎片(废弃卫星)抓捕移除的技术手段,后续建议重点发展具有多自由度和冲击减缓特性机械臂技术。激光是当前最可行的针对20cm以下小碎片移除的技术手段,后续建议重点发展天基激光推移小碎片移除技术。
(2)统一布局,推动空间碎片自主离轨技术的发展。发展航天器自主离轨通用化产品,通过气动力、电磁力等手段使航天器在寿命末期快速降轨再入,后续需重点发展充气装置增阻离轨技术和电动力系绳增阻离轨技术。
(3)采取三步走的发展策略。第一步,突破机械臂抓捕与柔性绳网抓捕核心关键技术,开展飞行验证,完成针对高轨废弃卫星的移除试验;第二步,突破天基激光推移和充气装置及电动力系绳增阻离轨技术,开展危险碎片移除试验,具备对厘米级碎片移除能力和航天器自主离轨能力;第三步,构建较为完善的高低轨碎片移除系统,发展多种碎片移除技术手段,形成业务化碎片移除能力。
References)
[1] 王超,董正宏,尹航,等. 空间目标在轨捕获技术研究综述[J]. 装备学院学报,2013,24(4): 63-66
Wang Chao,Dong Zhenghong,Yin Hang,et al. Research summarizing of on-orbit capture technology for space target[J]. Journal of Academy of Equipment,2013,24(4): 63-66 (in Chinese)
[2]李新刚,裴胜伟. 国外航天器在轨捕获技术综述[J]. 航天器工程,2013,22(1): 113-119
Li Xingang,Pei Shengwei.On-orbit capture technology of spacecraft[J]. Spacecraft Engineering,2013,22(1): 113-119 (in Chinese)
[3]Bekey I. Orion’s laser: hunting space debris[J]. Aerospace America,1997,35(5): 38-44
[4]Johnson N L. Developments in space debris mitigation policy and practices[J]. J Aerospace Engineering 2007,221(6):907-909
[5]Marshall H K. Survey of space debris reduction methods[C]// AIAA Space 2009 Conference & Exposition. Washington D.C.: 2009: 14-17
[6]李怡勇,王卫杰,李智,等. 空间碎片清除[M]. 北京: 国防工业出版社,2014
Li Yiyong,Wang Weijie,Li Zhi,et al.Space debris removal[M]. Beijing: National Defense Industry Press,2014 (in Chinese)
[7]Sforza P M. Laser system for spacecraft hull protection[C]// 42nd International Astronautical Congress. Paris:International Astronautical Congress,1991:10-12
[8]Schall W O. Orbital debris removal by laser radiation[J]. Acta Astronautica,1991,24: 343-351
[9]Phipps C R,Albrecht G. Orion: clearing near-earth space debris using a 20kW,530nm,earth based,repetitively pulsed laser[J]. Laser and Particle Beams,1996,14(1): 1-44
[10] Metzger J D,Leclaire R J,Howe S D,et al. Nuclear-powered space debris sweeper[J]. Journal of Propulsion and Power,1989,5(5): 582-590
[11]Campbell J W. Project Orion: orbital debris removal using ground-based sensors and lasers[R]. Huntsville:NASA Technical Memorandum,1996
[12]Phipps C R,Baker K L. Removing orbital debris with laser[J]. Advances in Space Research,2012,49(7): 1283-1300
[13]Kitamura S. Large space debris reorbiter using ion beam irradiation[C]// 61stInternational Astronautical Federation. Prague: International Astronautical Federation,2010:725-735
[14]Bombardelli C,Peláez J. Ion beam shepherd for contactless space debris removal[J]. Journal of Guidance,Control,and Dynamics,2011,34(3): 916-920
[15]Bombardelli C,Urrutxua H,Merino M,et al. Dynamics of ion-beam-propelled space debris[C]// 22ndInternational Symposium on Space Flight Dynamics. São José dos Campos: International Symposium on Space Flight Dynamics,2011:1-13
[16]侯英. 英国研究利用太阳帆处理太空轨道碎片[J]. 国防科技情报,2010(9): 15
Hou Ying.The study of space debris removal using solar sails in England[J].National Defense Science and Technology Intelligence,2010(9): 15 (in Chinese)
[17]Pearson J,Levin E,Oldson J. Electro dynamic debris eliminator (EDDE)—design,operation,and ground support[R]. Hawaii:Advanced Maui Optical and Space Surveillance Technologies Conference,2010
[18]马楠,贵先洲. 国外空间碎片清除计划[J]. 国际太空,2013(2): 64-69
Ma Nan,Gui Xianzhou.Foreign space debris removal program[J]. Space International,2013(2): 64-69 (in Chinese)
[19]Toyoda K,Furukawa Y,Okumura T,et al. Preliminary investigation of space debris removal method using electrostatic force in space plasma,2009-1487[R]. Washington D.C.: AIAA,2009
[20]Toyoda K,Sasaki R,Cho M. Experimental investigation of space debris removal method using electrostatic force in space plasma,2012-0874[R]. Washington D.C.: AIAA,2012
[21]翟光,仇越,梁斌,等. 在轨捕获技术发展综述[J]. 机器人,2008,30(5): 467-478
Zhai Guang,Qiu Yue,Liang Bin,et al. Development of on-orbit capture technology[J]. ROBOT,2008,30(5): 467-478 (in Chinese)
[22]翟光,张景瑞,周志成. 静止轨道卫星在轨延寿技术研究进展[J]. 宇航学报,2012,33(7): 849-859
Zhai Guang,Zhang Jingrui,Zhou Zhicheng. A review of on-orbit life-time extension technologies for GEO satellites[J]. Journal of Astronautics,2012,33(7): 849-859 (in Chinese)
[23]Martin É,Dupuis É,Piedboeuf J C,et al. The TECSAS mission from a Canadian perspective[C]// ISAIRAS 2005 Conference. Quebec:Canadian Space Agency,2005:1-8
[24]Sommer B. Automation and robotics in the german space program-unmanned on-orbit servicing (OOS) & the TECSAS mission[C]// The 55th International Astronautical Congress. Paris: International Astronautical Congress,2004:1-18
[25]Yu Y,Baoyin HX,Li JF. Dynamic modeling and analysis of space webs[J]. Sci China Phys Mech Astron,2011,54(4): 783-791
[26]Nakasuka S,Sahara H,Nakamura Y,et al. Large "Furoshiki" net extension in space—sounding rocket experiment results[J]. Automatic Control in Aerospace,2007,17(1): 485-490
[27]Brophy J R,Friedman L,Culick F. Asteroid retrieval feasibility[C]// 2012 IEEE Aerospace Conference. New York: IEEE,2012: 1-16
[28]Bremen A S. Robotic geostationary orbit restorer (ROGER) phase: a final report[R]. Paris: ESA,2003
[29]Wieser R,Haarmann G,Hausmann R,et al. e.Deorbit Mission: OHB Debris removal concept[C]// The 13thSymposium on Advanced Space Technologies in Robotics and Automation. Noordwijk: The Symposium on Advanced Space Technologies in Robotics and Automation,2015: 1-6
(编辑:张小琳)
Analysis and Suggestion on Key Technology of Space Debris Removal
LIU Huawei LIU Yongjian TAN Chunlin LIU Yuqiang
(Beijing Institute of Spacecraft System Engineering,Beijing 100094,China)
In the face of the serious threat of space debris,the necessity and urgency of the development of the space debris removal technology is analyzed in this paper. At the same time,the main technical means of the space debris removal at home and abroad is combed in detail,including deorbit by translation,deorbit by increasing the resistance,deorbit by capturing. Deorbit by translation takes advantages of the energy beam resulting from the laser,the ion beam,the solar radiation and so on,which exert the specific force on the space debris in the process of the movement then make the space debris leave from its original orbit. Finally by these means the purpose of space debris removal is achieved. Deorbit by increasing the resistance means increasing the space debris flying resistance which results in the decreasing of the space debris orbital altitude and the reduction of the space debris orbital lifetime,and makes the space debris into the atmosphere again in the prescriptive time. Deorbit by capturing removes the space debris by the direct physical contact of the mission spacecrafts. Then the feasibility of all kinds of the removal means is compared and analyzed,and the key technology of the means which is feasible recently is also analyzed. At last,the suggestions about the subsequent development of the space debris removal technology are proposed.
space debris; removal; deorbit by translation; deorbit by increasing the resistance; deorbit by capturing
2017-01-13;
2017-03-21
刘华伟,女,博士,工程师,研究方向为航天器总体设计。Email:lhw5646653@126.com。
V528
A
10.3969/j.issn.1673-8748.2017.02.015
