基于紧支集双正交小波的芯片焊点定位技术研究
2017-05-08方舟董浩赵晓龙��
方舟+董浩+赵晓龙��
摘要:芯片封装是保护芯片和增强芯片电热性能的重要工艺,在芯片粘贴在引线框架的贴片基板上后,用金属引线将芯片焊点与引线框架的管脚连接起来实现芯片功能。为了提高芯片引线键合的精度,确保键合机的焊头能够实现准确定位,采用基于紧支集双正交小波的多分辨率分析方法实现芯片和贴片基板边缘的快速检测和特征匹配,实现芯片和引线框架焊点的快速定位。这种方法能够实现芯片图像边缘特征的准确提取、识别和特征匹配。采用紧支集双正交小波进行芯片焊点和引线框架定位时,简化了算法的复杂度,提高了芯片引线框架焊点位置的检测效率和定位精度。
关键词:芯片封装;引线键合;小波;焊点定位
中图分类号:TP391文献标识码:ADOI:10.3969/j.issn.10036199.2017.01.028
1引言
芯片封装是在引线框架的外接管脚与芯片焊点之间建立可靠的连接,实现芯片的功能[1]。目前常用的芯片封装技术包括三种方法:引线键合、载带自动焊和倒装芯片技术[2]。在三种方法中由于引线键合技术具有成本低、精度高、可靠性好的优点,因此,90%以上的芯片封装都采用的是引线键合形式。引线键合焊点的视觉定位就是首先通过视觉系统获取芯片和贴片基板的数字图像,从中提取出芯片和基板的实际中心坐标参数。计算出芯片和基板相对于预定义位置的坐标偏差和角度偏差。通过定位偏差参数实时计算芯片和引线框架焊点的实际坐标位置,实现芯片引线键合焊接劈刀定位误差的在线修正[3]。
芯片的封装工艺中需要将芯片粘贴在引线框架的贴片基板上,贴片机吸取芯片后将其放在基板上,由于取片和放片时存在误差,导致芯片在基板上存在位置偏差。这种误差的出现,在引线键合时会导致键合劈刀无法准确定位到芯片焊点的焊接位置。这种情况将导致金属引线的焊球焊接不牢或者定位不准确,导致芯片的可靠性下降甚至失效。为了提高芯片的引线键合精度,本文采用构造多尺度小波变换的方法提取芯片和基座的边缘信息,实时检测芯片和贴片基板的边缘;计算芯片和贴片基板边缘的中心坐标和偏转角度;为焊点实时定位和焊接劈刀的实时调整定位提供参数。
2基于小波变换的边缘提取
通过CCD数字相机采集到的芯片图像经过预处理后,采用基于小波分析的多尺度图像分析的办法提取芯片和引线框架的边缘特征。通常图像特征局部的不连续称为“边缘”。就灰度突变性而言,图像的边缘一般分为两大类,一类是阶跃状边缘,其特征是边缘两边象素的灰度值有显著的不同;另一类是屋顶状边缘,其特点是它位于灰度值由增加到减小的变化转折点。在阶跃边缘点,图像灰度在它两旁的变化规律是灰度变化曲线的一阶导数在该点达到极值,二阶导数在该点近旁呈零交叉,即其左右分别为一正一负两个峰;对于屋顶状边缘的边缘点,其灰度变化曲线的一阶导数在该点近旁呈零交叉,二阶导数在该点达到极值。
5芯片特征识别与测试
本文在MATLAB软件平台上开发芯片引线键合焊点的定位检测程序。首先从数字相机读取芯片图片,在采集芯片照片时设置环境光源,使得芯片处于良好的光照环境下。调整数字相机的镜头取景范围,使芯片及其贴片基座尽量处于最大的取景范围,使芯片图像有较大的分辨率。采集到数字图像后,根据数字相机的畸变校正矩阵[9]修正数字图像误差;然后通过图像预处理技术[10]初步消除图像中的干扰信息;其次采用图像灰度处理[11]将其转化为灰度图像;再采用数字形态学技术消除芯片图像上的微小孔隙,消除边缘检测过程中出现的亢余信息,完成数字图像预处理过程。
将预处理过的图像进行多分辨率分析,由边缘检测算法得到的边缘信息保存到链表结构中,链表的每一行就保存一条边缘。首先,在链表中查找被断开的边缘,并将断开的边缘重新连接起来,形成完成的边缘。其次,将拼接起来的边缘进行平移和旋转不变性处理,使得图像特征中的芯片和基板的边缘特征转化为具有不变性的封闭曲线。第三,在实时提取到的芯片和基板边缘曲线进行不变性处理并提取其小波特征后,将模板的小波特征与实时图像中的边缘特征参数进行对比,从而在采集到的图像中识别出芯片和贴片基板的边缘。最后通过计算边缘曲线的矩特征参数,计算出芯片和基板对应的偏移参数。
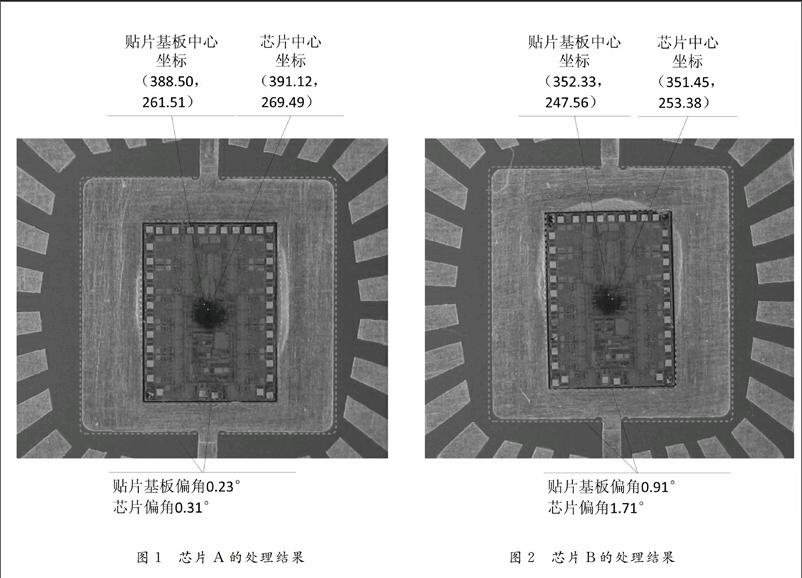
以任意两幅图片为例,芯片和贴片基板中心坐标检测实验以芯片和基板周边一定范围为拍摄区域,如图1和图2所示。如前所述,芯片在粘贴在引线框架的贴片基板上时存在贴片误差,在这两个随机选择的芯片贴片图像中芯片相对于基板的位置并不固定。这种误差将导致在引线键合时,焊接劈刀无法与芯片和引线框架的焊点精确对准,这种误差将导致芯片可靠性降低甚至残片。计算出芯片和贴片基板的位置偏移量之后,可以根据偏移量计算出芯片和引线框架上的焊点位置[12]。此时计算出的焊点坐标是采用像素为单位的坐标参数,通过对数字相机的标定,可以计算出焊点的实际位置参数(单位:mm)。
6结论
芯片粘贴在引线框架后,为解决芯片和基座几何中心坐标与设备坐标系中理论坐标偏差和轴向偏角实时测量,以及实时修正芯片的键合焊点的位置提高引线键合质量的问题,文中提出采用基于紧支集双正交小波的方法实现边缘提取和边缘特征识别。通过实验表明,该算法能快速、准确的将芯片边缘和贴片基板的边缘从图像中识别出来;并根据两者的中心位置偏差计算出焊点的实际位置,修正参数反馈给键合头驱动系统。这种算法能够提高引线键合工艺中的焊接质量,简化了特征提取的步骤,缩短了算法的复杂度,提高了算法的精确度。
参考文献
[1]丁汉, 朱利民, 林忠钦.面向芯片封装的高加速度运动系统的精确定位和操作[J].自然科学进展, 2003, 13(6): 568-574.
[2]李可为.集成电路芯片封装技术[M].北京:电子工业出版社,2007:19.
[3]李君兰.面向IC封装的计算机视觉定位系统的研究[D].天津大学碩士学位论文,2007.
[4]ALPHA K, 彭嘉雄.小波多尺度方法用于边缘检测[J].华中科技大学学报:自然科学版, 2001,29(5):74-76.
[5]胡敏, 陈强洪.多尺度分析方法中四种典型小波基的选择与比较[J].微机发展, 2002,12(3):41-44.
[6]常辉, 胡荣强.基于B样条小波的图像边缘检测[J].武汉理工大学学报:信息与管理工程版, 2002,24(3):31-33.
[7]刘曙光, 朱少平.B样条正交小波的构造[J].纺织高校基础科学学报,2001,14(2):147-153.
[8]张德干, 高光来.通用双正交小波构造方法的研究[J].内蒙古大学学报:自然科学版, 1999,30(5):662-670.
[9]丁婷婷, 方舟, 刘波,等. 基于机器视觉检测的摄像机快速标定与误差分析[J]. 制造业自动化, 2015,37(1):89-91.
[10]李刚, 范瑞霞.一种改进的图像中值滤波算法[J].北京理工大学学报,2002,22(3):376-378.
[11]吴冰, 秦志远.自动确定图像二值化最佳阈值的新方法[J].测绘学院学报,2001,18(4):283-286
[12]王娟, 方舟, 刘波, 等. 面向IC封装的机器视觉定位算法研究[J]. 制造业自动化,2014,36(4):75-79.
第36卷第1期2017年3月计算技术与自动化Computing Technology and AutomationVol36,No1Mar. 2 0 1 7第36卷第1期2017年3月计算技术与自动化Computing Technology and AutomationVol36,No1Mar. 2 0 1 7
