基于改进人工势场法的移动机器人导航控制
2017-05-08李国进陈武易丐��
李国进+陈武+易丐��
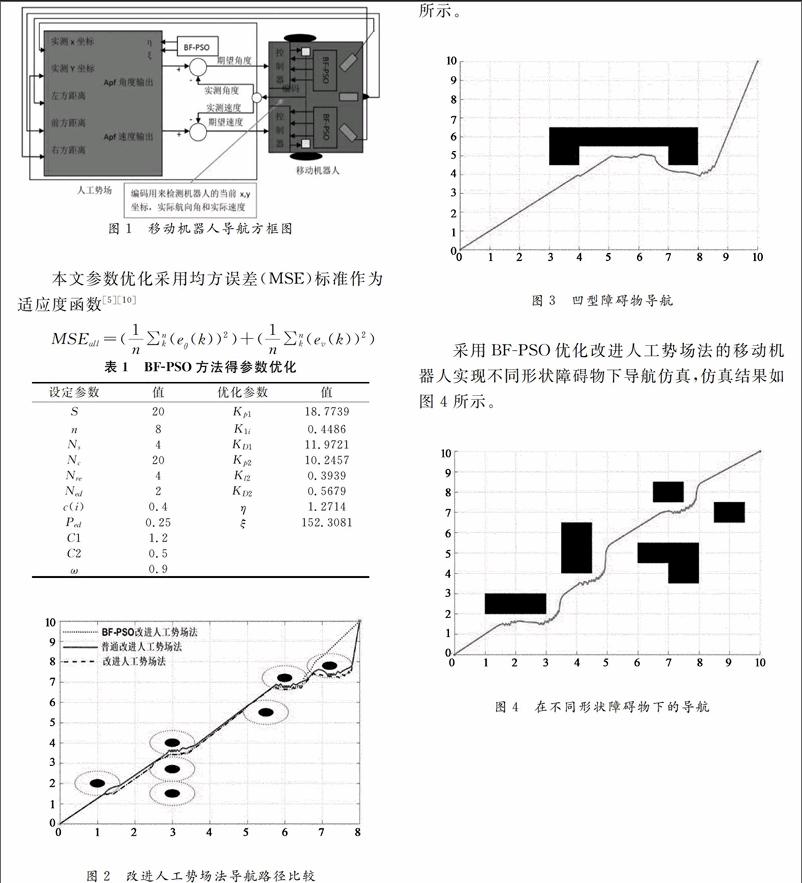
摘要:传统人工势场法在移动机器人导航过程中存在局部极小值,障碍物周围震荡等问题。针对采用传统人工势场法实现移动机器人导航过程中存在的问题,本文引入旋转力改进人工势场法,同时运用细菌觅食混合粒子群算法(BF-PSO)对移动机器人导航过程中的控制器参数及势场函数增益系数进行离线优化。运用优化参数进行基于改进人工势场法的移动机器人导航的仿真,仿真结果表明BF-PSO算法对移动机器人导航具有较好的优化效果。
关键词:导航;改进人工势场法;PID控制器;BFPSO
中图分类号:TP242文献标识码:ADOI:10.3969/j.issn.10036199.2017.01.011
1引言
移动机器人导航是机器人研究的一个重要问题。人工势场法因其计算简单明了而被广泛的应用在移动机器人导航上,但由于传统人工势场法存在固有局限性[1], 导致移动机器人在导航过程中存在着如下问题,一个是存在局部极小值;另一个是路径在障碍物前震荡,出现机器人呈锯齿形前进[2] [3]。
通过分析传统人工势场法存在的不足,本文引入一种添加旋转力的改进人工势场法。该方法在保留传统人工势场法的基础上解决了传统人工势场法存在部分问题。但由于移动机器人在移动的过程中,机器人的移动方向和速度在一定程度上受控制系统和势场函数增益系数的影响,且这些参数均由人为设定,因此存在优化空间。故本文采用BFPSO算法对移动机器人的两个PID控制器参数和势场函数的增益系数进行离线优化。
2传统人工势场法
人工势场包括两部分,分别是目标产生的引力势场和障碍物产生的斥力势场[4]。目标点对机器人产生吸引力,大小与目标到机器人的距离成正比,方向由机器人指向目标点;障碍物对机器人产生排斥力,大小与障碍物到机器人的距离成反比,方向是由障碍物指向机器人。这两种力的矢量和将产生一个合力的大小和方向,使得机器人能跟随这个方向成功的避开障碍物,顺利到达目标点。
3改进人工势场法
针对传统人工势场法的存在局部极小值和障碍物周边震荡问题,本文采用一种添加旋转力的改进人工势场法,从斥力函数上加以改进。
通过斥力势场乘以一个不小于0的多项式,使得移动机器人到达目标点时这个多项式为0。当两个正势场均在目标点取到0时,达到全局最小值。文献[4]中取这个不小于0的多项式为机器人到目标点距离的平方。这种形式的斥力势场在保证目标点全局最小的情况下,导致机器人不在目标点附近时,极大的扭曲了斥力势场的形状。因此本文采用改进变量多项式,使得机器人不在目标点附近时,最小化扭曲障碍物势场,同时保证机器人在目标点在目标点取全局最小。
由图2不难发现一般的改进人工势场法,在一定程度上解决了移动机器人的局部极小值问题,实现了目标可达。但导航路径不够平滑,存在较大的不良震荡。本文采用的添加旋转力的改进人工势场法,不仅解决了人工势场法在移动机器人导航过程中存在的局部极小值问题,同时减轻了障碍物前的震荡,仿真得到一条相对较平滑的移动路径。采用BF-PSO算法对移动机器人控制器PID参数和势场函数的增益系数进行离线优化,运用优化参数进行改进人工势场法的移动机器人导航仿真,仿真得到了一条平滑的导航路径,减轻了导航过程中出现的不良震荡,成功抵达目标点。
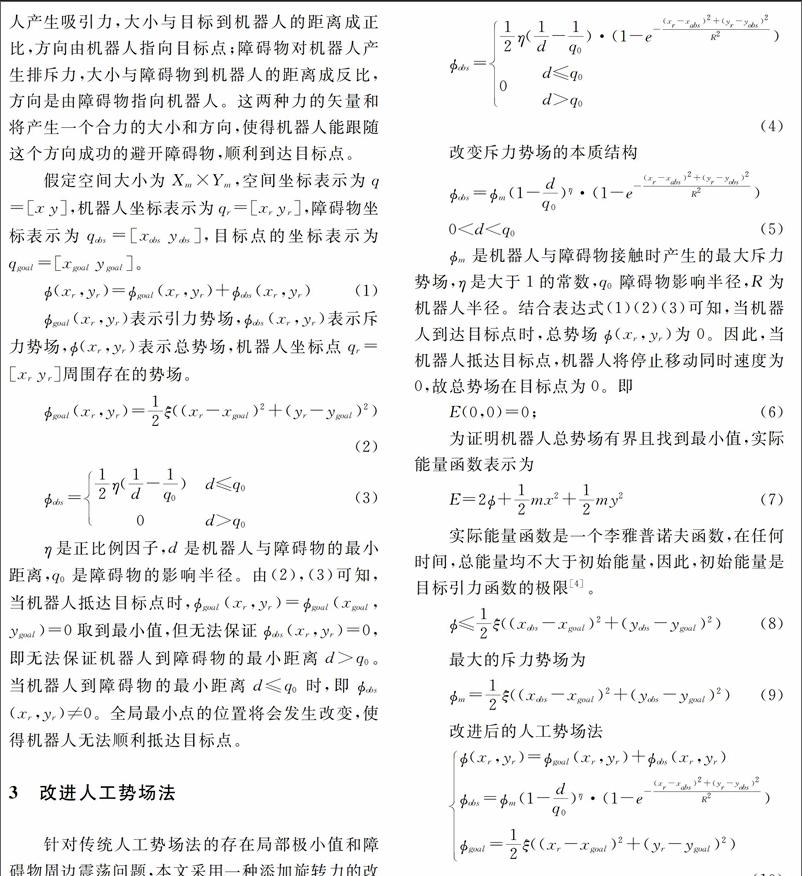
由图3、图4可知,采用BFPSO优化改进人工势场法的移动机器人导航仿真,能顺利通过凹型及不同形状的障碍物区域,成功抵达目标点。仿真得到一条只有轻微震荡的导航路径。
5总结全文
本文介紹了一种添加旋转力的改进人工势场法,该方法能优化移动机器人导航路径,减轻导航过程中的出现的不良震荡。文中移动机器人采用两个PID控制器完成机器人移动速度和转角的控制。论文采用BFPSO算法对移动机器人两个PID控制器参数及势场函数两个增益系数进行离线优化,运用优化参数完成改进人工势场法移动机器人的导航。仿真结果表明,采用BFPSO算法离线优化改进人工势场法的移动机器人导航,对移动机器人的导航具有一定的优化效果,能减轻导航路径在障碍物前的震荡,顺利通过凹型及不同形状的障碍物区域,成功抵达目标点。
参考文献
[1]姚靖靖,邱于兵,敖俊宇.移动机器人避障路径规划改进人工势场法[J].科学技术与工程,2011,11(13): 2953-2956
[2]肖本贤,余雷,李善寿,等. 逃逸人工势场法局部极小值策略的研究[J].系统仿真学报,2007,19(19):4495-4498.
[3]温素芳,郭光耀. 基于改进人工势场法的移动机器人路径规划[J].计算机工程与设计, 2015,36(10):2818-2822.
[4]SFEIR J,SAAD M,SALIAHHASSANE H. An improved Artificial Potential Field approach to realtime mobile robot path planning in an unknown environment[C]. Robotic and Sensors Environments (ROSE), 2011 IEEE International Symposium on. IEEE, 2011:208-213.
[5]AHMED A A,ABDALLA T Y,ABED A A.Path Planning of Mobile Robot by using Modified Optimized Potential Field Method[J].International Journal of Computer Applications ,2015,13(4):0975-8887
[6]LI Q,WANG L,CHEN B,et al.An improved artificial potential field method for solving local minimum problem[C].Intelligent Control and Information Processing(ICICIP), 2011 2nd International Conference on. IEEE, 2011:420-424.
[7]沈文君. 基于改进人工势场法的机器人路径规划算法研究[D].广州:暨南大学,2009.
[8]KORANI W M,DORRAH H T,EMARA H M. Bacterial foraging oriented by particle swarm optimization strategy for PID tuning[C].GECCO Conference Companion. 2008:445-450.
[9]田亚菲,张范勇,阎石. 基于粒子群优化的细菌觅食优化算法[J].控制工程,2012,19(6): 1671-7848.
[10]YOGENDRA K S,RAJESH B.BFPSO optimized PID Controller design using ISE, IAE, IATE and MSE error criteria[J].International Journal of Advanced Research in Computer Engineering & Technology (IJARCET), 2013, 2(7):2334-2336.
第36卷第1期2017年3月计算技术与自动化Computing Technology and AutomationVol36,No1Mar. 2 0 1 7第36卷第1期2017年3月计算技术与自动化Computing Technology and AutomationVol36,No1Mar. 2 0 1 7
