三轴车辆全轮转向模型预测控制研究
2017-05-08袁磊王超史辉刘西侠
袁磊王超史辉刘西侠
(1.北京特种车辆研究所,北京 100072;2.装甲兵工程学院,北京 100072)
三轴车辆全轮转向模型预测控制研究
袁磊1王超1史辉1刘西侠2
(1.北京特种车辆研究所,北京 100072;2.装甲兵工程学院,北京 100072)
针对由于控制参数和外界环境不确定而导致的线性全轮转向控制器控制精度不高的问题,研究了对模型精度要求低、能处理多约束问题和鲁棒性较好的全轮转向模型预测控制算法。构建车辆数学模型、UA轮胎模型,设计全轮转向模型预测控制器,并选取典型工况,对比分析了基于模型预测控制的全轮转向车辆、线性控制全轮转向车辆和原双前桥转向车辆的响应特性。结果表明:模型预测控制算法对车轮刚度摄动和外界侧风干扰具有较好的鲁棒性,车辆控制效果较好。
1 引言
当前,多轴轮式车辆发动机功率和传动系传动比能够较好地满足车辆高速行驶要求,但其常遇到湿滑路面转向和紧急避障转向工况,这些工况下车辆极易出现转向发飘、侧滑、侧翻和失去转向能力的情况,这成为制约车辆行驶车速进一步提高的关键因素[1~2]。两轴车辆的研究经验表明:全轮转向技术可有效提高车辆的高速操纵稳定性[3~4]。
常见的多轴车辆全轮转向多采用零质心侧偏角比例控制,其控制器采用线性方程进行设计,其控制效果主要依赖于模型的精确度,即当整车质量、地面附着系数发生变化时控制算法的鲁棒性较差[3~6]。另外,线性控制模型仅在车轮侧向力学特性处于线性范围时较为有效,但大多数情况下其特性是非线性的[7~8]。
为解决控制参数精度不高,控制对象结构参数和使用环境不确定以及控制变量和状态变量存在实际约束的问题,很多学者加强了对滑模控制、鲁棒控制和自适应控制的研究,但这些控制算法都只能部分改善控制器的鲁棒性,对控制器未建模参数和外界扰动的适应能力依然较差,且都未能完整地将系统约束考虑在内[7~8]。而模型预测控制具有对控制模型精度要求低、算法鲁棒性较好和能处理多约束问题等特点,在车辆发动机控制、牵引力控制和自主驾驶控制等方面得到了较多研究[9~11]。因此,本文研究模型预测控制算法在多轴全轮转向车辆上的应用,以期提高控制器鲁棒性。
2 三轴车辆动力学建模
2.1 车辆动力学模型
如图1所示,建立车辆3自由度侧向动力学模型,图中,O点为车辆静止时,质心垂线与侧倾轴的交点,以其为原点,得到固结于簧载质量和非簧载质量的坐标系X′-Y′-Z′和X-Y-Z,ϕ为车身侧倾角,e0为簧载质量质心到X轴的距离,wz为车辆横摆角速度,lj(j=1,2,3)为车辆质心到第j轴的距离,L1为车辆转向中心到第1轴的距离,vx_i、vy_i为各车轮纵向和侧向速度,δi为各车轮转角,αi为各车轮侧偏角,其中i=fl,fr,ml,mr,rl,rr,分别表示左前、右前、左中、右中、左后、右后车轮。

图1 车辆模型
侧向运动:

横摆运动:

簧上质量侧倾运动:

车轮载荷变化为:

车轮侧偏角为:

t时刻车辆质心坐标为:

式中,m为车辆总质量;ms为车辆簧载质量;vx为纵向车速;vy为侧向车速;wx为车身侧倾角速度;Ix和Iz分别为车身绕X轴和Z轴的转动惯量;Ixz为车身绕X轴和Z轴的惯性积;Kϕ为等效车身侧倾角刚度;Cϕ为等效车身侧倾阻尼系数;b为左、右车轮距离的1/2;Fy_i、Fd_i分别为各车轮侧向力和载荷(i=fl,fr,ml,mr,rl,rr,分别表示左前、右前、左中、右中、左后、右后车轮);θ为车辆质心偏航角;β为车辆质心侧偏角;X(t)、Y(t)分别为t时刻整体坐标系中车辆质心的X、Y坐标;X0、Y0分别为车辆质心初始位置的X、Y坐标。
2.2 车轮模型
车轮采用UA轮胎模型[11]。轮胎侧偏刚度为220 kN/rad,纵向滑移刚度为220 kN/m。取车速为10 m/s,可得不同载荷和地面附着系数下轮胎侧向力和侧偏角与纵向力、滑移率的关系,如图2所示。
由图2a可知:当轮胎侧偏角处于±5°范围内时,其与侧向力的关系基本呈线性;当轮胎侧偏角超出该范围时,随侧偏角的增加,侧向力逐渐趋于饱和,且轮胎侧向力随其载荷的增大而增加。由图2b可知:轮胎侧向力随地面附着系数的增大而增加。


图2 轮胎侧向力学特性曲线
3 模型预测控制器设计
3.1 预测控制模型
选取车辆线性2自由度模型作为控制模型,设Cαi为各车轮侧偏刚度,则:

3.2 预测输出函数
式(9)可离散化为:

设预测时域为Np、控制时域为Nu且Np≥Nu,定义预测输出序列和控制增量序列为:

则对未来Np步的输出预测方程为:

3.3 目标优化求解
全轮转向车辆高速行驶时,其控制目标通常为零质心侧偏角。基于预测模型和预测输出函数,可将基于零质心侧偏的控制量求解问题转化为二次规划问题。优化问题可等效为在满足约束条件下的优化目标最小:

式中,Γy为输出加权因子;Γu为控制加权因子;第1项表示每一时刻期望输出的质心侧偏角最小;第2项表示控制输出转角变化,以防止控制量过快饱和。
式(14)的优化问题可进一步转换为:


车轮转角约束设置为:

车轮转角增量约束设置为:

质心侧偏角约束设置为:

车轮侧偏角约束设置为:

4 控制器有效性验证
为验证控制器有效性,选取μ=0.8、vx=80 km/h,设置前轮转角幅值为5°、频率为45°/s的正弦输入,对比分析双前桥转向(DFWS)、线性零质心侧偏角控制全轮转向(Alg3)和模型预测控制全轮转向(DMC)3种控制方法的控制效果和车轮转角情况,如图3所示。
DMC控制的车辆质心侧偏角相比Alg3控制的车辆质心侧偏角更接近于零,车辆状态和车轮转角响应更快,且横摆角速度较稳定,而双前桥转向车辆的状态参数出现了较严重变化。因此,DMC控制通过对车轮转角的优化调整,能够使车辆质心侧偏角始终基本保持为零,车辆状态和车轮转角响应速度快,验证了控制器的有效性。

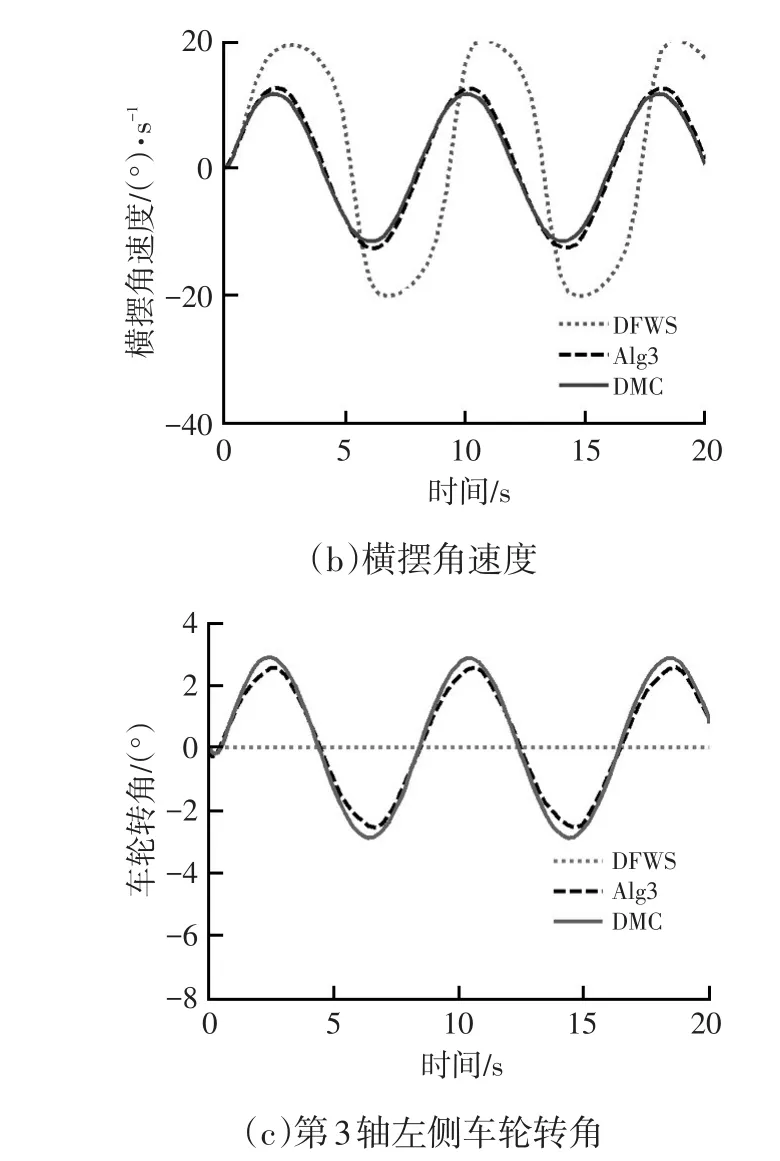
图3 前轮角正弦输入响应
5 控制器鲁棒性分析
对于固定参数的线性控制器,车轮侧偏刚度下降和侧向风干扰都会导致控制效果变差。预测控制器通过实时反馈的车辆状态参数,实现对车轮转角的滚动优化控制,对不确定系统具有较强的鲁棒性[12~14]。分别在不同工况下进行角阶跃和角脉冲输入仿真,以分析和验证控制器对车轮刚度摄动和外界侧风干扰的鲁棒性。
5.1 车轮刚度摄动分析
研究车辆各轴两侧车轮侧偏刚度下降对控制器鲁棒性的影响。仿真工况1:μ=0.8,vx=80 km/h,各车轮侧偏刚度同时下降15%;仿真工况2:μ=0.5,vx=80 km/h,各车轮侧偏刚度同时下降15%。设置前轮角阶跃为3°,起跃时间为1 s,对比分析DFWS、Alg3和DMC 3种控制方法在工况1、工况2下的控制效果,如图4、图5所示。


图4 工况1仿真结果

图5 工况2仿真结果
由图4a和5a可知:相比Alg3控制车辆和DFWS车辆,DMC控制车辆的质心侧偏角基本保持为零,受车轮刚度下降的影响较小,鲁棒性较好。由图4b和5b可知:车轮刚度下降时,DFWS车辆横摆角速度逐渐增大,说明由于侧向力不足,车辆出现了甩尾;Alg3控制的全轮转向车辆横摆角速度保持不变,说明全轮转向车辆能够提供足够的侧向力;DMC控制的全轮转向车辆横摆角速度出现了下降,说明控制器为保持零质心侧偏角而实时调整了车轮转角。
5.2 外界侧风干扰分析
[15]设置风谱A和B,如图6所示。风谱A取风速为10 m/s,作用于车辆右侧,若风压中心位于质心后部,侧向风将会产生负的横摆力矩;风谱B为车辆左侧一短促侧向风,风速为15 m/s,若风压中心位于质心前部,则产生负的横摆力矩。仿真工况3:μ=0.6,vx=80 km/h,lx=-0.2,风谱A。仿真工况4:μ=0.6,vx=80 km/h,lx=0.2,风谱B。

图6 等效侧向风谱类型
设置前轮转角阶跃为3°,起跃时间为1 s,对比分析DFWS、Alg3和DMC 3种控制方法在工况3、工况4下的控制效果,如图7、图8所示。

图7 工况3仿真结果
由图7可知:当受到风谱A干扰后,DFWS车辆质心侧偏角出现了较为严重的负值,横摆角速度先增加而后减小,车辆出现了较为严重的侧滑和甩尾;Alg3控制的全轮转向车辆的质心侧偏角增加,横摆角速度基本保持不变,说明全轮转向车辆能够提供足够的侧向力,但对质心侧偏角的控制鲁棒性较差;DMC控制的全轮转向车辆的质心侧偏角基本保持为零,横摆角速度由于车轮转角的实时调整而出现增加。
由图8可知:当受到风谱B干扰后,DFWS车辆质心侧偏角同样出现了较为严重的负值,横摆角速度同样先增加而后稍微减小,车辆出现了较为严重的侧滑和甩尾;Alg3控制的全轮转向车辆的质心侧偏角都出现了短暂变化,尔后恢复为零,说明车辆能提供足够的侧向力,但对质心侧偏角的控制鲁棒性较差;DMC控制车辆的质心侧偏角基本保持为零,横摆角速度由于车轮转角的实时调整而出现短暂变化。

图8 工况4仿真结果
6 结束语
建立了包含车轮侧向、横摆、侧倾自由度和车轮载荷转移的三轴车辆动力学模型。通过控制模型选取、预测输出函数和优化目标求解设计了全轮转向模型预测控制器。对比分析了预测控制器对车轮刚度摄动和侧向风干扰的鲁棒性,结果表明:全轮转向模型预测控制器通过对车轮转角的实时优化调整,能够使车辆在不同附着路面工况下,始终保持零质心侧偏角,验证了控制算法对车轮刚度摄动和外界干扰的良好鲁棒性。
参考文献
1 Huh K,Kim J,Hong J.Handling and Driving Characteris⁃tics for Six-Wheeled Vehicles.Proceedings of the Institu⁃ tion of Mechanical Engineers Part D Journal of Automobile Engineering,2000,214(2):159~170.
2 An S J,Lee H Y,Cho W K,et al.Development of steering algorithm for 6WS military vehicle and verification by experiment using a scale-down vehicle.Advanced Vehicle Control,2006,5(2):245~250.
3 杜峰.基于线控技术的四轮主动转向汽车控制策略仿真研究:[学位论文].西安:长安大学,2008.
4 陈建松,陈南,殷国栋,等.考虑非线性特征的4WS车辆滑模鲁棒稳定性控制.东南大学学报:自然科学版,2010,40(5):969~972.
5 李炎亮,高秀华,张春秋,等.车载式自行火炮多桥动态转向系统.吉林大学学报:工学版,2006,36(3):321~326.
6 刘芹芹,高秀华,张小江.多轴转向车辆二自由度鲁棒控制.农业工程学报,2011,27(2):136~140.
7 闫永宝,张豫南,颜南明,等.六轮独立驱动滑动转向车辆运动控制算法仿真研究.兵工学报,2013,34(11):1461~1468.
8 王树风,李华师.三轴车辆全轮转向最优控制.汽车工程,2013,35(8):667~672.
9 刘金琨.滑模变结构控制MATALAB仿真.北京:清华大学出版社,2012.
10 Yin G G,Chen N,Li P.Improving Handling Stability Performance of Four-Wheel Steering Vehicle viaμsynthesis Robust Control.IEEE Transactions on Vehicular Technology,2007,56(2):2432~2439.
11 张向文,王飞跃,高彦臣.车轮稳态模型的分析综述.汽车技术,2012(2):1~7;2012(3):1~7+57;2012(4):1~6;2012(5):1~4;2012(6):1~7+15.
12 席裕庚.模型预测控制.第2版.北京:国防工业出版社,2014.
13 李少远.全局工况系统预测控制及其应用.北京:科学出版社,2008.
14 卢晓辉.汽车传动系统的滚动优化控制研究:[学位论文].长春:吉林大学,2013.
15 Abe M.车辆操纵动力学.喻凡译.北京:机械工业出版社,2012.
(责任编辑 斛 畔)
修改稿收到日期为2017年2月6日。
The Study of Model Predictive Control for All-Wheel Steering Three-Axle Vehicle
Yuan Lei1,Wang Chao1,Shi Hui1,Liu Xixia2
(1.Beijing Special Vehicle Research Institute,Beijing 100072;2.Armored Forces Engineering Institute,Beijing 100072)
Uncertainty of control parameters and external environment caused low accuracy of linear all wheel steering controller,to solve this problem,we studied the model predictive control algorithm which has low precision requirement for control model and the ability to handle multiple constraints and high robust.A model predictive controller was designed with vehicle mathematic model and the UA tire model constructed,typical load conditions were selected to compare thedynamic characteristics among the modelpredictive control-based all wheel steering vehicle,linear control all wheel steering vehicle and the original double front axle steering vehicle.The results indicated that the model predictive control algorithm has good robustness for wheel stiffness perturbation and wind disturbance and thevehiclehas good control performance.
Three-axle vehicle,All-wheel steering,Model predictive control,Tire stiffness perturbation,Crosswind disturbance
三轴车辆 全轮转向 模型预测控制 轮胎刚度摄动 侧风干扰
U461.6
A
1000-3703(2017)03-0047-06
