一种用于口腔和牙科治疗的机器人系统设计
2017-05-03冯杭王丽邢乐君贾婷婷陈犹白赵蕊张海钟
冯杭,王丽,邢乐君,贾婷婷,陈犹白,赵蕊,张海钟
中国人民解放军总医院(301医院)a.口腔颌面外科;b.护理部,北京100853
一种用于口腔和牙科治疗的机器人系统设计
冯杭a,王丽a,邢乐君a,贾婷婷a,陈犹白a,赵蕊b,张海钟a
中国人民解放军总医院(301医院)a.口腔颌面外科;b.护理部,北京100853
目的设计一种新型医疗机器人系统,用于口腔和牙科治疗。方法本文设计了一种口腔和牙科治疗的集成化系统,该系统包括控制台、机器人、座椅装置、导航装置等,医生通过控制台操控机器臂在患者口内进行多种口腔及牙科治疗。结果与传统治疗方法相比,这种机器人系统可以为医生提供更好的操作视野,避免医患交叉感染,实现口腔和牙科的精准治疗,同时也降低了患者呛水、坠针的风险,缓解患者的紧张情绪。结论从设计和样机试制情况来看,这种用于口腔及牙科治疗的机器人系统潜力较大,其将有助于提高我国医疗机器人水平,造福广大患者。
机器人;牙科治疗;精准治疗;力学反馈;控制台
引言
在当前的口腔及牙科治疗中,医生主要采用手动治疗方法,需要近距离的观察和操作。这就使医生长时间保持低头弯腰的体位,久之易产生疲劳,进而诱发颈椎病等多种职业病。同时在治疗过程中患者口腔内有各种体液飞溅,近距离的观察存在医患交叉感染的风险,亦很难看清牙齿的每个侧面,难以精准治疗[1-5]。而且在口腔治疗椅上患者一般保持仰卧位,在牙科治疗中患者口内往往需要喷水冷却,常出现呛咳现象。医生手持针和锉在患者口腔内操作时,若有不慎或造成针坠入患者口内,甚至坠入气管,危及生命。目前相关领域有提出使用新型牙科手机来代替手动操作,但上述器械的应用范围较窄,难以实现模块化精细操控[6-11]。为解决上述问题,中国人民解放军总医院和多所研究机构联合设计了这种用于口腔和牙科治疗的机器人系统,作为口腔和牙科治疗的集成化装置,这种机器人系统能够完成多种类型的口腔和牙科治疗,目前已获得一项国家发明专利(申请公布号CN105395295A)和一项实用新型专利(专利号2015209461893,授权公告号CN205126477U),随着技术设计和工艺设计的完善,现已进入样机试制阶段。
1 材料与方法
1.1 系统整体设计
这种用于口腔和牙科治疗的机器人系统,见图1。该机器人系统主要包括控制台、机器人、座椅装置和导航装置。它能根据口腔医生编制的操作计划,依据实际情况确定操作程序,再把操作程序转发为可操作性机械运动。医生坐在控制台前,不与病人直接接触,通过三维视觉系统,在导航系统协助下控制机械手臂来完成多种口腔和牙科治疗。
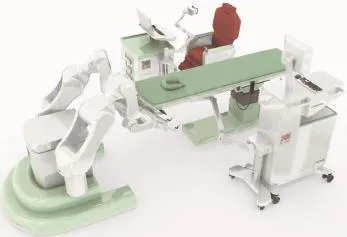
图1 机器人系统设计图
1.2 机器人模块
机器人模块包括主控制器、机械手臂等。其中主控制器是机器人的动力和操控转化中心,用来处理数据并控制机械手臂的运动。而机械手臂由机械臂,机械手,治疗器械等构成,机械手与机械臂能进行伸缩、倾斜、以及±180°的旋转,通过装配不同类型的治疗器械,可完成多种口腔和牙科治疗。
机器人模块的设计特点:① 不同的治疗器械能通过相同的锁紧突起,固定在机械手的顶部,包括激光头、超声洁牙头、钻针、扩大针、抛光头、填充材料注射头或填压头等;② 机械手上安装了光源、喷水器,保证治疗视野的清晰明亮;③ 机械手上装有两个以上摄像头,来实现医生视野的立体成像,并能将患者的口腔和牙齿图像放大1~10倍;④ 机械手设置了弹性挡片,其安装在机械手具有治疗器械一边的外周边缘上,防止治疗过程中损伤患者口腔软组织;⑤ 机械手上还有压力传感器,检测治疗过程中治疗器械在牙齿处操作中遇到的阻力,并将检测结果发送至控制台。
1.3 控制台
控制台包括显示装置、操作装置和急停装置等。显示装置接收来自机械手的摄像头和力学传感器信号并通过各类屏幕显示。其中医生使用的屏幕为两个数字化目镜组成的立体视窗,可同时显示实时口内图像和压力波形等系统数据,亦有患者用屏幕及教学用屏幕等。操作装置由脚踏器和一对操作手柄构成:机械手上的压力传感器将压力信号传递到控制台上的操作手柄,使操控的医生能感觉到治疗器械在牙齿治疗中受到的力,控制台上的手柄每移动10 mm,在机械手上的钻头只移动1 mm,从而使牙齿的治疗更加精确,手柄顶端还设有变焦键,用来切换不同倍数下的视野。急停装置,在医生和患者手边均设有急停按钮,可在患者感觉不适时按下,亦可在系统检测到故障后自动发动,使治疗器械如钻头停止转动并缓慢撤出机器手。
1.4 座椅装置
座椅装置分为坐式和俯卧式两种,患者可根据体验自行选择。其中坐式装置能够使患者面朝前方与下方之间的角度保持固定;俯卧式则由患者直接俯卧在治疗床上,床体上有面部露出窗口使得患者面部从其露出。这两种装置均可防止患者在牙科治疗过程中对被治疗器械喷水所呛到,亦可减低坠针的风险。患者头部前方均安装有显示屏,患者可选择影音作品,也可选择观看自己口腔内牙齿治疗的实时图像,缓解牙科治疗的恐惧心理。
1.5 导航装置
导航装置包括主体部和导航跟踪器,其中主体部固定在机器人设备上,导航跟踪器则与治疗器械一起则放置于患者口内。导航装置根据术前采集的患者牙齿数据,在治疗过程中对患者的牙齿进行精确定位,并显示治疗器械进入牙齿及牙根管里的深度和方向。医生可根据导航装置的牙齿数据设定治疗机械手的移动范围,当治疗机械手超出设定的移动范围时,治疗机械手即停止移动,保证治疗的精准和安全。
2 结果
目前国内外尚未报道有同类用于口腔及牙科治疗的机器人系统,而与传统口腔综合治疗椅相比,这种机器人系统有以下核心技术:① 独特的座椅装置不仅可以降低患者呛水、坠针的风险,缓解患者的紧张情绪,还设有急停开关键,能让患者在感觉不适时迅速安全地暂停治疗,凸显人性化;② 医生可以保持一个舒适的体位坐在远离患者的控制台前操作,甚至在其他城市通过网络操作机器人,这样既保护了医生,又促进了远程医疗的发展;③ 机械手上的摄像装置和力学传感器,不仅使医生清楚地看到患者口内的立体影像,还能把握治疗中的力度和范围,实现口腔和牙科的精准治疗;④ 机器人手臂上可快速替换多种治疗器械,如用于去龋、备洞、牙冠预备的高速钻头;用于根管治疗的各类针、锉;用于口腔洁治的超声洁牙机头;甚至换上激光扫描仪,对已备好的牙进行扫描,在CAD/ CAM设备上快速制作义齿。
目前该型机器人系统已进入样机试制阶段,初步组装的机械臂调试的关键在于应力反馈系统,即机械手上各种力学传感器与操作手柄相结合的相关力学调试。
3 讨论与结论
我国医疗机器人起步整体较晚,国内医疗机构配置的机器人较少,有条件接触微创医疗机器人的医生人数有限,广大患者对医疗机器人还很陌生,医疗机器人的应用与国际水平尚存在较大差距[12-20]。而目前国内外用于口腔及牙科治疗的机器人尚存在空白,因此,设计制造这种用于口腔及牙科治疗的机器人系统潜力极大,其将有助于提高我国医疗机器人水平,造福广大患者。
[1] Van der Meer WJ,Vissink A,Ren Y.Full 3-dimensional digital workflow for multicomponent dental appliances:A proof of concept[J].J Am Dent Assoc,2016,147(4):288-291.
[2] Lang T,Staufer S,Jennes B,et a1.Clinical validation of robot simulation of toothbrushing-comparative plaque removal eff i cacy[J].BMC Oral Health,2014,7(4):74-82.
[3] 赵一姣,王勇.口腔医学与数字化制造技术[J].中国实用口腔科杂志,2012,5(5):257-261.
[4] 李许演,苏宇雄.经口腔机器人手术在头颈外科中的应用[J].中国口腔颌面外科杂志,2011,9(1):75-78.
[5] Vicini C,Dallan I,Canzi P,et a1.Transoral robotic tongue base resection in obstructive sleep apnoea-hypopnoea syndrome: a preliminary report[J].ORL J Otorhinolaryngol Relat Spec,2010,72(1):22-27.
[6] Zhang YD,Jiang JG,Liang T,et al.Kinematics modeling and experimentation of the multi-manipulator tooth -arrangement robot for full denture manufacturing [J].J Med Syst,2011, 35(6):1421-1429.
[7] Kenngott HG,Fischer L,Nickel F,et a1.Status of robotic assis tance-a less traumaticand more accurate minimally invasive surgery[J]. Langenbeeks Arch Surg,2012,397(3):333-341.
[8] Razavi M,Talebi HA,Zareinejad M.A GPU-implemented physics-based haptic simulator of tooth drilling[J].Int J Med Robot,2015,11(4):476-485.
[9] 戚仕涛,刘铁兵.外科手术机器人系统及其临床应用[J].中国医疗设备,2011,26(6):56-59.
[10] 侯小丽,马明所.医疗机器人的研究与进展[J].中国医疗器械信息,2013,21(1):48-50.
[11] 倪自强,王田苗,刘达.医疗机器人技术发展综述[J].机械工程学报,2015,51(13):45-52.
[12] Jiang JG,Zhang YD,Jin ML,et al.Bending process analysis and structure design of orthodontic archwire bending robot[J].Int J Smart Home,2013,7(5):345-352.
[13] 郭志阳,陈学英.STM32的医疗康复机器人手臂控制系统[J].单片机与嵌入式系统应用,2015,15(12):66-69.
[14] 吕毅,董鼎辉.医疗机器人在消化外科的应用[J].中华消化外科杂志,2013,12(5):398-400.
[15] 金振宇.中国达芬奇手术机器人临床应用[J].中国医疗器械杂志,2014,38(1):47-49.
[16] Nelson CA,Hossain SG,Al-Okaily A,et al.A novel vending machine for supplying root canal tools during surgery[J].J Med Eng Technol,2012,36(2):102-116.
[17] Sun X,McKenzie FD,Bawab S,et al.Automated dental implantation using image-guided robotics:registration results[J]. Int J Comput Assist Radiol Surg,2011,6(5):627-634.
[18] Jeelani S,Dany A,Anand,et a1.Robotics and medicine:A scientific rainbow in hospital[J].J Pharm Bioallied Sci,2015, 7(2):381-383.
[19] 王伟,王伟东,闫志远,等.腹腔镜外科手术机器人发展概况综述[J].中国医疗设备,2014,29(8):5-10.
[20] 周梦琪,张金宁,洪瑾.机器人在口腔医学领域的应用[J].上海口腔医学,2016,25(5):626-629.
本文编辑 袁隽玲
Design of a Robot System for Oral and Dental Treatment
FENG Hanga, WANG Lia, XING Le-juna, JIA Ting-tinga, CHEN You-baia, ZHAO Ruib, ZHANG Hai-zhonga
a.Department of Oral and Maxillofacial Surgery; b.Department of Nursing, the Chinese PLA General Hospital (301 Hospital), Beijing 100853, China
ObjectiveThe present research aimed to design a new medical robot system for oral and dental treatment.MethodsIn this paper, an integrated system for oral and dental treatment was designed. The system includes a console, a robot, a seat, a navigation device, and so on. The doctor manipulates the manipulator through the console to perform various oral and dental treatments in the patient’s mouth.ResultsCompared with traditional methods of treatment, this robot system can provide physicians with a better operating vision and avoid cross-infection between doctors and patients, so as to achieve precise treatment of oral and dental. It also reduces the risk of patient’s choking water, falling needle, and eases the tension of patients.ConclusionFrom the design and prototype situation, this robot system for oral and dental treatment has great potential, which will help improve the level of China’s medical robots, and provides great benef i ts for the majority of patients.
robot; dental treatment; precise treatment; mechanical feedback; console
R780.1;TP24
A
10.3969/j.issn.1674-1633.2017.04.009
1674-1633(2017)04-0030-03
2016-08-01
2016-08-16
国家自然科学基金面上项目(31271004);解放军总医院转化医学基金(01023930)。
张海钟,教授,主任医师,博士生导师,主要研究方向为口腔及牙科治疗的智能微创化技术。
通讯作者邮箱:zhanghz126301@126.com
