在轨服务卫星GNC系统地面测试与在轨支持设计
2017-05-03饶卫东
饶卫东,刘 蕊,肖 帅
(北京控制工程研究所,北京 100190)
在轨服务卫星GNC系统地面测试与在轨支持设计
饶卫东,刘 蕊,肖 帅
(北京控制工程研究所,北京 100190)
针对在轨服务卫星GNC系统的任务特性,设计了一套地面测试系统,经过相应模块扩展即可用于在轨服务技术支持.该系统已应用于某型号GNC系统的地面测试和在轨运行,稳定性和可靠性良好.地面测试系统由动力学仿真器、星上产品模拟器、ATS测试系统、三维显示系统组成,该系统充分验证了星上软件算法逻辑和硬件电气接口.增加三维避障、图像显示分析等模块后,测试系统实时性更强,可视化程度更高,能适应卫星在轨服务等复杂工况.
在轨服务卫星;GNC测试系统;在轨支持;三维避障
0 引 言
在轨服务型卫星的主要任务和功能包括以下几个方面:在轨目标监测,在轨辅助变轨,在轨燃料补给,在轨故障修复和在轨有限装配等[1],在轨服务卫星能降低卫星任务失败的风险,减少任务费用,增强任务系统功能及提高任务的灵活性等,在经济、国防和促进空间技术发展方面有重要意义.
世界各航天大国都有不少在轨服务卫星,2002年开始的“地球静止轨道清理机器人”(ROGER)计划[2]旨在研究捕获GEO非合作目标卫星并辅助其离轨等技术.服务卫星经地面引导和自主导航至距离目标15 m处,然后服务卫星释放网状或绳系抓捕系统捕获目标,随后服务卫星将其拖入“坟墓”轨道,与目标分离后返回GEO等待下一次任务.2003年1月,XSS-10成功完成了在轨试验[2],验证了微小卫星自主交会、目标监视的软硬件技术.“试验卫星系统”XSS-11小卫星对图像处理技术和自主交会技术进行了改进.XSS-11于2005年4月入轨后,与火箭上面级在0.5~1.5 km的距离先后3次成功交会,验证了非合作目标的自主交会技术.2007年完成的“轨道快车”(Orbital Express)计划[3],其验证的关键技术包括自主交会与逼近、自主捕获连接、燃料双向传输、在轨电池和计算机模块更换.Orbital Express计划由目标卫星“下一代卫星”(NEXTSat)和服务卫星“自主空间传送机器人轨道器”(ASTRO)组成.该计划成功完成了在轨飞行试验,由于其具备在轨捕获、模块更换和在轨加注等多项功能,因而受到了高度关注,成为在轨服务技术发展史上的里程碑事件.
在轨服务是空间技术进入新时代的标志[4],其中制导、导航与控制(GNC)系统作为卫星核心分系统,其任务复杂程度远远超过常规卫星,这也给卫星的测试系统提出了更高的要求.本文以机械臂在轨操作服务型卫星作为测试对象,给出了一种在轨服务型卫星GNC测试系统组成方案.
1 测试系统介绍
1.1 测试系统组成
(1)动力学实时仿真器
包括卫星动力学仿真和机械臂运动学仿真,前者模拟太空中卫星姿态和轨道动力学,接收执行机构(动量轮和喷气)输出的控制电信号,驱动动力学微分方程实时求解动力学姿态、轨道状态量,网络打包输出给姿态敏感器(模拟器).后者模拟机械臂关节正逆运动学,接收关节姿态命令,实时输出关节运动信息以及手眼相机位姿信息.
(2)星上产品模拟器
包括姿态敏感器模拟器和执行机构模拟器,其中姿态敏感器从网络接收动力学姿态和轨道信息,转化并输出相应电信号.执行机构模拟器接收星载计算机控制力和力矩电信号,驱动执行机构动力学微分方程,求解出执行机构状态量,通过网络发送给动力学仿真器.
(3)ATS自动化测试系统
自动化测试系统包括,图形化显示客户端,数据存储服务器,总线监视器和主控电脑等.所有测试数据都在图形化显示客户端中显示,客户端可将不同遥测数据以数字或者曲线形式在窗口中显示;数据存储服务器可以对测试过程产生的测试数据进行实时保存,并由数据库提供数据服务,可以进行数据处理和开发;1553总线和CAN总线通讯状态可以在总线监视器中显示;主控电脑主要实现指令上行功能,发送各种类型遥控指令.
(4)三维显示系统
三维显示系统包括三维碰撞预示电脑和三维实时显示电脑两部分.其中,三维实时显示电脑在轨测试期间利用遥测数据驱动三维模型,实时还原太空中卫星的三维场景并在终端电脑中显示;三维碰撞预示电脑在遥控上行通道中,利用历史遥测数据和当前遥控指令驱动,显示三维模型接下来的运动轨迹,可以检测运动碰撞并终止不恰当遥控指令.
1.2 测试实时性
动力学实时仿真系统和星上模拟器系统测试机箱采用CPCI-6965 2.2GHZ双核处理器,嵌入式多任务操作系统VxWorks6.6.测试系统实现了快速实时测试要求,精确保证每一控制周期完成既定控制任务.
1.3 兼容性和扩展性
为了兼容多种测试工况,测试机柜上设计了信号适配器.信号适配器开发了2类以上接口,实现了模拟器和真实产品之间的兼容.扩展性方面ATS自动化测试系统采用组播网络实现各个测试设备互联互通,复杂工况时能容易地接入其他终端设备.比如,引入或者移除三维显示电脑和图像显示电脑等就能实现地面测试和在轨测试两者无缝过渡.
2 测试系统原理
2.1 地面测试系统原理
地面测试时需要测试设备配合星上产品进行测试,主要是卫星动力学模拟器、机械臂运动学模拟器和ATS自动化测试软件等.地面测试分为全数字仿真测试和半物理仿真测试,全数字仿真采用模拟器替代所有卫星产品,可验证卫星姿、轨控算法和机械臂正、逆运动学算法.半物理仿真[6-7]采用真实星载计算机和部分卫星产品,只有卫星动力学和机械臂运动学采用软件模拟.半物理仿真不仅可以测试星上软件的算法逻辑,还能验证星上产品间的电接口性能,两者都是卫星GNC系统地面测试的重要手段.
半物理仿真测试期间,地面测试软件模拟在轨机械臂运动学,采集下一拍机械臂指令,计算各个关节角度和角速度,输出目标在手眼相机中的位置和姿态.操控机构线路得到目标位姿误差,调用路径规划和避障算法,计算得到下一拍机械臂各关节运动指令.
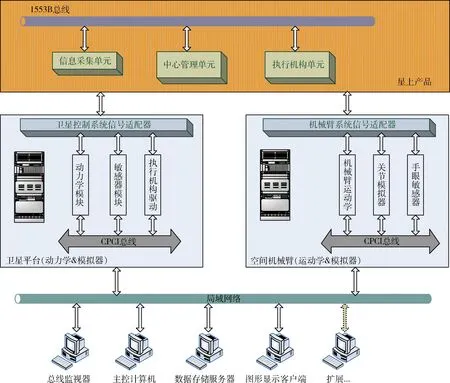
图1 卫星GNC分系统测试硬件布局Fig.1 Hardware lay out GNC test system

图2 卫星地面测试系统原理图Fig.2 Principle of ground test system
2.2 在轨支持系统原理
在轨支持系统主要包括:ATS自动化测试软件、机械臂运动模拟系统、三维实时显示软件、三维碰撞检测系统和实时图像显示分析系统等.其中三维显示软件和三维碰撞检测系统是专为机械臂在轨操作提供支持,实时图像显示分析软件可以为卫星在轨加注、维修和成像等任务提供在轨支持.在轨支持系统突出遥测实时性和在轨图像的连续性,其中三维显示计算机能预示空间机械臂的运动轨迹,帮助测试人员检测碰撞与干涉.
在轨支持系统除正常下传卫星和机械臂的常规遥测参数外,还会接收在轨图像.当机械臂各关节需要运动时,在末端固定安装的手眼相机会连续对空间拍照,图像数据通过数传系统实时下传.利用这些实时图像,测试人员能清楚地看到机械臂周围的相对空间关系.当需要完成在轨加注任务时,在卫星上安装的相机对目标卫星成像,测试人员通过图像辨认本星与目标星之间的相对距离和相对姿态,确定卫星下一步的控制策略.
卫星机械臂运动时有触碰其他星上产品的风险,并且机械臂关节数较多(往往超过6个关节),各个关节之间在运动时也会存在互相干涉.仅仅依靠机械臂手眼相机拍摄的图像区域,远远覆盖不了潜在危险区域.
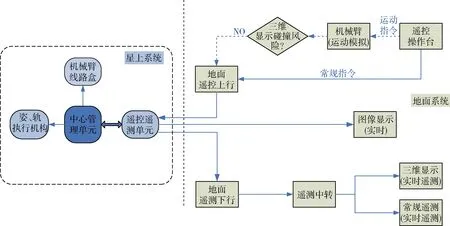
图3 卫星在轨支持系统原理图Fig.3 Principle of on-orbit support system
三维显示软件提取卫星舱外的三维模型,利用该模型在STK中建立三维实体对象,在轨测试期间利用遥测数据驱动该三维对象,实时还原太空中卫星的三维场景,在终端电脑中实时显示.一般而言,卫星在轨运行时需要同时运行2个三维显示软件,其中1个运行在遥控上行通道中,用于运动碰撞检测;另一个运行在遥测下行通道中,用于测试人员实时查看星上部件相对运动关系.
三维显示系统中输出碰撞报警提示,如果机械臂各个关节接触到卫星其他部位或者关节之间互相产生干涉,报警标志会被触发并且软件显示碰撞部位相关信息.正因为如此,上行的机械臂运动指令需作延迟处理,在延迟时间内由地面运动模拟器提前执行待发的运动指令序列,由三维碰撞检测系统判定运动指令是否有效、机械臂运动是否有关节碰撞风险.
3 测试系统性能验证
测试系统在完成地面GNC系统测试后,参加了卫星在轨支持任务.这里选取卫星某次任务惯性指向机动的试验数据做对比分析,这次任务中滚动角、俯仰角和偏航角分别机动20°、20°和80°,机械臂关节1、3和5分别转动2°、23°和90°.图4给出整星三轴姿态曲线,图5给出机械臂关节姿态曲线.从图5中可以看出,在轨飞行和地面测试机械臂关节角曲线基本一致,在轨飞行时关节角有轻微抖动.
4 结 论
针对在轨服务型卫星GNC系统遥测和图像实时性要求高、操作危险性高的特点,提出了在轨服务型卫星GNC测试系统.介绍了测试系统的组成和工作原理图,阐述了三维避障系统如何为空间机械臂运动规避风险,最后对在轨飞行与地面测试姿态曲线进行比较,结果表明该测试系统表现良好,可普遍用于在轨服务型卫星GNC系统测试和在轨支持.
Ground Testing and On-Orbit Technical Support Design forGNC System in On-Orbit Service Satellites
RAO Weidong, LIU Rui, XIAO Shuai
(BeijingInstituteofControlEngineering,Beijing100190,China)
A testing system is proposed towards new conditions for both ground and on-orbit test. The system has been implied in a satellite and has done a good job in test. Ground testing system consists of dynamical simulator of satellite & robots, onboard module simulators, ATS and 3D display system. The system can verify logic in on-board computer and behavior of electric interface. On-orbit testing system is supplemented by the three-dimensional obstacle avoidance system and the image analysis system, which works in real time with high visualization.
on orbit service satellites; GNC testing system; on orbit technical support; obstacle avoidance system
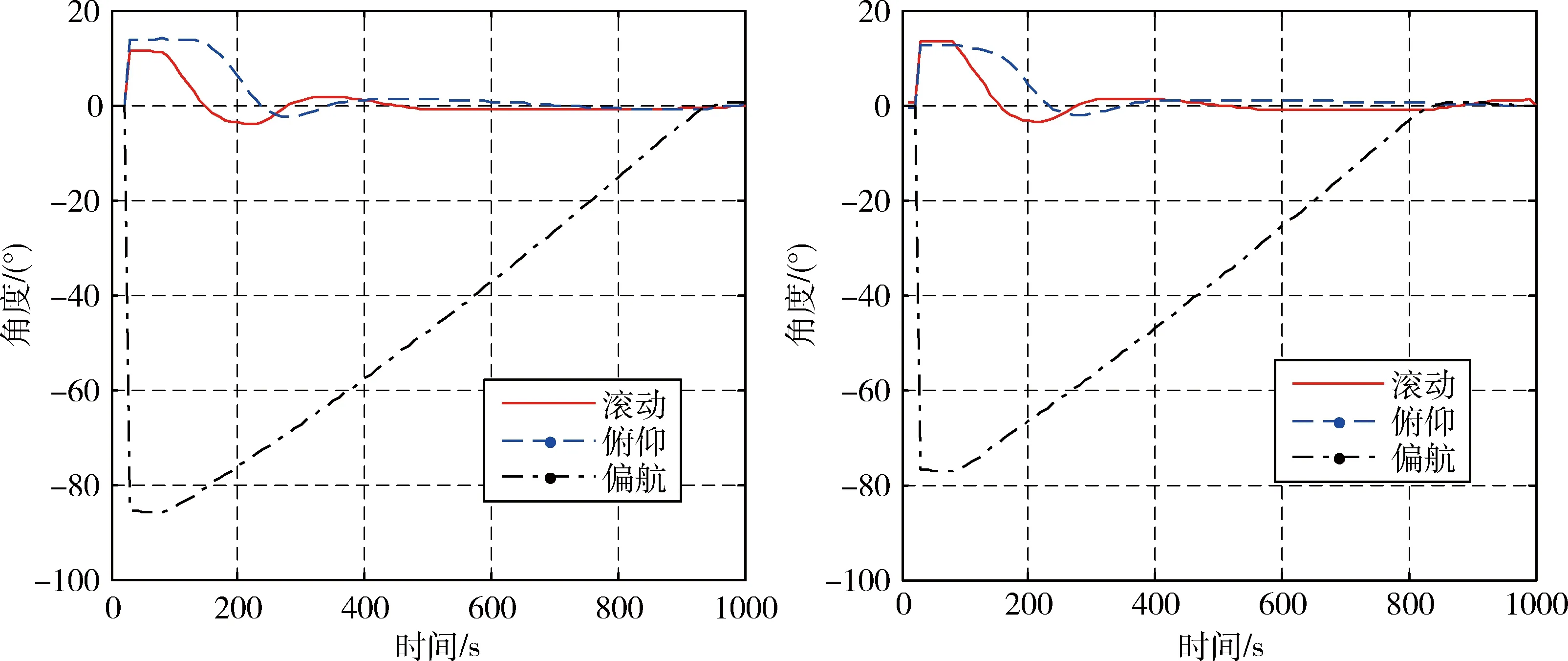
图4 卫星三轴姿态曲线(左:在轨曲线,右:测试曲线)Fig.4 3-Axis Attitude of the satellite (left: on-orbit, right: simulation)

图5 机械臂关节角曲线(左:在轨曲线,右:测试曲线)Fig.5 Angles of manipulator ribs (left: on-orbit, right: simulation)
[1] KASSEBOM M, KOEBEL D, TOBEHN C, et al. Roger-an advanced solution for a geostationary service satellite[C]//The 54thInternational Astronautiacal Congress of the International Astronautical Federation.2003.
[2] THOMAS M D, DAVID M. XSS-10 Micro-Satellite Flight Demonstration Program Results[J]. Proceeding of SPIE, 2004: 16-25.
[3] PINSON R , HOWARD R,HEATON A. Orbital express advanced video guidance sensor: ground testing, flight results and comparisons[C]//AIAA Guidance, Navigation and Control Conference and Exhibit. Washington D.C.:AIAA, 2008.
[4] 何英姿,魏春玲,汤亮. 空间操作控制技术研究现状及发展趋势[J]. 空间控制技术与应用, 2014,40(1): 1-8. HE Y Z, WEI C L, TANG L. A survey on space operations control[J]. Aerospace Control and Application, 2014, 40(1): 1-8.
[5] 陈士明,周志成,曲广吉,等. 国外静止轨道在轨服务卫星系统技术发展概况[J]. 国际太空,2014(4):55-63. CHEN S M, ZHOU Z Z, QU G J. Systematic technology skeleton of abroad geostationary on-orbit service satellites[J]. International Space, 2014(4):55-63.
[6] 董恺琛,赵开春,赵鹏飞,等. 微纳卫星姿控软件实时测试系统[J]. 光学精密工程, 2013, 21(8): 2008-2015. DONG K C, ZHAO K C, ZHAO P F, et al. Real-time testing system for attitude control software of micro-nano satellite [J]. Optics and Precision Engineering, 2013, 21(8):2008-2015.
[7] 李豪杰,江小华,程翔,等. 飞机座椅弹射试验用测试系统设计[J]. 弹道学报,2003,15(2):73-76. LI H J, JIANG X H, CHEN X, et al. Testing system design for the fighter seat ejection examination[J]. Journal of Ballistics, 2003,15(2):73-76.
V44
A
1674-1579(2017)02-0067-06
10.3969/j.issn.1674-1579.2017.02.011
2016-09-23
饶卫东(1985—),男,工程师,研究方向为卫星姿态与轨道控制;刘 蕊(1979—),女,高级工程师,研究方向为卫星姿态与轨道控制;肖 帅(1986—),男,工程师,研究方向为空间机械臂控制.
