一种基于模糊连接度的区域生长毁伤特征提取算法*
2017-05-03曹继平朱亚红吴聪伟
曹继平,朱亚红,吴聪伟
(火箭军工程大学,西安710025)
一种基于模糊连接度的区域生长毁伤特征提取算法*
曹继平,朱亚红,吴聪伟
(火箭军工程大学,西安710025)
针对传统的区域生长算法在提取军事目标毁伤时,不能较好地处理毁伤区域与背景之间的模糊性,生长结果对种子点的选取敏感等问题,提出了一种基于模糊连接度的区域生长算法。算法以模糊连接度作为生长点与种子点相似度的度量,有效地保持了像素之间的模糊性,按照模糊连接度由强至弱的顺序生长,使得生长的结果对种子点的选取不敏感;采用灰度波动控制和USAN面积相结合的方式作为生长准则,在适应目标区域灰度变化的同时得到了较好的边缘定位效果。实验结果证明了算法的有效性。
模糊连接度,区域生长,特征提取
0 引言
区域生长算法是一种重要的图像分割算法,它将具有某种相似性质的像素集合起来构成区域,具有人机交互性强、分割精度高等特点。然而,实际军事目标上的毁伤类型多样,具有面积变化范围较大、形状复杂和边界模糊等特点,这给采用传统的区域生长算法提取毁伤带来了困难。因此,本文针对传统的区域生长算法在提取军事目标毁伤时,不能较好地处理毁伤区域与背景之间的模糊性、生长结果对种子点的选取敏感等问题,提出了一种基于模糊连接度(Fuzzy Connectedness)的区域生长算法。
1 区域生长算法研究现状
区域生长算法的基本原理:首先在感兴趣的区域中找一个种子像素作为生长的起点,然后将种子像素周围邻域中与种子像素有相同或相似性质的像素合并到种子像素所在的区域中,不断地重复上述过程,直到没有满足条件的像素可以包括进去时为止。目前这方面的研究主要集中在设计特征衡量标准、生长准则以及提高算法的有效性和精确性方面。文献[1-2]分别提出了不同的区域生长算法。文献[2]针对整幅图像的分割问题,提出了对称性区域生长(Symmetric Region Growing)的概念,定义了一组理论准则,指出在对称生长函数的指导下,区域生长结果对于初始种子点的选取不敏感。文献[1]针对单结构目标的提取问题,提出了一种基于模型的自适应区域生长算法,其同质性准则定义为生长点灰度值与属于一个给定均值和标准差的高斯分布的相似程度。为了保证在区域生长的过程中,同质性准则的不变性,该算法采用了两次区域生长的方法,在第1次生长过程中对同质性参数进行学习,在第2次生长的过程中提取区域。虽然文献[1-2]算法得到的区域生长结果对于种子点的选取位置不敏感,但是算法对于目标与背景之间,或者目标与目标之间像素灰度存在模糊的情况不能很好地分割。针对目标与背景之间的模糊分割问题,文献[3]提出一种改进的模糊连接度分割算法。算法对于模糊目标的分割具有较好的效果,但该算法只对图像中存在两类目标——前景目标和背景的情况进行分割。当目标的背景复杂时,算法难以得到准确的分割结果。
为了准确提取出单时相遥感图像中的毁伤区域,本文提出一种基于模糊连接度的区域生长算法。
2 基于模糊连接度的区域生长算法
2.1 基于模糊连接度的相似性准则
在实际成像过程中,由于受到时间、空间以及成像设备的影响,获取的数字图像是模糊的;同时在实际图像中,由于邻近物体的相似性,在一些邻近的相似物体之间没有清晰的界限。因此,在度量图像中像素之间的相似关系时,需要保留其模糊性。Udupa等人依据此思想[4-6],在1996年提出n维数字空间模糊目标的理论。依据此理论,可以得到基于模糊度连接的相似性准则:
设R为图像上待生长的感兴趣的区域,a为其内部的一个种子点,b为图像上的任意一点,如图1所示。如果区域R包含点b,那么必然存在路径Pab从种子点a到图像点b。由模糊连接度的概念可知,的值是唯一的,且为所有路径中最强路径连接度的值。由模糊连关系K的对称性可知,如果将b设置为区域的种子点,同样必然存在路径Pba从种子点b到图像点a,路径的模糊连接度大小即以模糊连接度作为衡量生长点和种子点之间的相似性程度的测度,以其大小作为控制生长的测度,生长的过程具有对称性,由b作为生长点同样能够生长出点a。同理可知,该生长的过程也具有自反性和传递性。由于点a与点b的选取具有任意性,因此,采用模糊连接度作为衡量生长点和种子点之间相似性的测度,控制生长点按照与种子点之间模糊连接度由强至弱的顺序生长,区域生长的结果对于种子点的选取不敏感。

图1 基于模糊连接度的生长示意图
2.2 基于灰度波动控制与USAN面积相结合的生长准则
区域生长算法是一种自种子点开始由内而外不断扩展的分割方法。相似性测度选取后,最关键的是确定区域的生长准则,即新的生长点在满足什么条件下进行生长,在什么条件下停止。实际的毁伤区域具有灰度波动范围较大、边界模糊的特点,为了准确提取出区域中的毁伤,区域生长准则应该满足如下条件[7-8]:①对目标的灰度分布情况具有一定的适应性;②具有一定的边缘定位能力,算法在目标的边缘点位置处停止生长。
为此,本文提出一种基于灰度波动控制与USAN(Univalue Segment Assimilating Nucleus,USAN)面积相结合的方式作为生长规则。
2.2.1 基于灰度波动控制的准则
本文采用一种基于灰度波动控制的生长准则来控制灰度的生长,其基本原理是:依据以生长区域的灰度波动情况来控制当前待生长点的灰度生长阈值,当已生长区域的灰度波动较大时,通过一定的控制,抑制当前生长向灰度波动范围较大的范围生长;当已生长区域的灰度波动较小时,通过一定的控制,鼓励当前生长向灰度波动范围较大的范围生长。通过灰度波动控制保证区域灰度的波动达到一个动态的平衡,避免由于固定的阈值控制策略而导致分割结果产生过分割或欠分割的情况。
设包含种子点o的已生长区域Ro的均值和标准方差分别为u和σ,n为已生长区域Ro的像元个数,已生长区域灰度均值和标准方差为:
在已生长区域Ro、均值和标准方差基础上,计算基于已生长区域特征得到的灰度约束阈值:

式中,σ/m反映了方差相对于灰度均值的波动性。1-σ/m根据已生长区域灰度波动向反方向调节灰度波动。Tα为允许的波动调节项,反映生长条件苛刻程度,用于控制区域生长的过程。当Tα的值较小时,支持较高的同质性区域;当Tα的值较大时,允许生长区域具有较大灰度波动。Tg是计算得到的阈值。
式(3)的意义为:当已生长区域灰度波动性大时,先让灰度波动小的待生长点生长,抑制波动大的待生长点生长;当已生长区域灰度波动性小时,先让灰度波动大的待生长点生长,鼓励灰度波动大的待生长点生长。这样使得区域生长过程中灰度的波动得到控制,达到一个平衡状态。
在区域生长过程中,假设e为当前点,如果当前点的灰度值满足下式,则进行生长,否则停止生长。

其中,f(e)为当前点e的灰度,u为式(2)计算得到的已生长区域灰度均值,Tg为式(3)计算得到的阈值。
2.2.2 基于USAN面积的准则
SUSAN(Small Univalue Segment Assimilating Nucleus,SUSAN)算子由英国牛津大学学者Smith[9-11]和Brady于1997年提出,是一种基于灰度的特征点获取方法,适用于图像中边缘和角点的检测,具有简单、有效、抗噪声能力强和计算速度快的特点。其原理为,用一种近似圆形的模板在图像上移动,模板内部每个图像像素点的灰度值都和模板中心像素的灰度值作比较,若模板内某个像素的灰度与模板中心像素(核)灰度的差值小于一定值,则认为该点与核具有相同(或相近)的灰度,由满足这一条件的像素组成的区域称为吸收核同值区USAN。
算法实现步骤:
Step2将所有点c∈Co满足条件的点,压入堆栈;
Step3判断堆栈Q是否为空,当Q为空时转到Step9;当Q不为空时,对Q按照点的值进行排序(使与种子点最相似的点,先生长),进入Step4;
Step4从堆栈Q中移出一个空间元素c,计算其邻域的点e(‖e-c‖≤1)与该点的模糊连接度μκ(c,e);
Step7如果满足f(e)-u<Tg和Uarea(e)>Tusan将该点压栈Q;否则判断Uarea(e)是否为局部极小值;
Step8如果Uarea(e)不是局部最小值,将e点压栈,否则转入Step3;
Step9输出区域生长结果Iputput。
在具体的生长过程中,可以通过调节阈值Tα和Tusan达到不同的生长目的。例如,当要提高生长区域的灰度一致性,同时提高对边缘的定位能力,可以通过降低Tα和提高Tusan来达到。
3 实验结果及分析
为了验证本文算法的有效性,分别采用本文算法和文献[1]算法对文献[1]中的脑切片图像中的脑白质区域进行提取。
图2显示了两种方法的FOM图,其中横坐标对应图2中不同初始种子点选取位置,纵坐标对应原始目标区域CG和区域生长区域Cr的匹配程度,结果值越高表明算法提取的结果越接近原始目标区域,其最大值为1。蓝色实线和红色虚线分别为本文算法和文献[1]算法提取结果与真值图像匹配程度曲线。

图2 本文算法与[1]算法的FOM图
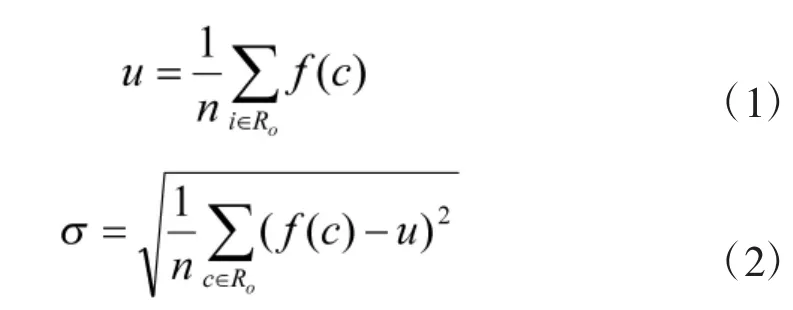
从图2可以看出,本文算法的曲线远在文献[1]算法的上部,且分布平坦,说明了本文算法得到的提取结果精度较高,对种子点的选取位置不敏感;而文献[1]算法的曲线波动较大,说明文献[1]算法提取结果精度较差,对种子点的选取位置敏感。表1分别给出了两种算法,在不同种子点位置进行区域生长时所用的时间。
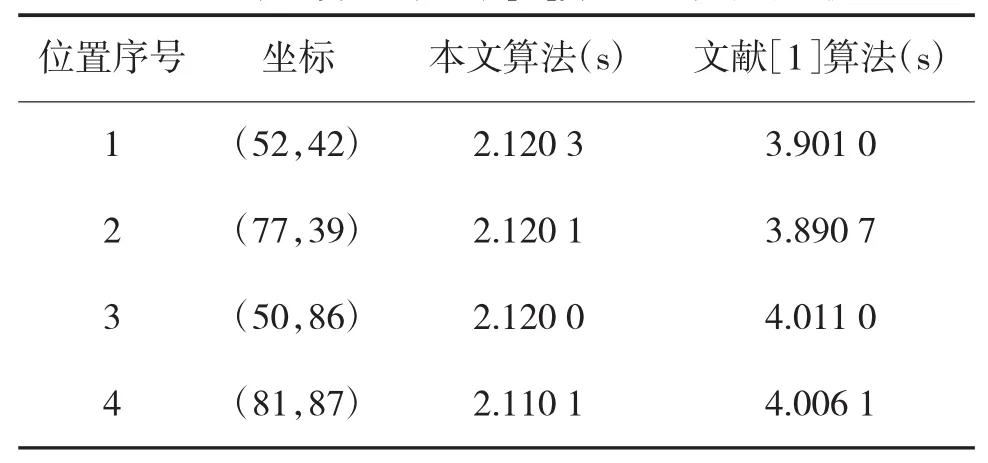
表1 本文算法与文献[1]算法运行时间比较
从表1中可以看出,本文算法在时间效率上优于文献[1]的算法,时间约为后者的1/2,产生这种情况的原因是由于文献[1]的算法需要进行两次区域生长,第1次用来估计模型的参数,第2次进行区域生长,而本文算法只需要运行一次,相比较大大减少了计算量。
图3分别给出了采用本文算法对图3(a)中的典型军事目标毁伤的提取结果。其中3(a)为提取的原始毁伤图像,图中红“×”位置为毁伤提取实验设定的种子点,图3(b)为毁伤提取结果,图3(c)为提取的毁伤区域轮廓在原始毁伤图像上的叠加效果。
图3 本文算法对图简单结构毁伤提取结果
通过观察可以看出,本文算法能够较好地完成单时相图像中毁伤提取任务,边缘定位性较好。
4 结论
本文对采用区域生长算法提取图像中的毁伤进行了研究。首先,针对军事目标毁伤具有形状复杂、边界模糊和内部灰度波动范围较大的特点,提出了一种基于模糊连接度的区域生长算法。算法以模糊连接度作为生长点与种子点相似程度的度量,控制生长点按照与种子点之间模糊连接度由强至弱的顺序生长,在较好保留像素间模糊性的同时,降低了生长结果对种子点选取的敏感性;采用灰度波动控制和USAN面积相结合的方式作为生长判断条件,在适应目标区域灰度变化的同时得到了较好的边缘定位效果。实验结果证明,本文提出的基于模糊连接度的区域生长算法对种子点的选取不敏感,具有较好的边缘定位能力,在对毁伤的提取上具有较好的人机交互性。
[1]POHLE R,TOENNIES K D.A new approach for model-based adaptive region growing in medical image analysis[C]//In:Proceedings of the 9th International Conference on Computer Analysis and Patterns Warsaw,2001.
[2]SHU Y W,HIGGINS W E.Symmetric region growing[J]. IEEE Transactions on Image Processing,2003,12(9): 1007-1015.
[3]JAYARAM K,SAMARASEKERA U S.Fuzzy connectedness and object definition:theory,algorithms,and applications in image segmentation[J].Graphical Models and Image Processing,1996,58(3):246-261.
[4]JAYARAM K.Fuzzy connectedness and image segmentation[J].Proceedings of the IEEE,2003,91(10):1649-1669.
[5]SMITH S M,BRADY J M.SUSAN-a new approach to low level image processing[J].International Journal of Computer Vision,1997,23(1):45-78.
[6]ROBERS L G.Machine perception of three-dimension solids[C]//Optical and Electro-Optimal Information Processing Cambridge:MIT Press,1965.
[7]朱朝杰,董广军,王仁礼.基于特征提取的目标变化检测方法研究[J].海洋测绘,2007,27(2):50-52.
[8]蔡红苹,蒋咏梅,粟毅.一种基于区域生长原理的油库目标聚类定位方法[J].遥感学报,2006,10(3):415-419.
[9]李桂芹,尹东,薛晨荣.基于区域生长的道路和桥梁识别方法的研究[J].计算机工程与应用,2007,43(6): 216-218.
[10]李旭辉,慈林林,刘建华,等.基于遥感图像的毁伤提取技术研究[J].自动化指挥与计算机,2008(3):51-55.
[11]YAN D M,ZHAO Z M.Road detection from quickbird fused image using IHS transform and morphology[C]// IEEE International Geoscience and Remote Sensing Symposium,2003.
A Characteristic Distill Arithmetic of Region Growing Method Based on Fuzzy Connectedness
CAO Ji-ping,ZHU Ya-hong,WU Cong-wei
(Rocket Force University of Engineering,Xi’an 710025,China)
To solve the problem that the traditional region growing algorithm can not deal well with the fuzziness between the damage area and the background,and the segmentation result is sensititive to the initial seed pixel,a region growing method based on fuzzy connectedness is proposed.The method takes fuzzy connectedness as the similarity measure between the initial pixel and the growing pixel,which keeps the fuzziness among the pixels well.A growing crition integrated gray-fluctuation control with USAN area is proposed to fit the gray fluctuation in the damage area and get edge position precisely.The experiment results show the validation of this method.
fuzzy connectedness,region growing method,characteristic distill
TP317
A
1002-0640(2017)04-0075-04
2016-02-24
2016-04-18
军队预研基金资助项目
曹继平(1974-),男,陕西眉县人,博士,副教授。研究方向:装备管理与保障。