基于SINS辅助的PLL带宽选择方法
2017-05-02汤霞清陈书磊高军强孙泽鹏
汤霞清, 陈书磊, 武 萌, 高军强, 孙泽鹏
(陆军装甲兵学院兵器与控制系, 北京 100072)
捷联惯导系统(Strapdown Inertial Navigation System, SINS)可以进行自主导航,但误差随着导航时间的增加而累积,定位精度会大幅下降。全球导航卫星系统(Global Navigation Satellite System, GNSS)可以实时更新位置且长时间定位,但在高动态和弱信号的战场环境下,其极易受到干扰,造成信号失锁。因此,把SINS和GNSS的优点结合起来,用SINS来辅助GNSS跟踪卫星信号,以提高信号跟踪的鲁棒性,是目前导航研究的热点[1]。
GNSS接收机的卫星信号跟踪性能与环路带宽的选择密切相关:在较小的环路带宽下误差较小,但动态性能不足;较大的环路带宽虽然可提高接收机的动态性能,适应高动态的环境,但会引入更多的噪声,使卫星信号不易分辨,造成失锁[2]。因此,需选择最优带宽并设计带宽的门限,使跟踪环路满足高动态、低载噪比的环境[3]。GNSS的导航数据实时存储于载波和伪随机码进行了二次调制后的无线电中,用户要想得到精确的导航数据,接收机可以采用载波锁相环(Phase Lock Loop, PLL)和码环(Delay locked Loop, DLL)跟踪数据[4]。而PLL更容易受到动态应力等误差的影响,因此改进PLL环路结构更能提高跟踪性能。
笔者采用SINS辅助PLL的环路结构,提出了一种简单直观的调节环路带宽的方法,使跟踪环路带宽可以根据信号的载噪比和载体动态实时进行调整,以稳定跟踪信号。
1 传统的载波跟踪环路分析
1.1 传统PLL结构
传统PLL由鉴相器、环路滤波器和压控振荡器组成,其基本模型如图1所示,其中:θ1(s)为输入量;θe(s)为误差量;Kd为鉴相器增益;ud(s)为鉴相器输出量;F(s)为环路滤波器函数;uf(s)为环路滤波器输出量;K0为压控振荡器增益;θ0(s)为输出量。

图1 传统PLL基本模型
PLL开始工作后,将输入信号和压控振荡器输出信号的频率差作为调控值,当调控值为0,即输入信号频率等于压控振荡器输出信号频率时,信号进入锁定状态。
从图1可以得到误差传递函数
(1)
1.2 传统PLL误差分析
通过拉普拉斯终值定理,可以求得PLL稳态误差
(2)
可以看出:稳态误差与输入信号的类型、环路的阶数有关,在低动态情况下,PLL应为2阶环路,在高动态情况下,PLL应为3阶环路,以保证稳态误差可以保持收敛。不论高、低动态,DLL设计为PLL辅助的二阶环路。
PLL误差主要包括热噪声误差、振荡器自然抖动引起的相位误差和载体相对于卫星的动态应力误差[5],接收机的跟踪性能与PLL的误差密切相关,超过一定的界限,信号就会失锁,经验式如下[6]:

(3)
式中:δPLL为PLL总误差;θe为动态应力误差;δPLLt为热噪声误差;δv为振动器自然抖动引起的相位误差;θA为阿伦方差引起的相位误差;15°、0.008 m为经验门限。
动态应力误差即环路稳态误差,2、3阶环路稳态误差分别为
(4)
式中:d2R/dt2、d3R/dt3分别为载体与卫星最大视距方向上的加速度、加加速度动态;Bn为环路噪声带宽。
分析式(4)可知:增大环路噪声带宽可减小动态应力误差。
热噪声误差
(5)
式中:λ为载波的波长;c/n0为载噪比;T为预检测积分时间。
分析式(5)可知:通过减小环路噪声带宽可以减小热噪声误差,同时满足低载噪比的需要,但过小的环路噪声带宽易造成环路信号失锁。
由于振荡器自然抖动引起的相位误差δv在1.42°左右,远小于跟踪门限,且阿伦方差引起的相位误差θA很小,因此这2个误差可以忽略不计。
2 SINS辅助的载波跟踪环路分析
2.1 SINS辅助的PLL环路结构
图2为SINS辅助的PLL基本模型[7]。其中:k/(s+k)为SINS滤波器函数,k为滤波器参数;若环路为二阶环时,F(s)=(sτ2+1)/(sτ1),τ1、τ2为滤波器参数;e(s)为SINS估计的多普勒误差和钟频误差;w(s)为外部相位偏差。
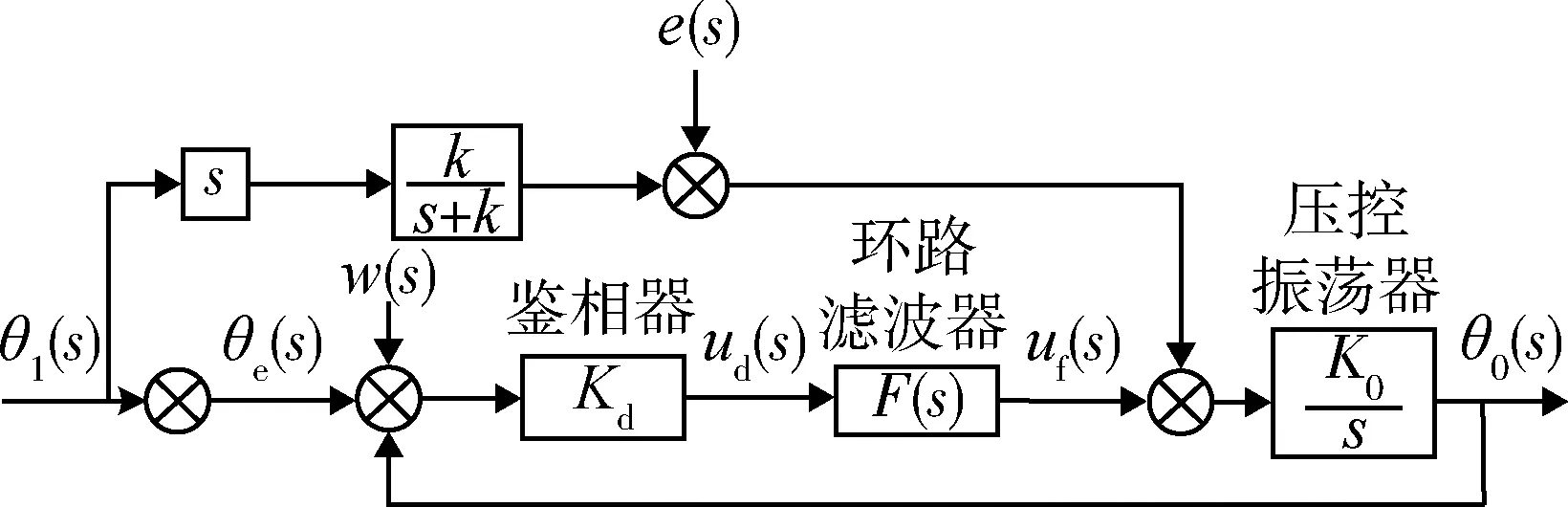
图2 SINS辅助的PLL基本模型
为了便于分析,假设Kd=K0=1,若不考虑w(s)和e(s),则输入到输出的传递函数
(6)
误差传递函数
(7)
2.2 SINS辅助的PLL环路误差分析
当载体动态较低,相对于卫星做加速度运动时,稳态误差
(8)
同理,做加加速度运动时,稳态误差
(9)
若k→∞,则跟踪误差均为0,跟踪环路对载体动态的变化不再敏感,载体动态可以由SINS完全进行跟踪,因此无需将跟踪环路的带宽设计得非常大,以适应高动态的变化,缩小带宽即可减小相位误差,从而提高环路的精度和稳定性。
由于载体可以通过SINS对其动态进行跟踪,PLL的动态应力误差基本被抵消,最主要的误差为热噪声误差和SINS估计的多普勒误差和钟频误差,因此SINS的精度会显著影响环路带宽。
3 跟踪环路带宽门限设计方法
由以上分析可知:如果忽略振荡器自然抖动引起的相位误差和阿伦方差引起的相位误差,则PLL总误差与载噪比、环路噪声带宽、预检测积分时间和载体与卫星最大视距方向上的动态有关,可表示为
δPLL=δPLLt+θe/3=
(10)
式中:n=2时,α=0.53;n=3时,α=0.784 5。
对式(10)中Bn求偏导数,令∂δPLL/∂Bn=0,可得总误差最小时的环路带宽,即最优带宽
(11)
式中:C/N0=10lg(c/n0)。
由式(11)可以求出跟踪环路的最优带宽,当最优带宽、载体最大动态和SINS辅助后的动态应力误差已知,则此时最大的问题是环路噪声带宽的最小门限是多少,即在多少的带宽范围内环路可以稳定跟踪信号。为了解决这一问题,笔者设计了一种简单直观的最小宽带门限求解方法,其流程如图3所示。

图3 最小带宽门限求解流程
当载体最大动态已知,假设此时跟踪环路误差全部由动态应力引起,则可以通过动态应力误差和环路噪声带宽的关系求出初始带宽,然后求解PLL总误差,判断总误差是否超过门限,如果未超过门限,则令初始带宽减去0.5,再计算总误差,通过反复迭代,直到总误差大于门限为止,此时的带宽Bn+0.5即为最终带宽;反之,如果总误差超过门限,则令初始带宽加上0.5,通过反复迭代,直到总误差小于门限为止,此时的带宽Bn即为最终带宽。通过此方法求出的Bn最终值即为跟踪环路工作的最小带宽门限,以最小带宽门限到最优带宽的带宽范围作为环路的工作范围,然后通过自适应地调整带宽范围,使跟踪误差始终保持在较低的水平。
近几年,娃哈哈年营收连续下滑。产品老化和营销渠道老化的双重冲击,让娃哈哈陷入了前所未有的困境。在此背景下,娃哈哈不断求新求变,想重获消费者的青睐,但这并非易事。娃哈哈不断高频次推出新品,但大多反响平平,甚至很快就销声匿迹。
4 仿真分析
4.1 有效跟踪范围分析
当接收机无SINS辅助时,由式(11)可知:当T=1 ms,λ=0.190 3 m时,根据载体动态和载噪比的情况可以求解最优带宽。在最优带宽下,其跟踪环路的总误差应最小,因此可以根据总误差的限定公式求出无SINS辅助情况下2、3阶PLL环路对信号的有效跟踪范围,分别如图4、5所示。其中:红色区域表示在当前的载体动态和载噪比情况下,环路可以保持稳定的跟踪。
分析图4、5可得:在2阶PLL环路下,当载体最大动态为10g时,在信号的载噪比低于34 dB·Hz的情况下,环路已不能稳定跟踪信号,极易出现失锁的情况;3阶PLL环路即使在28 dB·Hz的弱信号情况下,仍能对动态为10g/s的信号进行稳定跟踪,说明3阶PLL环路比2阶PLL环路更能保持在高动态下的稳定性。因此低动态信号多采用2阶PLL环路,高动态信号多采用3阶PLL环路,下面只分析有效跟踪范围内的跟踪带宽。
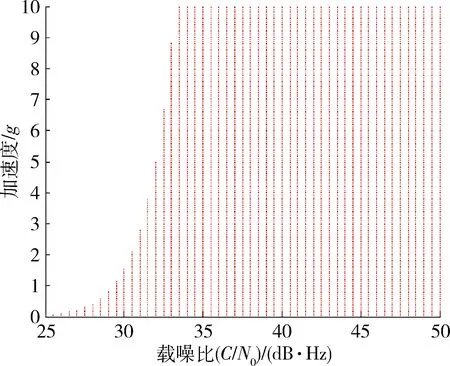
图4 无SINS辅助的2阶PLL环路有效跟踪范围
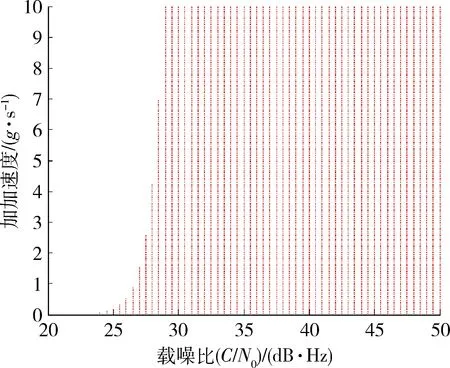
图5 无SINS辅助的3阶PLL环路有效跟踪范围
4.2 最优跟踪环路带宽门限分析
由以上分析可知:最大视距下的载体动态对信号跟踪性能影响极大,3阶PLL环路较符合高动态和弱信号的具体环境。因此,笔者仅对3阶PLL跟踪环路进行分析。
通过对载体动态和载噪比的实时计算,得到3阶PLL环路的最优带宽上、下限仿真结果,分别如图6、7所示。可以看出:载噪比是影响跟踪带宽范围的主要因素,载噪比为30 dB·Hz时最优带宽选择为22Hz,可选择的带宽范围极小,且极易出现失锁的情况;在相同的载噪比下,随着载体动态的增加,必须增加带宽才能保持稳定跟踪,且带宽范围缩小了。由此可知:在所设计的带宽门限内选取跟踪带宽,有利于保持较低的总误差和稳定跟踪信号,但在弱信号和高动态的情况下,带宽门限可选取的范围极小,难以满足跟踪需求,因此必须采用SINS辅助的跟踪结构。

图6 3阶PLL环路最优带宽上限仿真结果

图7 3阶PLL环路最优带宽下限仿真结果
4.3 SINS辅助的带宽门限分析
当载体最大动态为10g/s时,PLL跟踪环路采用3阶环,笔者通过对比在有无SINS辅助时不同载噪比情况下的PLL环路最优带宽和最小带宽门限,验证跟踪环路带宽门限设计方法的有效性。图8、9分别为无辅助、SINS辅助的PLL环路最优带宽和最小带宽门限。
由图8可知:无辅助时,在30 dB·Hz的信号强度下,PLL环路可对信号进行稳定跟踪,最优带宽为25.3 Hz,最小带宽门限为17.1 Hz,当带宽设计在此范围内,其跟踪误差较小,能稳定跟踪信号,且随着信号增强,其带宽可选范围也将扩大;在25 dB·Hz的信号强度下,由于PLL总误差较大,环路已不能稳定跟踪信号,因此需采用SINS辅助的PLL环路结构来进一步提升接收机高动态时对弱信号的稳定跟踪能力。

图8 无辅助的PLL环路最优带宽和最小带宽门限

图9 SINS辅助的PLL环路最优带宽和最小带宽门限
可以大幅提升高动态下对弱信号的稳定跟踪能力,且可将带宽设计得很小,提高对外界噪声的抑制能力。
5 结论
笔者采用SINS辅助的PLL环路结构,按照误差最小原则设计了环路最优带宽的计算方法。为了能使接收机在不同动态和信号强度下实时调节带宽,进一步优化了最小带宽门限的选取方法,使接收机能够在一定范围内调节带宽,稳定跟踪信号。
通过仿真分析可知:所提出的带宽门限选择方法可以明确带宽的选取,使PLL总误差始终低于跟踪误差门限;SINS的辅助可以有效提升接收机在高动态下对弱信号的稳定跟踪能力,并能极大地减小环路带宽,提高对外界噪声的抑制能力。研究结果为接收机跟踪环路的带宽设计提供了参考,对SINS/GNSS组合导航的深入研究具有指导意义。
参考文献:
[1] ALIREZAR,DEMOZ G E,DENNIS M A.Carrier loop architectures for tracking weak GPS signals[J].IEEE transactions on ae-rospace and electronic systems,2008,44(2):697-710.
[2] 于海亮.基于INS辅助的GPS接收机捕获和跟踪技术研究[D].长沙:国防科学技术大学,2007.
[3] KAPLAN E D,HEGARTY C J.Understanding GPS:principle and applications[M].2nd edition.Boston:Artech House Inc,2006:155-162.
[4] 汤霞清,程旭维,武萌,等.INS 辅助的 PLL 最优带宽设计及性能分析[J].装甲兵工程学院学报,2015,29(3):75-80.
[5] 王文静.高动态环境下卫星导航信号跟踪技术研究[D].哈尔滨:哈尔滨工业大学,2013.
[6] 叶萍.MENS IMU/GNSS超紧组合导航技术研究[D].上海:上海交通大学,2011.
[7] 陈坡.GNSS/INS深组合导航理论与方法研究[D].郑州:信息工程大学,2013:51-72.
