基于自适应EEMD样本熵的行星齿轮箱特征提取方法
2017-05-02陆军装甲兵学院车辆工程系北京100072
(陆军装甲兵学院车辆工程系,北京 100072)
行星齿轮箱的工况条件恶劣,齿轮经常发生严重点蚀、疲劳裂纹和断齿等故障。由于齿轮故障信号在传递过程中容易出现干扰及衰减,导致传感器采集到的信号成分复杂,存在明显的非线性与非平稳性[1],因此传统的信号分析处理方法难以对行星齿轮故障特征进行有效提取。
经验模态分解(Empirical Mode Decomposition,EMD)[2]是一种适用于处理非线性、非平稳信号的方法, 该方法对信号进行分解时不依赖参数的选择,而是根据信号自身的内在特性将原信号自适应地分解为若干个固有模态函数(Intrinsic Mode Function,IMF)分量,其每个IMF分量均包含了原信号中不同频率上的局部特征。然而,当信号受混叠脉冲干扰时,EMD分解存在模态混叠现象。在此基础上,聚合经验模态分解(Ensemble Empirical Mode Decomposition,EEMD)方法应运而生,它通过对采集的振动信号加入特定的高斯白噪声序列,明确分析时间尺度,促进抗混分解,可有效解决EMD分解中出现的模态混叠问题,更加精确地反映原始信号的特征信息[3]。但EEMD方法的分解效果依赖于添加白噪声时选择的幅值与筛选次数等参数,具有较大的盲目性和主观性。而自适应EEMD方法在分解过程中可根据信号本身自适应地改变加入白噪声的幅值,并对每个IMF分量自动选择不同的筛选次数,能够进一步解决模态混叠问题,提高信号分解的精度和自适应性[4]。此外,样本熵(Sample Entropy,SE)是一种计算时间序列复杂度的算法,对非线性、非平稳信号具有很好的检测能力[5],且较近似熵的统计精度更高,降低了对时间序列长度的依赖性,具有更好的一致性,同时系统不同的运行状态会对应不同的样本熵值,这样可很好地表征系统的运行状态,特别适用于行星齿轮箱的故障诊断[6]。
基于此,笔者提出一种自适应EEMD与样本熵相结合的特征提取方法,首先对信号加入幅值随频率呈正弦规律变化的噪声,然后将采集的行星齿轮箱振动信号进行自适应EEMD分解,获得若干个IMF分量,再根据相关性分析提取含有状态特征信息的IMF分量并重构信号,最后对重构信号进行样本熵计算,判断行星齿轮箱的运行状态。
1 相关原理
1.1 自适应EEMD方法原理
EEMD方法的基本原理为:根据白噪声具有零均值的特性,取多次分解得到的IMF分量均值作为计算结果,以最大程度地消除加入的辅助白噪声;然后在原信号中叠加高斯白噪声之后进行多次EMD分解,使原信号在不同时间尺度上具有连续性,削弱EMD算法中存在的模态混叠现象。EEMD方法具体计算步骤详见文献[6]。
为了更加有效地削弱模态混叠现象,需要对分解的高频IMF分量加入幅值较大的白噪声和较多的筛选次数,在分解低频IMF分量时加入幅值较小的白噪声和较少的筛选次数。共分2步进行:
1) 为了实现自适应EEMD方法中对添加白噪声的要求,加入幅值随频率呈正弦规律变化的白噪声ns(t)。该噪声在高频处的幅值较大,在低频处的幅值较小,可自适应地调节噪声幅值,其构造方法为:(1)对高斯白噪声进行傅里叶变换,得到频谱n(f),其中f∈(0,fs/2),fs为采样频率;(2)令ns(f)=n(f)sin(2πf/fs);(3)对ns(f)进行傅里叶逆变换,得到噪声ns(t)。该噪声频谱如图 1所示。
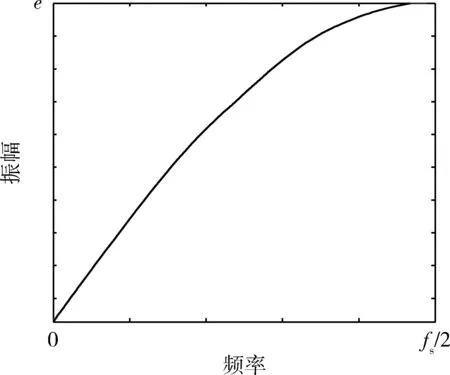
图1 构造的噪声频谱
2) 由文献[7]可知:IMF分量所占的频带范围呈2的指数次方衰减,高频IMF分量较低频IMF分量的模态混叠现象严重,且相邻IMF分量需要筛选次数相差较大时才能有效减少模态混叠。自适应EEMD方法分析振动信号的具体步骤为:
(1) 设定添加的白噪声次数,即总体平均次数M=200,白噪声的最高频率成分的幅值系数e=0.2,令初始值h=1。
(2) 计算待分解振动信号IMF分量个数
N=log2L-1,
(1)
式中:L为数据长度。
(3) 对于第k(k=1,2,…,N)个IMF分量,设定自适应筛选次数
pk=2N-k2+2。
(2)
(4)将构造的ns(t)加入待分解信号中。
(5)利用EMD分解方法,将加噪信号分解为一系列IMF分量。
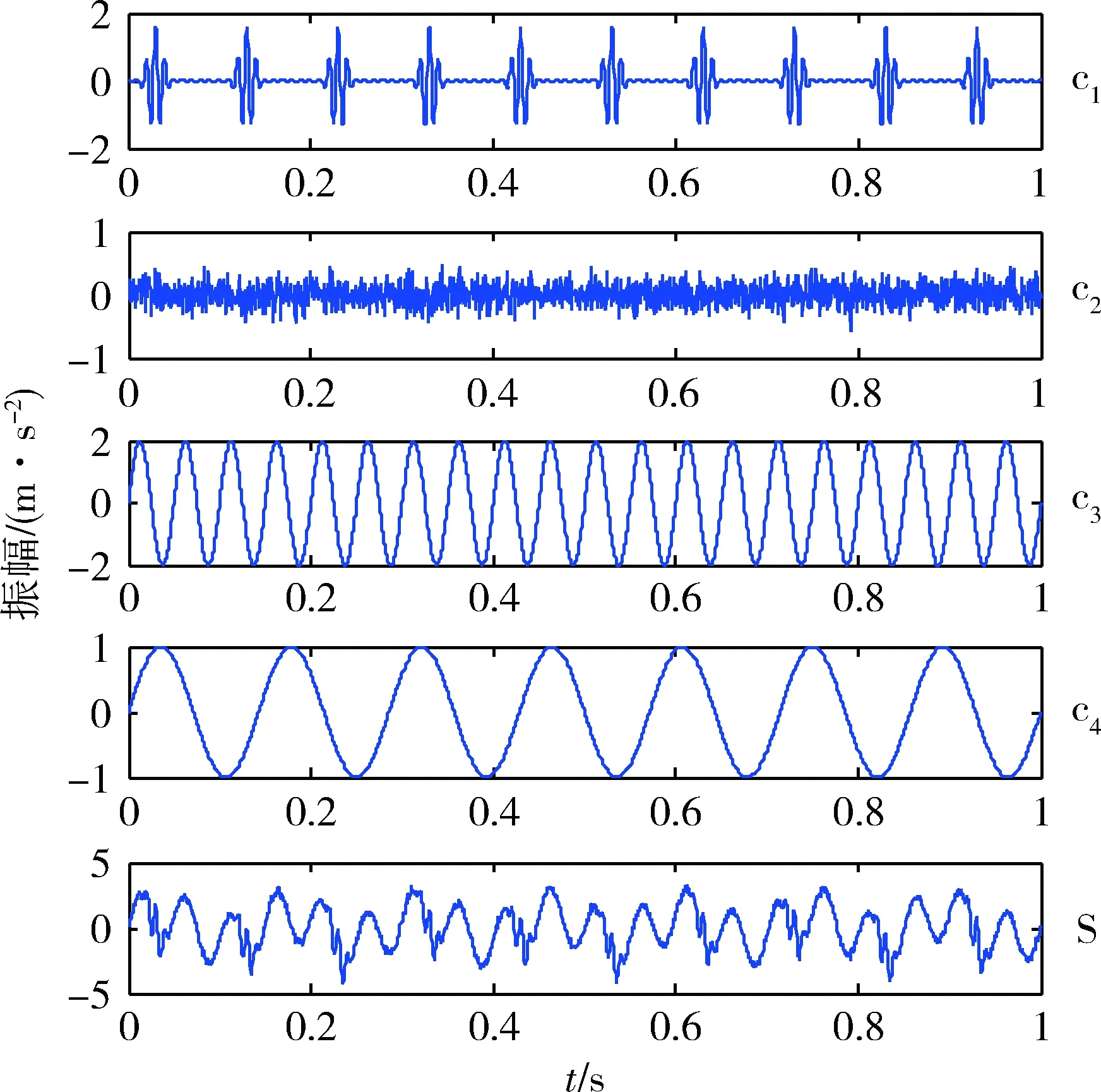
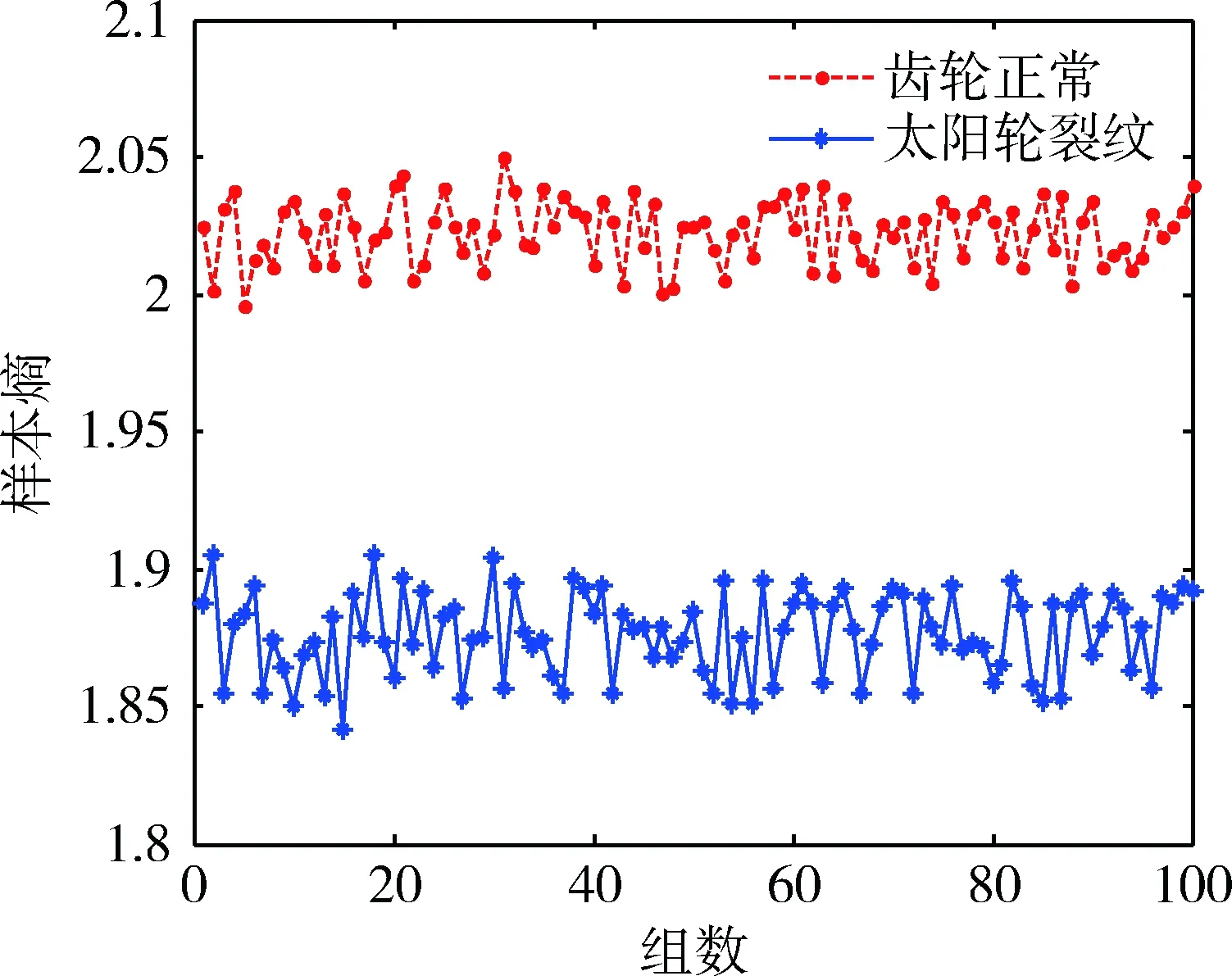
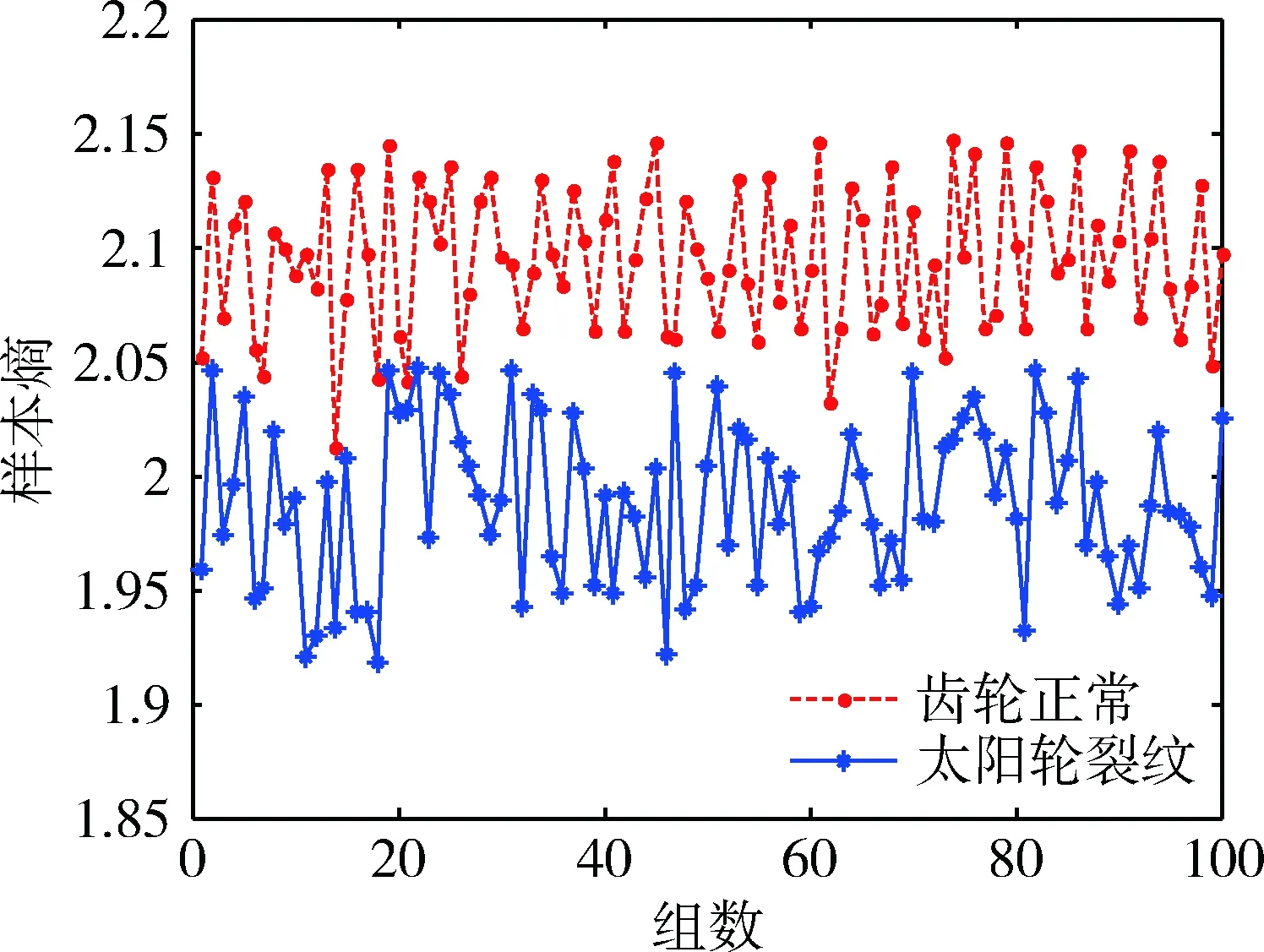
(6)判断h值的大小,若h (7)对M次分解出的IMF分量求均值,并将其作为最终自适应EEMD分解的结果。 样本熵衡量机械振动信号复杂度的主要表现为:复杂度越高,样本熵值越大;反之,样本熵值越小,且样本熵的计算不需要自我匹配度,计算速度快,精度高,可以对振动信号进行有效分析[8]。样本熵的计算流程如图2所示。 图2 样本熵计算流程 样本熵的计算公式为 SE(m,r,L)=-ln(Bm+1(r)/Bm(r)), (3) 式中:m为模式维数;r为相似容限;Bm(r)、Bm+1(r)分别为m、m+1时的数据平均相似度。由式(3)可知:m越大,样本熵值计算时所需数据量越多,耗时越长;r越小,信号中噪声干扰的影响越明显。 由文献[4,9]及多次试验对比分析可知:m、r可参照近似熵的计算取值,即m=1或2,r=0.1~0.25MSE(MES为信号的标准差),在这一范围内取值所得的样本熵结果较为合理,且可进行有效的特征提取。在实际分析中,L的取值需要根据数据中包含的状态信息进行选取,鉴于行星轮系传动的复杂性,计算样本熵时要保证分析数据中包含的状态信息量一致,这样计算结果才有可信度,因此数据长度应至少包含一个完整的工作周期。 基于自适应EEMD样本熵的行星齿轮故障特征提取步骤如下: 1) 对采集获取的原信号进行自适应EEMD分解,获得一组IMF分量; 2) 计算每个IMF分量自相关函数与原信号自相关函数的相关系数,根据文献[10]筛选出相关系数大于0.5的IMF分量,对其进行重构; 3) 计算重构信号的样本熵值,作为行星齿轮箱的特征参量。 特征参量虽然能对系统的健康状态和损伤状态进行分类,却无法直观地评价哪个特征参量具有更佳的分类能力,因此需要引入量化指标来评估特征参量,以此作为特征选择的依据。敏感度适用于评估同一工况条件下特征参量对2类样本集之间的分类距离,敏感度越高,说明所选择的特征参量对各类样本集间的分类能力越强[11-12]。其中,双样本Z值检验法可对2类样本集在统计上的不同进行有效评估,其计算结果能作为评价特征分类距离的依据,特征参量的Z值越大,说明其分类距离越大。定义特征参量的敏感度 (4) 式中:X1={x11,x12,…,x1j}和X2={x21,x22,…,x2j}为2类样本集的某特征参量;Ni(i=1,2)为Xi的样本数; (5) (6) 分别为Xi的均值和标准差。 采用仿真信号对自适应EEMD样本熵方法的有效性进行检验。使用仿真信号S模拟旋转机械设备出现故障时的振动信号,其包含冲击成分c1、噪声成分c2、高频成分c3、低频成分c4,如图3所示。 图3 仿真信号S 为便于对比,利用自适应EEMD方法和EEMD方法对仿真信号进行分解,其结果分别如图4、5所示。可以看出:EEMD方法分解获得的第1层IMF分量中同时包含噪声成分c2和部分冲击成分c1,且出现了模态混叠现象;自适应EEMD方法分解得到的前4层IMF分量依次对应原信号中的噪声成分c2、冲击成分c1、高频成分c3、低频成分c4,且各分量与原信号对应成分的振幅几乎一致,各IMF分量中的成分单一,没有出现模态混叠现象。上述结果表明:自适应EEMD方法不仅能够提取出原信号中的信息,且更好地削弱了模态混叠现象,比EEMD方法更加优越。 图4 仿真信号自适应EEMD分解结果 图5 仿真信号EEMD分解结果 为验证基于自适应EEMD样本熵的行星齿轮故障提取方法的应用效果,分别对行星齿轮箱齿轮正常信号和太阳轮裂纹故障信号进行分析。在试验中,设置太阳轮某轮齿齿根处裂纹深度为1 mm,沿齿宽方向贯穿整个轮齿。图6为行星齿轮变速箱故障模拟试验台,该试验台主要由驱动电机、行星齿轮箱、定轴齿轮箱、磁粉制动器和采集系统等组成。 本试验台中,行星齿轮箱的内齿圈固定不动,由太阳轮轴与驱动电机输出轴相连,行星架输出转速。行星齿轮箱相关参数如表1所示。 图6 行星齿轮变速箱故障模拟试验台 参数数值太阳轮齿数20行星轮齿数40内齿圈齿数100行星轮个数3太阳轮转频/Hz40行星架转频/Hz6.67行星轮自转频率/Hz16.67啮合频率/Hz666.67 在试验过程中,2种状态下采集的振动信号均在有负载的情况下完成,其中驱动电机转速为2 400 r/min,采样频率为5 120 Hz,采样时间为1 s。由表1可知:行星轮自转频率为行星架转频的2.5倍,则行星轮的一个完整工作周期为0.3 s,太阳轮的一个完整工作周期为0.025 s。综上,该行星齿轮系统一个完整工作周期耗时0.3 s,行星齿轮完成1个整周期工作,则太阳轮完成12个整周期工作。因此,在样本熵计算中,数据采样时间取值为0.3 s,采样数据长度L=1 536。 采集得到的行星齿轮箱齿轮正常信号和太阳轮裂纹故障信号对应的时域和频域波形图如图7、8所示。 由图7、8可知:齿轮正常和太阳轮裂纹故障时,振动信号的时域波形和频域波形的振幅差别不大。这是因为:行星齿轮箱运转时,通常有多对齿轮同时啮合,其产生的振动相互耦合、相互抵消、相互调制,使得所测振动信号振幅相差不大,且存在明显的非线性和非平稳特性。 图7 行星齿轮箱振动信号时域波形 图8 行星齿轮箱振动信号频域波形 对信号进行自适应EEMD分解,同时确定添加白噪声最高频率的幅值,初始化e=0.2,总体平均次数M=200。图9为行星齿轮箱齿轮正常及太阳轮裂纹振动信号原信号及自适应EEMD分解的前6个IMF分量。 自适应EEMD分解后,前6个IMF分量与原信号自相关函数的相关系数如表2所示。可知:只有IMF1、IMF2分量的相关系数大于0.5。因此对IMF1、IMF2分量进行重构,如图10所示,重构信号的自适应EEMD样本熵如图11所示。由图 11可以看出: 1)齿轮正常时的自适应EEMD样本熵大于太阳轮裂纹的样本熵。这是因为:当行星齿轮箱正常工作时,振动由齿轮自身刚度所引起,齿轮的振幅较小,振动信号相对复杂、无规律;当齿轮发生太阳轮裂纹故障时,振动信号中会产生有规律的冲击成分,因而其复杂度降低,样本熵随之减小。 2) 不同状态下的样本熵未出现交叉,这说明自适应EEMD样本熵方法将行星齿轮箱的运行状态进行了有效刻画,提取出了故障特征。 上述结果表明:自适应EEMD样本熵方法可对齿轮振动信号的复杂程度进行度量,以及表征齿轮箱系统的异常故障状态。 采用同样的分析方法,计算原信号EEMD样本熵与直接样本熵,结果分别如图12、13所示。对比图12、13可知:经自适应EEMD重构后的样本熵对齿轮状态具有更好的区分度。 图9 行星齿轮箱振动信号原信号及自适应 EEMD分解的前6个IMF分量 表2 自适应EEMD分解后前6个IMF分量的相关系数 图10 IMF1、IMF2分量的重构信号 图11 重构信号的自适应EEMD样本熵 图12 原信号EEMD样本熵 图13 原信号直接样本熵 表3为行星齿轮箱振动信号样本熵统计结果。可以看出:与直接样本熵相比,自适应EEMD样本熵及EEMD样本熵的均值及方差都较小。分析其原因为:通过EEMD重构,振动信号去除了背景噪声和对故障状态不敏感的成分,减小了噪声对样本熵的影响,使得信号的复杂度降低,样本熵也随之减小。这说明自适应EEMD重构方法适用于行星齿轮箱振动信号降噪。 表3 行星齿轮箱振动信号样本熵统计结果 通过敏感度Z值检验法对2类特征参量的分类能力进行了评估,结果发现:自适应EEMD样本熵的敏感度Z值均大于EEMD样本熵及直接样本熵,区分度更好,这是因为自适应EEMD更好地削弱了模态混叠现象,能准确地分解出原信号中的频率成分,经重构后的信号更能体现原信号中的状态信息,这说明自适应EEMD样本熵的分类能力更强,体现了自适应EEMD样本熵的优越性。 笔者将构造幅值随频率变化的噪声替换EEMD中随机添加的白噪声,并自适应地对每个IMF分量的筛选次数进行选取,提出了自适应EEMD样本熵方法,通过提取行星变速箱齿轮故障特征验证了其有效性。结果表明:自适应EEMD样本熵方法可有效削弱模态混叠现象;基于自适应EEMD样本熵对行星齿轮箱特征提取具有很好的效果,能够较好地反映行星齿轮箱齿轮故障特征,且相对于直接样本熵及EEMD样本熵等特征提取方法具有更强的分类能力。 参考文献: [1] 雷亚国,何正嘉,林京,等.行星齿轮箱故障诊断技术的研究进展[J].机械工程学报,2011,47(19):59-67. [2] CHENG G,CHEN X,LI H,et al. Study on planetary gear fault diagnosis based on entropy feature fusion of ensemble empirical mode decomposition[J].Measurement,2016,91(15):140-154. [3] 陈仁祥,汤宝平,杨黎霞,等. 自适应参数优化EEMD机械故障特征提取方法[J].振动、测试与诊断,2014,34(6):1065-1071,1169-1170. [4] 赵志宏,杨绍普. 一种基于样本熵的轴承故障诊断方法[J].振动与冲击,2012,31(6):136-140,154. [5] 张志艳,马宏忠,杨存祥,等. 小波包与样本熵相融合的PMSM失磁故障诊断[J].电机与控制学报,2015,19(2):26-32. [6] 楼军伟,胡赤兵,王季,等.基于EEMD样本熵的电机轴承电流信号复杂性评估[J].机械制造与自动化,2014,43(5):36-39. [7] 雷亚国,孔德同,李乃鹏,等.自适应总体平均经验模式分解及其在行星齿轮箱故障检测中的应用[J].机械工程学报,2014,50(3):64-70. [8] 赵志宏,杨绍普.基于小波包变换与样本熵的滚动轴承故障诊断[J].振动、测试与诊断,2012,32(4):640-644,692. [8] 林海波,龚璐.基于改进HHT和样本熵的脑电信号特征提取[J].计算机工程与设计,2015,36(6):1608-1613. [10] 陈仁祥,汤宝平,吕中亮.基于相关系数的EEMD转子振动信号降噪方法[J].振动、测试与诊断,2012,32(4):542-546,685. [11] 王书涛,李亮.基于EEMD样本熵和GK模糊聚类的机械故障识别[J].中国机械工程,2013,24(22):3036-3040,3044. [12] 程哲.直升机传动系统行星轮系损伤建模与故障预测理论及方法研[D].长沙:国防科学技术大学,2012.1.2 样本熵原理

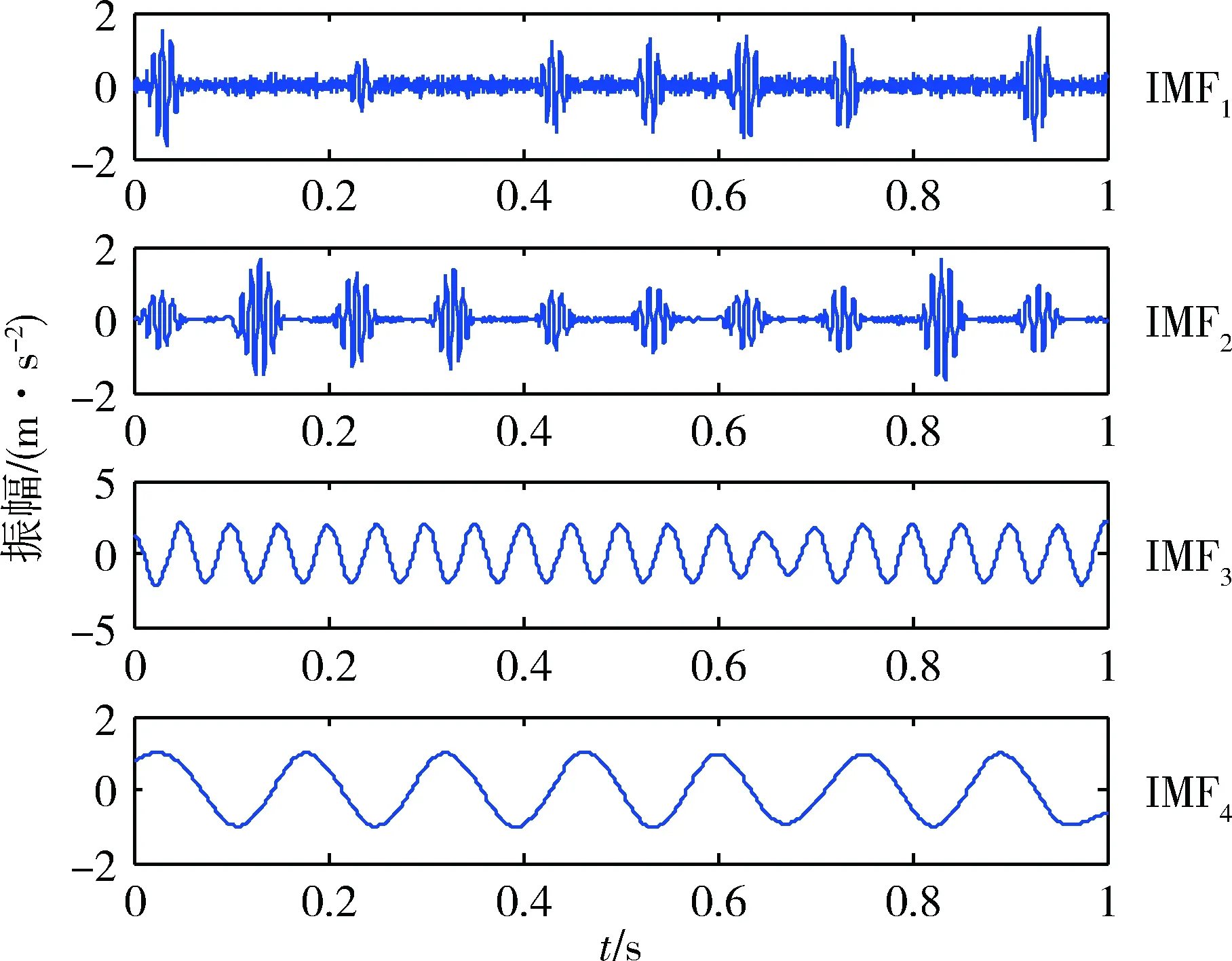
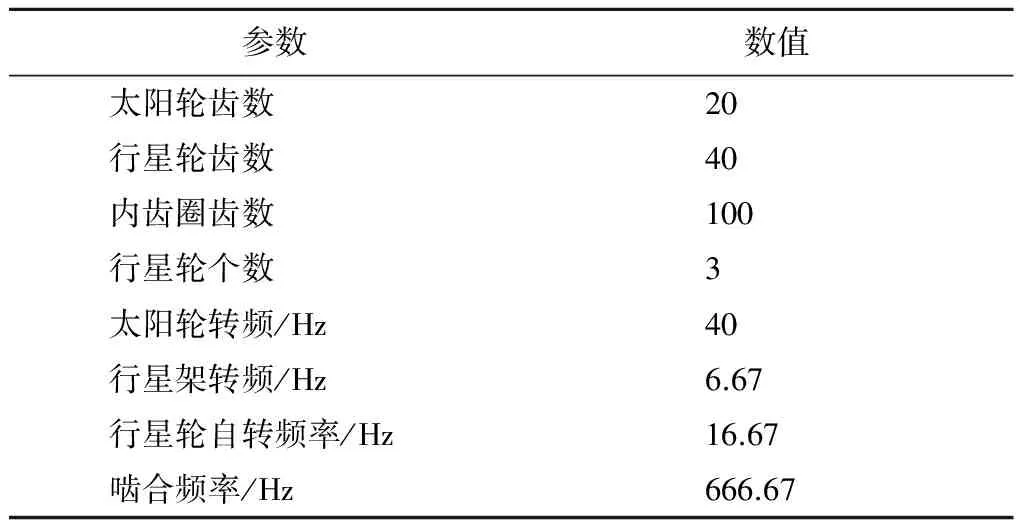
2 特征提取方法
2.1 特征提取步骤
2.2 特征参量评估
3 仿真试验

4 实例分析
4.1 实测振动信号采集

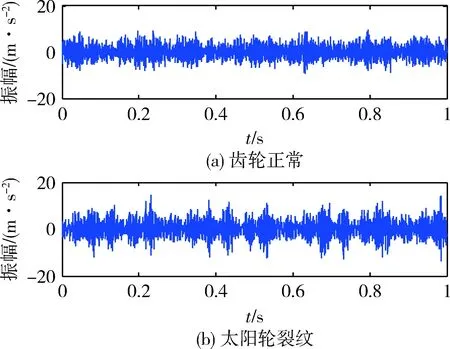
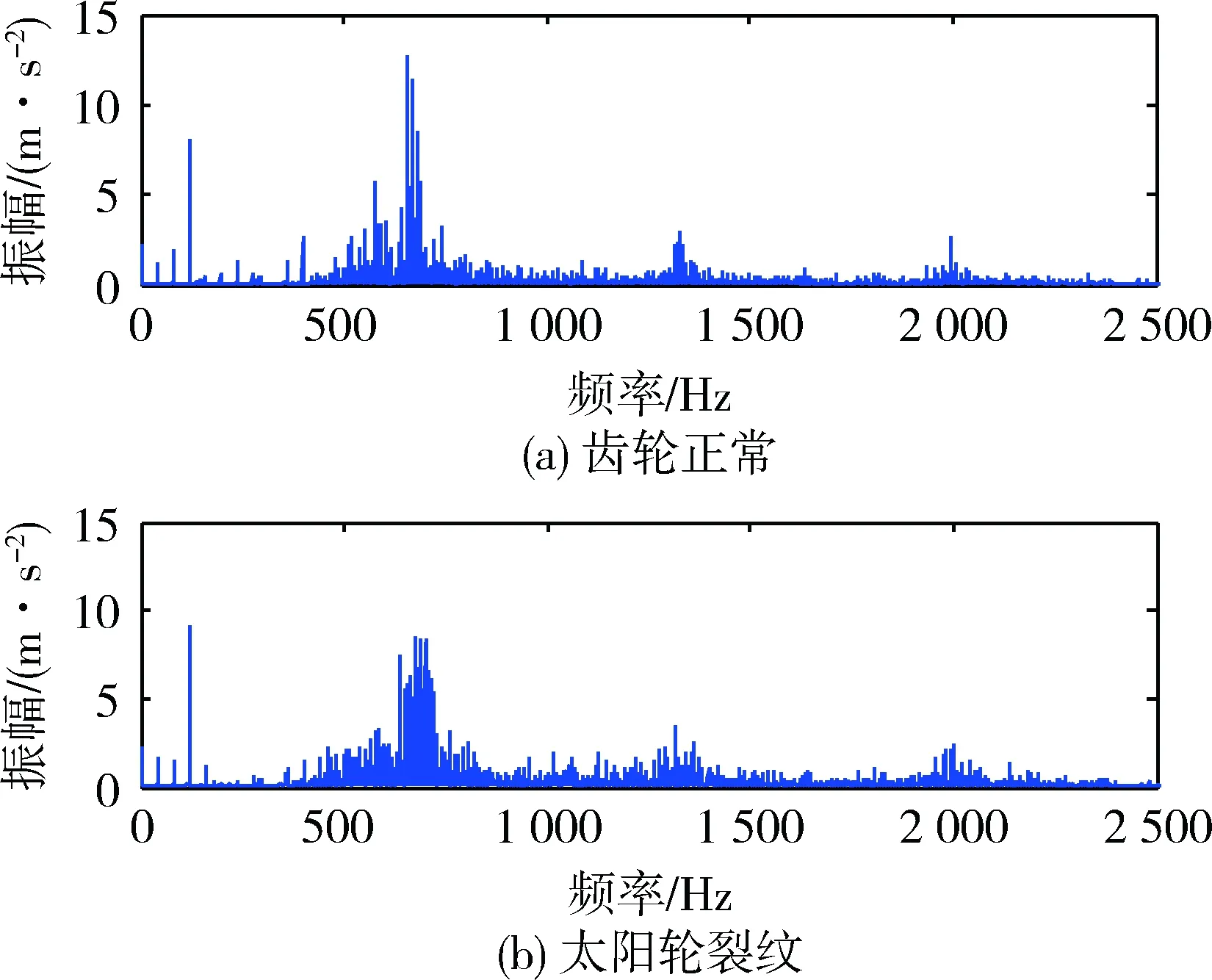
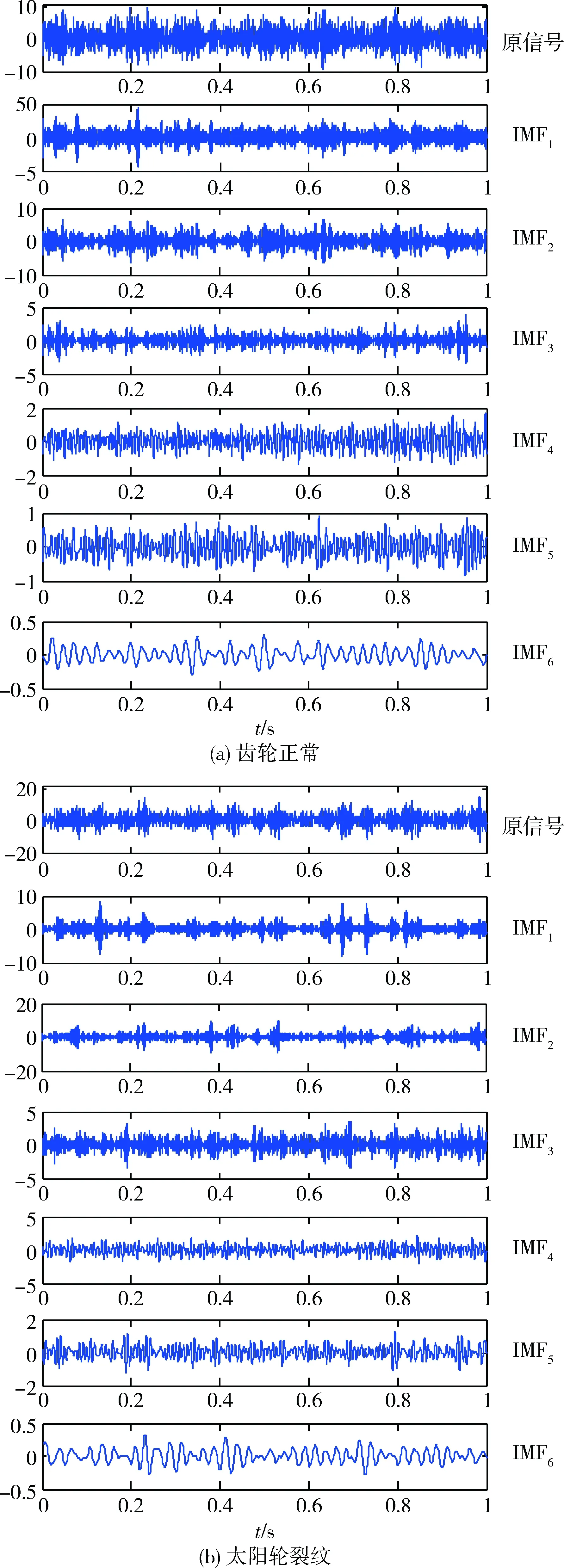
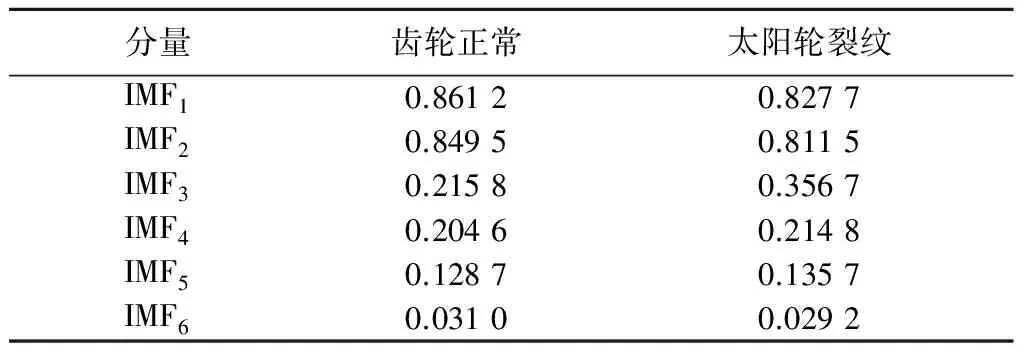
4.2 自适应EEMD样本熵
4.3 不同特征参量对比


5 结论
