基于似然分布自适应调整的SMC-PHDF算法
2017-04-28刘成涛马全海
刘成涛,马全海
(西安工程大学 电子信息学院,西安 710048)
【基础理论与应用研究】
基于似然分布自适应调整的SMC-PHDF算法
刘成涛,马全海
(西安工程大学 电子信息学院,西安 710048)
SMC-PHDF(Sequential Monte Carlo-Probability Hypothesis Density Filter)算法由于不受高斯和线性的限制,在目标跟踪领域有着广泛的应用;然而当系统量测噪声较大,很多样本的归一化权重很小而成为无效样本,最终导致SMC-PHDF算法滤波精度较低;针对这一问题提出似然分布自适应调整的SMC-PHDF算法,通过在更新步骤中自适应调整粒子权值,增加先验密度和似然的重叠区,从而达到提高滤波性能的目的;仿真结果表明:在系统量测噪声较大时该算法比传统SMC-PHDF算法的滤波效果有所提升。
SMC-PHDF;测噪声;自适应;先验密度
目标跟踪在诸多领域都得到了广泛的应用,其中在军事和民用领域应用较多。在军事领域中,主要涉及各种防卫系统、空中攻击、战场监视、精确制导等核心技术;在民用领域中,主要应用于海岸监视系统、交通管制、导航和计算及视觉等重要场所[1]。目标跟踪技术一经诞生,便一直保持着计算机视觉领域研究的热点,对其研究具有非常重要的现实意义,。
Mahler针对多目标跟踪在贝叶斯框架的基础上提出了概率假设密度滤波(probability hypothesis density filter,PHDF),其实现方式主要有两种:GM-PHDF和SMC-PHDF,前者对模型有着线性和高斯的要求,从而限制了自身的应用。而后者SMC-PHDF算法却很好地克服了GM-PHDF的限制条件[2]:它应用随机采样的方式获取诸多的粒子,以此诸多粒子的样本均值近似替代概率假设密度滤波的更新粒子权值[3-4]。SMC-PHDF算法是基于蒙特卡洛的抽样思想,具有很高的现实执行性,在一些对滤波精度稍低的情形下有着较好的适用性和实用性。然而在对量测精度要求较高的滤波实例中却因为其自身的机制——很多粒子在迭代过程中因为权值较小对滤波无价值,导致滤波精度过低,甚至是失败。目前,解决办法是增大粒子个数,但是由于现行硬件条件的限制,这种方法在实际应用中显然是不可行的[5-6]。
针对量测噪声较大时滤波性能不高的问题,本文提出了一种似然分布自适应调整SMC-PHDF算法,即根据参数β值的大小在SMC-PHDF算法的更新步骤中动态调整粒子权重,有效提高了滤波稳定性。
1 SMC-PHDF 算法
SMC-PHDF算法的实现最后要归结于对粒子的处理,所以首先要对每一时刻的粒子数目进行定义。假设k-1时刻的粒子数目为Lk-1,k时刻新生目标采样所对应的粒子数为Jk,Lk为k时刻采样粒子总数,则可得Lk=Jk+Lk-1。
1.1 SMC-PHDF预测
预测步骤中的预测分为两部分:新生目标的预测和存活目标的预测,并且分别需要预测对应的权值和状态。其预测方程分别为式(1)、式(2),其中新生目标对应为下式:
(1)
其中i=Lk-1+1,Lk-1+2,…,Lk-1+Jk,对于存活目标,目标状态和权重的预测由下式得到:
(2)
1.2 SMC-PHDF更新
更新步骤中,需要根据最新的量测集对相应的粒子权重进行更新,以保持算法最新的记忆有效性,对应的权重更新方程为
(3)
(4)
(5)
2 似然分布自适应权值更新方法
似然函数的分布于粒子权重相等同,对前者的调整就是对后者的自适应改变,因此,只需要对SMC-PHDF的权值更新作自适应改进。自适应调整权重过程步骤:
1) 对于预测步骤得到的粒子,更新粒子权值。
3) 确定β值,重新计算权值:
其中,β为自适应调整时选取的参数,其大小值由实际的量测集的噪声来决定。
(6)
式(6)中:ε为阈值,K为比例常数,K/α>0。
3 似然分布自适应SMC-PHDF算法
基于上述的似然分布自适应权值更新方法,改进的自适应SMC-PHDF算法流程如下:

(7)
(8)
(9)
(10)
(11)
(12)
(13)
根据上一节似然分布自适应权值调整方法调整权重,输出调整之后的权重:
步骤4:计算权重之和
(14)
4 算法仿真与分析
4.1 目标跟踪模型
本次仿真假设目标的运动轨迹为匀速直线型,对应的方程式为
(15)
式(15)中:xk表示目标运动状态,其表达式为xk=[x,vx,y,vy]T,其中(x,y)表示目标的位置信息,(vx,vy)表示目标的速度信息;假设传感器方位角进行集中式融合处理,观测方程为
(16)
(17)
4.2 参数设置


4.3 仿真结果
在量测噪声的值分别取β=0,β=0.25,β=0.50,β=0.75条件下进行仿真对比实验,其中β=0为采用SMC-PHDF算法,β取0.25、0.50、0.75为采用似然分布自适应SMC-PHDF算法。图1为目标运动轨迹,图2、图3、图4为两种算法仿真结果。
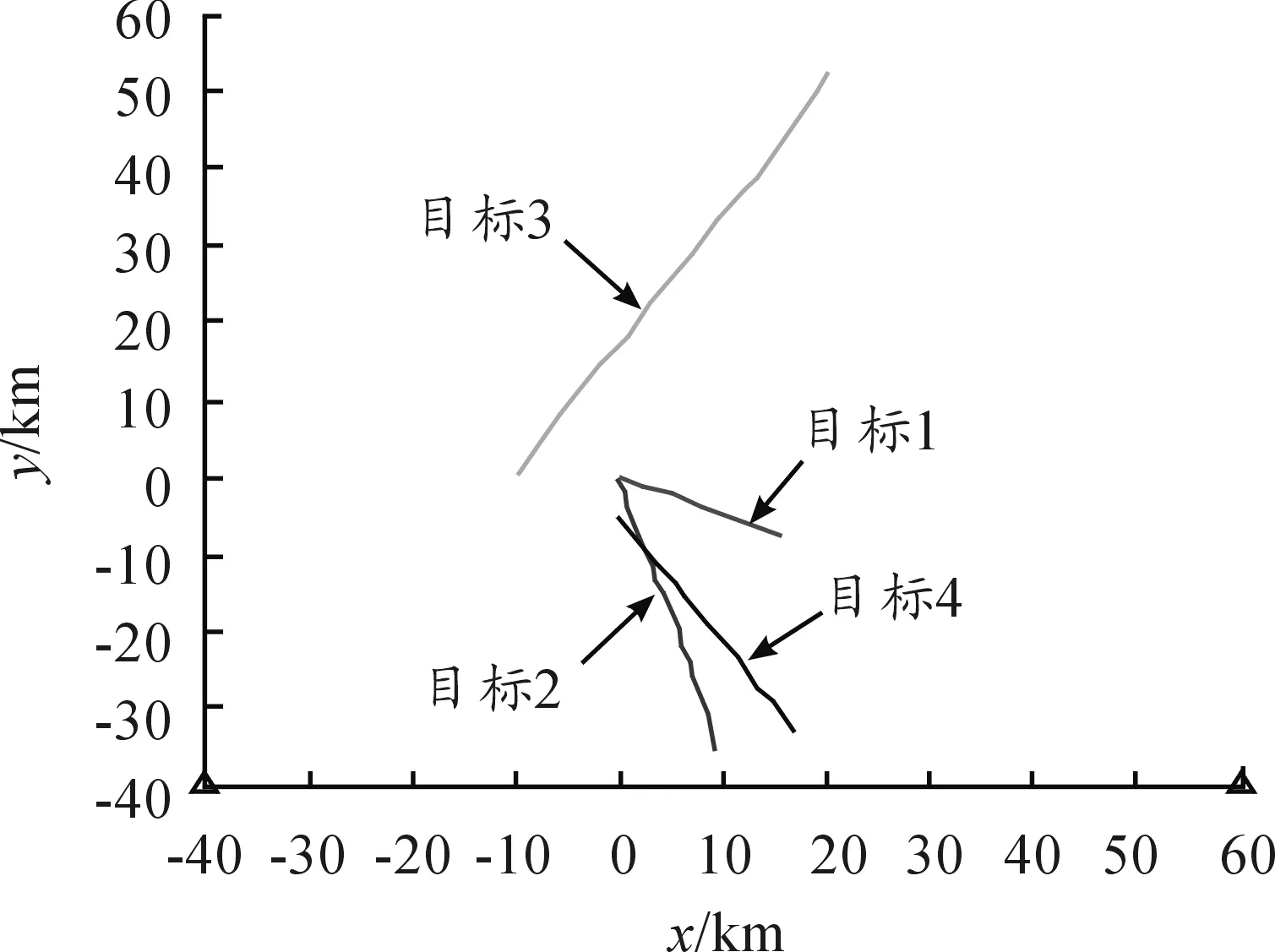
图1 目标运动轨迹
图1给出了4个目标在监视范围内做直线运动时的运动轨迹以及它们具体的出现时刻和消失时刻。传感器的具体坐标位置在4.2节已给出,图1中其位置位于坐标轴上。
图2则给出了几种参数不同时估计目标与真实坐标之间的X和Y坐标对比。其中,β=0.25的滤波效果在6、7、8时刻对目标位置的估计优于β=0的滤波效果,19、20、31时刻的位置估计略差于β=0的滤波效果,总体上β=0.25的滤波效果和β=0 (SMC-PHDF算法)基本相同。然而在β=0.50和β=0.75时,自适应SMC-PHDF算法的滤波效果明显优于传统的SMC-PHDF算法,尤其在β=0.75时,自适应SMC-PHDF算法对目标位置的跟踪一直到38时刻,而传统的SMC-PHDF算法仅到32时刻。通过上述对比可知,改进的自适应SMC-PHDF算法滤波效果比传统的SMC-PHDF算法好,且在改进的自适应SMC-PHDF算法中β值越大滤波效果越明显。

图2 估计目标坐标对比
图3给出了β取不同值时整个观测时间内改进的自适应SMC-PHDF算法与传统SMC-PHDF算法对目标数的估计。由图3可知,传统SMC-PHDF算法在第6、7、8以及33时刻之后均误估计了目标数。改进的自适应SMC-PHDF算法 β=0.25时在6、7、8正确估计了目标数目,但在19、20以及30时刻之后均误估计了目标数;β=0.50时在7、8以及34时刻之后误估计了目标数;而β=0.75时在仅在7、8时刻误估计了目标数,相比前3种取值有着较好的目标估计效果。
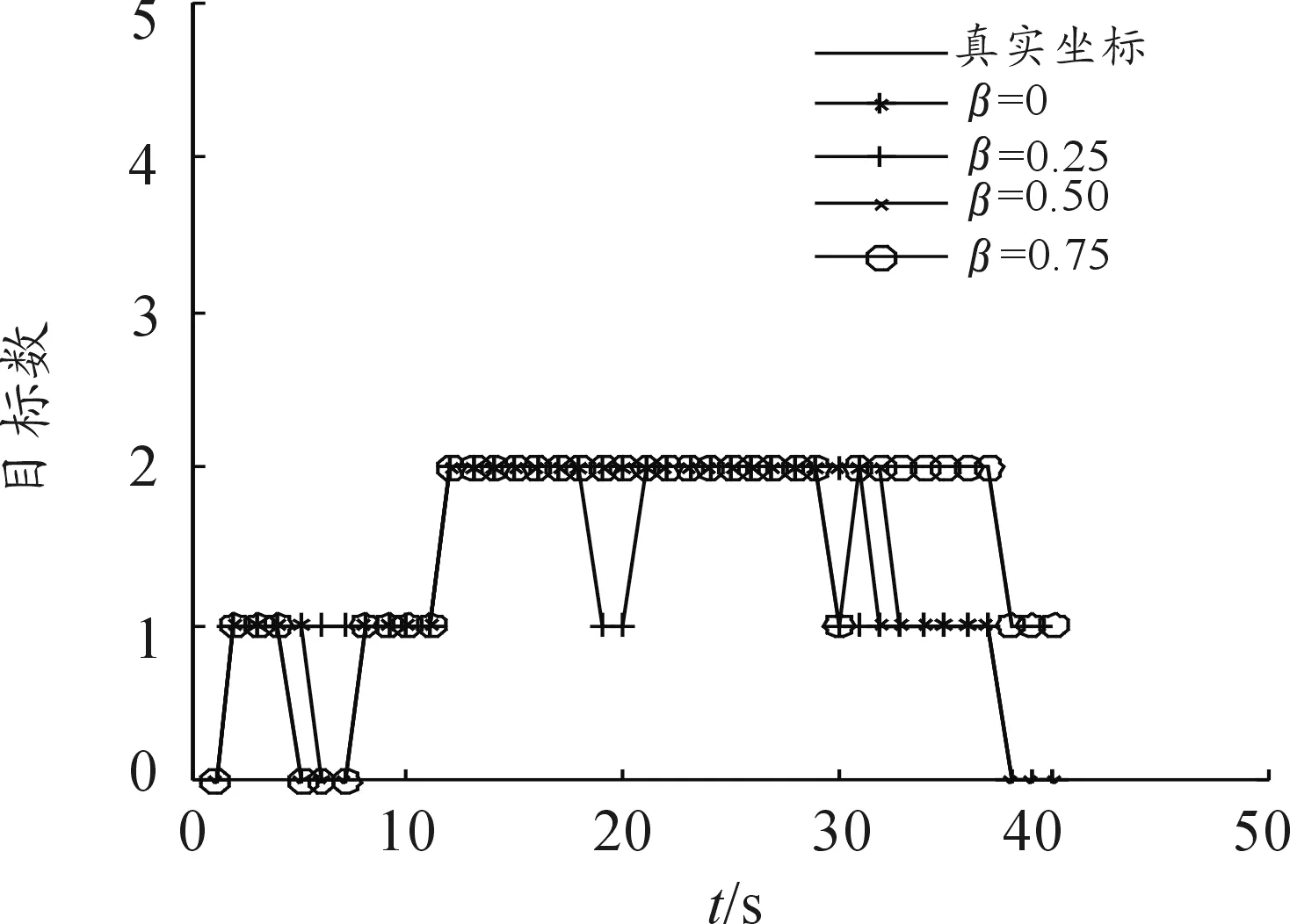
图3 目标数目估计
SMC-PHDF算法在对目标数目误估计时,Wasserstein距离与估计误差成正比。分析图4可得,随着β值的增大,Wasserstein距离减小(估计误差越小),即对目标的估计越准确。由此可知,改进的自适应SMC-PHDF算法较传统的SMC-PHDF算法滤波性能好。
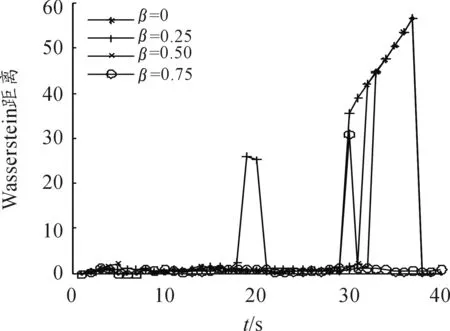
图4 Wasserstein距离
5 小结
针对系统量测噪声较大时,很多样本的归一化权重很小而成为无效样本,导致SMC-PHDF算法滤波精度较低的情况,本文提出一种似然分布自适应SMC-PHDF算法。该算法通过在更新步骤中引入自适应调整粒子权值,达到提高滤波性能。在本文的实验条件下,通过仿真结果表明:改进的似然分布自适应SMC-PHDF算法取β=0.75时的滤波效果较传统SMC-PHDF算法有较大的提升。
[1] HANDSCHIN J E.Monte Carlo Techniques for Prediction and Filtering of Non-linear Stochastic Processes[J].Automatica,1970,6(4):555-563.
[2] CLARK D E,ICPANTA B N.The GM-PHD Filter Multiple Target Tracker[J].International Conference on Information Fusion,2006,9(8):1-8.
[3] 庄泽森,张建秋,尹建君.Rao-Blackwellized粒子概率假设密度滤波算法[J].航空学报,2009,30(4):1264-1270.
[4] VO B,SINGH S,DOUCET A.Sequential Monte Carlo Implementation of the PHD Filter for Multi-target Tracking[C]//Proc Intel Conf.on Information Fusion,Cairns,Australia,2003,9(6):792-799.
[5] TORMA P,SZEPESVARI C.On Using Likelihood-adjusted Proposals in Particle Filtering:Local Importance Sampling[C]//Proceeding of the 4th International Symposium on Image and Signal Processing and Analysis,2005,14(9):58-63.
[6] 艾伟.基于自适应粒子滤波人体运动视频跟踪方法研究[D].长沙:中南大学,2008.
[7] MAHLER R.Multitarget Bayes Filtering Via first-order Multitarget Msoments[J].IEEE Transactions on Aerospace and Electronic Systems,2003,39(4):1152-1178.
[8] MAHLER R.A Theory of PHD Filters of Higher Order in Target Number[C]//Proceedings of the 2006 Signal and Data Processing of Small Targets.Orlando,FL:SPIE,2006.62350K-62350K-12.
[9] CLARK D,RISTIC B,VO B N,et al.Bayesian Multi-object Filtering with Amplitude Feature Likelihood for Unknown Osbject SNR[J].IEEE Transactions on Signal Processing,2010,58(1):26-37.
[10]RISTIC B,VO B N,CLARK D.Performance Evaluation of Multi-target Tracking Using the OSPA Metric[J].Proceedings of the 13th International Conference of Information Fusion Edinburgh:IEEE,2010,16(3):1-7.
[11]彭东亮,文成林,徐晓滨.随机集理论及其在信息融合中的应用[J].电子与信息学报,2006,28(11):2199-2204.
(责任编辑 唐定国)
SMC-PHDF Algorithm Based on Likelihood DistributionAdaptive Adjustment
LIU Cheng-tao, MA Quan-hai
(School of Electronic Information, Xi’an Polytechnic University, Xi’an 710048, China)
The SMC-PHDF (Sequential Monte Carlo-Probability Hypothesis Density Filter) has been widely applied in the field of target tracking, because it is not restricted by Gaussian and linear model. However, when the value of system measurement noise becomes large, it brings a lot of samples normalized weights invalid and eventually leads to the problem of low precision filtering of SMC-PHDF algorithm. To solve this problem, the paper proposed an likelihood distribution adaptive SMC-PHDF algorithm, and it can adaptively adjust the value of particles in the update step and increase the overlap region between the prior density and the likelihood, thus to achieve the goal of performance to improve result of the filtering. The simulation results show that this algorithm has a better filtering effect than traditional SMC-PHDF algorithm when the measurement noise in the system is larger.
SMC-PHDF; measurement noise; adaptive; prior density
2016-11-22;
2016-12-22
国家自然科学
基金项目(62171300) 作者简介:刘成涛(1989—),女,助理工程师, 主要从事电子信息系统研究。
10.11809/scbgxb2017.04.037
刘成涛,马全海.基于似然分布自适应调整的SMC-PHDF算法[J].兵器装备工程学报,2017(4):179-182.
format:LIU Cheng-tao, MA Quan-hai.SMC-PHDF Algorithm Based on Likelihood Distribution Adaptive Adjustment[J].Journal of Ordnance Equipment Engineering,2017(4):179-182.
TP391
A
2096-2304(2017)04-0179-04
