基于无人机巡线图像的地面油气管道识别方法
2017-04-28雍歧卫喻言家
雍歧卫,喻言家
(后勤工程学院 a.军事供油系; b.研究生管理大队,重庆 401331)
【信息科学与控制工程】
基于无人机巡线图像的地面油气管道识别方法
雍歧卫a,喻言家b
(后勤工程学院 a.军事供油系; b.研究生管理大队,重庆 401331)
限于成本,无人机搭载的任务设备主要为普通数码相机,采集的是可见光图像,针对此种情况,提出了一种利用彩色分割及形状检测识别油气管道的方法,首先需要设定感兴趣区域ROI,计算出协方差矩阵C和均值m,并使用欧氏距离、马氏距离对图像进行彩色聚类分割,然后对分割图像填色后进行边缘检测,最后根据边缘图像进行霍夫变换来检测直线特征,实现复杂环境下对管道位置的自动定位。测试图像库包含300幅图像,识别准确率达到80.3%,实验结果表明,在色彩差异较大背景中,基于颜色和形状特征的识别方法能有效进行管线跟踪定位。
油气管道;无人机巡检;彩色分割;形状特征
目前,我国主要的油气输送方式依靠管道输送,随着管道覆盖面不断扩大,为了确保油气管线的安全运行,展开无人机巡线技术研究能够提高巡线效率,拥有巨大的市场潜力[1,2]。我国对无人机巡线系统的开发属于起步阶段,市场上的大多数无人机都只具备航线规划,相机增稳等简单功能,扮演着一个小型飞行器的角色。图像处理软件还主要集中在图像校正、图像拼接、三维建模等方面,缺乏对智能飞行,遥感数据后处理方面的研究[3-5]。在依靠可见光图像的目标精确检测与识别方面,主要依靠视觉特征、统计特征、变换特征、代数特征对目标进行识别判断[6-7]。基于此,作者提出了一种基于颜色与形状特征的油气管线识别方法,利用实验图像在Matlab平台进行仿真实验,实现了复杂环境下对油气管道的识别定位。
1 实验管道颜色与形状特征分析
实验油气管道铺设环境复杂多样,存在草丛、树木、建筑等各种背景元素的干扰,采集的图像如图1所示,采集条件为晴天顺光,管线目标区域环境色差较小,目标被部分遮挡,图1(a)管线颜色呈亮银色,图1(b)管线颜色呈淡黄色;管线形状均为直线。

图1 实验管线图像
2 油气管道的识别方法
2.1 颜色空间的分析选择
计算机将图片颜色数值化处理,建立相应的颜色空间模型,如RGB、HSI、HSV、Lab、CMYK、YUV、YIQ、YCbCr等,颜色空间之间可以互相转换。RGB颜色空间用一个三维矩阵表达颜色信息,每个元素值在0~255之间,优点为直观方便,便于转换,缺点是每个颜色分量都包含亮度信息,不利于图像分割。HIS、HVS是符合人眼视觉规律的颜色空间,优点是亮度与色度相互独立,在光照不均环境下色彩辨识度高,便于颜色的提取,但是在低光条件下对噪声敏感[8]。本研究利用实验图像,通过在RGB、YCbCr、Lab、HSV 4种颜色空间对比实验分析,如图2所示,发现目标管线在HSV颜色空间下,与背景区分较大,受光强的影响小,特征明显,适用于颜色的聚类分割。
2.2 颜色聚类分割

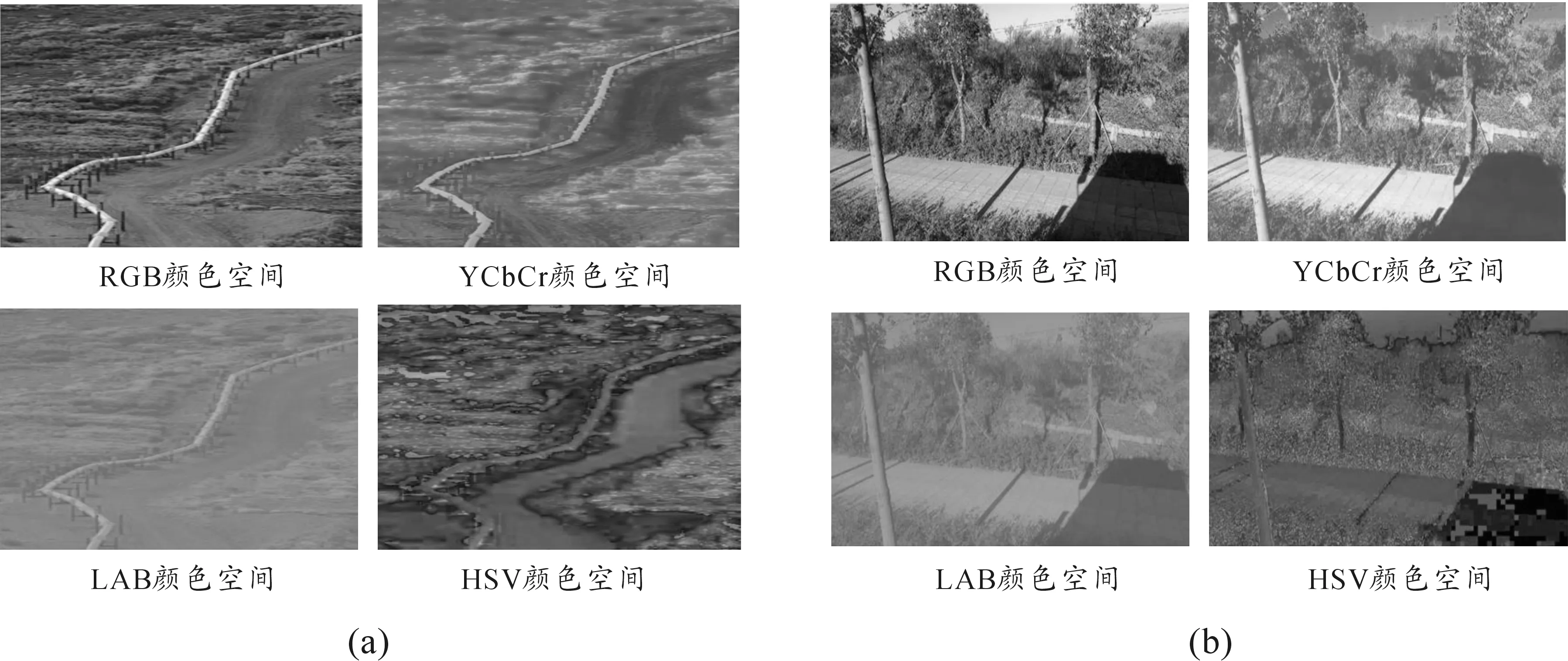
图2 4种颜色空间下的颜色显示
1) 欧氏距离
欧式距离是指对于一张图像,将前景中像素的值转化为该点到达最接近背景点的距离。该距离对图像中属性区别不敏感,对边缘清晰的图像分割效果好,计算式为
dk(euclid)=|X-μk|=
(1)
2) 马氏距离
马氏距离是多维空间中两点相似性的度量,具有不受量纲影响的特点,但它放大了细微变化的作用。受协方差矩阵不稳定的影响,马氏距离并不总是能顺利计算出,所以只适用于区域狭小的图像。假设均值μ=(μ1, μ2, …, μp),协方差矩阵是S,样本向量X=(x1,x2,…,xp)T,马氏距离可以由以下的公式定义
(2)
其中S为协方差矩阵为
(3)
图3为不同T值下聚类分割的二值图像。对于颜色区别较大的图像,如图3(a)所示的管线分割效果好,而图3(b)中与管线颜色相近的地面也在颜色聚类范围。

图3 颜色聚类分割二值图像
2.3 霍夫变换直线检测
对分割图像进行填色处理后,利用Canny算子进行边缘检测,边缘轮廓明显,噪声较小。最后,通过霍夫变换可以非常容易地将这些直线检测出来。霍夫变换就是利用点与线在直角坐标系下和极坐标系下的相互对应关系,将直角坐标系下的线转换为极坐标系下的点,通过图像扫描,利用计数器对极坐标系下的点累加,提取出代表峰值点作为目标直线,完成直线的检测,同时可以提取直线的端点坐标以及对应角度等相关信息。直线的极坐标方程为

(4)
式中:ρ表示极坐标系下原点到直线的距离;θ表示直线与x轴的夹角。
通过直角坐标到极坐标的坐标转换,直角坐标系下中的直线就可以对应极坐标系下的点,用ρ值和θ值来表示。霍夫变换就是根据这个原理,设置累加器H(ρ,θ);对直角坐标系下图像的每个像素点根据式(4)计算对应的(ρ,θ);利用计数器累加操作,提取出H(ρ,θ)的峰值坐标,从而获取检测直线的ρ和θ值。
若提取直线区域接近,近似重合,对应的ρ和θ值数值相近,即满足
(5)
式中: Tp, Tσ分别代表阈值。
可将近似值进行拟合处理:
(6)
实验管线直线提取图像如图4所示。
2.4 基于颜色与形状特征的管线目标识别算法流程
首先提取感兴趣区域ROI,计算ROI样本区域的颜色协方差矩阵C和均值m,进行样本的颜色聚类分割;然后,利用Canny算子对分割图像进行边缘检测,获得分割图像的区域轮廓,再进行直线霍夫变换检测图像中的直线,并进行直线拟合,提取出图像中最长直线段作为管线目标,并计算出直线中心点和端点坐标以及方位角,用矩形标记框标记,流程如图5所示。
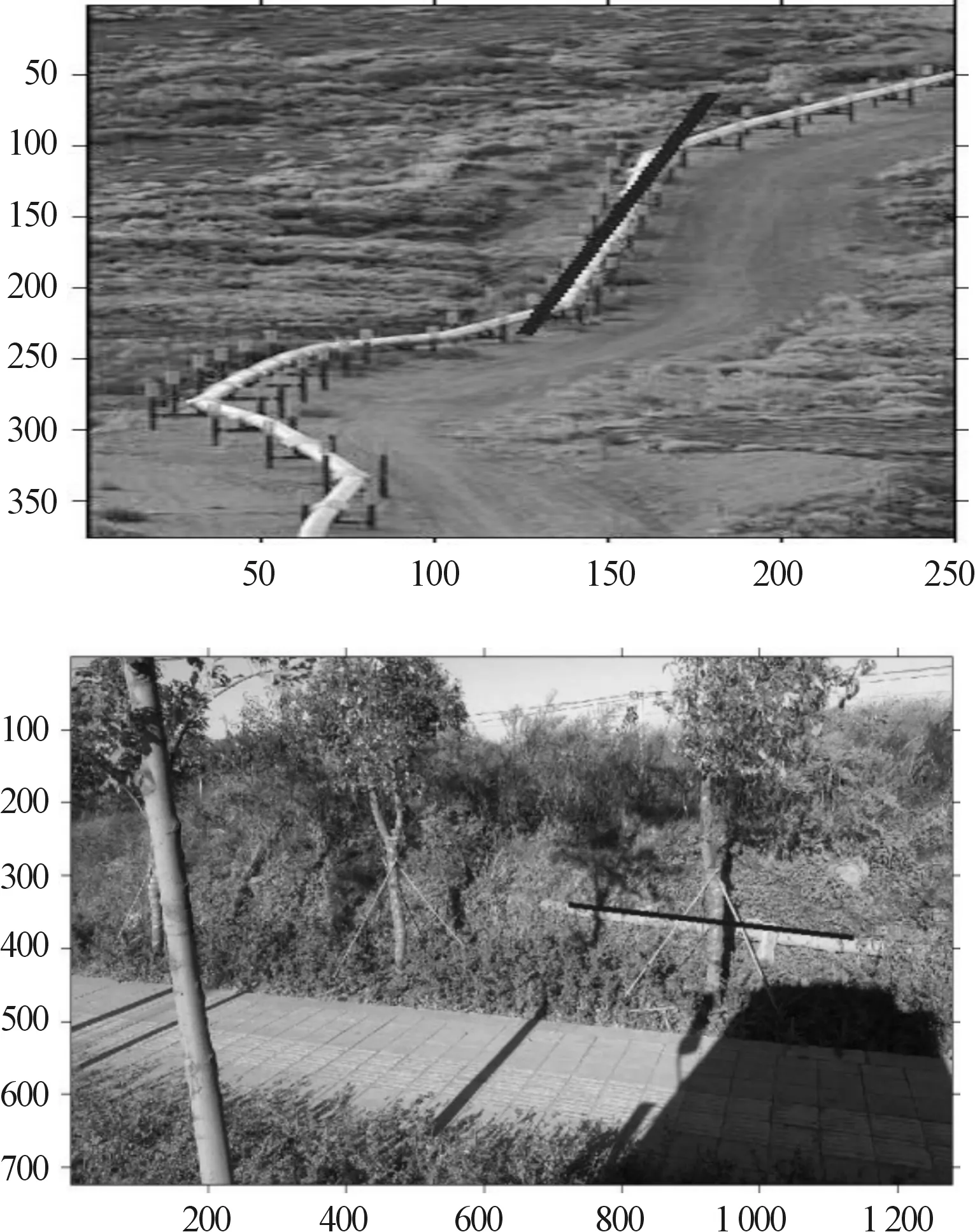
图4 霍夫变换直线峰值检测
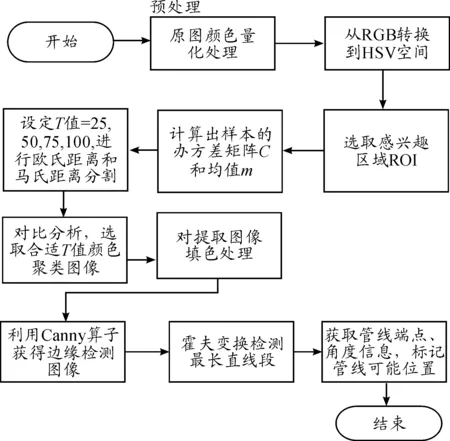
图5 管线目标的识别算法流程
3 实验结果分析
本文利用提出的方法在Matlab,Windows08平台编程仿真,测试图像库包含300幅图像,所有的图像均为JPG格式下1280×723的24位彩色图像,检测结果如图6所示。该方法能够较快检测出管线位置,通过测试图像发现,在管线与背景色彩差别较大的情况下,识别效果较好。在光线影响和背景色彩相似条件下,会产生检测偏差。图7因树干与管线形状颜色相似,将树木误识别为管线目标。
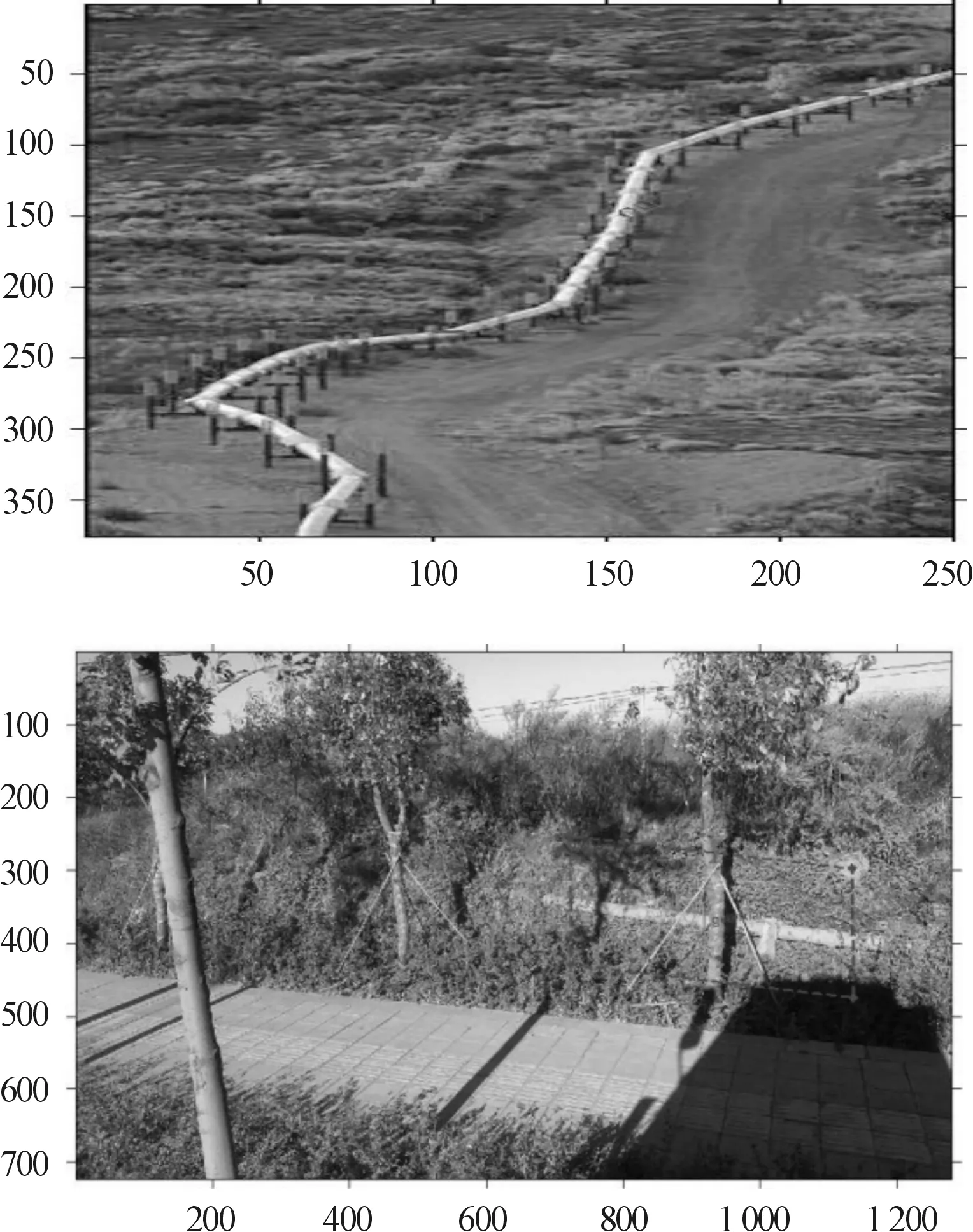
图6 管线识别效果

图7 误识别效果
4 结束语
本研究针对无人机巡线条件下的地面管线识别跟踪问题,提出了利用管线的颜色和形状特征进行管线目标的识别方法。本方法对管线目标特征进行了分析归类,相比单一依靠颜色、轮廓、纹理特征的目标检测方法具有更好的鲁棒性。测试图像库包含300幅图像,识别准确图像达到241张。实验表明,该方法在颜色区别较大的环境下识别效果良好,能够快速地对目标区域进行标定,为无人机进行跟踪巡线提供一种新的思路。对于动态图像中的管线目标,需对每一帧图像目标进行识别标定,从而实现动态跟踪。本文所研究的内容还是相对比较有限,对于管道巡线,还需要研究干扰更小的管线跟踪方法、故障检测方法、油气泄漏识别方法等。
[1] 常文见,孟凡辉,王仓,等.无人机遥感技术在长输管道中的应用探讨[J].价值工程,2013(32):197-198.
[2] 唐晏.基于无人机采集图像的植被识别方法研究[D].成都:成都理工大学,2014.
[3] 董鸿鹏,姜本清,方伟.面向雷达图像仿真的三维实体模型表示方法[J].兵器装备工程学报,2016(2):154-158.
[4] 郝平.基于机器视觉的快速动态检测研究与应用[J].兵器装备工程学报,2016(2):131-134.
[5] 桂振文,吴侹,彭欣.一种融合多传感器信息的移动图像识别方法[J].自动化学报,2015(8):1394-1404.
[6] 杨旭,赵径通,高升久.基于Harris算法的直线提取方法[J].电子技术与软件工程,2016(4):81-82.
[7] 张振杰,郝向阳,刘松林,等.基于Hough一维变换的直线检测算法[J].光学学报,2016(4):166-173.
[8] 曹建秋,王华清,蓝章礼.基于改进YCrCb颜色空间的肤色分割[J].重庆交通大学学报:自然科学版,2010(3):488-492.
[9] 高伟,王志衡,赵训坡,等.基于HSI颜色空间的棉花杂质高速实时检测方法[J].自动化学报,2008(7):729-735.
[10]虎晓红,李炳军,刘芳.多颜色空间中玉米叶部病害图像图论分割方法[J].农业机械学报,2013(2):177-181.
[11]唐羊洋,叶华平,吴书金,等.基于波段与形状特征的遥感影像建筑物分类提取[J].后勤工程学院学报,2016(1):93-96.
(责任编辑 杨继森)
Research on Recognition Method of Ground Oiland Gas Pipeline Based on UAV Patrol Line Image
YONG Qi-weia,YU Yan-jiab
(a. The Military Supply Department; b.Graduate Management School,Logistical Engineering University, Chongqing 401331, China)
Limited to the cost, the unmanned aerial vehicles are equipped with ordinary digital cameras for the main task, collecting the visible light image. In this paper, we proposed a method to identify oil and gas pipelines by color segmentation and shape detection. Firstly, we needed to set the ROI of the ROI, and calculated the covariance matrixCand meanm, and had image color cluster segmentation with Euclidean distance and Mahalanobis distance. Then, the edge detection was performed after that the image is segmented. Finally, the Hough transform is used to detect the line features according to the edge image to realize the automatic positioning of the pipe position in the complex environment. The test image bank contains 300 images, and the recognition accuracy is 80.3%. Experimental results show that the method based on color and shape features can effectively track and locate the pipeline in the background of large color difference.
gas pipeline; unmanned aerial vehicle inspection; color clustering segmentation; shape feature
2016-11-25;
2016-12-21 作者简介:雍歧卫(1967—),男,硕士,教授,主要从事石油与天然气研究。
10.11809/scbgxb2017.04.022
雍歧卫,喻言家.基于无人机巡线图像的地面油气管道识别方法[J].兵器装备工程学报,2017(4):100-104.
format:YONG Qi-wei,YU Yan-jia.Research on Recognition Method of Ground Oil and Gas Pipeline Based on UAV Patrol Line Image[J].Journal of Ordnance Equipment Engineering,2017(4):100-104.
TE832
A
2096-2304(2017)04-0100-05
