水下合成双射流流场特性与推力特性实验研究
2017-04-28罗振兵杨升科
彭 磊, 罗振兵, 邓 雄, 杨升科
(国防科学技术大学 航天科学与工程学院宇航系, 湖南 长沙 410073)
水下合成双射流流场特性与推力特性实验研究
彭 磊, 罗振兵*, 邓 雄, 杨升科
(国防科学技术大学 航天科学与工程学院宇航系, 湖南 长沙 410073)
为实现合成双射流技术在水下航行器上的应用,对水下合成双射流开展了流场特性和推力特性的实验研究,分析了水下合成双射流的平均流场特性和推力特性。实验得到了激励器出口不同位置处平均流场流向速度分布情况和水下合成双射流峰值推力随激励器驱动频率的变化规律,并研究了驱动电压幅值和波形对流场及推力的影响。实验发现:存在最佳频率使得水下合成双射流推力达到最大;驱动电压幅值越大,推力越大;不同波形的电压所产生的推力不同,矩形波所产生的推力相对正弦波和三角波所产生的推力更大。
水下;合成双射流;PIV;平均流场;推力
0 引 言
20世纪90年代中期起,以合成射流为主导的主动流动控制技术迅速成为流动控制的重要研究方向,合成射流技术被广泛地应用于不同的控制领域以实现不同的控制目的[1-6],这同时又决定了合成射流激励器的发展方向并促成了不同合成射流激励器类型的出现[7-10]。
如,随着我国的海洋权益争端日趋严峻,海洋开发也成为了一个新的热点问题,对于海洋开发者和海洋生态学家来说,水下航行器已经成为一种非常有用的工具,尤其是随着水下遥控航行器(ROV)和自主式水下航行器(AUV)的使用范围日益广泛需求日益增长,科学家们也越来越重视对水下航行器的研究。美国加州理工学院工程与应用科学部的Polsenberg-Thomas等[11]将合成射流用于小型水下航行器的推进,他们通过一台固定装置的振动来测量了射流的推力,并用一个简单的分析模型证明,合成射流可以以高于10 cm/s的速度对一个球形的水下航行器进行推进。美国科罗拉多大学航空航天工程研究所的Mohseni[12]所带领的研究小组在2008年将合成射流推进器安装在一个小型水下航行器上进行了研究,他们的研究发现,合成射流推进器具有结构简单,体积小,增加的额外阻力小等优点。而在这之前,美国加州理工大学古根汉姆航空实验室的Gharib[13]和德克萨斯州南卫理公会大学的Krueger[13]在对脉冲式射流进行的研究中证明,涡环结构产生于每个脉冲射流的初始阶段,而且在同等的平均质量流率和动量流率下,相比稳定的射流,脉冲射流可以产生更大的推力,它证明了利用脉冲射流来代替稳定射流的可行性。
2006年国防科技大学的罗振兵在合成射流激励器的基础上自主研发了一种新型的合成双射流激励器[14],此后学者们对合成双射流激励器的流场特性开展了大量的研究,包括数值模拟、实验等理论方面的研究以及其他应用方面的研究。合成双射流激励器具有构简单、体积小、质量轻、能量利用效率高等优良性能,将其运用到水下航行器的推进方面不仅能够充分发挥其具备的各项优良性能且不会影响水下航行器的良好流体外形,具有广阔的应用前景,有望成为一种新型的水下驱动和姿态控制助动器。为实现合成双射流激励器在水下航行器上的应用,本文对水下合成双射流的平均流场特性和推力特性进行了实验研究。
1 实验设备与测试系统
1.1 实验模型与设备
实验所采用的合成双射流激励器由两个出口和两个腔体共享一个振动膜构成。其工作原理是:振动膜在驱动电压作用下来回振动,压缩和膨胀左右两侧腔体内的流体,当振动膜处于向右侧振动过程时,右侧腔体内的流体经由其出口被挤压“喷”出,左侧出口周围流体被“吸”入激励器左侧腔体;当振动膜处于向左侧振动过程时,左侧腔体内的流体被挤压“喷”出,而同时右侧出口周围流体被“吸”入激励器右侧腔体内。在这种“喷”“吸”过程交替进行中,激励器左右出口分别有一股非定常射流l和射流2形成,这两股射流相位差为180°,射流l和射流2在向下游迁移过程中相互作用并融合成一股新的稳定的合成射流,直至最终耗散在流体环境中。
激励器样机如图1所示,图中坐标原点为两出口的中心对称点,X、Y、Z分别代表流向、横向和纵向。图2所为合成双射流内部结构示意图。激励器的结构参数如表1所示。
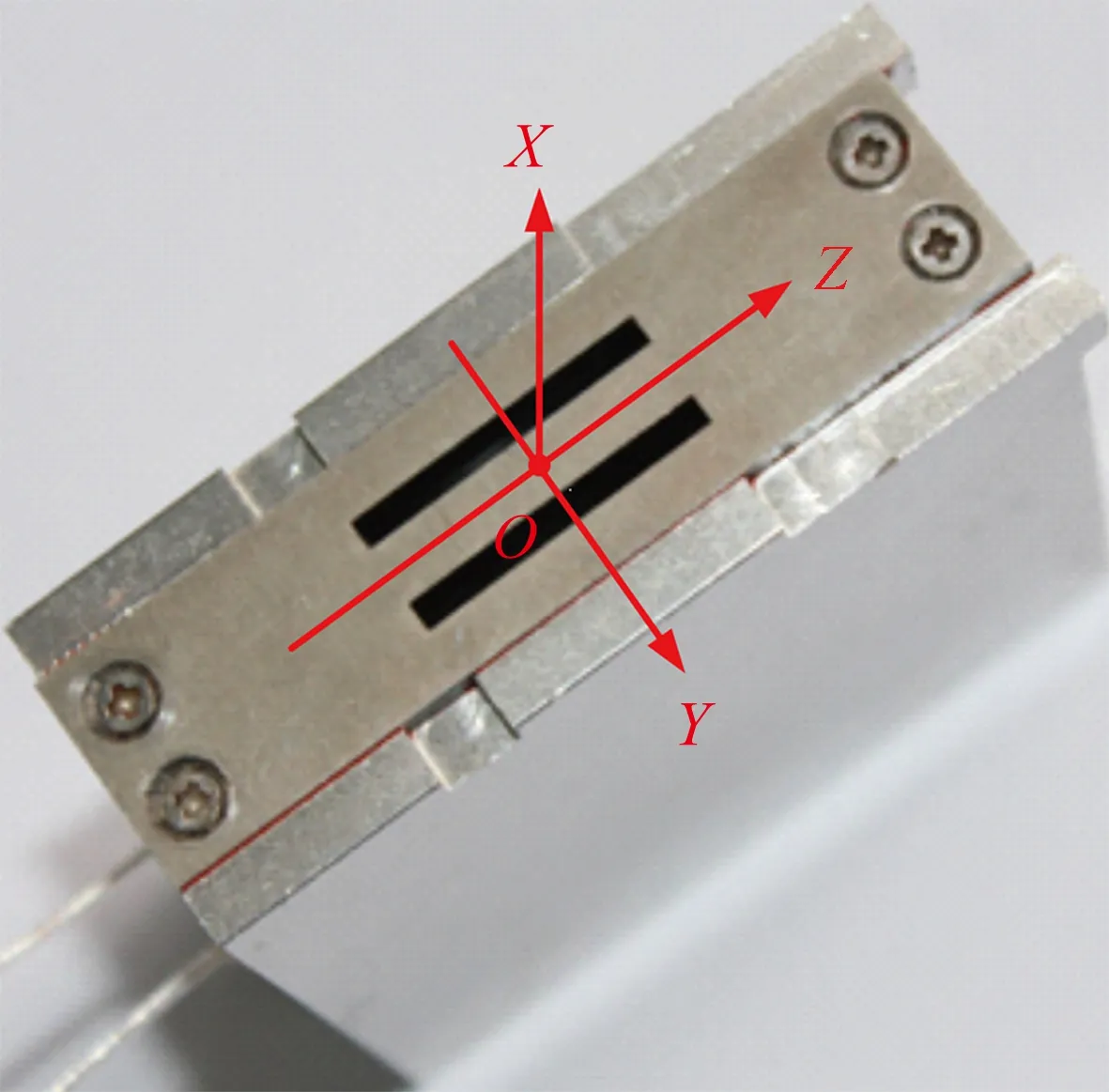
图1 合成双射流激励器实物图Fig.1 Picture of dual-synthetic jet actuator
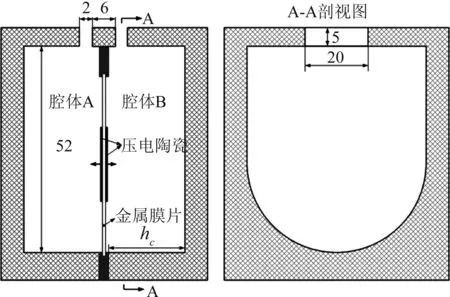
图2 合成双射流激励器内部结构示意图Fig.2 Internal structure diagram of DSJA

表1 水下合成双射流激励器结构参数(mm)Table 1 Structure parameter of underwater DSJA(unit: mm)
1.2 流场测试系统
本实验运用粒子图像测速仪(Particle Image Velocimetry,PIV)对水下合成双射流的各项特性及其影响因素进行研究。PIV系统主要由5部分构成:光源系统、同步控制器、跨帧相机、图像采集卡和系统软件。图3为PIV 统组成和测速原理示意图。
1.3 推力测试系统
推力测试系统主要由压力传感器和多功能智能五位显示控制仪组成。压力传感器采用的是JLBS-M型微小拉压力传感器,属于压阻式应变传感器,该传感器采用箔式应变片贴在合金钢弹性体上,能够承受拉、压力,具有测量精度高、稳定性能好、温度漂移小、输出对称性好、结构紧凑,适用于空间有限的场合,进行该实验前将此传感器进行防水处理。将传感器固定在激励器与底座之间,传感器与激励器之间的连接方式如图4所示。

图3 PIV 系统组成和测速原理示意图Fig.3 Picture of system and speed-measuring principle
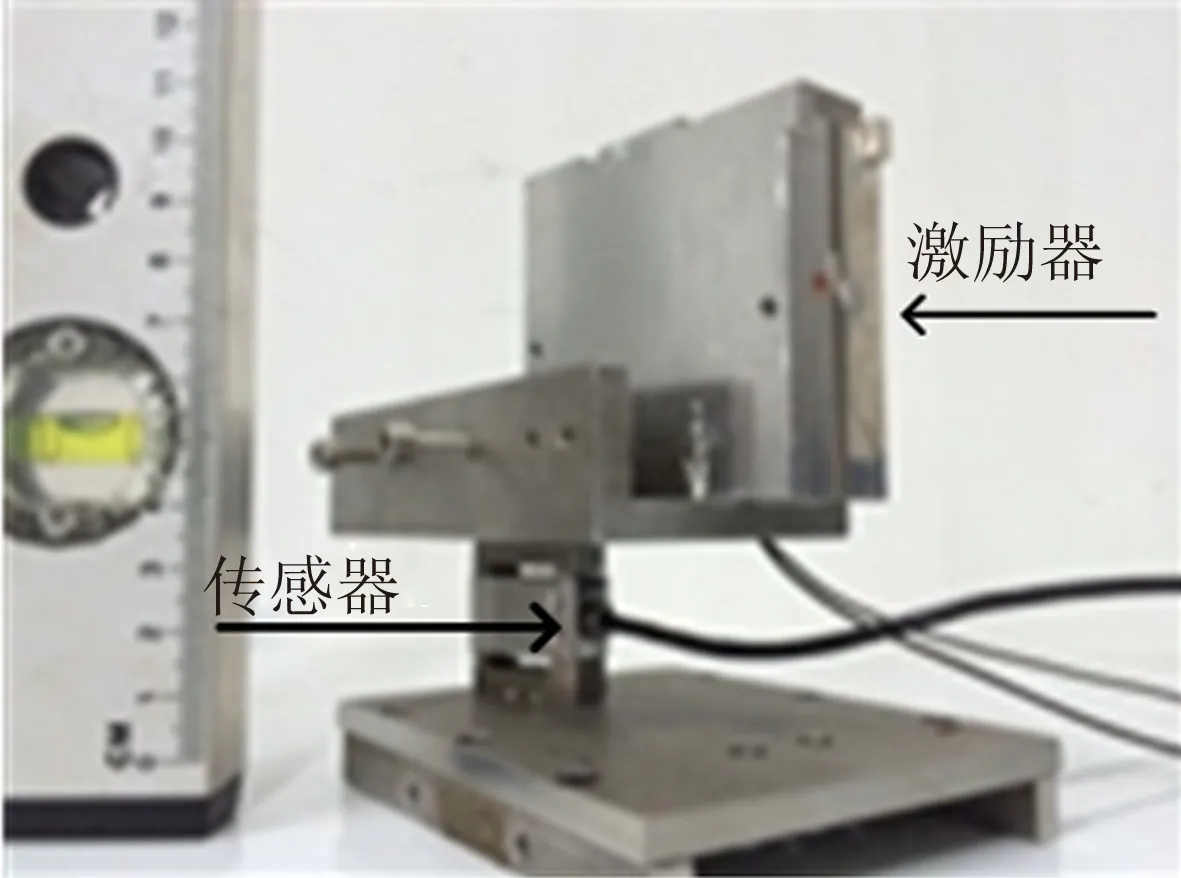
图4 压力传感器与激励器连接示意图Fig.4 Connection diagram of pressure sensor and DSJA
智能五位显示控制仪选用的是MCK-Z-I高精度智能显示仪,其外形尺寸为160 mm×80 mm×125 mm,该仪表功能齐全,可接收4-20MA/0-5V/0-10V信号,也可发送4-20MA/0-5V/0-10V信号,最多可选四路继电器,而且常开常闭可选,实物如图5所示。
图5 多功能智能显示控制仪Fig.5 Picture of multi-functional intelligent display control device
2 水下合成双射流平均流场特性
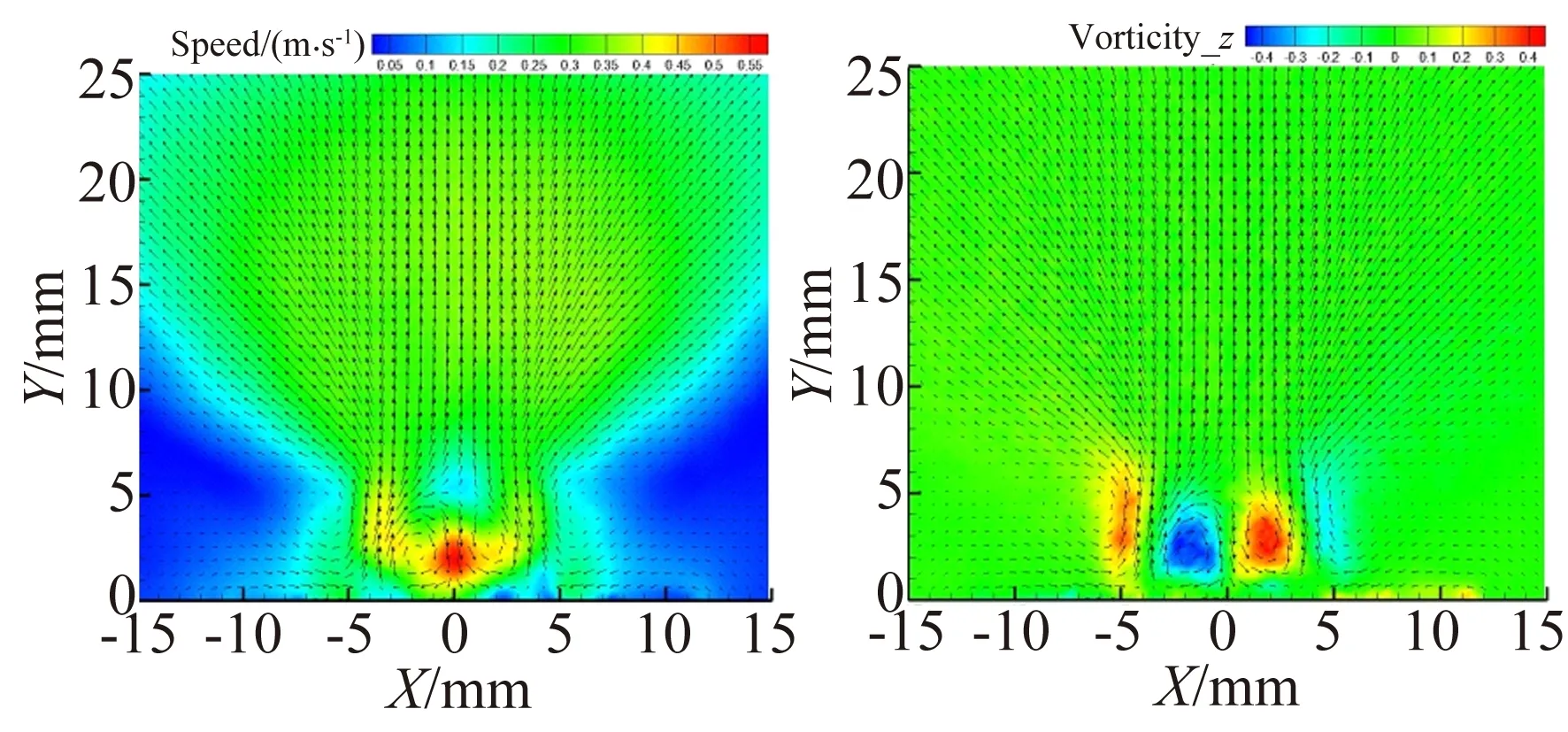
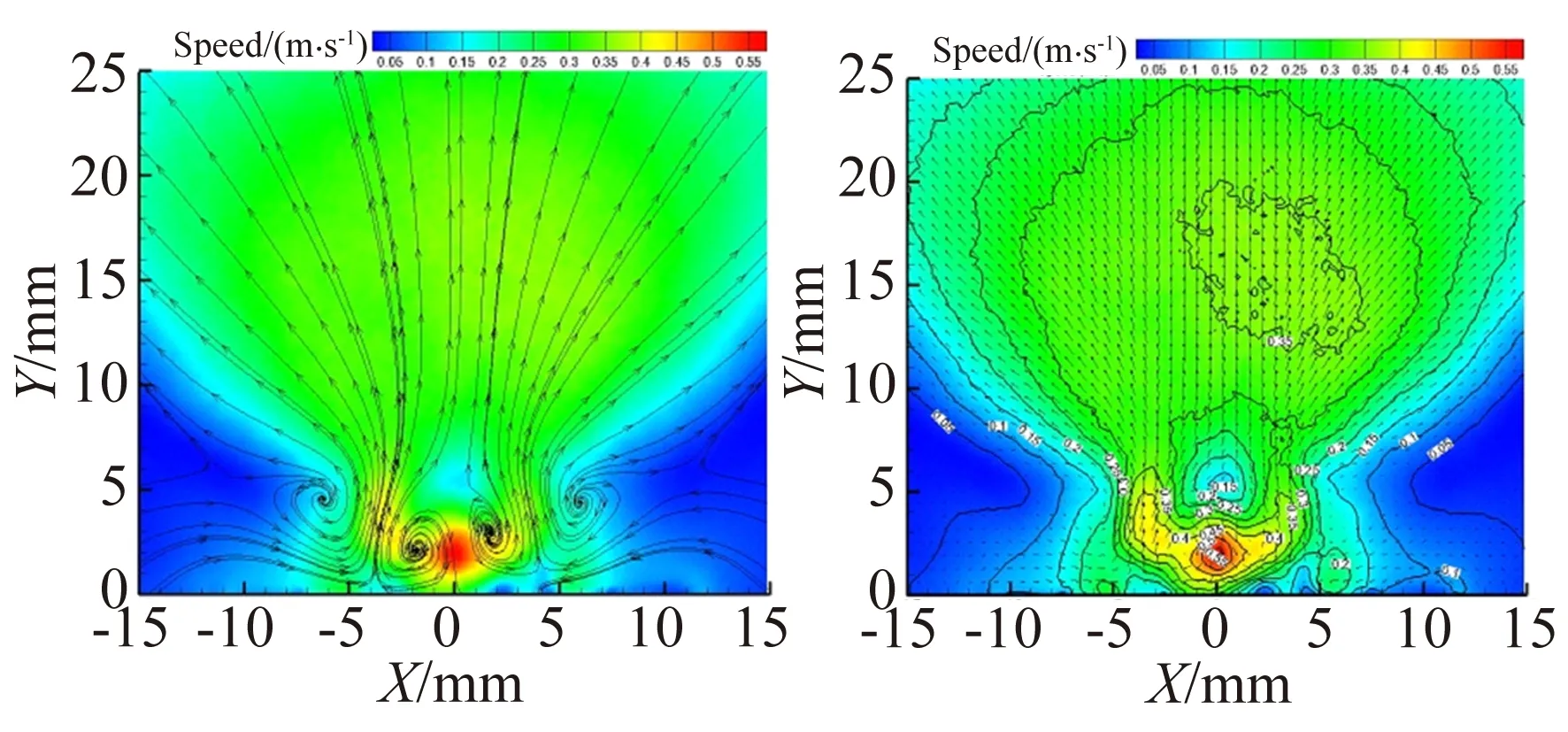
图6是水下合成双射流在一个周期当中12个相位的平均值。由图示的平均流场可以看出,虽然水下合成双射流在各个不同相位时由于左右出口的流动状态相反导致局部流场十分复杂,但经过相位平均计算之后,平均流场在宏观上却具有相当好的对称性,对称轴正好是激励器两出口之间的中心线,这也正反映了激励器在结构上的对称性以及振动膜左右振动的对称性。在激励器中心线即Y轴上Y=5 mm处附近,存在一个“鞍点”,鞍点是流体流向发生改变的位置。
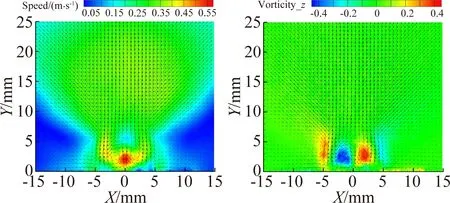
(a) 速度矢量云图 (b) 涡量云图

(c) 流线图 (d) 速度等值线云图
图6 水下合成双射流一个周期中的平均值
Fig.6 Time-average flowfields of underwater DSJA
图7是Y=10 mm范围内不同位置处流向速度的分布特性,由图可知,流向速度在射流稳定前波动显著,且在距离出口较近的范围内(Y=4 mm以下),观察曲线A、B、C可以发现,流向速度不仅波动大且出现负值,说明接近出口位置的流体受出口流动状态的影响较大且会向腔体内部回流,而曲线D、E没有出现负值,说明在Y=6 mm范围以后,流体不会发生回流,这与前面通过直观分析平均流场云图认为“鞍点”在Y=5 mm附近的结论相一致。观察曲线C、D、E可以发现,随着离出口距离的增大,流向速度的波动越来越小,且波峰的峰值也逐渐减小,说明射流在逐渐趋于稳定,且存在一定的耗散。
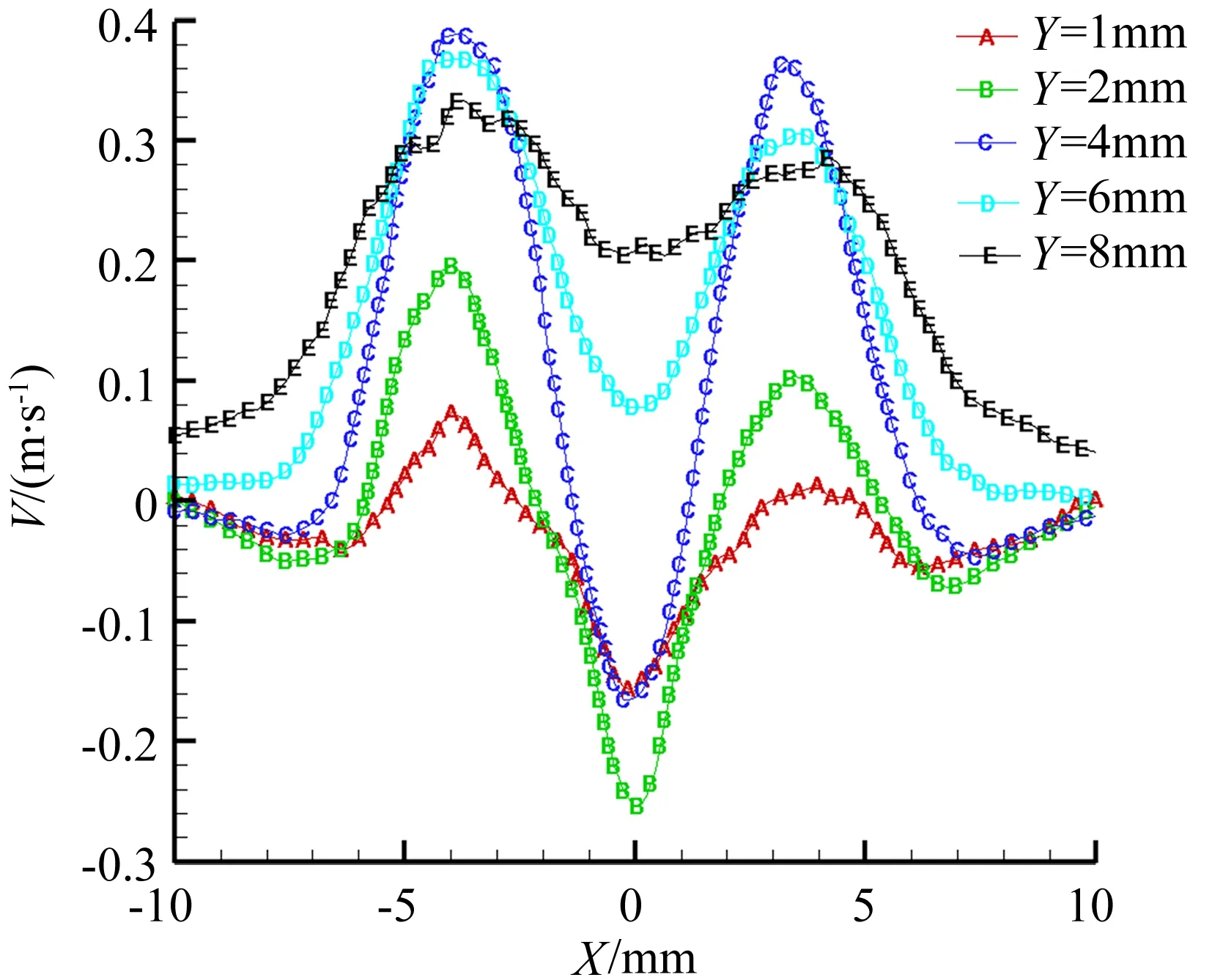
图7 不同位置处流向速度的分布Fig.7 Distribution of speed in different positions
3 电压参数对水下合成双射流流场影响研究
3.1 电压频率对水下合成双射流流场的影响
实验时保持驱动电压幅值、波形和激励器参数不变,通过改变驱动电压的频率,使之分别为25 Hz、30 Hz、35 Hz来研究驱动电压的频率对水下合成双射流流场的影响,重点关注对水下合成双射流平均流场的影响。实验参数如表2所示。
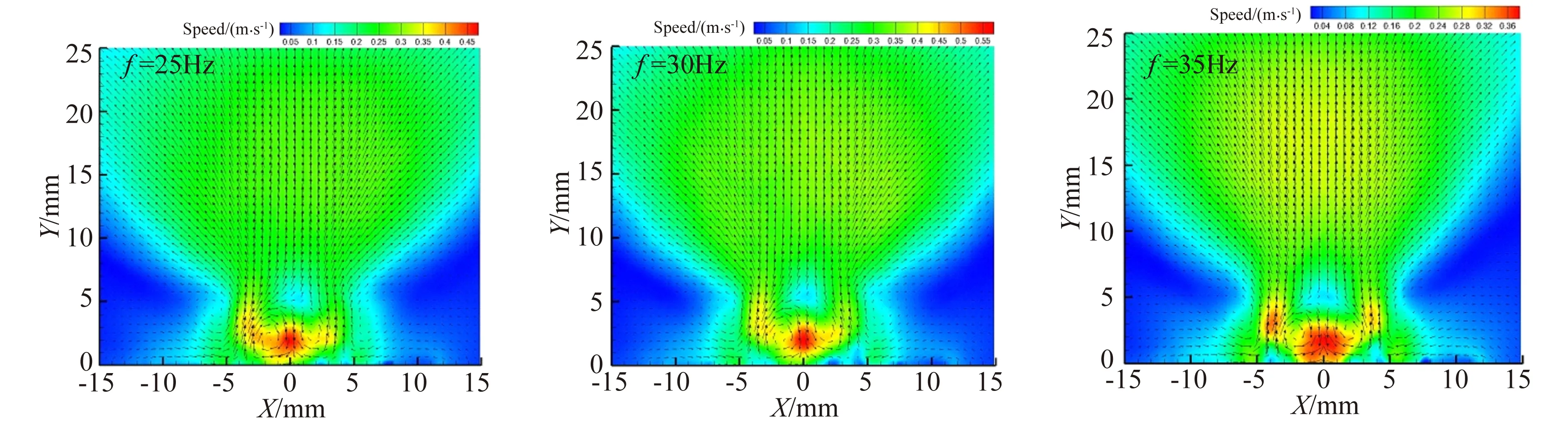
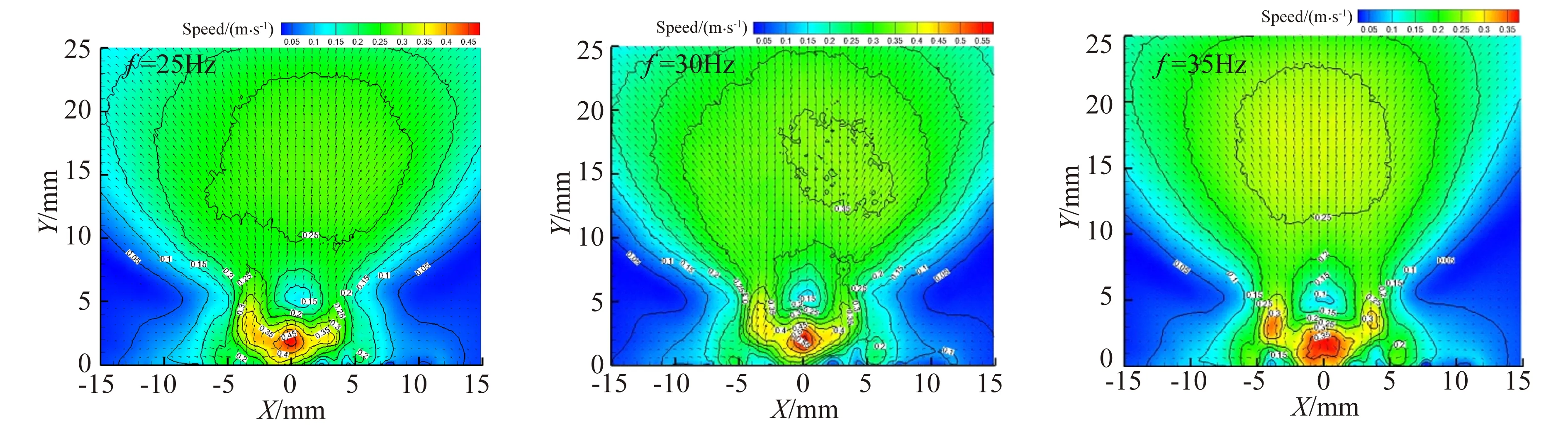
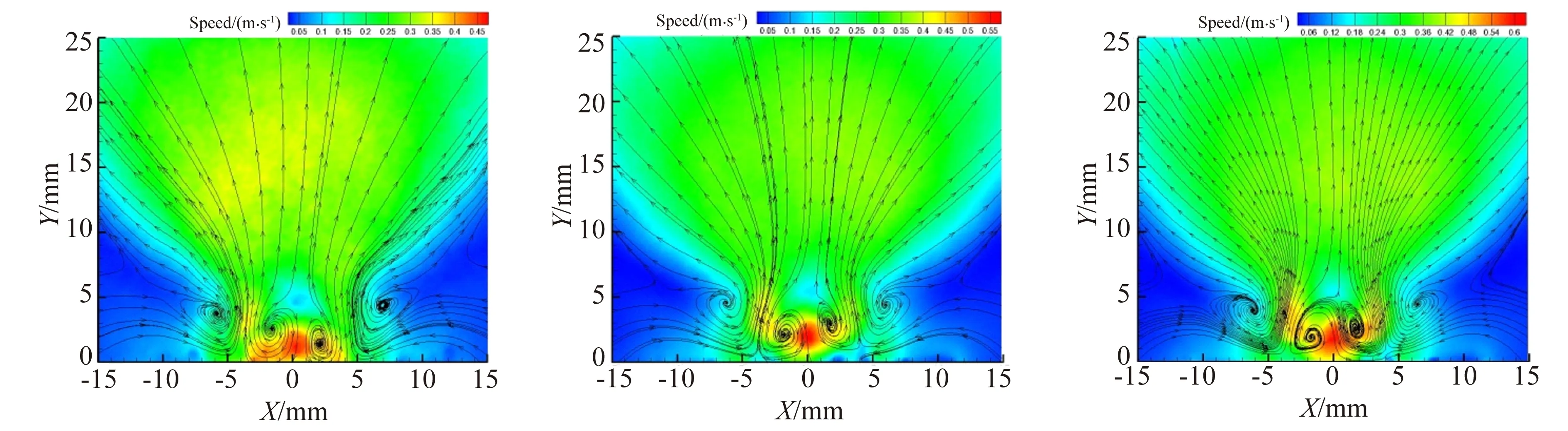
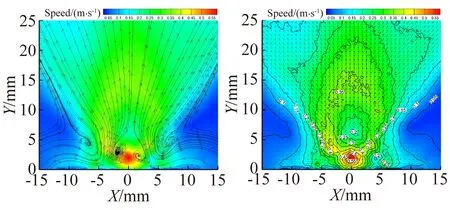
图8是PIV实验得到的三种不同频率电压驱动下水下合成双射流平均流场的速度矢量云图、涡量云图、流线图和速度等值线云图,驱动频率从左至右依次是25 Hz、30 Hz、35 Hz。横向对比不同驱动频率下的流场云图可以发现,电压频率对水下合成双射流平均流场的流场结构影响并不大,流场的对称性、流动“鞍点”的位置、流线的走向、等值线的分布没有显著变化。但通过观察速度矢量云图和涡量云图的标尺刻度可以发现,三种频率下的流动强度是不一样的,25 Hz时平均流场的最大速度为0.45 m/s,30 Hz时平均流场最大速度增大到0.55 m/s,而35 Hz时最大速度降为0.35 m/s,标尺所显示的涡量范围也呈现上述先增大后减小的变化规律,下面对流场的流动状态进行定量分析。
表2 不同频率条件下的实验参数Table 2 Experiment parameters in different driving frequencies
(a) 速度矢量云图
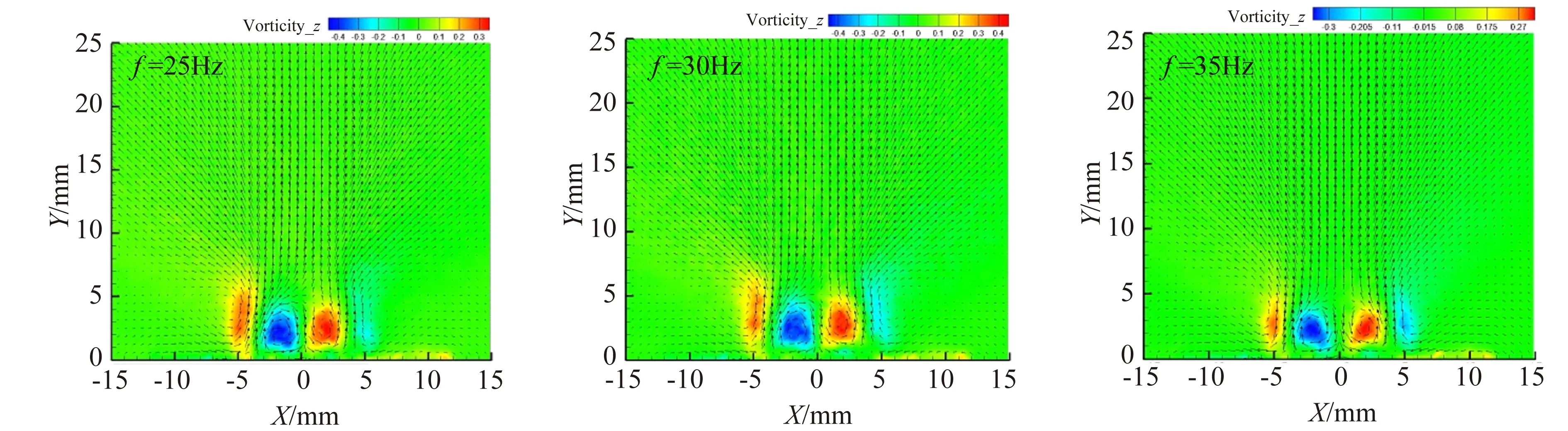
(b) 涡量云图
(c) 流线图
(d) 速度等值线云图
图9是三种频率电压驱动下水下合成双射流平均流场中激励器两出口中心线,即流场云图中Y轴上的流向速度分布,在射流稳定前(Y<10 mm)三条曲线基本重合,说明在此区域频率对中心线的流向速度分布没有显著影响,但当射流稳定后(Y>10 mm),30 Hz电压驱动下产生的流向速度明显大于25 Hz和35 Hz电压驱动下产生的流向速度,25 Hz和35 Hz的曲线基本重合。
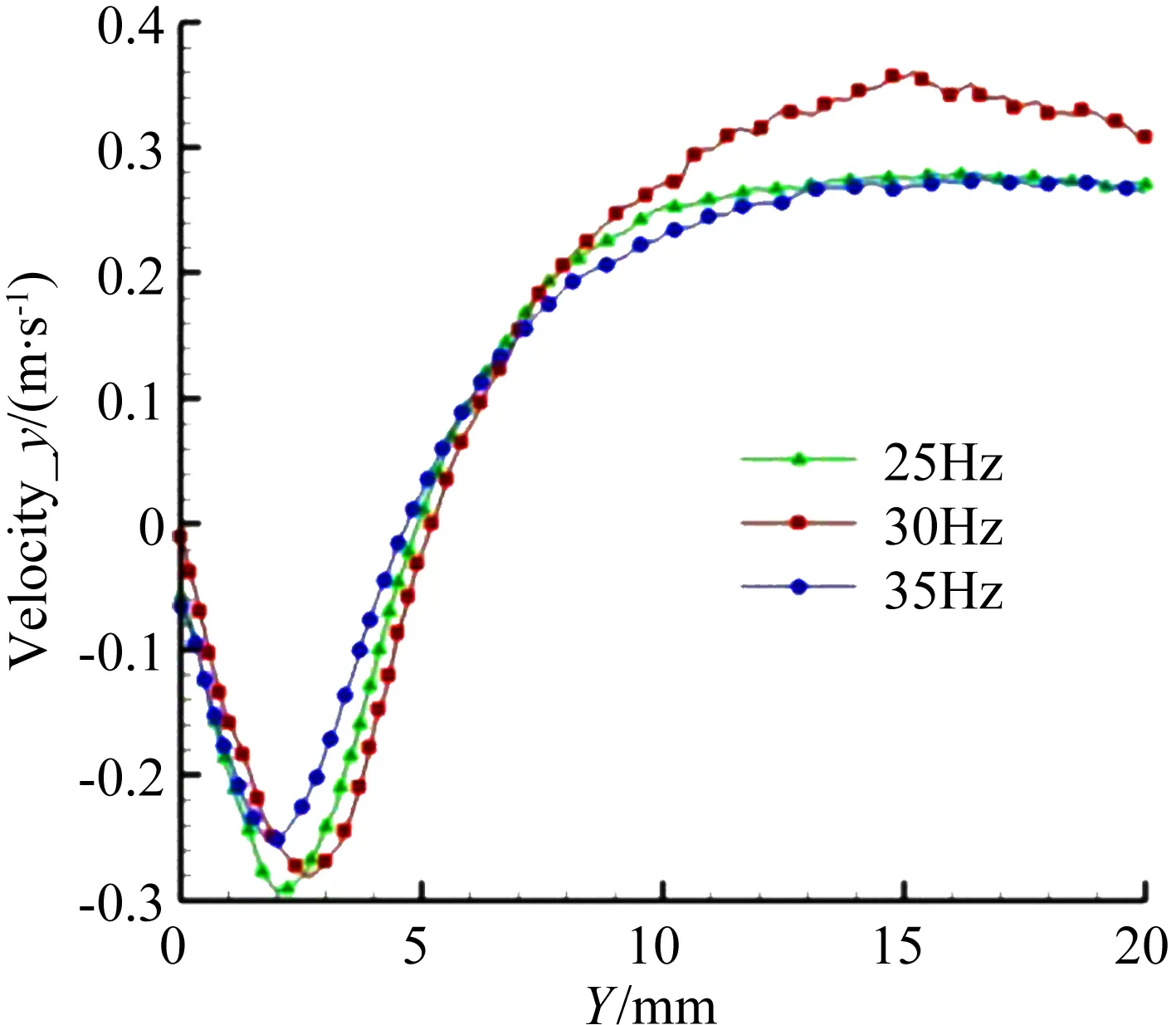
图9 三种频率电压驱动下水下合成双射流平均流场中激励器两出口中心线的流向速度分布Fig.9 Streamwise velocity distribution in the central line of DSJA time-average flow fields under three driving frequencies
以上分析说明,频率的改变会使水下合成双射流强度发生明显改变,且存在最佳驱动频率使得射流强度达到最大,进行多组实验对比可得,对于该实验所采用的水下合成双射流激励器,最佳工作频率在30 Hz左右,这是因为在驱动频率为30 Hz时,水下合成双射流激励器产生了共振现象,此时射流的强度达到最大。早期的研究表明,合成双射流激励器在空气中的共振频率为300 Hz左右,激励器在水下的共振频率明显小于空气中的共振频率,这主要是由于水的密度大于空气密度造成的。
3.2 电压幅值对水下合成双射流流场的影响
实验时保持驱动电压频率、波形和激励器参数不变,通过改变驱动电压的幅值,使之分别为220 V、250 V、280 V来研究驱动电压的幅值对水下合成双射流流场的影响,重点关注对水下合成双射流的平均流场。实验参数如表3所示。
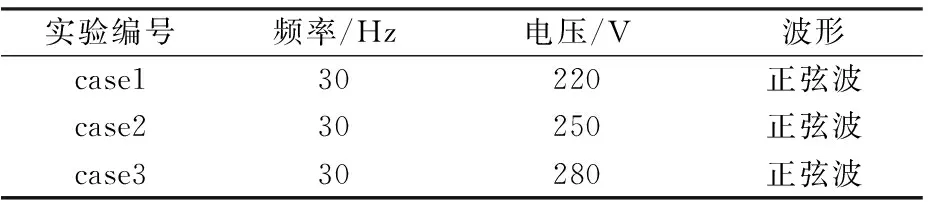
表3 不同幅值条件下的实验参数Table 3 Experiment parameters in different driving amplitudes
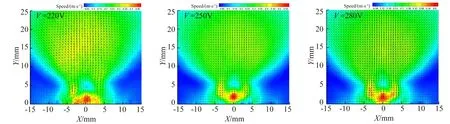
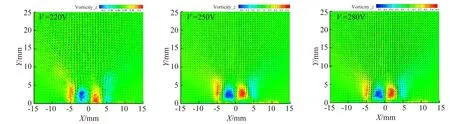
图10是实验得到的三种不同幅值电压驱动下水下合成双射流平均流场的速度矢量云图、涡量云图、流线图和速度等值线云图,从左至右依次是220 V、250 V、280 V。
观察速度矢量云图和涡量云图的标尺刻度可以发现,电压幅值对平均射流的强度具有显著影响,220 V时平均流场的最大速度为0.45 m/s左右,250 V时平均流场最大速度增大到0.55 m/s左右,而280时最大速度上升到0.6 m/s左右,标尺所显示的涡量范围也呈现上述逐渐增大的变化规律。
图11是三种不同幅值的电压驱动下水下合成双射流平均流场中Y轴上的流向速度分布,可以看到,随着电压幅值的增大,流向速度也随之显著增大,在射流稳定后,220 V电压产生的平均射流速度为0.25 m/s左右,250 V时为0.32 m/s左右,280 V时射流平均速度上升到0.38 m/s左右。
3.3 电压波形对水下合成双射流流场的影响
实验时保持激励电压幅值、频率以及激励器参数不变,通过改变激励电压的波形,使之分别为正弦波、矩形波、对称三角波来研究激励电压对水下合成双射流流场的影响,重点关注对水下合成双射流平均流场的影响。实验参数如表4所示。
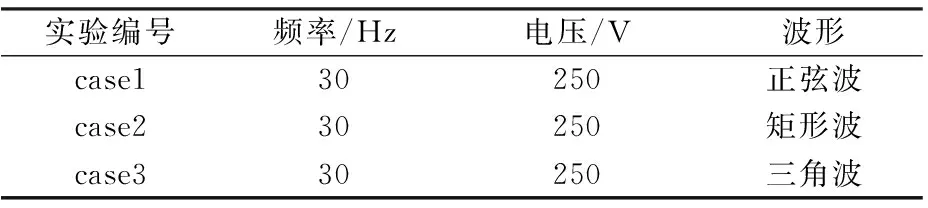
表4 不同波形条件下的实验参数Table 4 Experiment parameters in different driving waveforms
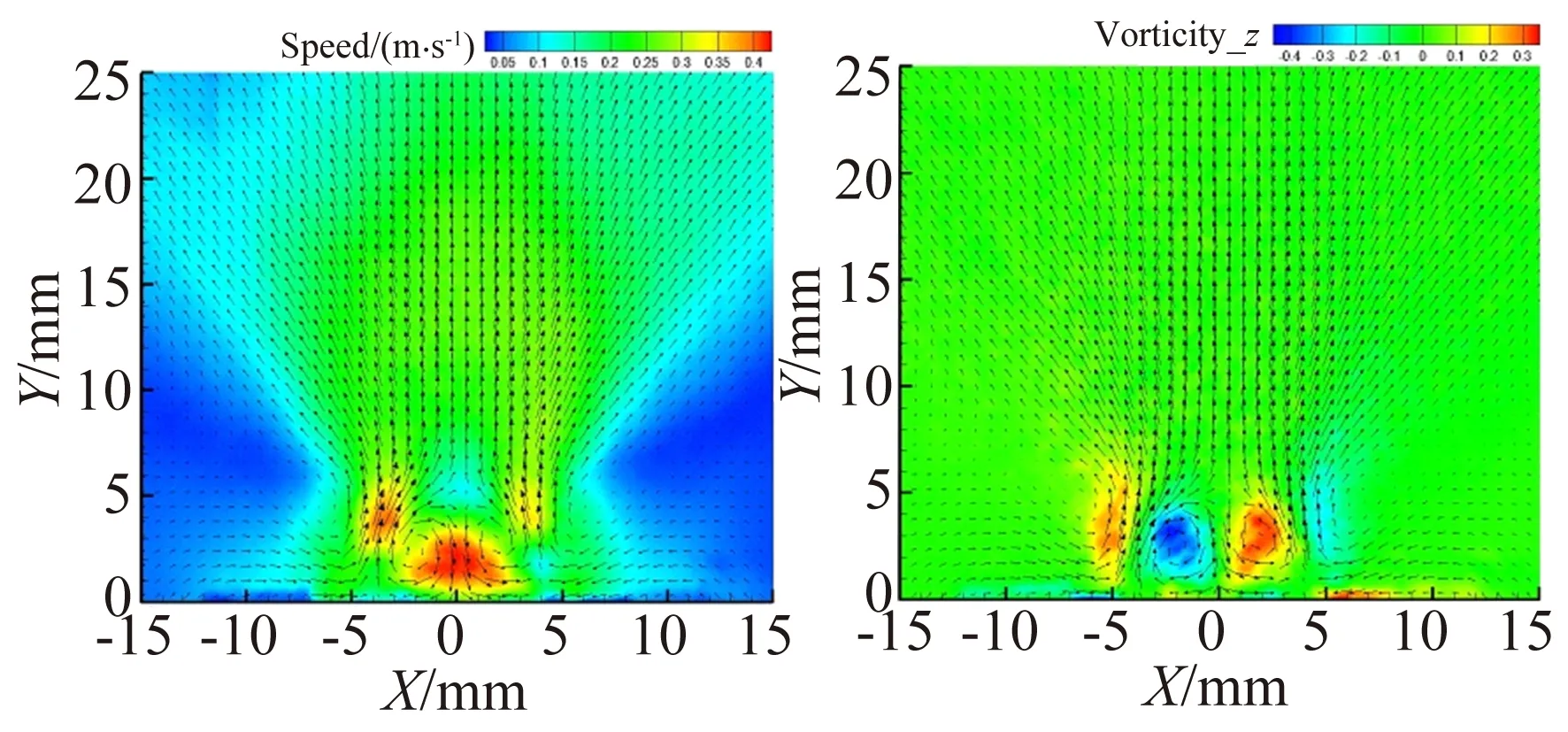
图12~图14分别是是PIV实验后得到的三种不同波形下水下合成双射流平均流场的速度矢量云图、涡量云图、流线图和速度等值线云图,通过对比不同波形下的云图可以发现,电压波形对水下合成双射流平均流场的流场结构有显著影响,正弦波驱动下产生的平均射流扩散角更大,流场速度等值线形状也更加圆滑“饱满”,矩形波和三角波驱动下产生的平均流场速度等值线更加“扁平”,不规则性更强。但三种波形下的平均流场依然保持着较好的对称性,流动“鞍点”的位置、流线的走向基本都没有显著变化,这与三种波形具有对称性且频率和幅值都相同有着必然关系。但通过观察速度矢量云图和涡量云图的标尺刻度可以发现,正弦波和矩形波激励下平均流场最大速度为0.55 m/s,而三角波激励下的平均流场最大速度为0.4 m/s,前者涡量场的标尺范围也更宽,说明三角波会导致水下合成双射流的射流强度明显变低,之后将从流场中提取数据进行定量说明。
(a) 速度矢量云图
(b) 涡量云图
(c) 流线图
(d) 速度等值线云图
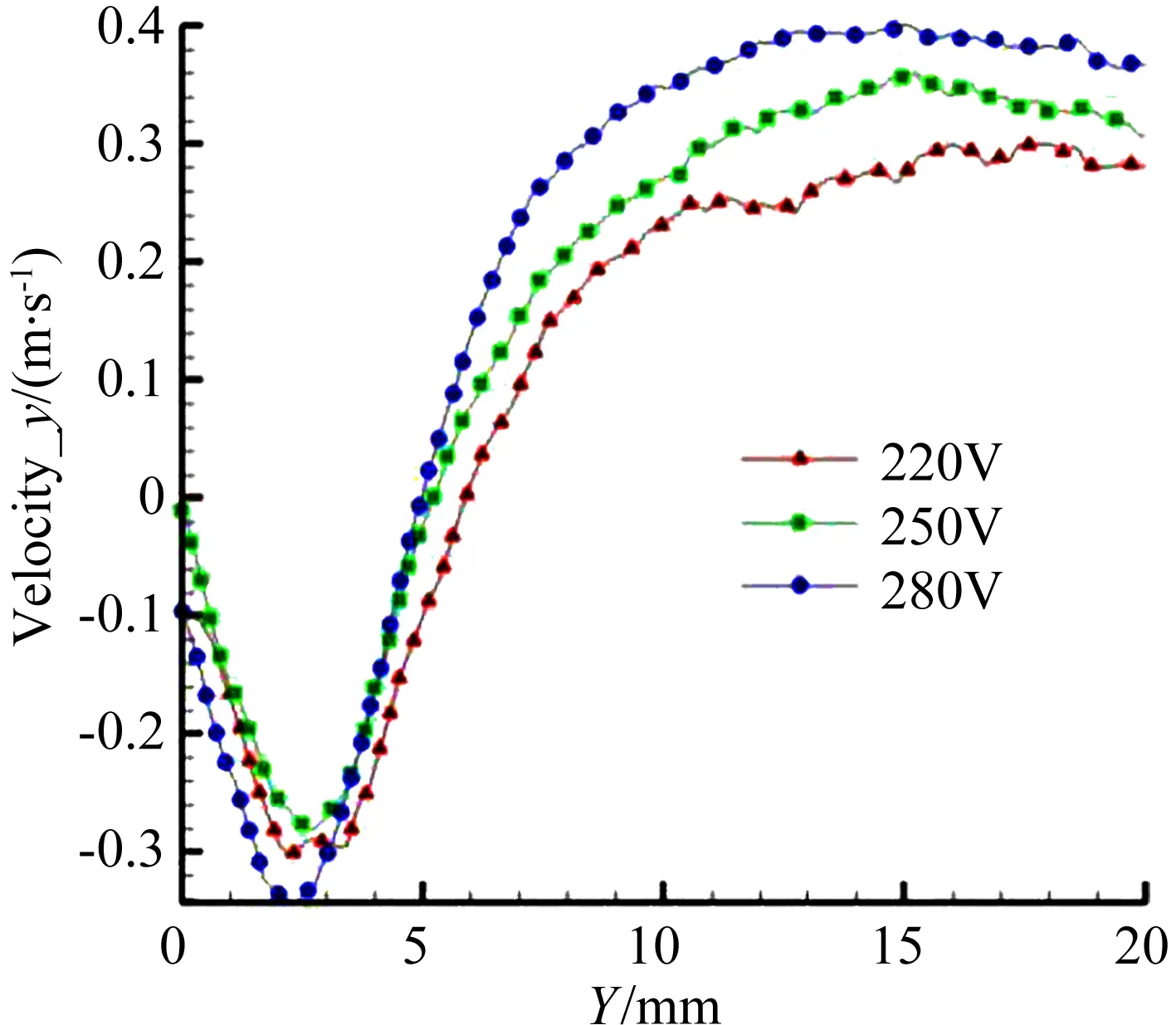
图11 三种不同幅值的电压驱动下水下合成双射流平均流场中Y轴上的流向速度分布Fig.11 Streamwise velocity distribution in the Y-axis of DSJA time-average flow fields under three drivingamplitudes
(a) 速度矢量云图 (b) 涡量云图
(c) 流线图速度 (d) 等值线云图
图12 正弦的波水下合成双射流平均流场云图
Fig.12 Counters of time-average flow fields of underwater DSJA in Sine-wave

(a) 速度矢量云图 (b) 涡量云图
(c) 流线图速度 (d) 等值线云图
图13 方波的水下合成双射流平均流场云图
Fig.13 Contours of time-average flow fields of underwater DSJA in square wae
(a) 速度矢量云图 (b) 涡量云图
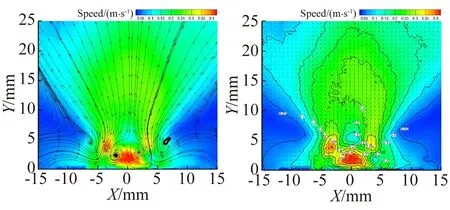
(c) 流线图速度 (d) 等值线云图
图14 三角波的水下合成双射流平均流场云图
Fig.14 Contours of time-average flow fields of underwater DSJA in triangular wave
图15为三种波形激励下平均流场中激励器两出口中心线上的流向速度分布图,在射流稳定前(Y<10 mm)三条曲线基本重合,说明在此区域波形对中心线的流向速度分布没有影响,但当射流稳定后(Y>10 mm),三角波激励下的流向速度明显小于正弦波和矩形波激励下的流向速度,而正弦波和矩形波产生的流向速度分布基本一致,矩形波所产生的射流速度稍微偏大。文献[15]中对三种波形下激励器的功率变化特性研究表明,在相同的条件下,方波对应平均功率最大,三角波的平均功率最小,所以在相同的电压和频率下,矩形波产生的射流速度最大。
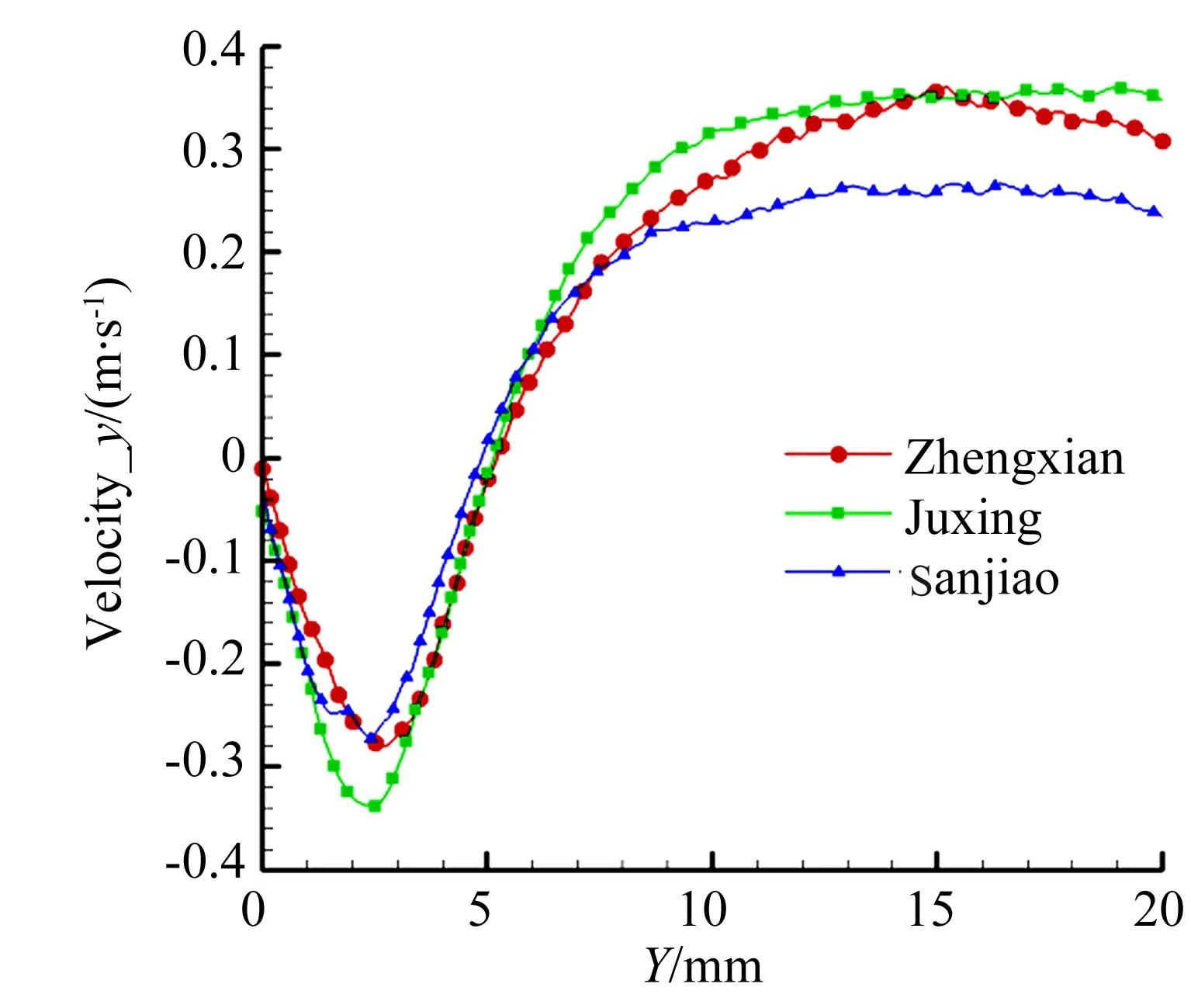
图15 三种不同波形的电压驱动下水下合成双射流平均流场中Y轴上的流向速度分布Fig.15 Streamwise velocity distribution in the Y-axis of DSJA time-average flow fields under three driving waveforms
4 水下合成双射流推力特性
4.1 电压频率对推力的影响
实验前将各设备连接完整,激励器置于水缸中,然后向水缸中注水到一定深度。通过示波器观测经由信号放大器放大后的驱动信号,调节信号发生器使最终输出的信号为250 V的正弦波,初始频率设置为10 Hz,开始实验后逐渐增大频率,并记录每一个频率下智能显示仪所显示的最大压力,即水下合成双射流的推力。将实验结果制成折线图并分析水下合成双射流的推力随激励器驱动频率的变化规律。250 V正弦波驱动下的水下合成双射流的推力性能如图16所示。
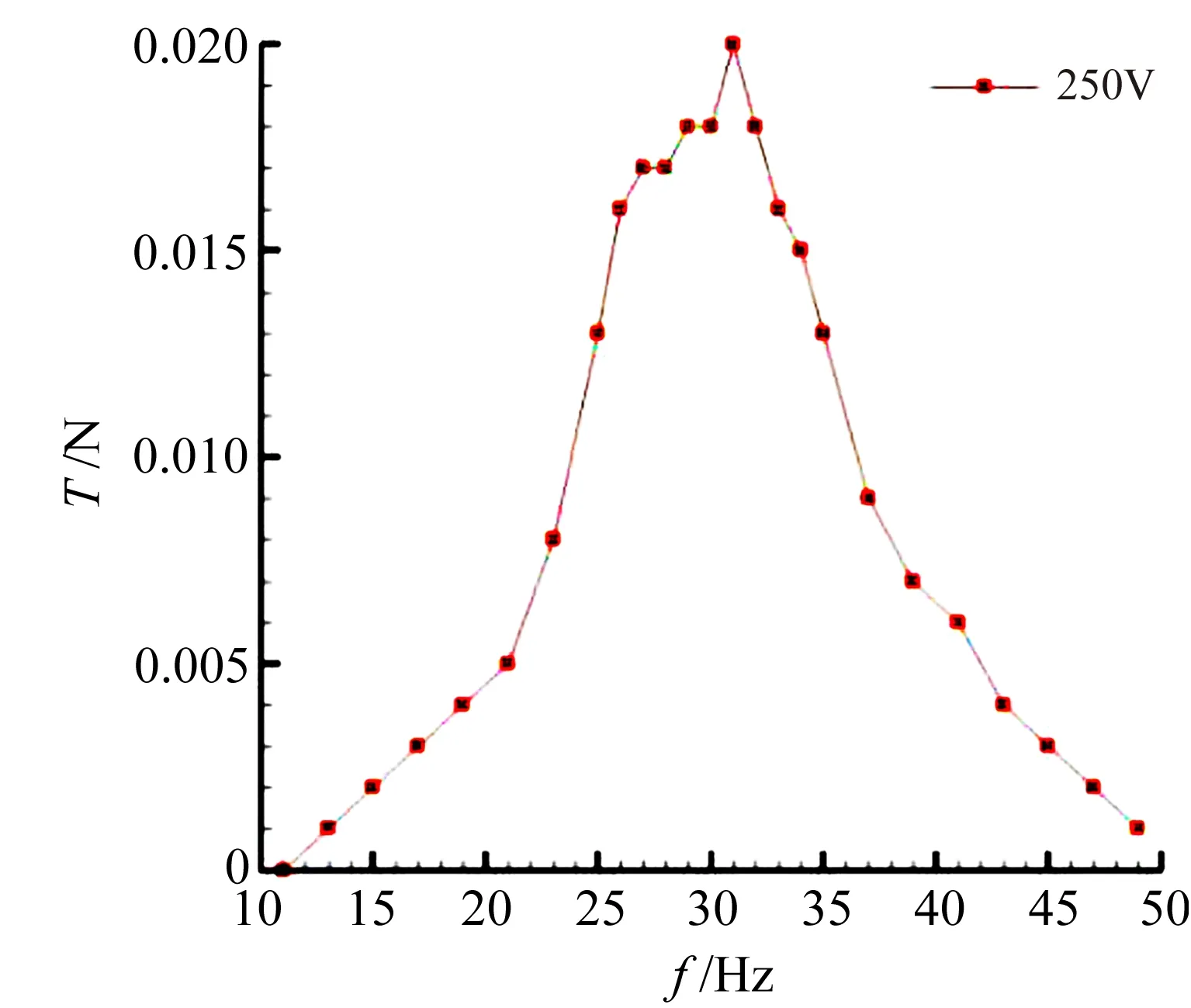
图16 250 V正弦波驱动下水下合成双射流推力性能Fig.16 Propulsion performance of underwater DSJA in 250 V sine-wave driving voltage
由折线图可以看出,驱动电压所产生的水下合成双射流的推力随着频率的增大呈现先增大后减小的变化趋势,且在31 Hz时达到最大值为0.02 N,曲线整体呈现为单峰状且波峰处于30~33 Hz左右,越接近最佳频率,其推力增加地越快,当频率偏离最佳频率较远后,即频率低于10 Hz或者大于50 Hz后,推力几乎为零。产生这种现象的原因是,相对激励器腔体尺寸和介质特性,振动膜的共振频率在30~33 Hz左右,在此频率附近,振动膜的振动最为剧烈振幅达到最大,射流的强度也达到最大从而导致推力在振动膜的共振频率处达到最大;当驱动频率偏离共振频率后,振动膜的振动幅值迅速减小,射流的强度也随之减小,推力也相应地减小。
4.2 电压幅值对推力的影响
保持电压波形和激励器参数不变,分别在220 V、250 V、280 V的电压幅值下测量水下合成双射流的推力随频率的变化规律。不同电压幅值下推力随频率的变化规律如图17所示,由折线图的变化规律可知,频率相同时,水下合成双射流的推力随着驱动电压幅值的增加而增加,且电压幅值的变化不影响推力的频率变化特性,不同幅值下的变化曲线依然呈单峰状,且波峰在30 Hz左右。这是因为驱动电压的幅值越大,振动膜的振幅越大,射流强度越大推力也越大。
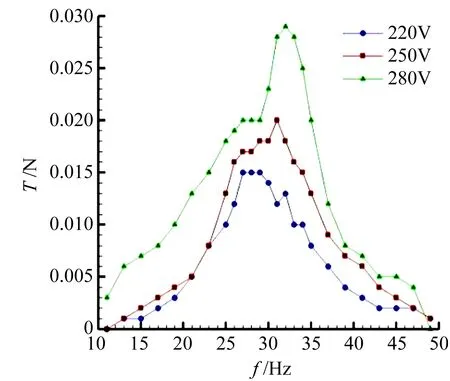
图17 不同电压幅值下推力随频率的变化Fig.17 Curves of the thrust with changing frequencies under different driving voltages
4.3 电压波形对推力的影响
保持电压幅值为250 V和激励器参数不变,分别在正弦波、矩形波、三角波三种不同的波形下测量水下合成双射流推力随频率的变化规律。不同波形的电压驱动下推力随频率的变化规律如图18所示,由折线图的变化规律可知,在相同频率下,矩形波驱动所产生的推力比其余两种波形产生的推力大;三角波驱动所产生的推力在25 Hz以前比正弦波驱动所产生的推力大,在25 Hz以后比正弦波驱动所产生的推力小。原因是在相同的电压幅值和频率下,方波的输入功率更大,因此其产生的射流强度和推力也相应地比其他两种波形所产生的射流强度和推力要大。同样地,电压波形的变化并不影响推力的频率变化特性,不同波形下的变化曲线依然呈现单峰状,且波峰在30 Hz左右。
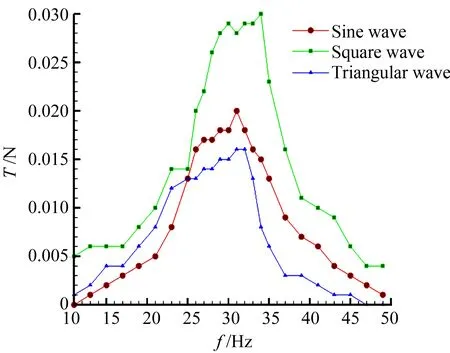
图18 不同电压波形下推力随频率的变化Fig.18 Curves of the thrust with changing frequencies under different driving waveforms
5 结 论
本文通过开展水下合成双射流流场特性和推力特性的实验研究,得出了如下结论:
1) 水下合成双射流的流场经过相位平均后具有很好的对称性,在向下游发展的过程中合成双射流渐渐合成一股稳定射流,并不断向外扩散,射流速度也逐渐减小。
2) 驱动电压频率的改变会使水下合成双射流强度发生明显改变,且存在最佳驱动频率使得射流强度达到最大,本文所用的激励器最佳工作频率在30 Hz左右。平均流场的流向速度随着电压幅值的增大而增大,但电压幅值对水下合成双射流平均流场的流场结构影响并不大。
3) 电压波形对水下合成双射流平均流场的流场结构有显著影响,正弦波驱动下产生的平均射流扩散角更大,流场速度等值线形状也更加圆滑“饱满”,矩形波和三角波驱动下产生的平均流场速度等值线更加“扁平”,不规则性更强。三角波激励产生的射流速度明显小于其它两种波形,矩形波所产生的射流速度除了在中心位置与正弦波产生的速度相近以外,在其它位置的速度比正弦波产生的速度稍大。
4) 水下合成双射流的推力随着频率的增大呈现先增大后减小的变化趋势,曲线整体呈现为单峰状且波峰处于30~33 Hz左右;推力随着驱动电压幅值的增加而增加,且电压幅值的变化不影响推力的频率变化特性;在相同频率下,矩形波驱动所产生的推力比其余两种波形产生的推力大,三角波驱动所产生的推力在25 Hz以前比正弦波驱动所产生的推力大,在25 Hz以后比正弦波驱动所产生的推力小,电压波形的变化并不影响推力的频率变化特性。
[1]Mittal R, Rampunggoon P. On the virtual aero-shaping effect of synthetic jets[J]. Phys Fluids,2002, 14(4): 1533-1536.
[2]Catlynne E, Rumiggny N, Amitay M. Virtual aero-shaping of a Clark-Y airfoil using synthetic jet actuators. AIAA 2001-0732[R]. Reston: AIAA, 2001.
[3]Pack L G, Seifert A. Periodic excitation for jet vectoring and enhanced spreading[J]. Journal of Aircraft,2001, 38(3): 486-495.
[4]Guo D H, Cary A. Numerical simulation of vectoring control of a primary jet with a synthetic jet [J]. AIAA Journal, 2003, 41(12): 2364-2370.
[5]Zhao Hong, Yang Zhiguo, Lou Huijuan. Experimental investigation of flow characteristics of synthetic jet and its preliminary application to combustion[J]. Journal of Aerospace Power, 2004(4): 512-519. (in Chinese)赵宏, 杨治国, 娄慧娟. 合成射流流动特性实验研究及在燃烧中的应用探讨[J]. 航空动力学报, 2004, 19(4): 512-519.
[6]Hao Lishu, Qiao Zhide. Maximizing the effect of synthetic jet on airfoil separation flow control[J]. Journal of Northwestern Polytechnical University, 2006, 24(4): 528-531. (in Chinese)郝礼书, 乔志德. 合成射流用于翼型分离流动控制的研究[J]. 西北工业大学学报, 2006, 24(4): 528-531.
[7]Gilarranz J L. Development of high-power, compact synthetic jet actuators for flow separation control[D]. Texas A&M University, 2001.
[8]Liang Y, Taya M, Yasuo K. Design of diaphragm actuator based on ferromagnetic shape memory alloy composite[C]//Pro. of the SPIE, 2002: 206-216.
[9]Yao C S, Chen F J. Synthetic jet flow field database for CFD validation. AIAA 2004-2218[R]. Reston: AIAA, 2004.
[10]Luo Z B, Xia Z X, Liu B. New generation of synthetic jet actuators[J]. AIAA Journal, 2006, 44(10): 2418-2419.
[11]Polsenberg-Thomas A M, Burdick J, Mohseni K. An experimental study of voice-coil driven synthetic jet propulsion for underwater vehicles[C]//OCEANS Proceedings of MTS/IEEE. IEEE, 2005: 923-927.
[12]Krieg M, Coley C, Hart C, et al. Synthetic jet thrust optimization for application in underwater vehicles[C]//Proc. 14th Int. Symp. on Unmanned Untethered Submersible Technology (UUST)(Durham, NH, 21-24 August 2005), 2005.
[13]Krueger P S, Gharib M. Thrust augmentation and vortex ring evolution in a fully-pulsed jet[J]. AIAA Journal, 2005, 43(4): 792-801.
[14]Luo Zhengbing. Principle of synthetic jet and dual synthetic jets, and their applications in jet vectoring and micro-pump[D]. Changsha: National University of Defense Technology, 2006. (in Chinese)罗振兵. 合成射流/合成双射流机理及其在射流矢量控制和微泵中的应用研究[D]. [博士学位论文]. 长沙: 国防科技大学, 2006.
[15]Deng Xiong. Research on vector-controlling characteristic of dual synthetic jets and its applicationsin heattransfer enhancement[D]. Changsha: National University of Defense Technology, 2015. (in Chinese)邓雄. 合成双射流矢量控制特性及其强化换热应用研究[D]. [博士学位论文]. 长沙: 国防科技大学, 2015.
Experimental investigation on characteristics of flow field and propulsion of dual synthetic jets in water
Peng Lei, Luo Zhenbing*, Deng Xiong, Yang Shengke
(CollegeofAerospaceScienceandEngineering,NationalUniversityofDefenseTechnology,Changsha410073,China)
The flow field and propulsion characteristics of dual synthetic jets (DSJ) in water is investigated using the particle image velocimetry (PIV) system and propulsion measuring system. The results of the experimental investigation reveal the noticeable symmetrical pattern of average flow field created by underwater dual sythetic jets actuator (DSJA) .The influence of DSJA`s working parameters on flow field characteristics and propulsion of dual synthetic jets in water is studied by changing the driving frequency, amplitude of voltage and voltage waveform.The results shows that there is an optimum driving frequency existed, which generates the maximum propulsion, and the propulsion will increase according to the rise of the amplitude of voltage.
underwater; dual sythetic jets; PIV; time-averaged flow field; propulsion
0258-1825(2017)02-0290-09
2016-12-25;
2017-02-22
国家自然科学基金(11372349,11602299,11572349)
彭磊(1991-),男,湖北随州人,硕士研究生,研究方向:主动流动控制. E-mail:penglei_hust@163.com
罗振兵*,男,教授,研究方向:主动流动控制. E-mail: luozhenbing@163.com
彭磊, 罗振兵, 邓雄, 等. 水下合成双射流流场特性与推力特性实验研究[J]. 空气动力学学报, 2017, 35(2): 290-298.
10.7638/kqdlxxb-2016.0183 Peng L, Luo Z B, Deng X, et al. Experimental investigation on characteristics of flow field and propulsion of dual synthetic jets in water[J]. Acta Aerodynamica Sinica, 2017, 35(2): 290-298.
V211.7
A doi: 10.7638/kqdlxxb-2016.0183
