基于Matlab的无刷直流电动机驱动系统仿真建模
2017-04-27张健王笑竹
张健, 王笑竹
(营口理工学院, 辽宁营口115014)
基于Matlab的无刷直流电动机驱动系统仿真建模
张健, 王笑竹
(营口理工学院, 辽宁营口115014)
基于Matlab/Simulink工具搭建无刷直流电机驱动系统仿真平台,分别建立直流无刷电机的本体模型和驱动控制模型,详细介绍了系统中各个子模块的搭建方式和实际功能,为分析驱动控制算法和策略可行性提供有效的仿真环境。通过实验仿真曲线特征和变化规律,实现了驱动系统各项性能评价指标和PID参数整定的验证,模型参数也为实际电机控制系统的设计和调试提供支撑。系统模型具有很好的灵活性和通用性,在此基础上通过简单的替换和修改就可以搭建和仿真使用其他控制算法和控制策略的仿真模型,为模糊控制、模糊PID控制和再生制动控制策略建立仿真环境提供参考,减少验证过程中的工作量。
无刷直流电动机;驱动系统;反电动势过零检测;仿真分析
引言
长期以来,随着无刷直流电机的应用日趋广泛,其控制算法和控制策略也越来越丰富,国内外学者就此做了深入研究,并取得丰硕的成果。其中反电动势法、续流二极管法、状态观测器法及锁相环法是当前的热点问题[1-2],但是缺少对这些方法的验证环境和评价体系,这在一定程度上限制了控制算法和策略的改进。因此建立简单精确的仿真模型成为目前亟待解决的问题[3-5]。
为了便于评价分析和验证各种控制算法和策略,有必要对各种无刷直流电机驱动系统进行正确的建模和仿真,以此作为驱动系统可行性和性能评价的依据,基于Matlab/Simulink搭建无刷直流电机驱动系统各项性能评价指标和PID参数整定的验证仿真平台,为实际电机控制系统的设计和调试提供支撑。
1无刷直流电动机数学模型
预建立无刷直流电机的数学模型,需要在合理的理想条件范围内对其进行必要的简化[6-8]。
电压平衡方程式可表示为:
(1)
式中:uX、eX、iX、RX、LXX和LXY分别为三相定子相电压、反电势、相电流、相电阻、绕组自感和绕组互感,P为微分算子。因在三相对称的电机中存在:ia+ib+ic=0,LXX=L,LXY=M,RX=R,故有Mia+Mib+Mic=0,则式(1)经整理可得:
(2)
无刷直流电动机的运动方程可写为:
(3)
(4)
其中:ω为电机的角速度;Pn为电机的磁极对数;Te为电机电磁转矩;TL为电机的负载转矩;B为粘性阻尼系数;J为电机的转动惯量。
2无刷直流电动机仿真建模
2.1无刷直流电动机本体的建模
电机本体是整个系统的核心,系统以模块式搭建,功能彼此独立每个模块构成一个有机整体,实现电机本体仿真平台[9-11]。
(1)电压方程模块
根据电压方程可搭建电机电压方程模块,如图1所示。
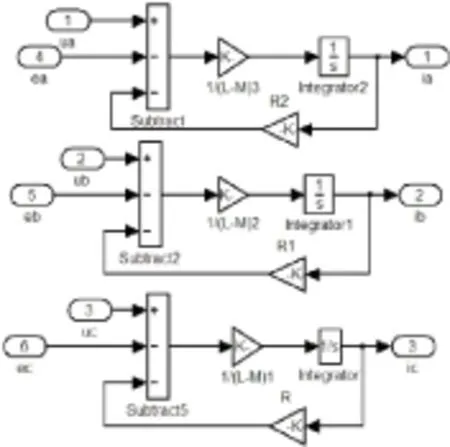
图1电压方程模块
(2)电机反电动势模块
反电动势模块采用分段线性查表法[12],其仿真结构如图2所示。
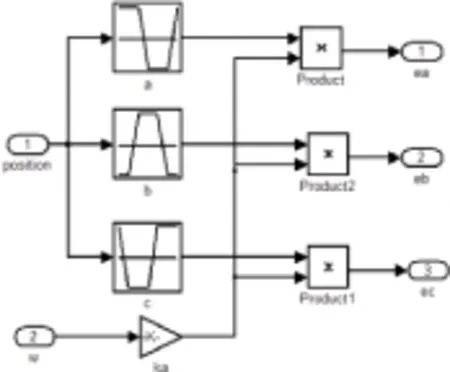
图2反电动势模块及其封装
图2中,反馈回来的转子位置信号position(范围为0~2π)经过LookupTablet模块,与转速信号增益后分别相乘,得到三相绕组的反电动势。其中LookupTablet模块是完成查表法的关键环节[13-15]。
(3)电机转矩计算模块
由式(3)和式(4)很容易得到电磁转矩与转速模块,如图3所示。转子位置检测模块如图4所示。
图3电机转矩计算模块

图4转子位置检测模块
建模完成后,就可以通过适当的链接完成电机本体总模型的建模,各环节的链接及电机本体的总模型如图5所示。
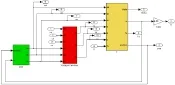
图5电机本体的总模型
2.2无刷直流电动机驱动系统建模
利用Matlab7.0 的Simulink模块对无刷直流电机驱动系统进行建模,建立的整体驱动系统如图6所示。

图6无刷直流电机驱动系统模型
无刷直流电机驱动仿真系统的工作原理可简要介绍为:预定的转速信号(n-ref)与实际转速信号n进行比较,求其偏差e,经PID控制器计算得电流幅值信号Is,参考电流模块(referencecurrent)利用PID控制器输出的电流幅值信号Is和反馈的转子位置信号(position)计算三相绕组各自的参考电流iar、ibr、icr,然后经电流滞环控制模块(CurrentController)实现各相实际电流ia、ib、ic对参考电流iar、ibr、icr的滞环跟踪,输出PWM逆变器控制信号(Pulse),用于控制逆变器模块(MOSFETDiode)的导通和关断,从而产生驱动电机的输入相电压ua、ub、uc,同时在给定时间对电机施加给定的负载转矩tl,利用示波器观察各相电流(i_abc)、各相反电动势(emf)、电磁转矩(Te)、转过角度及转子位置(theta)和转速(n),并反馈给前面的模块作为反馈信号,实现闭环控制。
(1)速度控制模块
BLDC驱动系统的速度环控制由速度控制模块实现,其结构如图7(a)所示。速度控制采用PID控制器实现,转速预设值(n_ref)与反馈回来的实际转速信号(n)求其差值e,输入PID控制器作为其输入,经PID算法计算后输出电流幅值信号Is,作为参考电流模块的输入信号。离散PID控制器的内部结构如图7(b)所示。
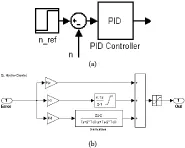
图7速度控制模块
(2)参考电流模块
如图8所示,参考电流模块根据PID控制器输出的电流幅值信号(Is)和反馈回来的转子位置信号(position)作为参考电流iar、ibr、icr完成电流滞环控制。
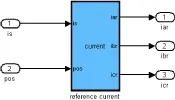
图8参考电流模块
参考电流模块的代码为:
依照野生观赏植物的形态特征与观赏部位将观赏植物分为观花类、观果类、观叶类、观形类4类,由于某些植物的观赏特性极为丰富,故该4种观赏特性没有固定的界定标准。
function[iar,ibr,icr] =current(is,pos)
%ThisblocksupportsanembeddablesubsetoftheMATLABlanguage.
%Seethehelpmenufordetails.
iar=is;
ibr=-is;
icr=0;
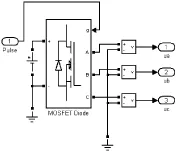
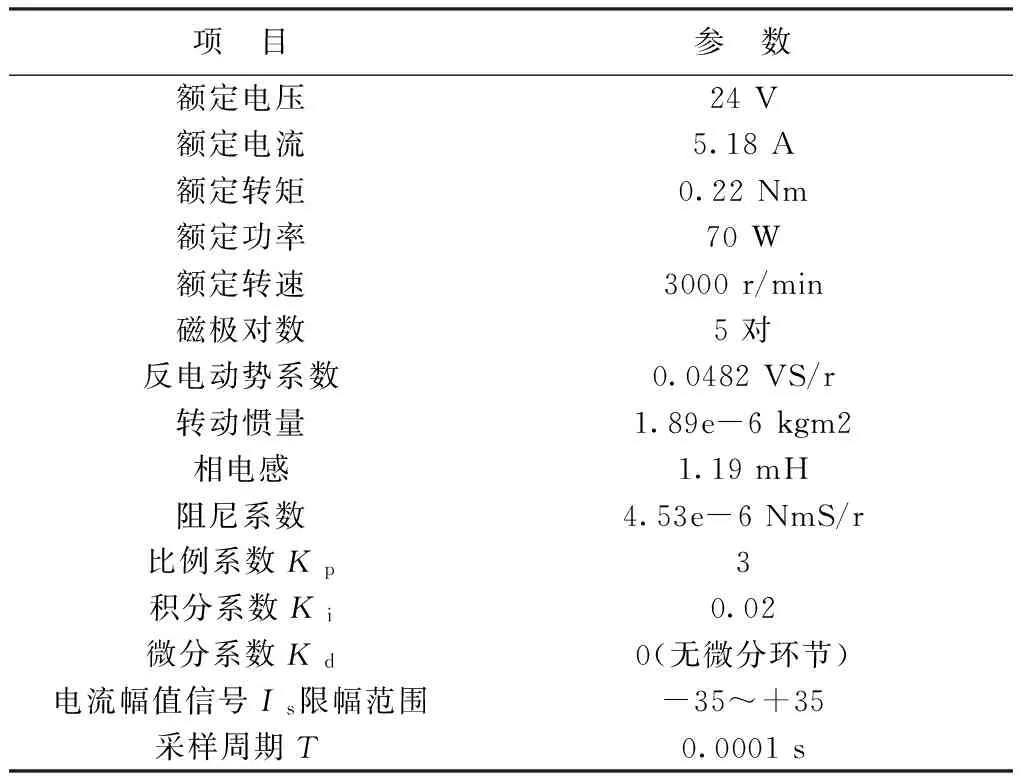
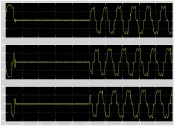
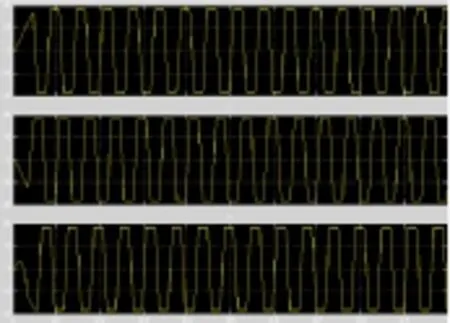
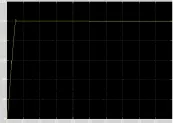
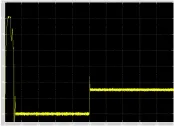
if(pos>=0&&pos iar=is;ibr=-is;icr=0; elseif(pos>=pi/3&&pos<2*pi/3) iar=is;ibr=0;icr=-is; elseif(pos>=2*pi/3&&pos iar=0;ibr=is;icr=-is; elseif(pos>=pi&&pos<4*pi/3) iar=-is;ibr=is;icr=0; elseif(pos>=4*pi/3&&pos<5*pi/3) iar=-is;ibr=0;icr=is; elseif(pos>=5*pi/3&&pos<=2*pi) iar=0;ibr=-is;icr=is; end (3)电流滞环控制模块 如图9所示,电流滞环控制模块(CurrentController)实现各相实际电流ia、ib、ic对参考电流iar、ibr、icr的滞环跟踪,输出PWM逆变器控制信号(Pulse)。 图9电流滞环控制模块 (4)电压逆变器模块 采用SimPowerSystems工具箱的直流电源模块(DCVoltageSource)和全桥模块(UniversalBridge),其中全桥模块选择桥臂数为3个,功率器件为MOSFET,电流滞环控制模块输出的PWM波形(Pulse)控制MOSFET的导通与关断,从而实现对无刷直流电机的三相全桥控制,如图10所示。 图10电压逆变器模块 由于SimPowerSystems里的模块不能直接相连Simulink里的模块,因此,全桥模块(UniversalBridge)与电机本体模块之间加上了三个受控电压源,实现两者的连接。 选用的电动机为57BL系列,仿真参数可依照所选用的电动机说明书设置,见表1。 表1电机参数 仿真过程中,绕组电流、反电动势、位置信号和转速、转矩波形图如图11~图15所示。 图11绕组电流仿真波形图 图12绕组反电动势仿真波形图 图13转子转过角度和转子位置仿真波形图 图14电机转速仿真波形图 图15电机转矩仿真波形图 其中,图13的上半部分所示为转子转过的角度theta仿真波形,单位是rad。可以看出,在初始转速上升阶段,theta直线上升,斜率逐渐增大,随后斜率稳定直线上升,在t=0.5s时加负载后角度上升斜率几乎不变,说明转速波动不大,这与后面的转速仿真结果相符。由于仿真时间为1s,在转速为n=1000r/min的条件下转过的圈数约为16.7圈,且极对数P=4,故1s时转过的角度theta为16.7×4×2π=419.7,与图13中所示相符。 图13的下半部分为转子位置position的仿真波形。转速稳定后转子位置呈周期性变化,且由于极对数P=4,故转子转动一个周期其位置变化4个周期。由于仿真时间为1s,在转速为n=1000r/min的条件下转过的圈数约为16.7圈,且极对数P=4,故1s内position周期数应为16.7×4,约66个周期,与图13中所示相符。 由图14中可知,当初始时刻提供1000r/min的参考转速时,电机实际转速逐渐增大,并在0.1s之前达到1000r/min,然后保持稳定下来,说明系统响应快速且平稳,无静态误差。 在0.5s时突然增加TL=3N·m的负载转矩,此时电机实际转速会发生突降,且在短时间内恢复稳定,稳定转速在略低于1000r/min的转速下小范围脉动,这主要是由电流换相和电流滞环控制器的频繁切换引起的。在此过程中没有发生大范围波动,这说明系统的稳定性较好,满足设计要求。 图15为电机转矩的仿真波形图,与转速仿真图类似,从电机转矩的仿真波形来看,转矩数值与实际情况相符,转矩响应快速、脉动小,满足设计要求。 基于Matlab/Simulink仿真环境,搭建的无刷直流电机本体仿真模型和转速-电流双闭环驱动控制系统模型具有很好的灵活性,在此基础上通过简单的替换和修改就可以搭建和仿真使用其他控制算法和控制策略的仿真模型,具有良好的通用性。 [1] 张健,王笑竹.dsPIC30F6010的直流无刷电机控制系统[J].单片机与嵌入式系统应用,2015,15(9):57-60.[2] 郎宝华,闵喜艳,张婧.基于dsPIC30F3010 的无刷直流电动机控制系统设计[J].电子设计工程,2012,20(2):104-107,111. [3] 王晓明,王玲.电动机的DSP控制:TI公司的DSP应用[M].北京:北京航空航天大学出版社,2004. [4] 王晓明.电动机的单片机控制[M].北京:北京航空航天大学出版社,2002. [5] 吴青萍.基于dsPIC30F4012的无刷直流电动机控制系统设计[J].微特电机,2012,40(8):43-45. [6] 马瑞卿,李颖,刘冠志.基于dsPIC30F2010的无刷直流电动机正弦波驱动系统设计[J].微特电机,2010,38(8):11-14. [7] 张冉,王秀和,王道涵.基于dsPIC30F2010的无刷直流电动机控制系统设计[J].微特电机,2008,36(5):30-31,42. [8] 张健,王笑竹.dsPIC30F6010双闭环矢量法在电机控制中的应用[J].单片机与嵌入式系统应用,2015,15(12):15-18. [9] 岳学磊,白鹏.关于无刷直流电机调速系统优化控制研究[J].计算机仿真,2015,32(10):414-419,425. [10] 吕志宽,李声晋,卢刚,等.基于卡尔曼滤波器的无刷直流电动机仿真[J].微特电机,2011,39(4):24-28. [11] 梅亮,刘景林,董亮辉,等.基于Simulink无刷直流电机直接转矩控制研究[J].微电机,2013,46(6):62-66.[12] 李亚美.交流伺服控制系统的模型与仿真[J].伺服控制,2012(5):40-42,36. [13] 刘维维,张亚,崔瑞男,等.电动车无刷直流电机控制系统Matlab仿真[J].工业控制计算机,2011,24(6):32-33,35. [14] 吕伟鹏.无刷直流电机双闭环串级控制系统仿真研究[J].电子设计工程,2011,19(24):30-34. [15] 郭伟,张爱华,陈琛,等.无刷直流电机调速优化控制与仿真[J].计算机仿真,2015,32(10):360-364. Simulation Model of Brushless DC Motor Drive System Based on Matlab ZHANGJian,WANGXiaozhu (Yingkou Institute of Technology, Yingkou 115014, China) Simulation platform of Brushless DC motor drive system is established based on Matlab/Simulink. The ontology model and drive control model of DC brushless DC motor are set up, and the construction methods and practical functions of each sub module are introduced in detailwhich provide the simulation environment to analyse the drive control strategy and algorithm feasibility effectively. Based on the characteristic and variation law of simulation curve, the performance of the evaluation index system and the setting of PID parameter validation are texted, besidesm, the design and debugging of the actual motor control system are supported by the model parameters. On this basis, through simple modifications or replacement, the simulation model which can use other control algorithms and control strategies are built and it can provide a reference for fuzzy control, fuzzy PID control and regenerative braking control strategy in simulation environment to reduce the workload of the process validation. Brushless DC motor; motor control system; anti EMF zero crossing detection; simulation analysis 2016-12-09 营口理工学院青年自然科学研究项目(QNL201614;QNL201616) 张 健(1981-),男,高级实验师,博士生,主要从事电力电子与电力传动、电机控制等方面的研究,(E-mail) 64755512@qq.com; 王笑竹(1982-),女,讲师,硕士,主要从事超声电机与压电材料方面的研究,(E-mail) 330608566@qq.com 1673-1549(2017)02-0016-05 10.11863/j.suse.2017.02.04 TM33 A
3仿真结果及分析

4结束语