精准定位型变电站周界联动安防系统的设计
2017-04-26杨俊杰
黄 毅, 杨俊杰
(上海电力学院 电子与信息工程学院, 上海 200090)
精准定位型变电站周界联动安防系统的设计
黄 毅, 杨俊杰
(上海电力学院 电子与信息工程学院, 上海 200090)
针对传统变电站周界安防系统无精准定位、无联动互补、模块独立性低等问题,提出了一种可精准定位、多技术联动、总线制通信的解决方案.利用激光测距、超声波测距设计了一种新型报警定位围栏,联动网络摄像头、电子围栏、语音报警及GPRS等实现抓拍取证、阻挡、报警等功能;采用总线制提高了系统稳定性及模块独立性;报警定位围栏最大定位误差为0.2 m,可以满足安防定位要求,并在实际工程中验证了整体方案的有效性.
变电站; 安防; 总线制; 激光测距; 超声波测距; 网络摄像机
变电站无人值守化的发展趋势对其周界安防提出了更高的要求.传统“四遥”可有效管控站内设备运行,但对周界安防却无能为力[1-2].目前,国内外无人值守变电站安防技术主要为3类:一是物理阻挡类,如高压电网、电子围栏等;二是入侵自恢复类,如红外围栏、激光围栏等;三是视频监控技术.但在实际应用中,单一技术存在各自的不足:物理阻挡类有一定的危险性且不可预警,易招致法律纠纷;入侵自恢复类只检测入侵却无法阻挡入侵;视频监控信息密度较低[3-4].传统变电站安防系统一般按防区设计[5],一个防区中控制器与多对红外或激光围栏集成在一起,这种设计模块独立性低,当某防区中一对围栏老化损坏时,则整个防区持续报警,导致整个系统瘫痪.本文提出了一种新型变电站周界安防系统:集成报警定位围栏检测入侵、语音模块警告、探照灯威慑、电子围栏阻挡、网络摄像头录像取证及GPRS短信报警等功能,实现了多技术的互补联动安防;利用激光及超声波测距技术,设计新型报警定位围栏,使报警信息精确至入侵点,提高了警情处理和摄像头联动的效率;系统折中采用稳定的RS485总线制通信,通过增删轮询地址提高了各终端模块的独立性,且较传统分线制通信简化了布线.
1 系统方案
本系统分为集中控制层、传输层、现场工作层3层.
集中控制层指控制室内的上位机,它负责轮询及控制RS485总线上的终端,显示并存储报警信息及控制网络摄像头方向.
传输层指由RS485中继器和屏蔽双绞线组成的通信线路及网络路由器,前者解决了电磁环境恶劣的变电站内上位机与现场终端多点远距离可靠通信的问题,后者负责TCP/IP网络维护,可将系统中各个网络摄像机互联成一个整体并联接至上位机及互联网.
现场工作层指位于变电站周界的终端,包括报警定位模块、辅助防御控制器、电子围栏、探照灯、语音报警模块、GPRS模块、网络摄像头等,主要负责入侵的检测定位、辅助防御模块管理、威慑及取证等工作.系统结构如图1所示.
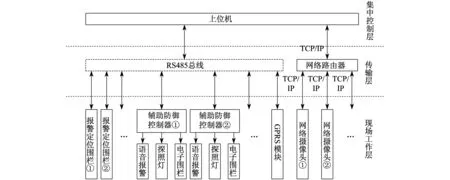
图1 系统结构
系统前端摒弃了传统的遮挡对射光束发出报警开关信号的围栏设计思路,利用日益成熟的脉冲式激光测距及超声波测距技术,设计了一种新型报警定位围栏,在笔直周界两端分别安上报警定位围栏和反射板,围栏内的激光测距模块以一定的频率工作.正常情况下,激光应被周界末端反射板反射,所测值为周界段长度;有入侵时激光被入侵者遮挡反射,所测值突变为报警定位围栏至入侵者的距离值.判断警情后上报通信MCU,通信MCU在上位机轮询本机地址时上报警情.脉冲式激光测距量程很大,但存在数米盲区,系统集成了量程虽小但盲区仅为厘米级的超声波测距与之互补.
正常工作时,摄像头在围墙内侧自动巡航,上位机飞速轮询总线终端,辅助防御模块休眠,仅依靠安装在周界外侧的报警定位模块进行实时布防.出现入侵时报警定位模块及时定位入侵点,并在轮询到来时报警.上位机接到报警后的工作过程如下:
(1) 在拓扑图上显示入侵点并记录警情至数据库;
(2) 对相应辅助防御控制器发出指令以控制其下辖辅助防御模块实施警告、威慑及阻挡等动作;
(3) 发出指令控制GPRS模块,短信通知工作人员;
(4) 经网络路由器控制相应网络摄像头云台,将其及时旋转至入侵点方向录像取证,远程控制中心可由以太网访问站内摄像头进行实时查看.
2 硬件设计
2.1 报警定位围栏设计
报警定位围栏集成4组激光测距和超声测距模块,各组间距为16 cm,当相邻两组都报警时才认定为入侵,以防飞禽引起的误报.相邻测距模块中激光及超声波频率均经调制以防互扰.周界另一端安装反射板是为了校准激光方向,使之形成有效的发射接收回路以保证防控有效.报警定位围栏结构和测距模块结构如图2所示.

图2 报警定位围栏结构和测距模块结构
2.1.1 测距模块
激光较好的单色性、相干性及对直性常被用于光学定位、工程测量、地形勘探等领域[6].激光测距原理一般分相位式和脉冲式两种,两者的区别如表1所示.

表1 相位式与脉冲式比较
相位式需合作目标配合测距故不能满足安防要求.本系统采用脉冲式测距,无需合作目标且结构复杂度和实时性均优于相位式.其精度虽不及相位式但足以满足安防定位要求.如图2b所示,工作时激光模块MCU令发射头发射周期性激光脉冲,同时发射头向时刻鉴别单元发出开始信号,使其记下开始时刻t1,脉冲到达反射板或有入侵者时发生漫反射,返回接收头后再经通道2到达时刻鉴别单元,记下接受时刻t2.设光速为c,则距离为:
(1)
但脉冲式激光测距存在测量盲区,其计数芯片及电路有延迟,目标过近会使激光回波过快到达计数门,若导致计数门尚未有效计数就关闭即会形成盲区.系统所用模块设定量程为200 m,盲区约为8.2 m.在盲区内入侵可正常报警但位置值是乱码.本系统集成超声波测距模块与之互补.
超声波反射性好,指向性强,能量消耗慢,用其测距较迅速简单、易实时控制.系统所用模块量程达9 m,盲区及精度为厘米级.其工作原理与脉冲式激光测距类似,MCU触发一系列高频方波给发射电路并激励出超声波,正常工作时该模块接收不到回波,量程内有入侵则遇障返回接收器,经滤波、放大、整形后进入MCU.测得从发射至接收所用时间和空气中的声速,即可计算与入侵点的距离.常温下,空气中的声速为340 m/s,且受压强和温湿度的影响,需检测并综合这些因素加以校准[7].
2.1.2 报警定位围栏的集成
围栏中各模块通过I2C总线相联.围栏作为总线终端,其通信MCU需实时应答上位机轮询.因此,工作时让激光模块和超声波模块自行过滤测量值,当判断有入侵时再将位置主动上报通信MCU.此新型围栏可精准定位入侵点,提高了警情处理效率,也为精准联动摄像头抓拍取证提供了可能;此外也精简了围栏对数,降低了施工成本.理论上只要直线周界长度在测距量程内,则只需一个报警定位围栏和一个反射板.但集成时需注意以下3个因素:
(1) 测距频率 设入侵者身体厚度为20 cm,入侵速度 1 m/s(这是经验值,考虑翻越耗时和内侧电子围栏阻挡),入侵时间至少200 ms,即测距模块工作频率不低于5 Hz,本系统取10 Hz;
(2) 报警间隔 通信MCU在报警后设2 s(经验值)的报警间隔,降低报警冗余率,提升系统效率;
(3) 允许误差 激光报警定位模块正常工作时测距为自身与反射板的距离L,需考虑测量误差,其上限为人体宽度(系统安全值取L±20 cm).
2.2 监控模块
网络摄像机抗干扰力强且易联网.系统使用海康威视E系列智能球形网络摄像机,带云台及夜视功能,集成了一个小型网络服务器,可用客户端、浏览器或手机APP远程访问.布置以太网以实现视频传输,通过网络路由器实现多摄像头的连接及IP分配,在其中端口映射实现远程设备对本地摄像头的访问.图3为视频监控系统结构及其联动示意.

图3 视频监控系统结构及联动示意
图3b中,α=arctan((L/2-X)/H).调用网络摄像机提供的设备网络SDK开发包,根据角度值即可将方向对准入侵点抓拍取证了.
2.3 辅助防御模块及GPRS模块
辅助防御模块是系统的动作模块,上位机接到报警后先对GPRS模块(TC35I)发出指令,使其发送报警短信,再对辅助防御控制器发出指令,由其控制下辖的探照灯打开、语音模块播放语音、电子围栏高压布防.控制器MCU为STC89C52RC单片机,拥有3个16位定时/计数器及2个外部中断.外部中断0用于检测电子围栏入侵状态(剪断或两线接触);定时器1为控制过程提供计时基准.各报警定位围栏与各辅助防御模块预先根据现场情况合理配对,并将对应关系存储至上位机软件以实现对应的控制.控制器下辖的一对探照灯总功率近800 W,语音芯片为广州微创的WT588D,电子围栏为蓝星LX-2008型电子围栏.其各自的控制电路如图4,图5,图6所示.

图4 探照灯控制电路
2.4 RS 485总线制
变电站中电气设备众多,电磁干扰强烈.相对于无线,RS485通信质量较好,不易受外界干扰[8].传统分线制安防系统将多对围栏报警线逐一连至与非门,再与控制MCU的外部中断连接以实现报警,接线存在大量冗余.系统折中采用通信稳定且接线简单的RS485总线制,不仅使各终端间相互独立且可采用轮询式通信,实时监控各终端工作状态.设计时需对各节点电气隔离,使总线免受接电环路、传导性干扰噪声、节点高共模电压的影响.采用ECS8402型USB/RS-485转换器将系统连至主控室电脑.总线拓扑如图7所示.

图5 语音控制电路

图6 电子围栏控制电路

图7 RS485总线拓扑
3 系统软件设计
3.1 上位机软件
RS485总线硬件简洁,需在上位机软件中编写合适的通信协议来实现总线的分时共用.系统软件用C#开发,环境为Visual Studio 2010,采用VS自带的数据库以简化软件安装.上位机软件结构如图8所示.
软件除了登录管理、用户管理、警情查询外,还集成了以下几项功能.

图8 上位机软件结构
(1) 实时报警 正常状态时,界面显示蓝色周界拓扑并实时轮询各总线终端.收到报警时,将其存至数据库并在报警点位置闪烁红点,控制上位机自带音响报警,并向对应辅助防御模块发出动作指令,根据报警位置控制摄像头方向抓拍取证.若超时未收到终端应答帧时,软件将发出通信故障报警.
(2) 增删终端 传统大防区设计中,某一围栏损坏会影响整片防区.该软件建立轮询地址表,集成增删终端功能,某终端损坏持续报警时可在轮询列表中暂时删去对应地址,使系统继续工作,待更换完毕再恢复添加.
(3) 监控视频 用户可选择摄像头的编号查看其实时画面,还可通过云台控制其方向.
(4) 更新拓扑 传统安防系统软件需根据各变电站的实际拓扑数据量身定做,这制约了软件的通用性.该软件将拓扑数据存于数据库,并设置了更新拓扑子界面,用户可输入周界拐点坐标值更新数据库中的拓扑数据.软件运行时可从数据库中读取原始拓扑,提高了软件的通用性.
3.2 现场工作层模块的软件
各总线终端工作初始化后实时接收解析上位机轮询帧,若轮询地址指向自己便完成相应指令,否则抛弃轮询帧.其区别在于完成的具体工作:围栏负责定位报警;辅助防御控制器根据具体指令控制下辖的动作模块.入侵过程是一时间段而非瞬态,这段时间报警定位围栏会陆续更新、上报警情,上位机也会陆续对辅助防御模块发出动作指令,系统让辅助防御控制器覆盖接收指令,即有新指令到来时复位定时器,保证最后一条指令得到充分执行.程序流程如图9所示.

图9 现场工作层模块程序流程
4 实验环境及结果
该系统安装在湖南某220 kV变电站并进行了现场测试.周界划为4个防控单元,各单元安装1台摄像头、1套辅助防御控制器及其下辖的探照灯、语音模块、电子围栏.第1,第2,第3单元各安装4对围栏,第4单元安装3对围栏.控制室内装有上位机、网络路由器及GPRS模块.一周内随机对各防控段人为模拟入侵,各模块工作正常,反应灵敏.某防控段定位误差测试如表2所示.

表2 定位测试
现场沿周界拉直线,再用卷尺测量线长得到实际距离,测量误差稍大,但在安防定位的允许范围内.系统仍有9 cm盲区,程序对这部分默认为5 cm.超声波定位区相对精确,激光定位的最大误差为0.2 m,也未超过人体宽度,表明模拟翻越时报警定位围栏都能做到准确捕捉.
5 结 语
针对传统变电站周界安防系统,提出了一种新型方案,即利用测距技术设计新型报警定位围栏并验证其精度满足安防定位需求;集成多种安防技术实现互补联动;采用RS485总线制在保证通信稳定的同时提高了模块的独立性,并简化了布线.本系统实现了集预警、威慑、阻拦、精确定位、远程报警于一体的变电站周界安防,可为工程的实际应用提供一定的参考.
[1] 王兵,佟娜.无人值班变电站管理风险因素识别[J].管理智囊,2016(9):67-68.
[2] 孙科.变电站远程检测与控制信息系统的设计与实现[D].成都:电子科技大学,2013.
[3] 崔厚坤,洪莎莎.无人值班变电站智能安防辅助系统设计[J].电力系统通信,2012(8):75-78.
[4] 陈少尉,蔡东升,黄琦,等.基于ONVIF协议的变电站网络摄像机测试系统设计与实现[J].电测与仪表,2014(16):117-123.
[5] 许思龙,付奎,刘祥玲.发电厂新型多防区数字安防系统[J].电力建设,2012,33(9):98-100.
[6] 乔晓峰.脉冲式半导体激光测距仪的设计[D].南京:南京农业大学,2010.
[7] 苑洁.基于STM32单片机的高精度超声波测距系统的设计[D].北京:华北电力大学,2012.
[8] 唐晓辉.变电站的电磁干扰预测分析[D].天津:河北工业大学,2007.
(编辑 胡小萍)
Design of Locatable Linkage Security System of Transformer Substation
HUANG Yi, YANG Junjie
(SchoolofElectronicsandInformationEngineering,ShanghaiUniversityofElectricPower,Shanghai200090,China)
In view of the lack of precise localization and multi-technology complementary and low module indecency in the security system around the traditional substation,a solution is put forward,concluding precise positioning,multi-technology linkage,and bus system,and a new alarming and positioning fence is designed through the laser and ultrasonic ranging.The functions of intrusion detection,obstruction,alarm and so on are realized by network camera,electronic fence,voice alarm and GPRS.This improves the stability of the system and the independence of modules through the bus system.The maximum positioning error is 0.2 m,which can satisfy the requirements of security location.The overall plan is tested to be effective in the practical engineering.
substation; security; bus system; laser ranging; ultrasonic ranging; IP camera
10.3969/j.issn.1006-4729.2017.01.002
2016-07-06
杨俊杰(1977-),男,博士,教授,福建漳州人.主要研究方向为电力用户侧智能控制技术,变电站设备远程状态监测,无线传感器网络,嵌入式系统等.E-mail:iamyjj@163.com.
国家自然科学基金(61202369,61401269,61572311);上海市科技创新行动计划地方院校能力建设项目(14110500900);上海市教育委员会科研创新项目(13YZ102);上海市人才发展基金(201501).
TM76;TM63;TP277
A
1006-4729(2017)01-0004-07
