动力定位浮托安装船待命就位工况时域模拟
2017-04-25秦立成
许 南, 秦立成, 王 磊
(1. 海洋石油工程股份有限公司, 天津 300461;2. 上海交通大学 高新船舶与深海开发装备协同创新中心(船海协创中心), 上海 200240)
·实验技术·
动力定位浮托安装船待命就位工况时域模拟
许 南1, 秦立成1, 王 磊2
(1. 海洋石油工程股份有限公司, 天津 300461;2. 上海交通大学 高新船舶与深海开发装备协同创新中心(船海协创中心), 上海 200240)

开发了动力定位浮托安装法时域模拟工具,对某浮托安装船在动力定位方法下的待命就位过程进行了时域模拟研究。通过构建时域模拟模型,对该浮托安装船在各种海洋环境下的待命就位工况进行分析,得到该浮托安装船的位置偏移与消耗功率的时历与统计值。时域数值模拟的结果表明,该动力定位浮托安装船能够在180°和0°环境载荷作用下实现较为理想的待命就位,且在180°环境载荷作用下待命就位时,能避免驳船的推进器倒车,取得更好的定位精度和较小的功率消耗,是最佳的待命就位方向。该时域模拟的结果与分析,为实际的海上实船安装提供必要的理论与实践指导。
动力定位浮托安装; 待命就位; 时域模拟; 模型试验
0 引 言
海洋浮式结构物经常需要定位于某一精度范围内进行钻井、铺管、输油和安装等各种作业,定位系统是保证其海上正常生产工作的重要设备[1]。动力定位系统以其定位精度高、不受水深限制和高冗余度等优点得到了广泛的应用,它主要包括位置测量系统、控制系统和推力系统,其中控制系统是动力定位系统的核心部分[2-4]。装备有动力定位系统的海洋工程船舶能够精确定位于某一目标位置,或按预先设定的轨迹精确移动,完成各种工作。
浮托安装法是一种利用驳船将组块浮托运输到目标导管架处,然后通过调节驳船吃水实现浮托对接,最后退船完成安装的海上安装方法。浮托法由于避免了繁琐的分块吊装和对大型起重设备的需求,成为安装大型海上设备组块的主流方法。动力定位浮托安装法依靠驳船的自航能力、较强的压载能力和精准的对接能力,大大缩短了常规浮托安装所需要的时间成本,近年来得到了广泛的研究与应用[5]。动力定位浮托安装法的一般流程包括装船、运输、待命就位、进船、安装和退船。其中,待命就位是浮托安装船在进船安装前的重要准备阶段,用以观测动力定位系统的定位精度和功率消耗,决定进船安装的最佳时机[6]。
本文重点研究了动力定位浮托安装法中的待命就位阶段,通过分析研究时域模拟结果,为实际的动力定位浮托安装操作提供参考。
1 动力定位系统的数学模型
1.1 坐标系定义
如图1所示,动力定位系统通常采用三组坐标系分析海洋结构物的运动[7]。
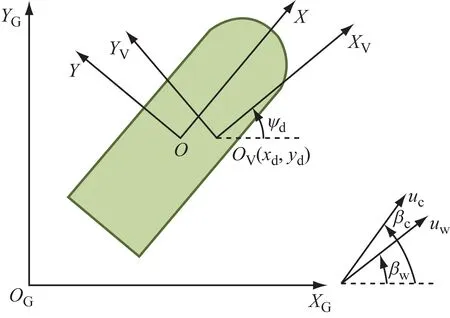
图1 坐标系的定义
(1) 大地坐标系(XGYGZG)。该坐标系主要定义船舶相对于原点的位置,包括水平偏移和艏向角。
(2) 动坐标系(XYZ)。该坐标系固定于船上并且随船一起运动,坐标原点在船舶的重心处。动坐标系多用于表达船舶的运动和受力。
(3) 参考平行坐标系(XVYVZV)。该坐标系通常跟随船舶行驶轨迹进行平面运动,不随船舶摇荡。在动力定位分析中,该坐标系固定于定位的目标点。
上述坐标系中,船舶在大地坐标系中的位置和欧拉角(η∈R6)与动坐标系中船舶的速度(ν∈R6)有如下关系:
(1)
式中:J(η)∈R6×6为转换矩阵[8]。
由于动力定位系统主要控制海洋结构物的水平面内的运动,则速度关系式可简化为3自由度,即为:
(2)
(3)
1.2 非线性低频运动
动力定位系统的研究中,通常将船舶的运动分为非线性的低频运动和线性的波频运动[9-10]。动力定位主要考虑船舶的低频运动模型,其运动方程可以表示为:

(4)
式中:M∈R6×6为船舶质量矩阵,包括附加质量部分;CRB(ν)∈R6×6和CA(ν)∈R6×6分别为由船舶刚体质量和附加质量引起的科氏力作用矩阵;D(νr)∈R6为阻尼力矩阵,其大小与船舶和海流的相对速度νr相关;G(η)∈R6为广义回复力,由浮力和重力产生;τenv∈R6为风力和二阶波浪力,流力已包含在相对速度νr中;τmoor∈R6为锚泊系统的回复力,若系统无锚链作用,则该项为0;τc∈R6为动力定位系统的推力部分,包括推进系统产生的推力和力矩。
1.3 线性波频运动
线性波频运动方程如下式所示[11-12]:
(5)
(6)

1.4 波浪载荷
在平台的低频运动模型中,风力和流力采用定常力,由模型试验测得,唯一随时间变化的是二阶波浪力。二阶波浪力包括平均漂移力、低频(差频)力和高频(和频)力,其大小与入射波的平方成正比。假定入射的不规则波用谐波的叠加来表示,则二阶波浪力(忽略高频部分)可以通过二次传递函数(QTF)表示:

(7)
式中:ωi是波浪频率;ζi是波幅;εi是随机相位角。二次传递函数Pij和Qij的计算非常耗时,一般通过商业软件来计算,本文的QTF由水动力计算软件HydroStar计算得到。
1.5 控制系统与推力分配
时域模拟程序的控制系统模型采用经典的PID控制。在水平方向上3个自由度的PID控制方法如下式所示[13]:
(8)
PID控制中的3个系数类比于弹簧-阻尼模型具有明显的物理意义。实际上,采用PID控制策略的动力定位系统即为海洋结构物在水平面内提供了回复刚度和一部分运动阻尼。积分系数用于消除稳态误差,通常情况下取为零。
推力分配策略将控制系统输出的推力分配到各个推进器上,通过求解如下最优化问题的最小值的解来获得推力分配的结果:
(9)
式中:Ti是第i个推力器的推力;n是推力器的数目;C是权重系数;αi是推力器的方向;xi和yi是推力器相对于船舶重心的位置。可以通过设置禁止角,即对αi的取值范围加以限制,减小推力器之间的水动力干扰。一旦求得各个推力器的推力,对应的功率可以通过下式计算:
(10)
式中:D为螺旋桨直径;KT为推力系数;KQ为转矩系数,KT、KQ可根据轴向进速在螺旋桨敞水性能曲线上查取。
2 数值模拟实例
2.1 驳船模型
本文的研究对象为装备有动力定位系统的某驳船,该驳船将用于惠州25-8油田中心平台上部模块的运输和浮托安装作业。该驳船在待命就位下的主要参数如下:总长LOA= 221.6 m,型宽B= 42 m,型深D= 13.3 m,吃水T= 9 m,船重M= 66 981 t,重心纵向位置(从船尾)XG= 104.53 m,重心横向位置 (左舷正)YG= 0 m,重心垂向位置(从船底)ZG= 16.18 m,横摇惯性半径Rxx= 21.84 m,纵摇惯性半径Ryy= 56.31 m,首摇惯性半径Rzz= 56.10 m。
驳船的总布置图及型线图如图2所示。
2.2 动力定位系统的推进器
该驳船共装备有三类共7套推进器,分别为1套艏部槽道推进器,2套尾部槽道推进器,2套全回转推进器以及2套主推进器。各推进器在水平面上的位置分布如图3所示。各推进器的主要性能与相对驳船重心的水平位置如表1所示。随船坐标系及各全回转推进器与舵的初始零位和转角正方向在图3中也进行了说明。环境力和推力器所产生的推力的坐标系与随船坐标系相同,艏摇力矩的正向遵循右手准则。

表1 实船上的推进器各主要性能与相对重心处的水平位置
2.3 海洋环境载荷
时域模拟中采取风、浪、流同向联合作用作为计算的环境条件,波浪选用ISSC谱,风速和流速均采用定常值。同时考虑到推进系统的配置,驳船将无法在45°和90°环境载荷下实现待命就位,因此将环境载荷的方向取为0°和180°。具体的环境载荷参数如下:有义波高Hs= 1.5 m,谱峰周期Tp=16.18 s,波浪谱 ISSC,流速vc= 1 m/s,风速vw= 15 m/s。
2.4 时域模拟与分析
通过在 Matlab/Simulink 环境下自主编写的动力定位时域模拟程序,对该驳船的待命就位状态进行数值模拟。时域模拟共持续13 800 s,去掉前1 800 s的数据以排除瞬态影响,数值结果和分析如下。
漂移半径是衡量动力定位系统定位精度的重要指标,它反映了动力定位船舶的实际位置与目标位置之间的距离,其定义为:
(11)
式中:x,y分别为驳船在大地坐标系下相对于定位位置的坐标。
待命就位状态下,180°和0°环境载荷作用下驳船的位置统计信息如表2所示。漂移半径的时历曲线如图4和图5所示。
由统计结果可以看出,驳船在180°和0°的环境载荷作用下,均可以实现高精度的定位,平均漂移半径分别为0.533 3 m和0.573 4 m,最大漂移半径均不超过1 m。虽然在180°和0°环境载荷作用下,驳船的艏摇运动和横荡运动都非常理想,但从数值上看,驳船在180°环境载荷下的艏摇和横荡运动要比在0°环境载荷下的运动小得多。这些差异将会影响动力定位系统推进器的功率消耗,待命就位状态下,驳船各推进器的功率消耗情况如表3所示。
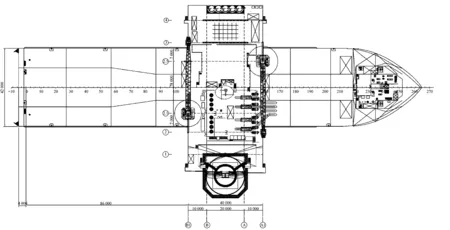
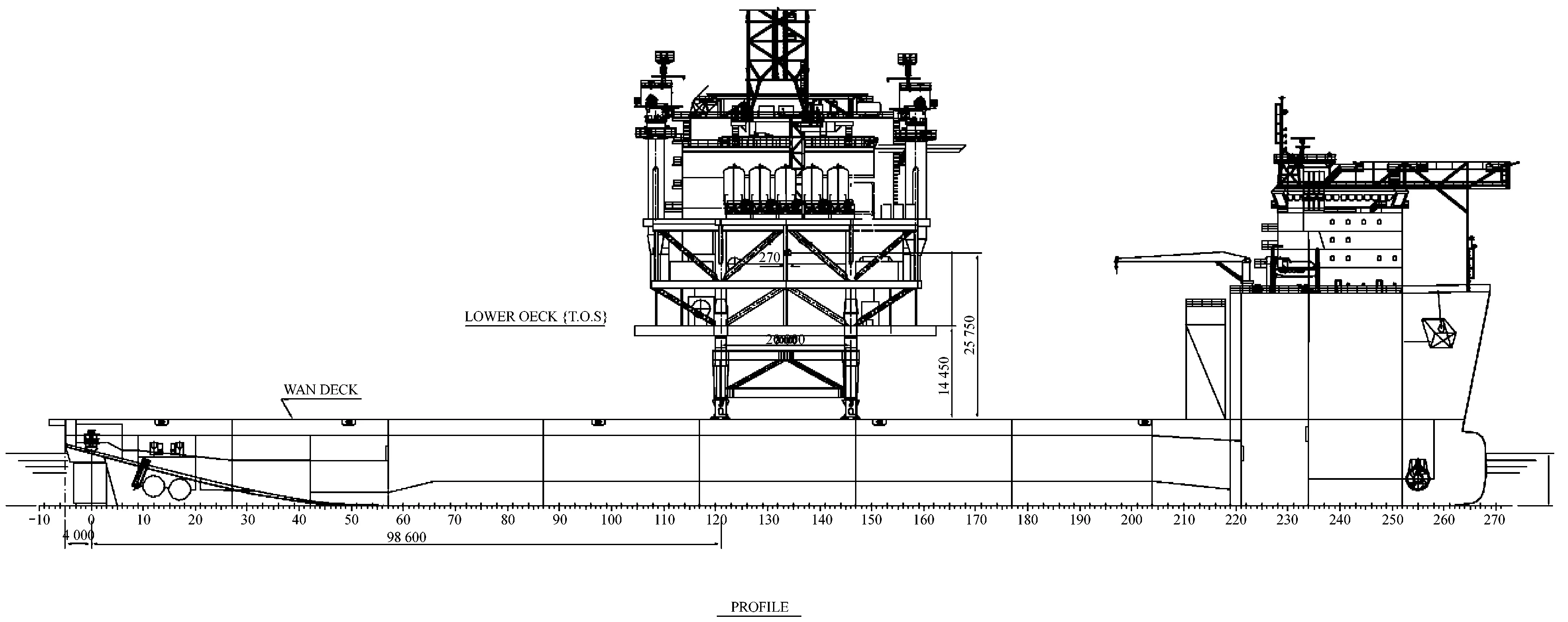
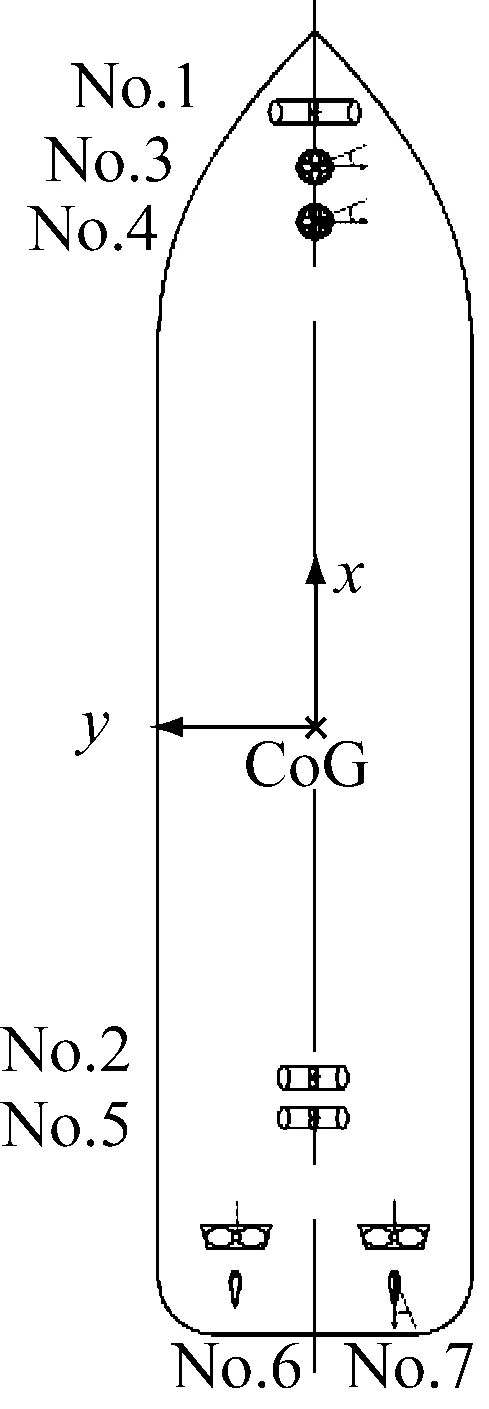
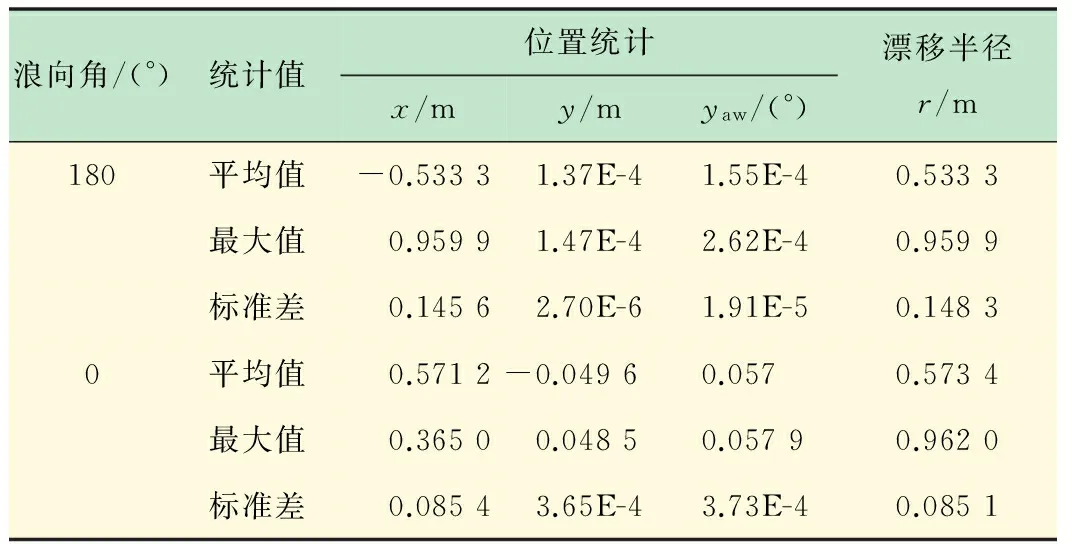
表2 待命就位时域模拟的位置统计
综合表2和表3可知,由于在180°环境载荷作用下时,驳船的艏摇和横荡运动几乎为零,因此负责提供侧向力和艏摇力矩的1、2和5号推进器几乎不工作,功率趋近于0;而在0°环境载荷下,1、2和5号推进器仍会产生相应的推力和转矩以平衡驳船的艏摇和横荡运动。总体而言,驳船实现动力定位所需的推力主要由两个全回转推进器和两个主推提供,驳船动力定位系统在0°环境载荷下的功率消耗要稍大于180°环境载荷下的功率消耗。
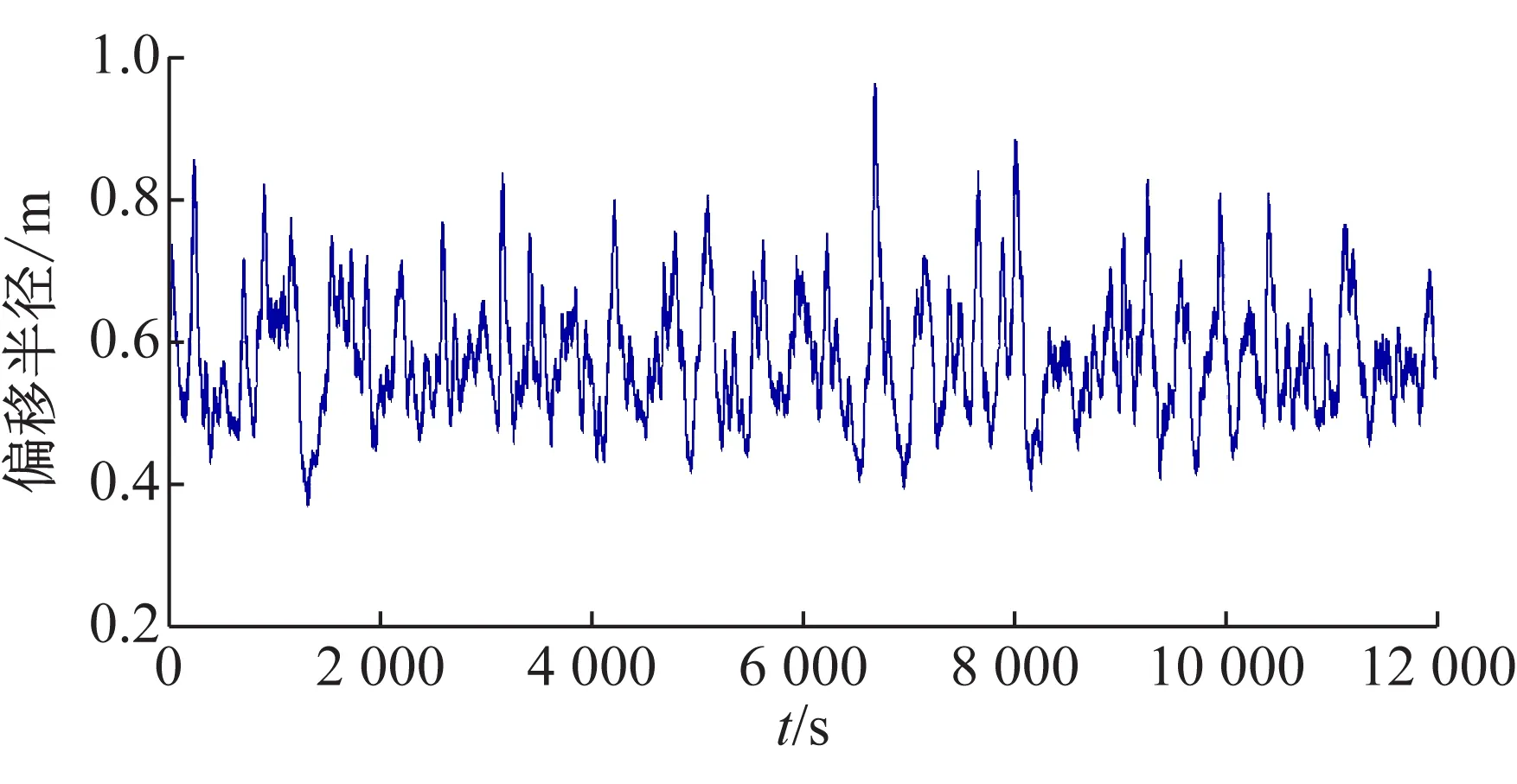
图4 180°环境载荷下时域模拟的偏移半径
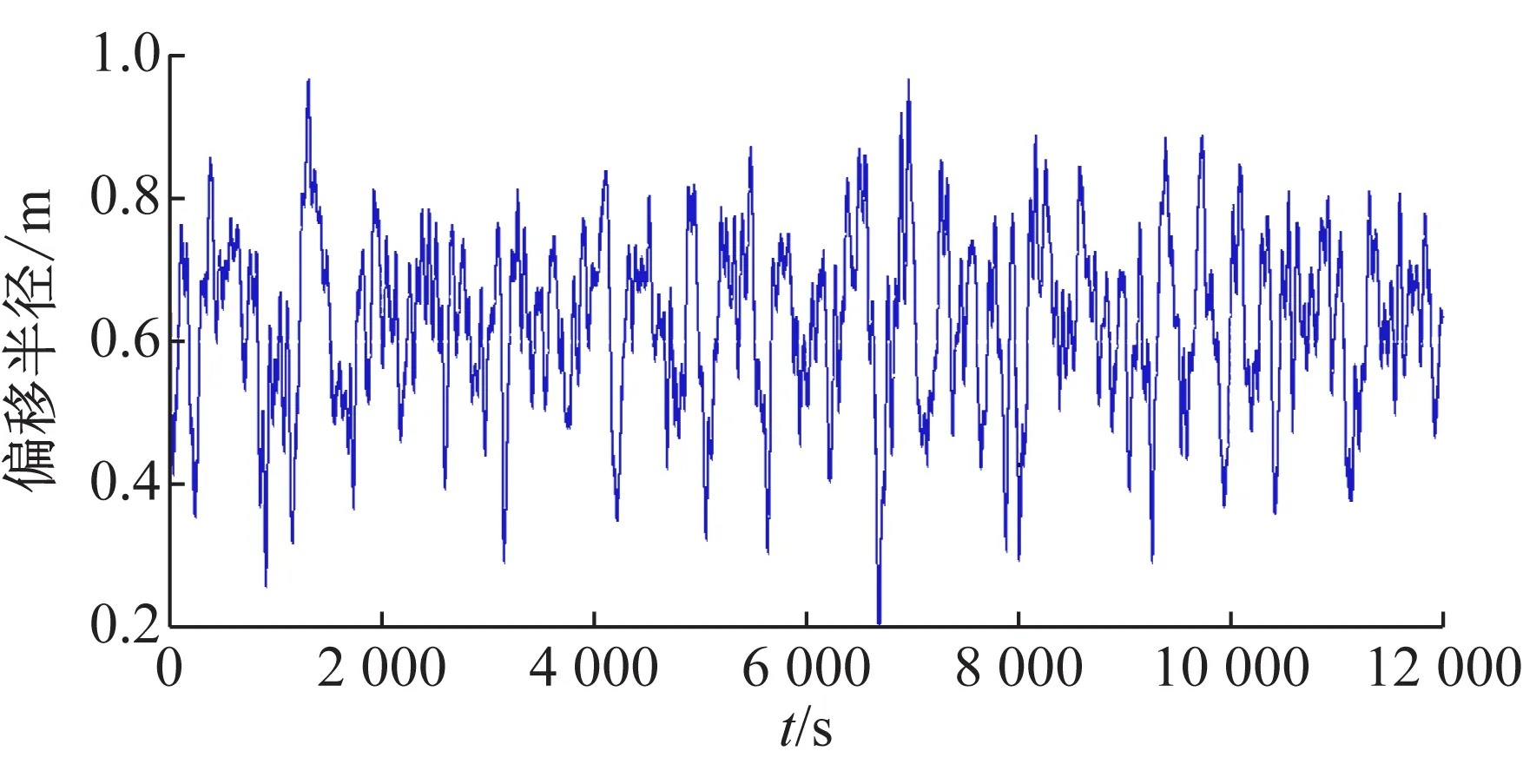
图5 0°环境载荷下时域模拟的偏移半径
4 结 语
本文采用自主编写的动力定位时域模拟程序,对某动力定位浮托安装船在180°和0°环境载荷作用下的待命就位工况进行了时域模拟研究。结果表明,该动力定位浮托安装船能够在180°和0°环境载荷作用下实现待命就位,主要推力由两个全回转推进器和两个主推提供,且在180°环境载荷作用下待命就位时,能避免驳船的推进器倒车,取得更好的定位精度和较小的功率消耗,是最佳的待命就位方向。
[1] 金 秋, 张国忠. 世界海洋油气开发现状及前景展望[J]. 国际石油经济, 2005, 13(3):43-44.
[2] 赵志高, 杨建民, 王 磊,等. 动力定位系统发展状况及研究方法[J]. 海洋工程, 2002, 20(1):91-97.
[3] 任宪刚, 倪 伟, 徐永生. 半潜式钻井平台动力定位模型试验分析[J]. 中国海洋平台, 2011, 26(2): 37-42.
[4] 陈黎明, 陈国明, 金 辉, 等. 深水钻井平台动力定位失效风险分析与控制[J]. 中国海洋平台, 2012 (2): 32-36.
[5] 邱荷珍. 基于动力定位方法的浮托安装时域模拟与模型试验研究[D]. 上海:上海交通大学, 2015.
[6] 白雪平, 李 达, 范 模, 等. 惠州 25-8 DPP 组块动力定位浮托安装研究[J]. 海洋工程, 2014(5): 010.
[7] 金 鑫, 王 磊, 徐胜文. 切换控制在动力定位系统中运用的研究与进展[J]. 实验室研究与探索, 2014, 33(12): 12-15.
[8] Woolsey C A. Review of marine control systems: Guidance, navigation, and control of ships, rigs and underwater vehicles[J]. Journal of Guidance, Control, and Dynamics, 2005, 28(3): 574-575.
[9] Fossen T I. Handbook of marine craft hydrodynamics and motion control[M]. John Wiley & Sons, 2011.
[10] Skejic R, Faltinsen O M. A unified seakeeping and maneuvering analysis of ships in regular waves [J]. Journal of Marine Science and Technology, 2008, 13(4): 371-394.
[11] 刘应中,廖国平. 船舶在波浪上运动理论[M]. 上海 上海交通大学出版社,1987
[12] Cummins W E. The Impulse Response Function and Ship Motions[J]. Schiffstechnik, 1962, 9:101-109.
[13] Sørensen A J. A survey of dynamic positioning control systems[J]. Annual Reviews in Control, 2011, 35(1): 123-136.
·名人名言·
大学的荣誉,不在它的校舍与人数;而在于它一代一代人的质量。
——柯南特
Time Domain Simulation in Standby Stage of Float-overs Installation Executed by Dynamic Positioning System
XUNan1,QINLicheng1,WANGLei2
(1. Offshore Oil Engineering Co., Ltd., Tianjin 300461, China; 2. Collaborative Innovation Center for Advanced Ship and Deep-Sea Exploration(CISSE), Shanghai Jiaotong University, Shanghai 200240, China)
Dynamic positioning assisted float-over installation can largely reduce the price of installation depending on the self-propelled barge and its strong load capacity, thus is widely used in industry. Standby is an important preparing period before the float-over installation begins. Based on the measured position and power consumption during this period, it can be decided whether the installation begins or not. In this paper, a time domain simulation program is developed to investigate the standby period of the float-over installation. The simulation results indicate that the float-over barge can be dynamicly positioned under 180°and 0° environmental loads, and thus give a reference to the practical operation.
dynamic positioning assisted ,float-over installation; standby; time domain simulation; model test
2016-05-10
国家自然科学基金项目(51179103)
许 南(1962-),男,北京人,高级工程师,现任海洋石油工程股份有限公司项目管理中心副总经理,主要从事海洋工程科研管理及项目管理工作。
Tel.:022-59899008; E-mail:xunan@mail.cooec.com.cn
P 751
A
1006-7167(2017)03-0004-05
