多模块网格存储系统的待命位策略研究
2022-03-21马云峰张忠明王鑫鑫
马云峰,张忠明,任 亮,王鑫鑫
(1.武汉科技大学 恒大管理学院,湖北 武汉430065;2.武汉科技大学 服务科学与工程研究中心,湖北 武汉 430065)
0 引 言
在信息化的进程不断加快,电子商务领域日益呈现出小批量、多品类、海量化、动态化、时效化特点的背景下,高效便捷的自动化仓储系统正不断应用于各个行业。但是,随着城市化进程的加深,昂贵的土地租金也制约了自动化仓储系统的发展,如何在既保持较高的取货效率的前提下,又能最大化提高仓储系统的空间利用率成为了自动化仓储系统发展面临的重要问题。随着信息技术的不断发展,智能机器人被不断应用于物流仓储领域。2012 年,亚马逊公司推出KIVA 机器人系统,由于其较高的取货效率,经过多年的发展,KIVA 机器人系统已经成为了当前物流行业的主流仓储系统之一。但是其空间利用率较低,近年来,国外提出了一种基于网格的存储系统,该系统具有极高的空间利用率,已经被逐渐应用于电商仓库。
待命位是指仓储机器人或堆垛机在任务空闲时的停留位置,对仓库的运行效率具有重要影响。Bozer 和White 是最早研究待命位的学者,他们通过将堆垛机放置在固定位置等待任务,提出了四种待命位策略。徐贤浩和郭依在Bozer 和White 研究的基础上,提出了三种待命位策略:(1) 返还货架后回到仓库下方中点处;(2) 返还货架后回到仓库右下角位置;(3) 还货架后直接停留在作业结束位置。王晨曦通过对仓储配送中心的周期订单情况及仓储机器人的运行状况的分析,对考虑待命位策略的平面作业模式仓储机器人调度问题进行创新性研究。Vanden Berg 将堆垛机待命位问题转换为设施选址问题,分别针对随机存储和分类存储策略构建了堆垛机到下一次操作指令位置的行走时间模型,为仓储系统运作和绩效评估提供了重要的意见。
到目前为止,有关自动化仓储系统的待命位策略研究大多是以KIVA 机器人系统或类KIVA 机器人系统为背景。尽管KIVA机器人系统的取货效率较高,但KIVA 机器人系统由于其系统布局的特点,空间利用率较低,在土地成本昂贵的今天,会导致较高的土地成本。
相比KIVA 系统,GUE 和KIM 提出的网格存储系统存储密度更高,但随着存储规模扩大,其取货效率较低。因此,提出了一种由多个网格存储系统构成的多模块网格存储系统,在徐贤浩和郭依提出的三种待命位策略的基础上,比较不同待命位策略下多模块存储系统与KIVA 系统的取货性能。
1 问题描述
本文提出的多模块网格存储系统是一种新型的自动化仓储系统,在该系统中,由机器人代替拣货员在通道内进行拣货,相对于传统的人到货的拣货模式,货到人的拣货模式较大地提升了仓库的拣货效率。该系统一次完整的取货周期如下:待命位的机器人接到订单指令后,从待命位出发将目标货架移动至出货口,有拣货员在出货口进行拣货,拣货完成后机器人将目标货架移动到原来的位置,最后机器人再回到待命位等待下一次取货命令。
多模块网格存储系统布局如图1 所示,类似于KIVA 系统,系统中也有多条横向通道和纵向通道,机器人在通道内行驶取货。白色网格代表空位,灰色网格表示货架,黑色网格表示目标货架,在系统的左下角和中点处有待命位点O、O,本文使用的三种待命位策略如下:(1) 返还货架后回到仓库右下角O( )位置;(2) 返还货架后回到仓库下方中点O( )位置;(3) 返还货架后直接停留在作业结束位置。
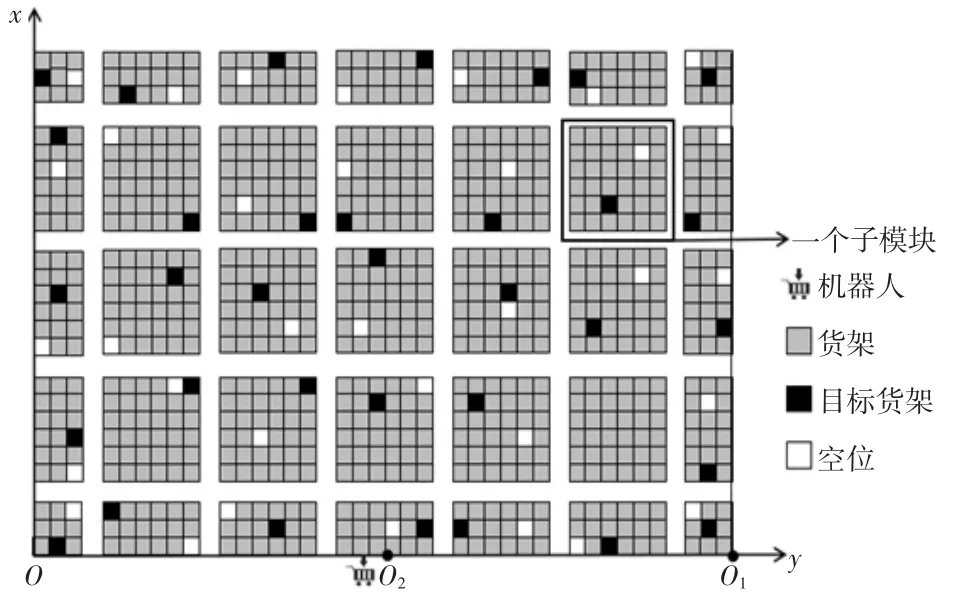
图1 多模块网络存储系统布局示意图
2 模型构建
2.1 模型假设及符号说明
为了便于建模求解,减小模型误差,本文的模型构建基于以下假设:(1) 有足够多的机器人数量,机器人数量的多少不作为影响取货时间的制约因素:(2) 机器人在取货系统中以恒定的速度行走,不考虑加减速的影响;(3) 采用随机储存策略,即每一个货架被拣选的概率都相等;(4) 忽略机器人托举和放下货架的时间;(5) 每个货架都只存同类物品:(6) 不考虑机器人的转向时间。
符号说明如表1 所示。
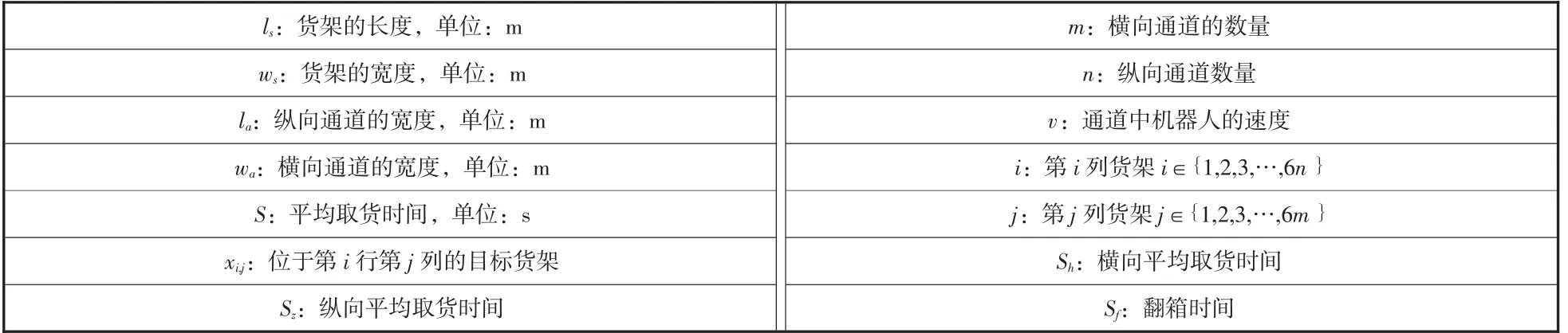
表1 符号说明
2.2 第一种待命位策略下的取货时间模型
在多模块网格存储系统的每个子模块中,外层货架靠近通道,机器人可以直接进行取货,而内层货架移动到通道要进行翻箱操作,则需考虑额外的翻箱时间。本文以子模块的大小为6×6(子模块有6 行6 列) 的多模块网格存储系统为例,分别用S、S表示机器人从待命位O到任一目标货架的横向移动时间、纵向移动时间,S表示翻箱时间。机器人一次完整的取货时间为目标货架的横向移动时间、纵向移动时间及翻箱时间之和,在第一种待命位策略下,机器人从待命位O点出发,取货完成后返还货架后回到待命位O,则机器人来回总计跑了4 次。第一种待命位策略下机器人的平均取货时间可表示为:

建立一个如图1 所示的直角坐标系,假设出货口也为O,O的坐标用(x,0 )表示,其中x=nl+6nl,用x表示目标货架x的坐标,其中i 表示位于第i 列货架(i={1,2,3,…,6n }),j 表示位于第j 行货架(j={1,2,3,…,6m }),机器人到目标货架的横向平均移动时间可表示为:

将式(2) 化简后可得:

每一行货架上的目标货架到出货口O的纵向平均取货时间都是相同的,因此目标货架x 到出货口O的纵向平均时间为:

将式(4) 化简后可得:



将式(3)、式(4)、式(6) 带入式(1),则可计算出第一种待命位策略下机器人的平均取货时间:

2.3 第二种待命位下的取货时间模型



由于待命位O的纵坐标没有发生改变,因此其横向平均取货时间与第一种策略相同,即:

将式(9)、式(10) 带入式(7),可得到第二种待命位策略下的平均取货时间为:

2.4 第三种待命位下的取货时间模型
在第三种待命位策略下,假设机器人的待命位为O,出货口也位于O。机器人一次完整的取货周期包括从待命位O移动到目标货架,托举目标货架到达取货点O,取货完成后将目标货架放回原位且机器人停留在货架下方。在整个取货过程中,机器人在待命位与目标货架之间移动了3 次,机器人的平均取货时间可以表示为:

在第三种待命位策略下,由于待命位仍位于O,因此机器人的横向平均取货时间、纵向平均取货时间与都与第二种策略相同,将式(9) 和式(10) 带入式(11),得到第三种待命位策略下机器人的平均取货时间:

3 数值实验与结果分析
3.1 模型验证
为了验证本文模型的有效性,根据对KIVA 系统的观察,假设基本参数如表2 所示:

表2 参数值
由于多模块网格存储系统布局的特点,增加通道数量能使系统面积随之增大,因此在实验1 中,通过改变m 和n 的数量,形成不同大小的系统规模,设置不同的场景1、2、3、4,对每个场景模拟100 次取货,每次在计算机中模拟M 次,取均值作为其平均取货时间,三种待命位策略的模型结果与仿真结果比较如表3 所示:

表3 模型结果与仿真结果比较
如表3 所示,随着模拟场景规模的增大,相对误差在不断减小,因为无论系统规模有多大,子模块的平均翻箱时间是恒定不变的。当系统规模较小时,平均取货时间较短,平均翻箱时间在总平均时间中占比较大,随着系统规模的扩大,平均取货时间变大,平均翻箱时间在总平均取货时间中的权重变小。模型结果与仿真结果的相对误差保持在0.83%~6.03%之间,相对误差较小,这表明建立的模型具有一定的有效性,且随着系统规模的扩大,模型的精度越高。
3.2 结果分析
多模块网格存储系统是一种新型的网格存储系统,对于其在不同待命位下的性能表现,没有具体的参考值,因此本文将多模块网格存储系统与目前流行的KIVA 系统相比较,在MATLAB 中进行模拟仿真,计算不同待命位策略下多模块网格存储系统与KIVA 系统的平均取货时间。在不同的系统面积下,使用不同待命位策略的两类系统平均取货时间如表4 所示。

表4 三种待命位下多模块网格存储系统与KIVA 系统平均取货时间比较
在表4 中,S、S、S分别表示不同待命位策略下多模块网格存储系统的平均取货时间,S、S、S分别表示不同待命位策略下KIVA 系统的平均取货时间,θ、θ、θ分别表示不同待命位策略下多模块网格存储系统相对于KIVA 系统的平均取货时间相对增长率,其计算方法以θ为例:

由于多模块网格存储系统需要翻箱,在同样的系统面积下,其平均取货时间要大于KIVA 系统,但随着系统面积的增大,三种待命位策略下多模块网格存储系统相对于KIVA 系统的取货时间增长率会变得越来越小。仅在60*60(系统长60m,宽60m) 系统布局中,其取货时间相对增长率就基本保持在10%以下,这表明随着系统面积的增大,KIVA 系统的取货时间优势越来越小。
系统的空间利用率、系统容量是由系统布局的特点决定的,待命位策略对其不产生影响。如图2、图3 所示,多模块网格存储系统的空间利用率保持在78%左右,KIVA 系统的空间利用率则在56%左右,多模块网格存储系统高出将近22%;在相同的系统规模下,多模块网格存储系统的系统容量要大于KIVA 系统,且随着系统规模的增大,系统容量之差会变得越来越大。
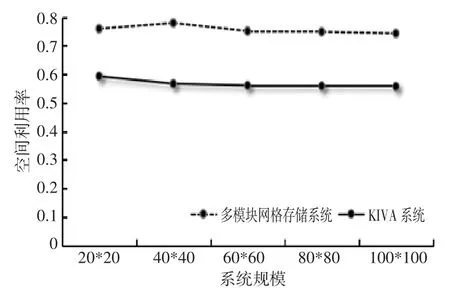
图2 空间利用率比较
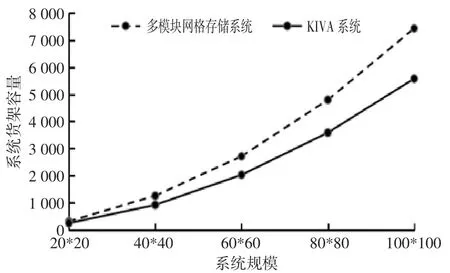
图3 系统容量比较
如表5 所示,100*100 规模下两种系统为例,多模块网格存储系统的平均取货时间比KIVA 系统慢3%左右,但是其空间利用率与系统容量却远远大于KIVA 系统。综合来看,在电子商务订单激增以及土地价格飞涨的今天,多模块网格存储系统相对KIVA 系统可能为企业能节省更多的成本。

表5 100*100 规模下两种系统的比较
此外,θ<θ<θ,且S<S<S,这表明在多模块网格存储系统中,与其他两种待命位策略相比,第三种待命位策略取货效率更高。
4 结 论
本文研究了一类多模块网格存储系统的待命位策略对平均取货时间的影响,针对不同的待命位策略建立了平均取货时间模型,在不同的待命位策略下,验证了模型的有效性,为后续对于多模块网格存储系统的研究提供一定的思路。此外,对于不同的待命位策略,将其与KIVA 系统相比较,研究发现,在第三种待命位策略下,多模块存储系统的取货效率最高。随着多模块网格存储系统规模的越大,其平均取货时间就越接近KIVA 系统,且空间利用率和货架容量远大于KIVA 系统。本文的研究只有一个待命位,未来研究或许可以用动态规划的算法,研究多个待命位同时取货,提升多模块网格存储的性能。