临近空间高超声速目标跟踪技术研究
2017-04-24李志飞王杰贵电子工程学院合肥230037
李志飞,王杰贵(电子工程学院,合肥 230037)
临近空间高超声速目标跟踪技术研究
李志飞,王杰贵
(电子工程学院,合肥 230037)
由于临近空间高超声速目标具有高速度、高机动的特点,对此类目标的跟踪是一个研究热点问题。提出了一种基于容积卡尔曼滤波的临近空间目标跟踪方法,首先分析临近空间高超声速目标的运动特性,建立了临近空间高超声速目标的运动模型。然后通过三站测得时差信息,实现了对临近空间目标的跟踪。最后,对提出的算法与扩展卡尔曼滤波和不敏卡尔曼滤波进行了综合性能对比分析,并通过仿真结果验证了该算法的实时性有效性。
临近空间目标,时差定位,非线性滤波
0 引言
临近空间高超声速目标(Near Space Hypersonic Target)是指可在临近空间长期飞行的目标。近年来,临近空间[1]高超声速目标的政治、经济和军事价值引起了各国的高度重视,并成为各个军事强国的研究热点。然而,由于临近空间高超声速目标具有高速度、高机动等特点,现有的跟踪雷达无法有效对其进行跟踪,因此,积极深入地开展对此类目标跟踪的关键技术研究已经迫在眉睫,有很多学者在其关键技术方面进行了研究。
文献[1]以HTV-2和X-51为研究目标,分别通过EKF、UKF、最小二乘卡尔曼和伪线性卡尔曼滤波算法进行比较,分析知最小二乘法不易出现滤波发散问题,它的算法稳定性比较高,但对距离预测不如UKF好,在速度和加速度方面不如伪线性算法好。文献[2]以高超声速目标为例,通过使用UKF算法、IMM-EKF算法、IMM-UKF算法分别进行对比仿真试验,结果表明IMM-UKF算法比其余2种滤波算法的精度更高,但在UKF算法公式中,状态按照扩维来处理,点的个数就会比较多,计算量大。文献[3]提出了一种基于不敏卡尔曼滤波的改进“当前”统计模型自适应滤波算法(ADE-UKF),该算法通过对加速度方差的自适应调整,较CS-UKF更符合实际,而且其收敛速度快于CS-UKF,但是其比例常数值的确定还有待进一步研究。文献[4]利用改进的CS-Jerk模型,以EKF算法为基础,同时利用强跟踪滤波器(STF)的思想引入时变渐消因子,在线调整状态预测误差协方差和相应的增益矩阵,对速度突变的高超声速目标有较好的跟踪性能。文献[5]通过对高超声速飞行器周期性跳跃式弹道的分析,提出了一种加速度均匀变化的运动模型(CDA),并与CV模型、CA模型交互,使用引入强跟踪滤波器的交互式多模型算法对周期性跳跃运动进行跟踪研究。该跟踪算法比经典IMM算法有更好的跟踪精度。文献[6]以X-51A为对象,根据当前状态实时地生成3个不确定角速度的模型集,针对时变的有向图实现自适应,通过与IMM-PF算法的比较,说明该算法实时性更强,抗干扰性好,但是其需要预先设定角速度的最大和最小值,存在误差。文献[7]提出了一种模糊交互式多模型算法,通过在算法中使用最小数量的子模型,将模型概率作为模糊输入来调整模型转换概率,该算法可以占用更少的计算资源。文献[8]提出用新息滤波减小观测噪声以修正模型概率更新过程的算法,在临近空间强杂波环境下具有较好的跟踪精度。但其模型之间的概率转移矩阵需要预先设定,如果不准确,这无疑会增大误差。
对于高超声速目标的跟踪问题,尽管很多学者为此付出了极大的努力,但针对高超声速目标的跟踪算法还比较少,对其进行跟踪无论在理论还是实践上都有较高的技术难度,是一个具有挑战性的问题。近年来使用采样方法近似非线性分布来解决非线性问题引起了人们极大的关注,对于高超声速目标的跟踪是一个典型的非线性滤波问题,本文基于此将容积卡尔曼滤波器[10-12](Cubature Kalman Filter,CKF)运用于跟踪过程中,为高超声速目标的跟踪提供一种新方法。该算法使用一组等权值的容积点集来计算非线性变换后随机变量的均值和协方差,将该算法与扩展卡尔曼滤波器(EKF)和不敏卡尔曼滤波器(UKF)进行了对比。该算法相比于EKF具有更优的非线性逼近性能,滤波精度提高,与UKF算法相比,在非线性较强的情况下具有更好的跟踪精度,而且该算法具有实现简单、运算时间短的优点。
1 时差定位基本模型
时差定位[13-14]系统是利用3个或多个已知位置的接收站来接受一个未知位置的目标辐射的电磁波,两个接收站采集到的信号到达时间差构成了一对双曲线,多条双曲线就能够确定目标的位置,本文采用3个接收站来接收目标辐射的电磁波。
图1 时差定位原理图
如图1所示,在笛卡尔坐标系下以3站时差定位为例,(x,y)为目标T的位置,S0(x0,y0)、S1(x1,y1)、S2(x2,y2)分别为主基站、副站1和副站2所在的位置。r0、r1、r2分别为目标到主基站、副站1和副站2的距离。距离差为Δri,i=1,2,定位方程为:
对上式进行化简得:
2 临近空间高超声速目标运动模型
本文采用“当前”统计模型[15-16],该模型认为,当目标正以某一加速度机动时,下一时刻的加速度值是有限的,且只能在“当前”加速度的邻域内呈现某种统计分布。假设状态向量,目标的状态方程为:

式中α为机动时间常数的倒数,即机动频率,通常α的经验取值为:当目标慢速转弯飞行时1/α等于60s,逃避机动时等于20 s,大气扰动时1/α等于1 s,T为采样周期。
目标的量测方程为:


其中
3 容积卡尔曼(CKF)滤波算法
针对一个非线性滤波问题,获得其最优解是有一定困难的,通常寻找满足贝叶斯准则的次优解来代替,CKF就是在高斯假设条件下解决非线性问题的一种新方法。
设离散时间非线性系统为:

其中k∈N是时间指标,X(k)∈Rn是k时刻的系统状态向量,fk:Rn×Rn→Rn是系统状态演化映射,而w(k)是n维过程演化噪声,Z(k)∈Rn是k时刻对系统状态的量测向量,hk:Rn×Rm→Rm是量测映射,而v(k)是m维量测噪声。其中fk和hk对其变元连续可微,过程噪声是一个零均值的独立过程,协方差阵为:

量测噪声是一个零均值的独立过程,协方差阵为:

高斯假设下,非线性滤波问题的核心简化为求解多维变量非线性函数与高斯密度函数乘积的积分问题。CKF使用2n个容积点的加权求和对高斯积分进行逼近,对任意分布的fk(x)有:
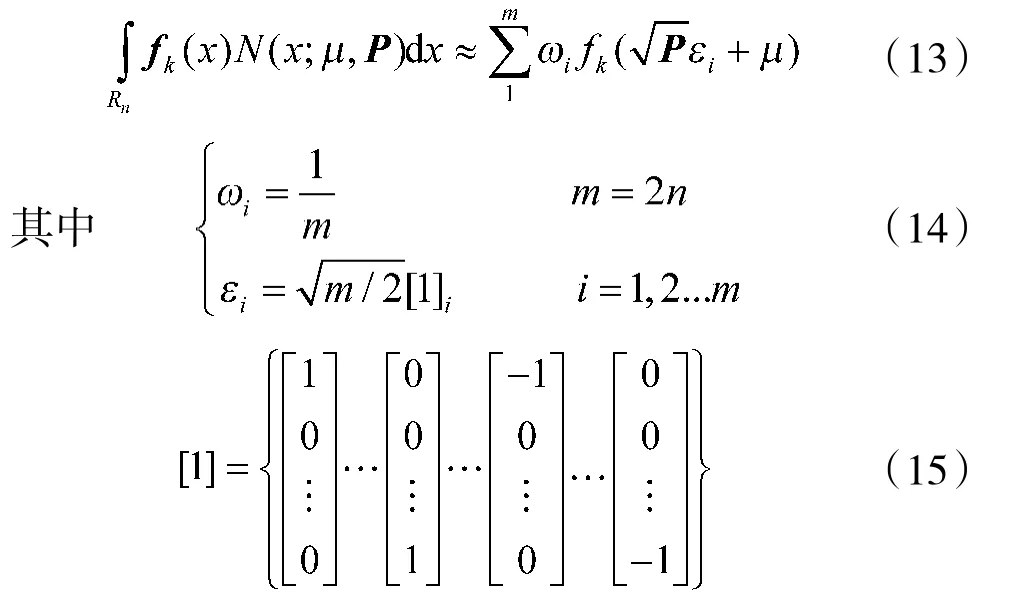
式中[1]i表示集合[1]的第i列。
CKF算法采用经典的卡尔曼滤波算法的基本思想,因此,它依然是一种递推算法,每一次滤波都进行时间和量测更新,针对非线性系统(10),假设k-1时刻的后验概率密度函数已知,CKF算法流程如下[12]:
1)时间更新

选择容积点为

其中m=2n,n为随机变量的维数。
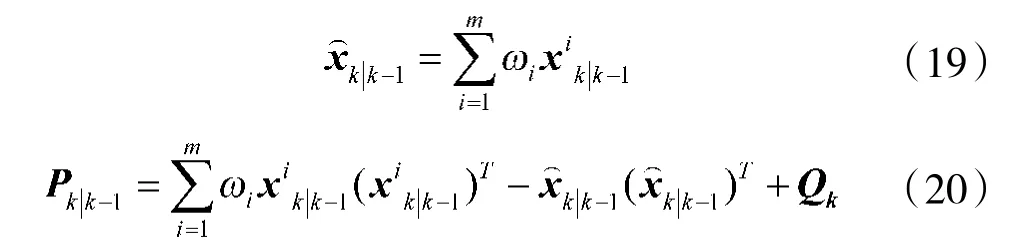
步骤2 对2n个容积点进行非线性状态方程传播后可得到:

步骤3 在k时刻状态的一步预测值和协方差阵的一步预测值为:
2)量测更新

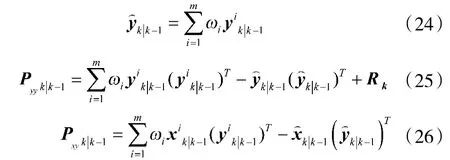
步骤5 对新选取的容积点进行非线性量测方程传播后,得到:

步骤6 在k时刻量测值的一步预测值、新息协方差阵、状态预测与量测预测的互协方差阵为:
步骤7 在k时刻得到量测值Z(k),状态更新值、协方差阵更新值、增益矩阵为:
4 仿真结果与分析
4.1 飞行轨迹设置
目标的初始状态X0=[60 000,500,0,25 000,0,0]T,目标运动过程历时450 s。在50 s~70 s做9°/s左转弯运动,且保持匀速,在120 s~180 s做3°/s右转弯运动,保持匀速,在220 s~232 s时间段做14°/s左转弯运动,保持匀速,在280 s~320 s做(ax,ay)= (40 m/s2,30 m/s2)的转弯运动,保持匀速,360 s~390 s时间段做(ax,ay)=(-60 m/s2,-55 m/s2)的转弯运动,保持匀速,在其余时间目标都进行匀速运动。目标的运动轨迹如图2所示。

图2 临近空间目标飞行轨迹
4.2 仿真结果分析
本文以“当前”统计模型对目标进行建模,其参数设置为:机动频率 1/α=20 s,axmax=70 m/s2,axmin= -100 m/s2,aymax=100 m/s2,aymin=-100 m/s2。采用3站测时间差得到量测数据,假设主基站的位置为(6× 104m,2.4×105m),副站1的位置为(10×104m,2.6×105m),副站2的位置为(12×104m,3×105m),在仿真过程中,假设雷达采样间隔T=1 s,目标到主基站和到副站1的时间差误差v1~N[0,(20×10-9)2],到主基站和到副站2的时间差v2~N[0,(20×10-9)2],过程噪声q~N[0,1],将CKF与EKF和UKF算法进行仿真对比,蒙特卡洛仿真次数M=300,本文利用3点初始化设置初始的状态向量,定义状态向量的均方根误差,其中i表示状态向量X的第i的状态值。
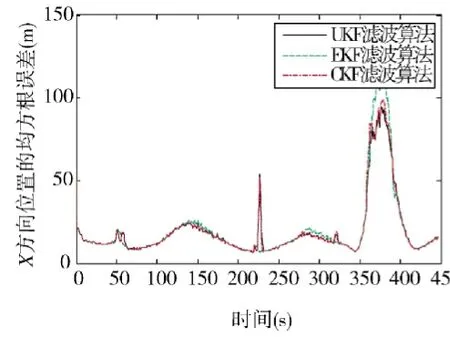
图3X方向位置的RMSE
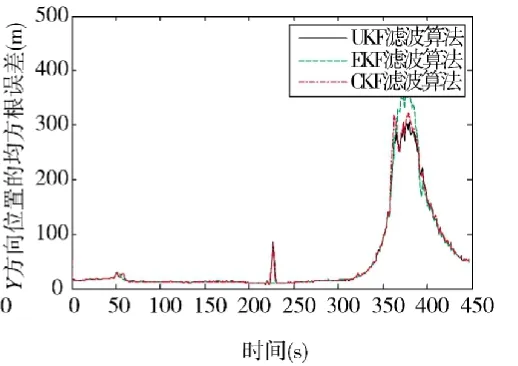
图4 Y方向的位置RMSE
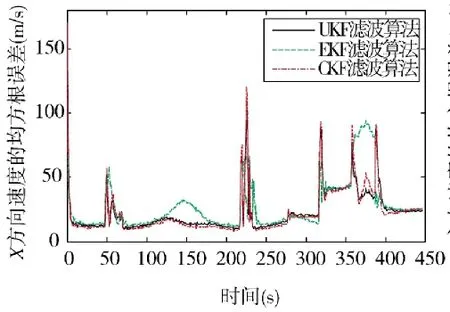
图5X方向速度的RMSE
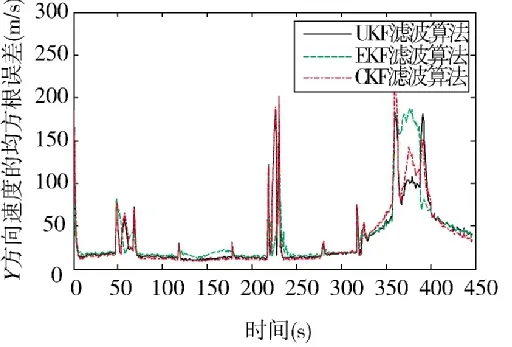
图6 Y方向速度的RMSE
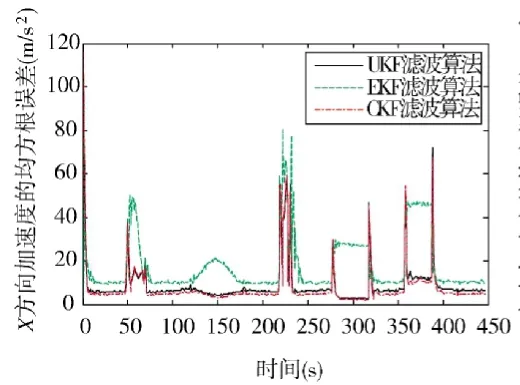
图7X方向加速度的RMSE
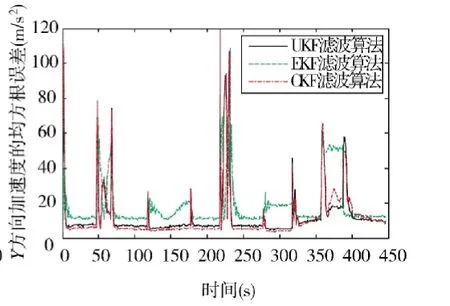
图8Y方向加速度的RMSE
图3~图8分别给出了3种算法在x和y方向目标位置、目标速度、目标加速度的均方根误差。由图示可以3种算法对目标位置的跟踪精度基本一致,这说明在非线性程度不大时,3种算法都具有较好的精度,但对目标的速度和加速度等状态进行估计时存在误差增大的问题,这是因为EKF算法对非线性函数进行泰勒级数展开式,只得到其一阶项作为函数近似,忽略了泰勒展开的高阶项,而且EKF需要计算Jacobian矩阵,在实际应用中可能难以获取。
对于UKF来说,该算法将状态向量通过Unscented变换进行滤波估计,性能总体优于EKF,而且不需要计算Jacobian矩阵,但随着状态向量维数的增加,Sigma点到中心点的距离会增大,Sigma点中关于的特征会减少,非局部效应增加,这对于其跟踪精度有一定影响,而且计算机的舍入误差会造成误差协方差阵和一步预测误差协方差阵非负定,从而造成滤波器的精度下降。
CKF也是通过确定性采样来近似非线性状态后验统计特性,但与UKF的工作原理有着本质的不同,CKF通过三阶Spherich-Radial容积规则来选取容积点,计算经过非线性变换后随机变量的均值和协方差,其参数具有自适应性,使它的使用范围大于UKF。但是CKF需要对误差协方差矩阵和误差的一步预测矩阵进行Cholesky分解,这需要保证矩阵的正定性,但在实际过程中由于计算机的舍入误差和误差的累积无法保证矩阵一直都是正定的,这对该算法的精度有所影响。
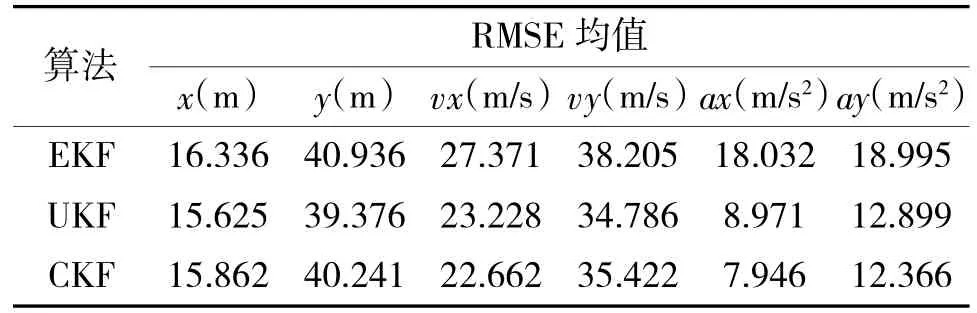
表1 3种算法的RMSE均值对比
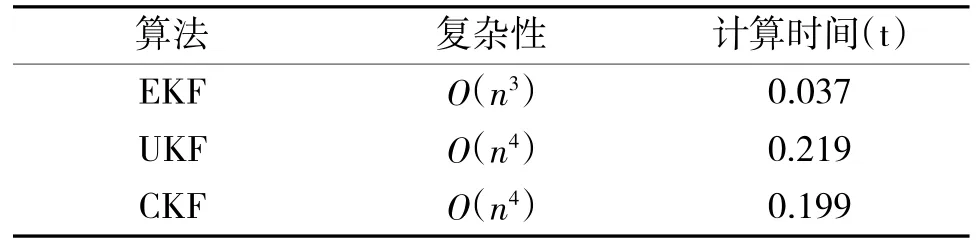
表2 3种算法的计算时间对比
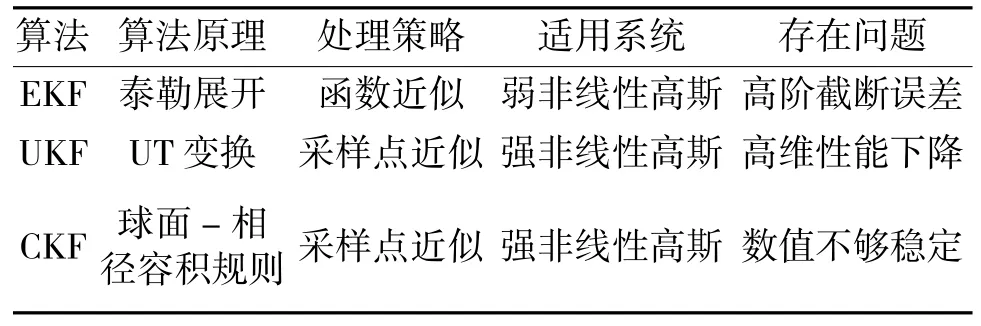
表3 3种算法性能对比
表1给出了3种算法RMSE均值的对比结果,数据显示CKF算法对于目标加速度的跟踪能力明显优于其他两种算法,对于位置和速度跟踪性能上与UKF相当,但是明显优于EKF,说明对于非线性强度大的情况下CKF具有良好的跟踪精度。表2的数据表明在计算时间方面,EKF最少,CKF次之,UKF时间最长,说明UKF和CKF在精度提高的同时由于协方差矩阵的Cholesky分解使其计算量也在加大,但CKF实现较为简单,在非线性不强、高斯的环境下EKF具有更好的实时性。表3对3种算法的原理、适用范围和存在问题进行总结。
5 结论
本文以非线性卡尔曼滤波算法为基础,以具有高机动性和高速度的临近空间目标为背景,引入一种新的滤波算法用于高超声速目标的跟踪,通过与EKF和UKF滤波算法进行对比,通过仿真验证了3种算法的跟踪精度和计算时间,并对算法性能进行比较,为高超声速目标的跟踪提供了新思路,对其跟踪有一定现实意义。
[1]何孝游.机动目标的临近空间被动跟踪及弹道预报[D].哈尔滨:哈尔滨工业大学,2014.
[2]秦雷,李君龙.基于多站交互式多模型算法跟踪临近空间目标[J].系统仿真学报,2014,26(10):2486-2491.
[3]李昌玺,毕红奎.一种临近空间高超声速目标跟踪算法[J].航天电子对抗,2012,28(4):10-13.
[4]樊友友.高速高机动目标跟踪算法及应用研究[D].西安:西安电子科技大学,2013.
[5]何广军,李彬彬.基于IMM模型的周期性跳跃运动高超声速飞行器跟踪算法[J].弹箭与制导学报,2015,31(1): 34-40.
[6]秦雷,李君龙,周荻,等.基于AGIMM的临近空间机动目标跟踪滤波算法[J].系统工程与电子技术,2015,37(5): 1009-1014.
[7]肖松,谭贤四.变结构多模型临近空间高超声速飞行器跟踪算法[J].红外与激光工程,2014,43(7):2362-2370.
[8]张越,何建华,王安龙,等.高超声速飞行器新息滤波交互式多模型跟踪算法[J].火力与指挥控制,2015,40(2): 50-52.
[9]关欣,赵静,何友.临近空间高超声速飞行器跟踪技术[J].四川兵工学报,2011,32(8):4-6.
[10]ARASARATNAM I,HAYKIN S.Cubature kalman filters [J].IEEE Trans on Automatic Control,2009,54(6): 1254-1269.
[11]ARASARATNAM I,HAYKIN S.Cubature kalman filters [J].IEEE Trans Automatic Control,2009,54:1254-1269.
[12]PESONEN H,PICHE R.Cubature-based Kalman Filters for Positioning[C]//2010 7th Workshop on Positioning Navigation and Communication(WPNC),2010:45-49.
[13]刘刚.分布式多站无源时差定位系统研究[D].西安:西安电子科技大学,2006.
[14]孙仲康.单多基地有源无源定位技术[M].北京:国防工业出版社,1996:162-166.
[15]何友.雷达数据处理及应用[M].二版.北京:电子工业出版社,2009.
[16]周宏仁,敬忠良,王培德.机动目标跟踪[M].北京:国防工业出版社,1991.
[17]QIN L,LI J,ZHOU D.Tracking filter prediction for non-ballistic target HTV-2 in nearspace[C]//Control and Decision Conference(CCDC),2015 27th Chinese IEEE,2015.
[18]韩崇昭.多源信息融合[M].北京:清华大学出版社,2010.
[19]YANG X,LU F,LIU G,et al.An improved passive location algorithm based on UKF[C]//Wireless Communication &Signal Processing.2009 WCSP 2009.international Conference onIEEE,2009:1-5.
[20]WU W S,SONG C L,WANG J H.Cubature gaussian particle filter for initial alignment of strapdown inertial navigation system[C]//2010 First International Conference on Pervasive Computing,Signal Processing and Applications,2010: 1196-1200.
[21]基于Cubature卡尔曼的强跟踪滤波算法[J].系统仿真学报,2014,26(5):1102-1107.
Near Space Hypersonic Target Tracking Technology Research
LI Zhi-fei,WANG Jie-gui
(Electronic Engineering Institute,Hefei 230037,China)
Since the near-space hypersonic targets have characteristics of high speed and high maneuverability,research on these kinds of targets is imminent.The algorithm based on the cubature Kalman filter is introduced to track the near-space hypersonic targets.At first,the moving characteristics of near-sapce hypersonic targets are analyzed,and the motion models of the near-sapce hypersonic targets are established in this paper.Then,the time differences of arrival of three stations to track the near-space hypersonic targets used.At last,the comprehensive performances are analyzed among introduced algorithm,the excented Kalman filter and unscented Kalman filter.Simulation results show the real time performance and effectiveness of presented algorithm.
near-space target,time difference positioning,nonlinear filtering
TP<957.51 class="emphasis_bold">957.51 文献标识码:A957.51
A
1002-0640(2017)03-0104-05
2016-02-14
2016-03-16
李志飞(1991- ),男,内蒙古呼和浩特人,硕士研究生。研究方向:临近空间高超声速目标跟踪。