目标识别跟踪系统的图像收集处理软件流程设计
2017-04-24孟丽洁陈文星张春晶北方自动控制技术研究所太原030006
孟丽洁,徐 锋,徐 燕,陈文星,张春晶(北方自动控制技术研究所,太原 030006)
目标识别跟踪系统的图像收集处理软件流程设计
孟丽洁,徐 锋,徐 燕,陈文星,张春晶
(北方自动控制技术研究所,太原 030006)
详细介绍了目标识别跟踪系统中图像收集处理软件的设计流程。首先介绍了目标识别跟踪系统,然后从视频图像显示到目标图像获取和发送的整个流程进行详细阐述,并针对流程节点中获取目标图像的两种方式加以深入研究。
目标识别跟踪系统,图像收集处理软件,目标图像
0 引言
近年来局部战争趋势显示,在未来高技术战争的大环境下,军事装备向无人化与智能化演变,军用传感器平台在战争中将占有重要地位,因为其自身灵活、不易被发现等特点大大降低了作战部队的风险,极大地提高了作战能力和战场应变能力。
目标识别跟踪系统的功能是迅速捕获、跟踪、瞄准其所在区域内的静止或移动目标,它在军事、反恐防暴和民用方面都具有广阔的应用前景,得到了世界上许多国家的极大关注。在军事领域,它可以用于敌情侦查、地方目标跟踪、打击引导等;在反恐防暴行动中,它能巡逻一个地区,辨认可疑活动,发现跟踪恐怖分子;在民用交通方面,它可以巡视某一区域,及时发现各种交通隐患或监控交通状况,跟踪逃逸车辆;在人员营救方面,它可以用于搜索伤员,在山林地带搜寻迷失登山者。
本文设计的图像收集处理软件应用于目标识别跟踪系统,实现对目标识别跟踪相关技术的探究。
1 目标识别跟踪系统
目标识别跟踪系统由传感器平台、无线传输设备、图像处理板、传感器控制平台、图像监控平台组成(如下页图1),研究多尺度的地面目标检测,借鉴人类视觉系统信息处理机制,构建基于视觉选择注意机制的地面目标检测与识别框架,实现对目标的实时精确监视与状态感知。
其中,传感器平台实时采集视频图像,并根据指令进行目标跟踪;无线传输设备分为数传设备和图传设备,数传设备传输各种指令、状态信息,图传设备传输实时视频图像信息;图像处理板运行目标识别跟踪软件,目标识别跟踪软件运用图像配准技术、目标跟踪技术以及DSP技术实现对视频图像中目标的识别、匹配与跟踪计算;传感器控制平台运行云台操控软件,接收传感器平台的实时位置信息、状态信息、根据平台位置和目标在图像中的相对位置计算传感器相应参数进而控制其跟踪目标;图像监控平台运行图像收集处理软件,图像收集处理软件运用DirectX显示技术、BMP图像格式与RAW图像格式转换技术、目标图像提取技术以及UDP传输等技术,实现对目标图像的实时监控、目标图像提取、与图像处理板进行信息交互、与传感器控制平台进行信息交互等功能。
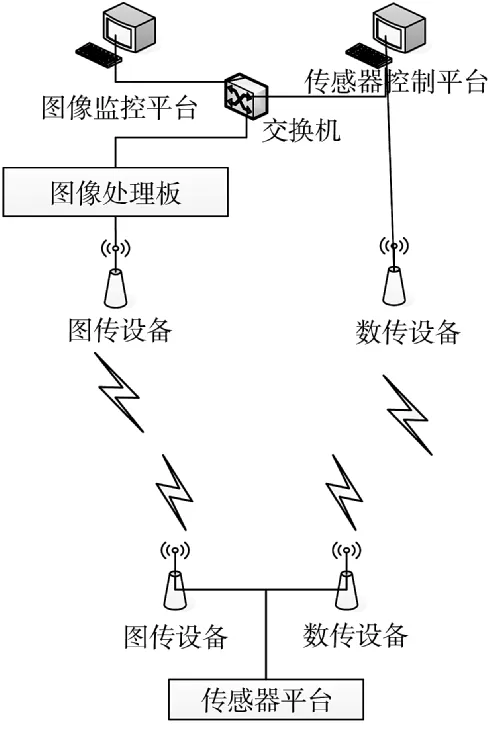
图1 目标识别跟踪系统组成
目标识别跟踪系统跟踪目标控制流程如图2,传感器平台实时采集、发送视频图像,图像处理板接收视频图像,如果存在目标图像,则进行目标识别、匹配与跟踪计算,将跟踪结果添加到视频图像信息中发送给图像监控平台;如果不存在目标图像,图像处理转换图像格式后直接发送给图像监控平台。图像监控平台实时接收、显示视频图像与跟踪结果,用户可操作图像收集处理软件获取当前帧图像,在当前帧图像中提取目标图像后发送给图像处理板,图像处理板从下一帧视频图像开始重新进行目标识别、匹配与跟踪计算。图像监控平台将图像跟踪信息中的目标位置信息发送给传感器控制平台,传感器控制平台根据传感器平台当前位置、状态信息计算移动控制参数控制传感器平台对目标进行跟踪。本文重点介绍图像收集处理软件设计流程[1-4]。
2 图像收集处理软件
图像收集处理软件运用DirectX显示技术、BMP图像格式与RAW图像格式转换技术、目标图像提取技术以及UDP传输等技术,实现对目标图像的实时监控、目标图像提取、与图像处理板进行信息交互、与传感器控制平台进行信息交互。软件流程如图3。
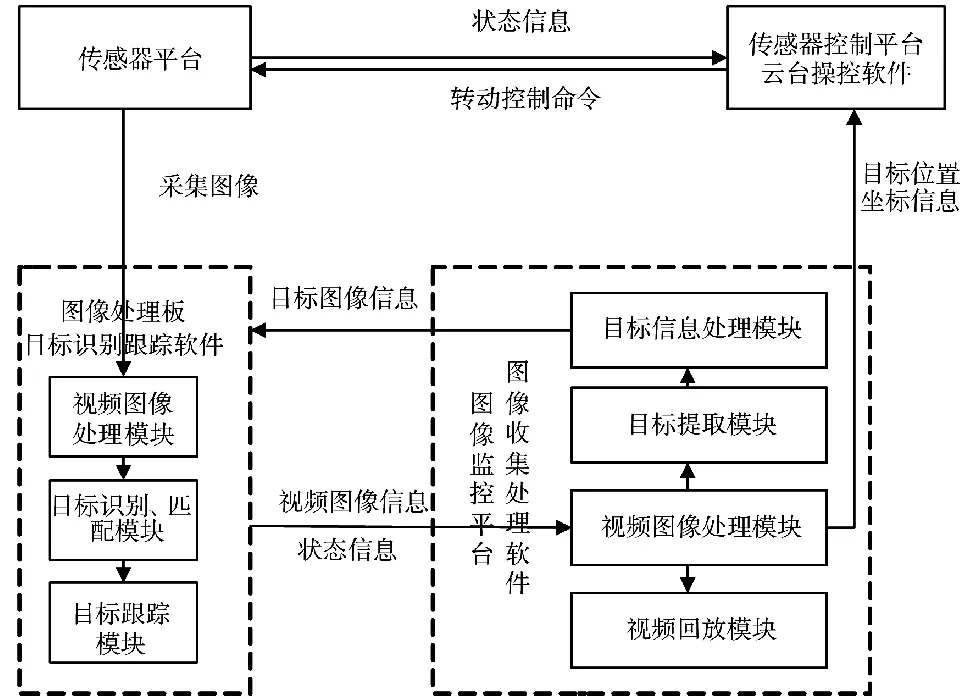
图2 目标识别跟踪系统跟踪目标控制流程图
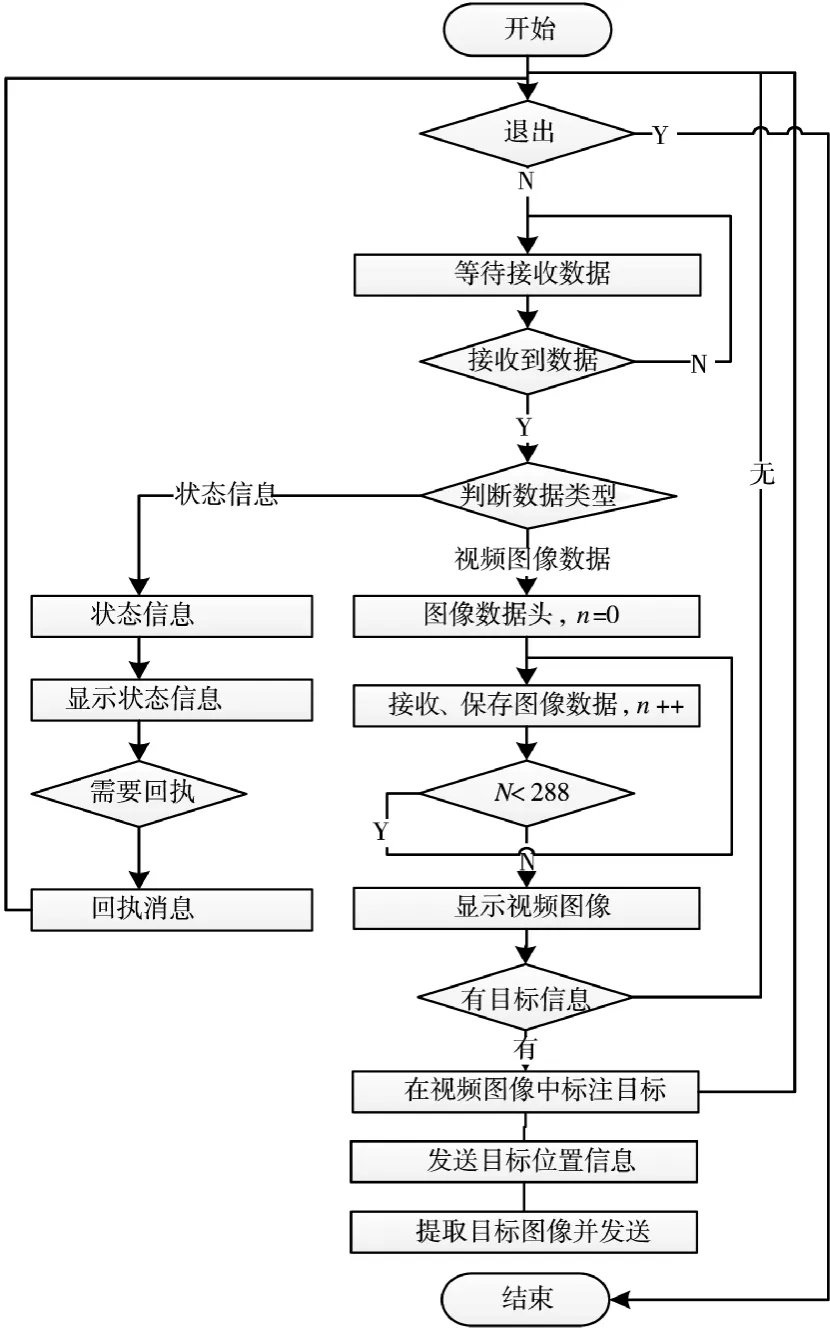
图3 图像收集处理软件流程图
其中,提取目标图像有两种方式:提取当前帧图像中的目标图像和提取历史视频图片中的目标图像。其中,提取当前帧图像中的目标图像指从实时接收、显示的传感器平台侦查视频图像中提取,而提取历史视频图片中的目标图像指从保存的历史视频图片中提取。
2.1 提取当前帧图像中的目标图像流程设计
传感器平台图像收集处理软件实时接收、显示传感器平台侦查视频图像,可获取当前帧图像并进行放大显示,从当前帧图像提取目标图像发送给图像处理板进行目标识别、匹配与跟踪计算,流程如图4。
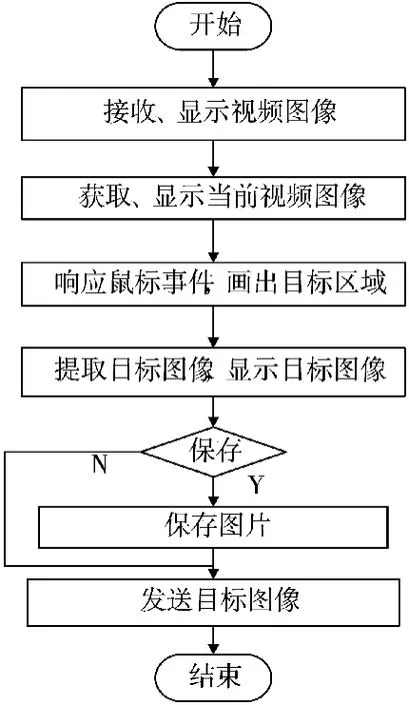
图4 提取当前帧图像中的目标图像流程图
具体过程如下:
1)图像收集处理软件实时接收、显示视频图像;
2)获取当前帧图像,并进行显示。采用微软公司创建的多媒体编程接口DirectX技术实现视频图像实时显示。
3)在当前帧图像中提取目标图像,并进行显示。鼠标光标移动到视频图像上,按住鼠标左键拖动鼠标,选择目标图像区域,提取此区域目标图像并进行显示。
4)使用UDP协议向图像处理板发送目标图像。
5)图像处理板接收到目标图像后进行目标识别、匹配与跟踪,并将跟踪结果添加到图像信息中发送给图像收集处理软件。
6)图像收集处理软件接收视频图像,判断目标跟踪信息,在视频图像中标注目标具体位置。
提取当前帧图像中的目标图像特征部分源代码如下:
pRAWBufConv=new BYTE[414720];
for(int i=0;i<576;i++)
{
for(int j=0;j<720;j++){pRAWBufConv[(576-1-i)*720+j]=recvBuf[i*720+j];}
}
memcpy(CurentShowPictureBuf,CurentPicture-Buf,414720);
((CTargetApp*)AfxGetApp ())->do_blending (CutPictureBuf,CutPictureWight,CutPictureheight,
GetDlg Item(IDC_STATIC_TARGET)->m_hWnd);//实现对图像的显示
2.2 提取历史视频图片中的目标图像流程设计
图像收集处理软件实现从计算机中选取、打开、显示任意一张历史视频图像,并从中提取目标图像进行显示、保存与发送,流程如图5。
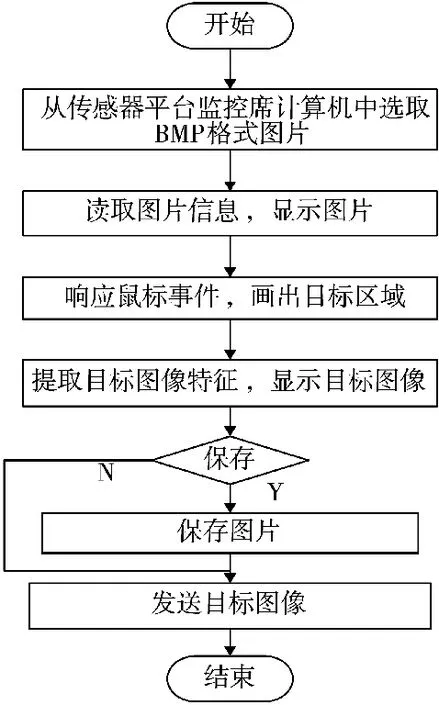
图5 提取历史视频图片中的目标图像流程图
具体过程描述如下:
1)从计算机中选取历史视频图片,界面跟踪视频窗口显示该图片。
2)在该图片中提取目标图像,并进行显示。鼠标光标移动到显示的图片上,按住鼠标左键拖动鼠标,选择目标区域,提取、显示此区域的目标信息。
3)向图像处理板发送目标图像。由于图像处理板处理RAW格式图像,需要将BMP格式的目标图像转化为RAW格式后再进行发送。
4)图像处理板接收到目标图像后进行目标识别、匹配与跟踪,将跟踪信息添加到视频图像信息中发送给图像收集处理软件。
5)图像收集处理软件接收视频图像,判断目标跟踪信息,在视频图像中标注目标具体位置。
部分源代码如下:
BMPhBitmap=m_picture.CopyScreenToBitmap();//拷贝屏幕固定区域
BITMAP pBitMap;CBitmap map;
map.Attach(BMPhBitmap);//从HBITMAP获得位图
map.GetBitmap(&pBitMap);
CutPictureWight=pBitMap.bmWidth;//得到图像宽度
CutPictureheight=pBitMap.bmHeight;//得到图像高度
str.Format("%d",CutPictureWight);
m_KD.SetWindowText(str);
str.Format("%d",CutPictureheight);
m_GD.SetWindowText(str);
int BMPsize=0;
if(pBitMap.bmBitsPixel==32){BMPsize =CutPictureWight*CutPictureheight*4;}
else BMPsize = CutPictureWight*CutPictureheight*3;
BYTE*pBuff=new BYTE[BMPsize];memset(pBuff,0,sizeof(BMPsize));map.GetBitmapBits(BMPsize,pBuff);//提取图像数据
memset(CutPictureBuf,0,414720);
if(pBitMap.bmBitsPixel==32)//32位、24位BMP格式转换为8位RAW格式{
for(i=0;i<CutPictureWight*CutPictureheight;i++){CutPictureBuf[i]=pBuff[i*4]*0.299+pBuff [i*4+1]*0.587+pBuff[i*4+2]*0.114;}
}
if(pBitMap.bmBitsPixel==24)
{
for(i=0;i<CutPictureWight*CutPictureheight;i++){CutPictureBuf[i]=pBuff[i*3]*0.299+pBuff [i*3+1]*0.587+pBuff[i*3+2]*0.114;}
}
3 实验结果
试验准备:传感器平台、无线传输设备、图像处理板加电启动,传感器控制平台启动云台操控软件,图像监控平台启动图像收集处理软件。
试验1:提取当前帧图像中的目标图像进行目标跟踪
试验过程:传感器平台采集实时视频图像;图像监控平台图像收集处理软件获取当前帧视频图像,提取目标图像并发送给图像处理板,如图6;图像处理板识别、匹配与跟踪成功后,图像收集处理软件向云台操控软件发送目标在图像上的位置信息,云台操控软件控制传感器平台自动跟踪目标,跟踪结果如图6。
试验结果:地面目标轿车的运动速度一定的情况下,传感器平台对其跟踪效果较好;图像收集处理软件能够正确显示实时视频图像及其跟踪结果,能够获取当前帧图像并进行放大显示,能够提取目标图像并进行发送。
试验2:提取历史视频图片中的目标图像进行目标跟踪
试验过程:传感器平台采集实时视频图像;图像监控平台图像收集处理软件打开历史视频图片,提取目标图像并发送给图像处理板,如图7;图像处理板识别、匹配与跟踪成功后,图像收集处理软件向云台操控软件发送目标在图像上的位置信息,云台操控软件控制传感器平台自动跟踪目标,跟踪结果如图7。

图6 提取当前帧图像中的目标图像进行目标跟踪
试验结果:地面目标轿车的运动速度一定的情况下,传感器平台对其跟踪效果较好;图像收集处理软件能够正确显示实时视频图像及其跟踪结果,能够获取历史视频图片中并进行显示,能够提取目标图像并进行发送。

图7 提取历史视频图片中的目标图像进行目标跟踪
4 结论
本文描述了目标识别跟踪系统中图像收集处理软件的工作流程,对两种不同来源提取目标图像特征进行了详细描述,实验结果显示基于目标识别跟踪系统的图像收集处理软件设计合理,功能正确,有实际应用价值。
[1]卢胜伟.基于图像处理的目标识别跟踪研究[D].长春:长春理工大学,2008.
[2]刘军.基于DSP的运动目标识别与跟踪[D].无锡:江南大学,2012.
[3]刘林锋,郭平,赵娟,等.无线传感器网络中基于移动sink最优路径的数据收集策略[J].四川兵工学报,2015,35 (1):118-121.
[4]张博龙.无人飞行器目标跟踪算法研究[D].长春:长春理工大学,2014.
[5]解晓萌.复杂背景下运动目标检测和识别关键技术研究[D].广州:华南理工大学,2012.
Design of Image Collection and Processing Software Process Based on Target Recognition and Tracking System
MENG Li-jie,XU Feng,XU Yan,CHEN Wen-xing,ZHANG Chun-jing
(North Automatic Control Technology Institute,Taiyuan 030006,China)
This paper introduces the design process of image collection and processing software in target recognition and tracking system.At first this paper introduces target recognition and tracking system.Then the whole process of video image acquisition to target image acquisition and transmission is described in detail,and aims at the process nodes in-depth study,which to obtain the target image in two ways.
target recognition and tracking system,image collection and processing software,target image
TP<317.4 class="emphasis_bold">317.4 文献标识码:A317.4
A
1002-0640(2017)03-0166-04
2016-02-05
2016-03-07
孟丽洁(1988- ),女,山西太原人,在读硕士。研究方向:系统工程。