330 MW机组给水自动控制系统的优化与应用
2017-04-21姜烈伟
姜烈伟
(广东粤电集团有限公司韶关发电厂,广东韶关512132)
330 MW机组给水自动控制系统的优化与应用
姜烈伟
(广东粤电集团有限公司韶关发电厂,广东韶关512132)
以某电厂330 MW机组的给水系统为研究对象,针对给水自动不能投入以及汽包虚假水位导致MFT误动的现象,通过检查外部测量系统以及DCS系统逻辑,找出了导致给水控制系统不能投入自动的原因:压力补偿经验曲线和PID调节参数设置不合理、水位测量零位定义有偏差。根据以上原因分析,修正汽包水位压力补偿经验曲线,重新校对就地汽包水位计中心,并优化PID参数。方案实施完成后,通过实际运行,给水控制系统能够满足不同负荷的要求,使给水自动投入率得到大幅提高,显著提升了机组的自动化水平,同时避免了由于汽包虚假水位信号而引起的机组跳闸,保证了机组安全运行。
给水控制;虚假水位;压力补偿;安全性评价;PID;汽包
0 引言
汽包水位是锅炉运行中的重要监控参数,它反映锅炉蒸汽负荷与给水量之间的平衡关系,给水控制系统的正常运行是保证锅炉和汽轮机安全运行的重要条件。给水控制系统是一个能在各种不同的工况下,均能实现给水自动控制的系统,而且从一种控制状态到另一种控制状态的判断、转换及故障检测也由系统本身完成[1]。因此,锅炉给水控制系统的结构越来越复杂,对其可靠性要求也越来越高。随着锅炉容量增大和参数提高,汽包容积相对缩小,而锅炉蒸发受热面的热负荷显著提高,加快了负荷变化时水位变化的速度,因而对给水控制提出了更高的要求。
本文以某电厂330 MW机组的给水系统为对象,通过对给水自动的问题分析,在优化汽包水位压力补偿经验曲线的基础上,校对就地汽包水位计中心,并重新设置了PID(Proportion Integration Differentiation)参数,于2014年8月,完成了给水自动系统的相关修改方案,运行至今,给水自动能够满足不同负荷的要求,消除了虚假水位现象,为机组的稳定运行提供了有力的保障。
1 系统简介
某发电厂330 MW燃煤机组所配锅炉为东方锅炉厂根据引进的美国福斯特·惠勒(FOSTER WHEELER)公司技术,制造的DG1025/18.2-II10型燃煤炉,该炉为亚临界参数、单汽包自然循环、双拱炉膛、一次中间再热、尾部双烟道、露天布置、全钢结构、全悬吊结构、固态排渣方式锅炉。汽轮机采用由东方汽轮机有限公司制造的N330-16.67/537/537-4型亚临界、中间再热、高中压合缸、双缸双排汽单轴布置凝汽式汽轮机;配备3台给水泵为上海电机厂生产的型号DG600——240、级数6、扬程2 381 m、轴功率4 354 kW、转速5 410 r/min的6 000 V电动泵。
该机组给水控制系统为三冲量给水自动调节,调节器接受的三个信号为:汽包水位、主汽流量、给水流量,给水控制系统通过调整给水泵转速,控制锅炉给水流量,维持汽包水位。给水主调以蒸汽流量为前馈变量,汽包水位实际值与设定值偏差进行PID调节[2];给水主调输出作为副调设定值,与副调反馈流量偏差进行PID闭环调节,输出给水控制指令。
2 现状调查
通过查阅2014年4~6月份间的DCS(Distributed Control System,分散控制系统)历史数据和《运行操作记录》等有关资料,得知机组负荷率只有在30%~85%区间,给水自动才能正常投入,而机组负荷DCS历史数据显示,4~6月间机组除了机组启停及调峰的小部分时间外,机组的负荷率都在85%以上。图1为4~6月给水自动投入率(自动投入率=给水调节投入自动的时间/机组并网运行的时间)的统计数据。
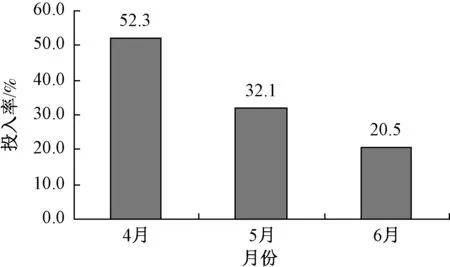
图1 4~6月给水控制系统自动投入率
由图1中数据可以计算出,给水自动投入率的月平均值为34.9%,而火力发电厂安全性评价明确规定给水自动投入率要达到95%以上,显然,给水控制系统已经不能满足机组安全、经济运行的要求。
另外,在查找《设备缺陷记录》后,绘制出导致给水控制不能投入自动的故障统计表,如表1所示。
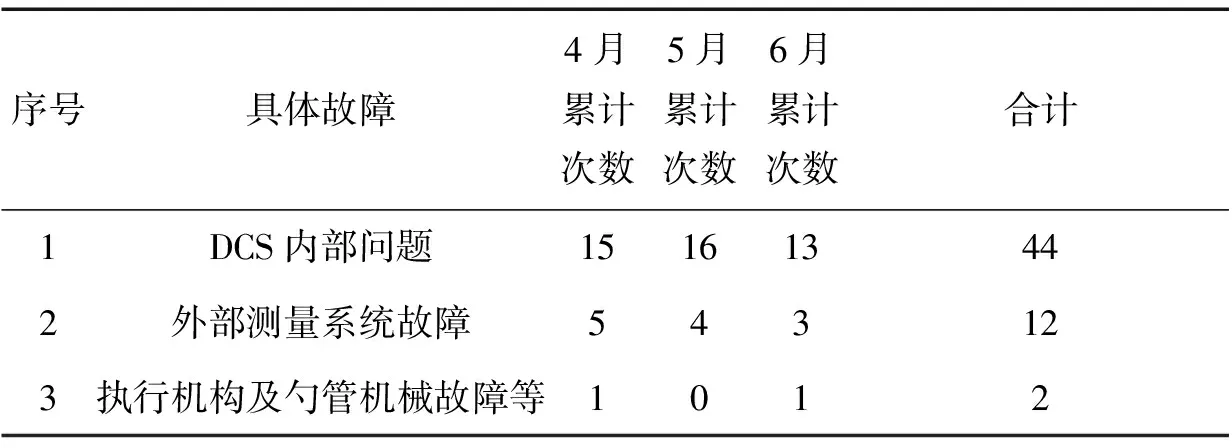
表1 导致给水控制不能投入自动的故障
由表1中数据可以得出,引起给水控制不能投入自动的故障,每月平均为19.3次,给机组稳定运行带来极大隐患。
通过查询DCS历史趋势,发现汽包水位在高负荷时一直不正常,波动较大,最大时与实际水位相差200 mm,但是又不能退出汽包水位保护(火力发电厂安全性评价明确规定退出汽包水位保护不能超过24小时),这在很大程度上增加了汽包水位保护误动作的机会。在 2014年1月17日就因汽包虚假水位,水位达到+300 mm,延时5 s触发 MFT(Main Fuel Trip,主燃料跳闸)动作(三取二信号),导致机组跳闸。因此, 汽包水位的不正常波动,已经对机组的安全运行构成严重威胁。
3 分析与结论
由表1数据可以得出,DCS内部问题和外部测量系统故障占总故障的96.6%,是导致给水控制不能投入自动的主要原因[3-4],因此,下面针对上述两个主要问题展开分析。
3.1 外部测量系统故障分析
幼儿园的孩子们天生对动画片有着浓厚的兴趣,为了让孩子们自觉融入多姿多彩的语言世界,我们在日常教学中,经常把教学内容通过声音、动画等课件展示出来,开发幼儿的语言想象能力。
根据现场设备实际情况,通过查看DCS系统逻辑,绘制汽包水位测量原理图,如图2所示。由图2可以看出,引起外部测量系统故障的原因只能为:差压变送器输出超出允许误差或测量零位定义有偏差。
经过现场检查汽包水位差压变送器,并抽取6个输出信号点,发现差压变送器的输出值没有超出允许误差范围;而对汽包水位的中心位置进行检查发现,变送器的测量零位比设计值偏高了25 mm,汽包水位变送器的量程为0~7 000 kPa,因此,需要对差压变送器的量程进行修改[5]。
3.2 DCS内部问题分析
跟踪从现场的汽包水位测量信号到DCS的输出信号作对比发现,在机组负荷率高于85%时,DCS输出信号被放大了一倍多,导致汽包产生较大的虚假水位,致使给水控制退出自动[6]。因此,由图2可知,导致虚假水位的原因为:压力补偿函数F(X)设置不合理。另外,根据现场观察与测试,发现汽包水位产生扰动时,PID调节器调节的过程时间太长,约为420 s,所以需要优化PID参数。
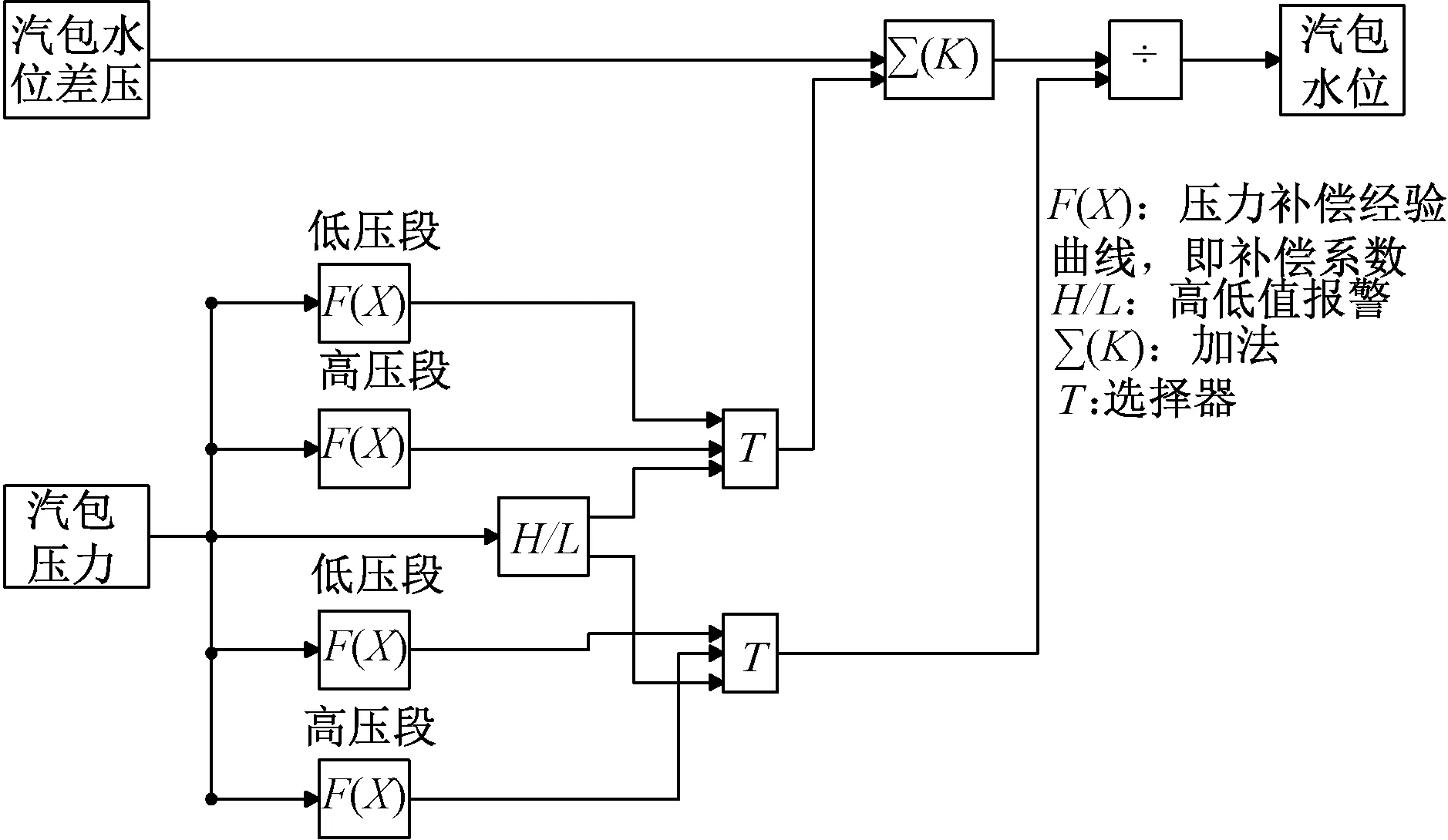
图2 汽包水位测量原理图
4 方案提出及实施
根据以上分析,引起给水控制自动投入率偏低的原因为:压力补偿经验曲线和PID调节参数设置不合理、水位测量零位定义有偏差,下面将对上述三方面原因提出相关解决方案并实施。
4.1 修正汽包水位压力补偿经验曲线
汽包压力参与汽包水位补偿计算,由于为重要信号,系统设计了3 个取样点,然后DCS系统再进行三选一。如果有坏质量或偏差大等状况会发出报警并切除水位自动,汽包压力切为二选一或单个正常信号,以保证汽包水位的正常监视功能,而不干预汽包水位的补偿计算。
由图2可知,压力补偿经验曲线作为汽包水位计算公式中的分母,因此,DCS显示汽包水位与压力补偿经验曲线成反比,压力补偿经验曲线既要反映汽包压力变化时水位变化的真实性,也要防止出现虚假水位产生,所以要进行反复的修改才能达到满意的效果;输入模拟信号来修正压力补偿曲线,修改后的曲线要平滑,线性要好[7-9],修正前后的压力补偿曲线参数如表2所示。
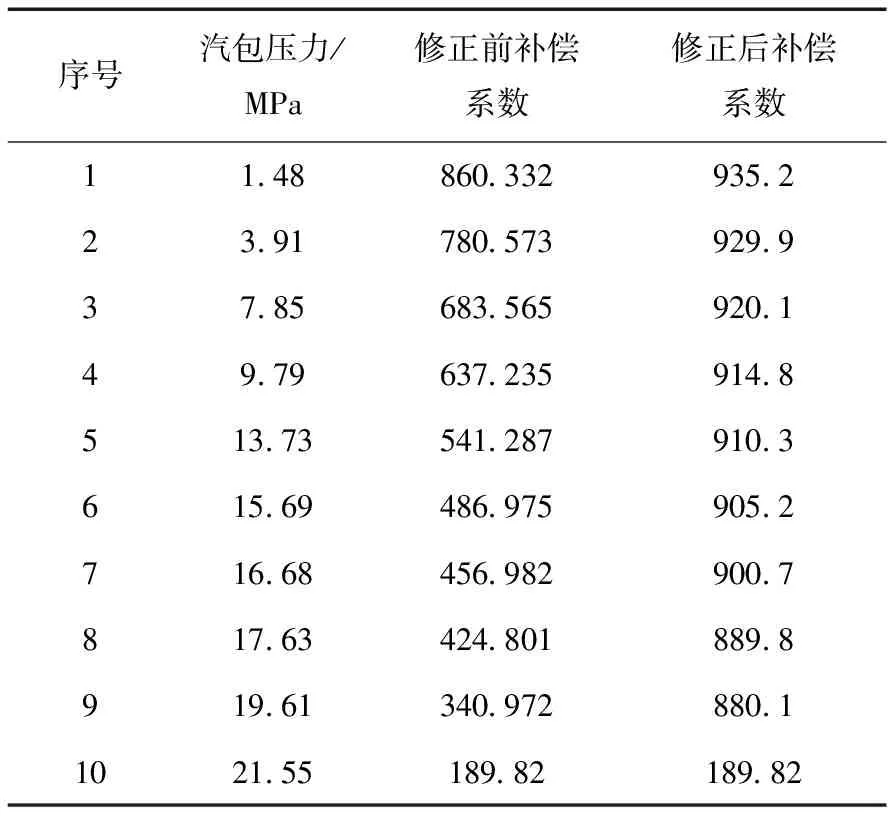
表2 修正前、后的压力补偿曲线参数
修正后的曲线更为平滑,线性更好,消除了机组高负荷时汽包产生的虚假水位,避免了由于汽包虚假水位信号而引起的机组跳闸,提高了机组运行可靠性,改善了机组变负荷性能[10-11],曲线如图3所示。修正后的压力补偿曲线后段,即压力大于19.61 MPa是起到汽包压力保护作用的,不参与给水自动调节。
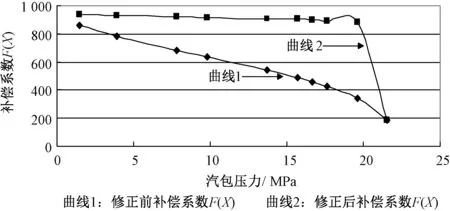
图3 修正前、后压力补偿经验曲线图
4.2 重新校对就地汽包水位计中心
用连通管重新校对就地汽包水位计中心位置,使DCS显示水位与就地水位计中心线基本一致,以确定汽包水位差压变送器的量程[12]。校对的结果的是DCS显示水位的零位比就地水位计的零位高出25 mm,因此,将汽包水位差压变送器的量程由(0~7 000)Pa改为(0~6 750)Pa,使DCS显示水位的中心线相应降低25 mm。改动后DCS显示水位与就地水位中心位置相差只有8.5 mm,达到要求。
4.3 重新优化PID参数
修正汽包水位压力补偿曲线后,分别将2台电动给水泵投入自动,发现调节对象产生扰动到调节过程稳定的过渡时间长,调节效果不是很理想,因此,需对主、副调节器的PID参数重新优化。
通过检查DCS逻辑,发现给水控制任务由2个调节器来完成。主调节器采用比例积分控制规律,保证水位无静态偏差,其输出信号、给水流量信号和蒸汽流量信号都作用到副调节器。副调节器为保证副回路的快速性也采用比例积分调节器,能消除给水流量的自发扰动,当蒸汽负荷改变时迅速调节给水流量,保证给水流量和蒸汽流量的平衡。
在整定PID控制器参数时,根据控制器的参数与系统动态性能和稳态性能之间的定性关系,采用实验凑试的方法来调节控制器的参数。在整定内回路时,调节器参数可以设置得较小,使内回路成为快速随动系统,外回路可以看作是一个单回路调节系统,可采用整定单回路调节系统的方法来整定外回路。首先整定比例部分,将比例系数由小调大,并观察各次响应,直至得到反应快、超调较小的响应曲线;由于在比例控制下稳态误差不能满足要求,因此将已选择的比例系数减小为原来的50%~80%,再将积分时间置一个较大值,观测响应曲线。然后减小积分时间,加大积分作用,并相应调整比例系数,使系统在保持良好动态性能的情况下,静差得到消除,反复试凑直至得到较满意的响应,从而确定合理的比例和积分参数[13],优化前后参数如表3 所示。
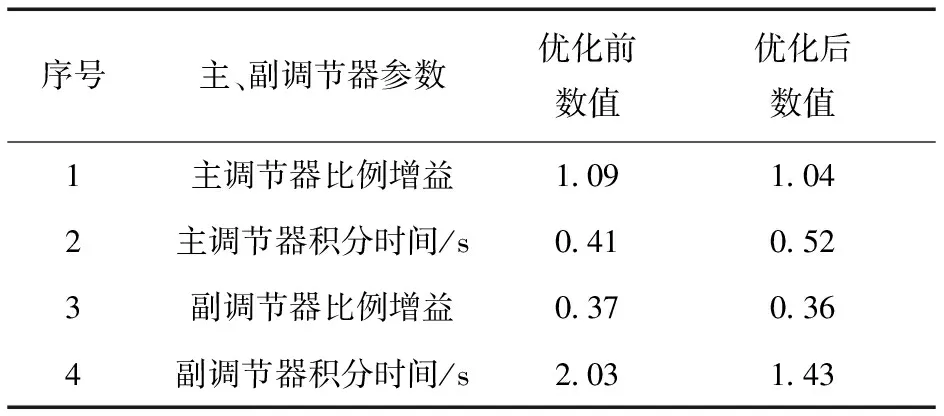
表3 优化前后主、副调节器的PID 参数
优化PID调节器的PI参数后,调节过程的过渡时间约为280 s,调节效果良好,在保证给水泵及附属设备可靠的前提下,控制优化显得更为重要[14]。
5 效果检查
经过连续1年多的运行,经历了机组负荷从高达322.50 MW到低至96 MW及各种工况变化的考验,给水自动投入率达到99%,满足了火力发电厂安全性评价要求,而且也没有发生由虚假水位触发MFT动作的机组非计划停运事件,提升了热力系统的节能性,达到了节能降耗的目的[15],为机组安全运行提供有力保障。
6 结论
本文针对330 MW机组的给水自动不能投入以及汽包虚假水位导致MFT误动问题,优化了汽包水位压力补偿经验曲线,并重新配置PID参数。同时校对就地汽包水位计中心,彻底解决了给水控制系统不能投入自动以及汽包水位波动大问题,满足了火力发电厂安全性评价要求。经过实际运行,给水自动控制系统稳定可靠,能够满足不同负荷的要求,同时避免了由于汽包虚假水位信号而引起的机组跳闸,保证了机组安全稳定运。
[1]陈祥光,孙玉梅,吴磊,等.自动控制原理及应用:第2版[M].北京:清华大学出版社,2016:196-209.
[2]刘禾,白焰,李新利.火电厂热工自动控制技术及应用[M].北京:中国电力出版社,2009:155-160.
[3]孙长生,蒋健,刘卫国,等.浙江省火电厂锅炉汽包水位测量问题分析及改进[J].电力建设,2010, 31(10):56-60.
[4]姜东旭.双室平衡容器在汽包水位测量中的应用及其动态补偿[J].东北电力技术,2013,34(3): 45-47.
[5]王自主.锅炉汽包差压式水位计误差分析和技术改进[J].热力发电,2011,40(8):61-63.
[6]张玲芳,杨平,应启戛.电站锅炉汽包水位测量技术研究进展[C].第八届工业仪表与自动化学术会议, 2007.
[7]许晨光,杨平,邵健青,等.锅炉汽包水位软测量方法初探[J].华东电力,2005,33(8):47-50.
[8]华志刚,邬菲.300MW机组锅炉给水自动控制系统分析与改进[J].电力系统自动化,2002,26(4): 67-69.
[9]吴业飞,时敏.双室平衡容器汽包水位测量及其补偿系统的应用[J].自动化仪表,2004,25(7):33-37.
[10]蔺虎,胥艳明,蔺军.压力补偿在汽包水位测量系统技术改造中的应用[J].新疆电力技术,2011,20(4):90-92.
[11]王丕洲,谷俊杰,秦达飞,等.600MW超临界直流锅炉两种给水控制系统分析[J].电力科学与工程,2013,29(4):64-69.
[12]高维信,董强,荆予华,等.锅炉汽包水位监视基准表和保护仪表选型[J].中国电力,2003,36(7):51-55.
[13]杜礼春,邢红颖.1号机组协调控制系统优化及投运[J].电力科学与工程,2010,26(2):64-67.
[14]刘长良,周丹.660MW单列辅机超超临界机组给水控制策略优化[J].电力科学与工程,2013,29(9):43-47.
[15]王继选,韩中合,钱江波,等.基于热经济学的火电机组热力系统分析[J].华北电力大学学报(自然科学版), 2013, 40(6):91-96.
Optimization and Application of Water Supply Automatic Control System for the 330MW Unit
JIANG Liewei
(Shaoguan Power Plant, Guangdong Yudian Group Co.,Ltd.,Shaoguan 512132,China)
Taking the water supply system of a 330MW unit in a power plant as the study object, in view of the phenomena that the water supply can not be put into operation and MFT is caused by the false water level of the steam drum, by examining the external measurement system and the DCS system logic, the reason why the water supply control system can not be put into operation automatically is found through analysis. The pressure compensation experience curve and PID adjustment parameter setting are not reasonable, and the zero position of the water level measurement is biased. According to the above reasons, the experience curve of steam drum water level pressure compensation has been modified, and the local water level meter center is proofread again, and the PID parameters are optimized. After the completion of the program implementation, the water supply control system can meet the requirements of different load through the practical operation, so that automatic availability rate of water supply control system has been greatly improved, which significantly enhances the level of automation of the unit. At the same time, the unit trip caused by the false water level signal of the steam drum is avoided, which ensures the safe operation of the unit.
water supply control; the false water level; pressure compensation; safety assessment; proportion integration differentiation; the steam drum
10.3969/j.ISSN.1672-0792.2017.03.013
2016-10-28。
TK39
A
1672-0792(2017)03-0074-05
姜烈伟(1979-),男,高级工程师,主要从事火电机组自动化及过程控制方面的研究。
