数字式海洋物探气枪震源控制系统
2017-04-21邱永成郭轶朱耀强
邱永成++郭轶++朱耀强


摘 要:设计一种用于海洋物探的数字式气枪震源控制系统,该系统由水上、水下两部分组成。水上部分负责控制指令的发送和数据的处理显示;水下系统设计成一种分布式架构,利用前端电路直接对采集波形进行数字化处理,从而完成对于海洋物探气枪震源的实时控制。该系统结构简单、易于实现,并且能够支持多震源的同步控制和延迟控制。
关键词:地震勘探 气枪震源 同步控制 立体震源
中图分类号:TP274+.2 文献标识码:A 文章编号:1672-3791(2016)12(a)-0016-04
气枪震源是1960年代发明的,经过近半个世纪的发展,气枪震源逐渐成为一种重要的人工震源。海洋地震勘探一般使用气枪作为震源,其是利用高压空气迅速释放,由气泡的膨胀与收缩而产生地震波的一种工具。气枪震源系统具有稳定性好、子波一致性好、频带宽、野外作业方便等特点[1,2]。
气枪震源控制系统是气枪震源系统的关键组成部分,主要功能是完成对气枪震源的激发控制,实时采集气枪同步信号、近场子波信号、压力和深度数据,从而对气枪震源的激发质量进行监控。气枪震源控制系统分为模拟和数字两种。数字式气枪震源控制系统的主要特点是在气枪震源附近完成采集信号的数字化处理,缩短了模拟信号传输的长度,减小炮缆的芯线数量,能够允许更小的偏移距。高质量的3D、4D地震勘探,需要高度重复的、宽频震源的信号,然而,目前许多勘探船舶仍使用传统的模拟震源控制系统,控制器所需采集的模拟控制和监测信号,通过又长又昂贵的炮缆传递,而炮缆在复杂的海上作业环境中,极易出现漏电的情况,从而导致模拟的震源信号不能满足高精度3D、高重复4D 勘探的需要。数字式气枪震源控制系统弥补了模拟气枪震源控制系统的不足。
目前,气枪震源主要有Sleeve枪、BOLT枪、G枪等,气枪震源控制系统由国外垄断,这制约了我国海洋地震勘探技术的发展。该文提出一种用于海洋物探的数字式气枪震源控制系统,该系统能够完成对海洋气枪震源的同步控制和延迟控制,对于立体震源的研究、气枪阵列组合及气枪震源控制方式的研究具有实际的应用意义。
1 系统结构
数字式气枪震源控制系统主要分为硬件平台与操作控制软件两部分,硬件平台包括水下及室内硬件;软件部分主要至系统控制软件,运行于水上工作站。系统的具体设计目标如下。
(1)水下单元。
①同步控制精度0.1ms;
②点火电压60/90VDC;
③近场采样率0.25、0.5、1、2、4ms;
④近场采样分辨率24bit;
⑤压力深度采样分辨率16bit。
(2)室内单元。
①可控制阵列数 12个;
②支持震源数 4个;
③一个阵列可控制子枪数 12个;
④近场记录格式SEG-D;
⑤最小内部循环时间小于3 s。
数字式气枪震源控制系统总体结构如图1所示。水下硬件包括近场采集、同步信号采集、点火控制以及数据传输板;室内硬件包括数据接收板和控制板。
近场信号采集采用专用地震信号采集套片,同步信号和压力深度信号的采集采用高精度采集芯片[3,4],采集数据的处理采用FGPA完成,高压485传输机制对数字化的信号进行长距离传输,在室内对点火控制以及采集数据的处理通过百兆网络与操作软件实现互联,并实现导航和枪控触发信号的接收功能;控制软件部分完成系统整体控制功能,包括参数配置、命令发送、操作控制、数据记录、实时显示等。
整个水下系统被设计成一种分布式架构,可分为多个阵列,每个阵列支持多个采集传输单元模块。该架构使得该系统能够支持多气枪阵列的同时点火控制、数字化处理等(图1)。
水下单元是整个系统的关键部分,位于水下每个子枪的附近,包括采集包和传输包。采集包主要是实现对每个气枪的点火进行控制,并把同步信号、近场和压力深度数据进行数字化,传输包主要实现把每个枪阵所有采集包的数据传输到室内系统。
室内控制单元主要实现对水下各单元的控制,把接收的数据处理后发送给工作站,包括室内控制箱体和电源箱体两部分。
2 水下单元设计
水下单元包括采集模块、传输模块和连接线,如图2所示,位于水下气枪附近1 m左右,与传感器一起安装在枪架上,其两端共有两个8芯AG插座,分别用于供电、命令和数据的发送、连接近场检波器、连接外部的压力或者深度传感器以及连接气枪震源的电磁阀和线圈。由于采集模块安装与水下与气枪距离约1m左右,气枪激发时振动比较大,因此采集模块的制作需要采取防水和防振措施。
每个采集模块负责的工作有如下几项。
(1)命令的接收与发送:接收室内控制单元传来的命令,根据命令字和命令号进行解析,控制采集及传输部分的工作,同时控制电磁阀的点火。
(2)数据采集:采集近场检波器、压力和深度传感器的数据,按照一定的格式打包发给室内控制单元。
(3)供電:采集模块把输入的DC48V电源转换成数据采集板和本级压力深度传感器需要的电源。
水下单元的数据传输通过RS485完成,各个级联传输包之间通过RS485总线方式实现水下单元的数据传输。该单元需要完成与室内控制单元通讯、控制气枪震源的点火、采集气枪线圈数据、采集近场传感器数据、采集压力深度传感器的数据、采集辅助数据、点火检测及状态判断等功能。
数据采集部分则采用专门的高精度AD采集气枪震源线圈以及近场传感器的数据;采用单片机来对电磁阀点火及数据的采集进行控制,利用单片机的内部AD来采集压力、深度以及辅助数据。命令和数据的接收与发送采用RS485总线传输,由于炮缆的长度一般在四五百米左右,每个枪阵的第一个采集模块与室内系统的传输距离应该要达到600 m,因此485传输距离要大于600 m。
3 室内控制箱体设计
控制箱体位于室内,与上位机通过网络进行连接,与导航和采集系统通过同轴电缆进行连接,与水下单元通过RS485总线进行相连,与电源箱体通过RS485总线相连,如图3所示。主要完成如下功能。
(1)通过百兆网口接收控制工作站的控制命令和配置参数,并通过RS485总线转发给12个水下单元阵列以控制其工作状态。
(2)接收12个水下单元阵列传来的数据,分离出线圈数据、近场检波器数据、压力和深度传感器数据以及状态数据,并通过百兆网口发送给控制工作站。
(3)实现对电源箱体以及12条炮缆供电的控制功能。
(4)接收导航传来的Nav_start,产生TB信号,控制水下单元的工作方式。
(5)接受控制工作站传来的报警信息,进行相应的报警。
4 系统工作协议
根据整个系统的设计结构,需要建立如图4所示的通讯通道。其中,通道①为系统控制单元(SCU)与工作站之间的通道为上行数据通道,通道②为SCU与工作站之间的通道为下行的命令通道,通道③为SCU与采集板之间的命令数据通道。其中①、②为网络通信,③为RS485总线通信方式。
系统的总体流程包括两条主链路流程:一是命令流程,二是数据流程。
(1)命令流程:由工作站或者SCU发起,按通信协议进行系统的初始化配置、工作模式设置、正常放炮、QC监控、数据存储控制等所有命令的封装、发送,并由SCU箱体内的板卡进行命令的解析、转发,一部分命令由SCU箱体内的板卡进行处理,一部分命令转发至水下单元执行。命令流程中还包括SCU箱体内同步指令的处理流程与命令反馈信息处理流程。
(2)数据流程:由水下单元采集电磁阀线圈、近场、压力和深度传感器以及各种辅助的数据,进行封装后通过485总线通信方式发送给SCU箱体内的CPU板,按通信协议进行数据的解析和处理,再进行封装后传给工作站完成数据的存储与监控等。
5 测试与验证
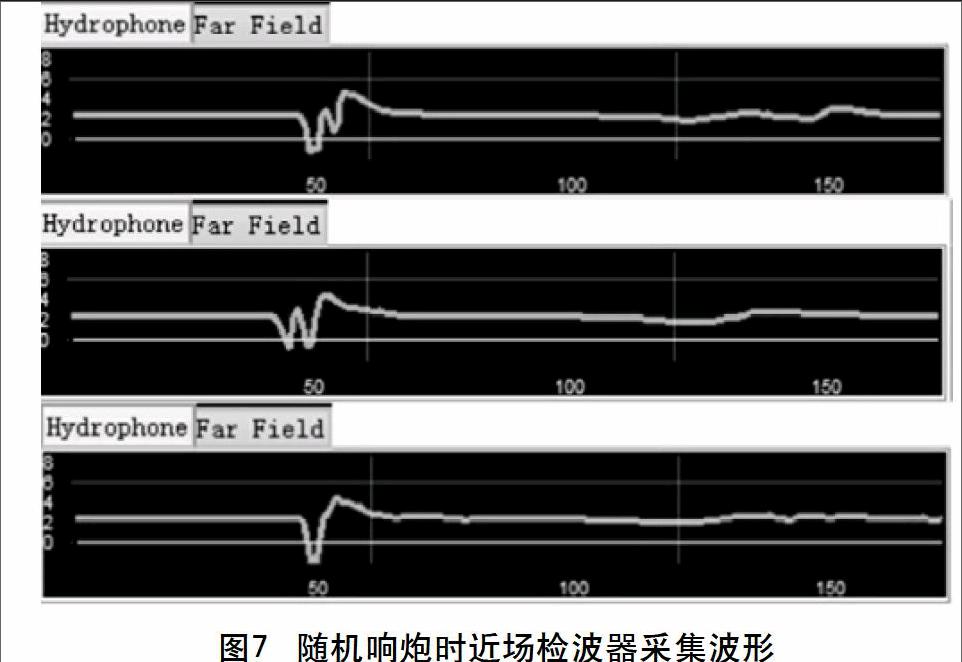
气枪震源控制系统的主要功能是完成对气枪震源的点火控制,实时采集气枪同步信号、近场子波信号、压力和深度数据,从而对气枪震源的点火质量进行监控。为验证该文所提设计方法和系统结构,利用Altera公司的Stratix系列芯片以及ST公司基于ARM Cortex-M3核的STM32F103R8处理器作为主要实现芯片,设计实现一套数字化震源控制系统,并对该系统进行一系列实验室和海上现场测试,包括系统通信测试、系统监控测试、系统性能测试等方面。2015年3月,该系統在物探船上进行野外实验,图5为进行水下单元固定安装的现场图;图6为响炮时一个阵列的气枪同步波形及近场检波器的采集波形;图7为随机响炮时近场检波器连续采集的3炮波形图。
野外试验进行了两天,连续响炮约4 000炮,整个试验过程中整个系统运行稳定,气枪的延迟误差在0~0.02 ms左右,与模拟气枪震源控制系统的零点几毫秒相比,该套系统的同步控制精度提高了一个数量级,达到了与国外数字枪控相同的指标;另外,野外还进行了气枪震源延迟控制试验,该系统可以实现3种方式的延迟控制:(1)阵列与阵列间固定延迟响炮;(2)每一条枪固定延迟响炮;(3)所有枪随机响炮。气枪震源延迟控制的实现对于立体震源的研究、气枪阵列组合及气枪震源控制方式的研究具有实际的应用意义,可以拓展平面震源的低频端能量、补偿高频端的陷波点,有利于深海油气地震勘探的中深部目的层成像[5]。
6 结语
气枪震源控制系统直接关系着海洋物探震源工作的稳定性、可靠性以及震源性能,该文提出一种数字式气枪震源控制系统,由水上、水下两部分组成,分别用于完成系统监控以及近场地震波形数字化采集。水下系统设计成一种分布式架构,利用前置高品质数字化电路直接对近场波形进行数字化处理。在水下采集和传输模块的共同配合下,数字化信号直接送至水上系统进行相应的处理,从而完成对于海洋物探气枪震源系统的实时控制。该系统结构简洁、易于实现,并且具备良好的扩展能力。实验室及海上试验表明,该系统除了能够满足海洋物探对于气枪震源控制系统的同步控制要求外,还能够实现气枪震源的多种延迟控制方式,对于立体震源的研究、气枪阵列组合及气枪震源控制方式的研究具有实际的应用意义,可以拓展平面震源的低频端能量、补偿高频端的陷波点,有利于深海油气地震勘探的中深部目的层成像。
参考文献
[1] 陈浩林,全海燕,於国平.气枪震源理论与技术综述(上)[J].物探装备,2008,18(4):211-217.
[2] 陈浩林,全海燕,於国平.气枪震源理论与技术综述(下)[J].物探装备,2008,18(5):300-308.
[3] 何正淼,宋克柱,汤家骏,等.24位ADC在地震数据采集中的应用[J].数据采集与处理,2005,20(2):244-248.
[4] 王超,宋克柱,唐进.高性能水下地震数据采集系统设计与实现[J].吉林大学学报:工学版,2007,37(1):168-172.
[5] 韦成龙,杨蜀冀,关晓春,等,立体延迟气枪震源分析[J].石油地球物理勘探,2016,7(6):1027-1033.
