国外火星低空飞行器技术发展研究
2017-04-19董捷饶炜孟林智王闯杨超万志强蒋崇文
董捷 饶炜 孟林智 王闯 杨超 万志强 蒋崇文
(1 北京空间飞行器总体设计部,北京 100094) (2 北京航空航天大学航空科学与工程学院,北京 100191)
国外火星低空飞行器技术发展研究
董捷1饶炜1孟林智1王闯1杨超2万志强2蒋崇文2
(1 北京空间飞行器总体设计部,北京 100094) (2 北京航空航天大学航空科学与工程学院,北京 100191)
针对当前国外火星低空飞行器主要类型,包括浮空气球、固定翼、旋翼、扑翼和倾斜旋翼等的发展情况进行了调研与分析,梳理了低雷诺数气动外形设计、能源和动力系统设计、飞行自主导航控制等主要关键技术及火星低空飞行器的未来发展趋势,并对我国火星低空飞行器技术发展提出了建议。
火星;飞行器;低雷诺数
1 引言
由于火星上空存在稀薄大气,使设计类似地球航空器的火星低空飞行器成为可能。其通常可在距火星表面较低高度(5千米以下)以亚音速飞行。有别于传统的环绕、着陆巡视探测,火星低空飞行器技术形式多样,大小规模灵活,可兼顾广度探测和局部区域(尤其是复杂地形)的深度探测,还能辅助着陆巡视任务提高任务规划效率,为火星采样返回任务获取多点样品,以尽可能低的成本获得尽可能高的科学收益,在国外火星探测领域一直是研究的重要方向。
目前,国外已经开展研究的火星低空飞行器类型主要包括浮空气球、固定翼、旋翼、扑翼和倾斜旋翼五类,如NASA研究的火星超压气球[1]和阿瑞斯(ARES)固定翼飞机[2]、喷气推进实验室(JPL)研究的共轴双旋翼直升机[3]、部分高校研究的扑翼机如虫形飞机(Entomopter)[4]、英国萨瑞研究中心研究的倾斜旋翼[5]等。其中,浮空气球的设计思路提出的较早,但由于火星大气密度低,功能有限,关注度相对较低;ARES飞行器着眼于一次性长时间探测,从而掌握火星遥感卫星不易短时获取的大范围高分辨率数据;共轴双旋翼直升机、扑翼机等飞行器主要定位于辅助火星车任务规划,每个火星日及早获取前方大范围地形数据,在一些扩展应用中,还考虑用于多位置采样,以及为宇航员登陆火星后的表面探测提供支持。
本文首先对国外已经开展的火星低空飞行器技术形式及典型飞行器进行分析,介绍了不同技术形式的工作原理、典型探测器主要参数,总结其技术特点。在此基础上,对火星低空飞行器的主要关键技术进行分析,归纳技术发展趋势,并提出发展建议。
2 国外火星低空飞行器的发展现状
以下按技术难度和发展历程对国外不同形式火星低空飞行器发展现状进行介绍。
2.1 浮空气球
浮空气球是技术发展最早的低空飞行器。目前开展研究的火星浮空气球主要包括零压气球和超压气球两种。
(1)零压气球:气球内有排气管和外部大气连通,在地面时气体不充满气球。随着高度增加,外部大气压降低,气球内浮升气体膨胀充满后,多余气体通过排气管排入大气,使内外压差基本为零,当浮力与重力相等时,不再上升。由于白天和夜晚温差大,气球收缩,浮力减小,高度会降低,如维持高度只能抛掉压舱物,气球变轻,这样白天又须排掉一部分气体,造成气体逐渐减少,因此难以长期保持设计高度。
(2)超压气球:气球与大气不连通。白天温度较高时,允许气球承受一定内外压差,这对气球的材料和结构设计的要求较零压气球更高,但有利于长期保持设计高度。
基于火星大气压力变化范围,采用零压气球较超压气球其高度变化较大。超压气球与零压气球的对比如图1所示。
火星超压气球系统通常包括球体(包括球瓣、密封条、充气管等)、连接系绳、吊舱等组成[6](见图2)。球体主要包括球膜、加强筋和球上装置。球体是产生升力的部分,需要承受昼夜变化带来的压差变化,要具有较高的强度。通过连接球顶和球底的高强度延伸性加强筋使球膜在受到较大的内外压差时形成圆弧状突起。吊舱包括供电、控制、通信、任务载荷等。供电可采用太阳能电池+蓄电池方式,或者采用高效燃料电池。
目前火星气球在轨释放过程包括飞行中释放和在火星表面释放两种方案,如图3和图4所示[7]。
2.2 固定翼飞行器
固定翼飞行器是指其机翼构形相对机身或机体纵轴“固定”不动的飞行器。按气动原理,其升力主要从固定翼的上下气动“压力差”产生。根据对固定翼飞行器续航能力的要求,分为无动力和有动力两种类型。
2.2.1 无动力飞行器
最典型的为滑翔机,飞行时利用自身重力在前进方向分力克服气动阻力保持前进速度。增大释放高度、降低翼载荷、增大升阻比与升力系数[8],可以实现较长的留空时间。
NASA计划在2022-2024年火星任务中搭载小型滑翔机,为未来载人火星探测选取着陆点提供详查数据,获取着陆区附近10 km×10 km范围内高分辨率图像(0.1 m/像素),验证滑翔技术和翼型(见图5)。飞行器基于目前快速发展的立方体卫星(CubeSat)技术[9],翼展达61 cm,质量小于0.45 kg。机翼采用复合材料,采用一次性高效蓄电池(LiSoCl2)。近期正在开展地面技术验证。
飞行器(即滑翔机)一直以收拢状态贮放在火星进入舱内,进入舱进入火星大气后,在释放大底及配重的同时,释放滑翔机。滑翔机分离后展开机翼并飞行,从火星表面600 m高度开始滑翔,飞行时间约10 min,飞行距离约32 km。
2.2.2 有动力飞行器
由于火星大气中以CO2为主,不能采用类似在地球大气飞行时,通过空气与燃料混合燃烧产生动力,因此,国外研究通过火箭推进系统或利用电能驱动螺旋桨两种方式产生动力。
第一种采用火箭推进系统方式,以美国NASA的ARES(Aerial Regional-scale Environmental Survey)飞行器为典型代表[10-11],已经开展了地面验证,如图6所示。机体使用复合材料,并采用了翼身融合布局,机身长4.45 m,双机翼展开共6.25 m,质量113 kg。为了适应着陆舱容积,释放前,机翼与尾翼需要折叠收拢在舱内。配置双组元液体火箭推进系统。
飞行器由进入舱携带进入火星大气,先借助进入舱和降落伞减速,进入舱大底分离后,在距离火星表面约8 km处,飞行器与进入舱分离,随后展开折叠尾翼,释放引导伞减速,再展开折叠机翼,利用伞将飞机拉起抬平,最后启动发动机,在火星上空约2 km高度处开始巡航飞行(见图7)。工作时巡航速度145 m/s,航程450~600 km,飞行时间约1 h,也采用一次性蓄电池(Li-SO2)。飞行器对火星表面的探测数据采用两种方式传回地球。方式一利用大气进入前分离的巡航级作为中继,后续传回地球;方式二飞行器上的数据先同步转发至火星环绕卫星,后续由环绕卫星传回地球。
方式二采用电机驱动的螺旋桨推进系统,方案仍以概念研究居多。由于电力驱动的能量转化效率相对较低,该类型飞行器通常需要尽可能地实现轻小型化设计。
图8是日本宇宙航空研究开发机构(JAXA)等联合论证的一种以螺旋桨为推进方式的小型火星飞行器[12]。飞行器质量仅4 kg,翼展共2.45 m,功率223 W。拟采用轻质高功率比的压膜锂离子电池(厚度100 μm,功率质量比118 Wh/kg),适于火星光谱的太阳能电池还在论证。
螺旋桨推力大小约2 N,桨尖马赫数峰值为0.8,巡航飞行速度60 m/s,飞行距离100 km,飞行时间约30 min,携带一台小型高分辨率相机。为了尽可能地减轻结构占比最大的机翼质量,论证了超轻型的一体化模制塑料机翼和“聚酰亚胺膜+镁合金骨架结构”机翼两种方案(见图9)。
2.3 旋翼飞行器
旋翼飞行器最大的特点是可以实现在火星大气层中悬停、低速移动、反复起降。具体又分为单旋翼、多旋翼组合以及共轴反旋翼等多种形式。由于火星较低的大气密度,设计单旋翼飞行器需要较长旋翼以保证升力,并加尾桨产生平衡力矩,造成机身长、结构利用效率低、无法适应进入舱容积等问题,因此当前技术形式集中在共轴双旋翼或四旋翼形式。而近期NASA重点开展了小型共轴双旋翼飞行器的研制[3]。图10为美国喷气推进实验室(JPL)设想的概念飞行器,质量约1 kg,旋翼跨度1.1 m,包括两部分结构,第一部分为位于上部的动力系统,上下布置共轴系统;第二部分为位于下部的仪器舱及支架。仪器舱采用立方星技术,集成了导航控制、电源、测控通信、载荷等系统设备;仪器舱下部安装着陆支架。为提高升力,旋翼设计转速达到2400 r/min,每天可飞行2~3 min,飞行距离约0.5 km,在飞行器顶部固定圆盘安装太阳电池。
目前JPL正在开展火星大气环境下飞行性能试验(见图11)等专项技术验证工作,由于技术难度较大,目前规划的2020年火星着陆巡视任务仍不具备在轨应用能力。
2.4 倾斜旋翼飞行器
倾斜旋翼飞行器是对固定翼和旋翼技术的组合应用。既可以用旋翼垂直起飞,也可以控制倾转到水平姿态,利用固定翼产生的升力飞行,增大飞行速度,着陆时可以再倾转到直升机状态垂直着陆[13]。整个任务阶段仅是起飞、着陆的短期功耗大。目前火星倾斜旋翼有两种实现方案(见图12)。
方案一[14]:有一对升降副翼,既是水平飞行时升降舵和转弯侧滑的副翼,也是从垂直状态转为平飞状态的关键控制面。其水平飞行稳定性较好,但由垂直至水平转换过程中须保证动态稳定性。
方案二[5]:采用一组共轴反旋翼,置于机身中部涵道内,机身前部采用两组单旋翼,分别置于机头两侧,通过一组可旋转的连接杆连接。垂直起飞或着陆时,两组单旋翼调整至拉力沿垂直方向,水平飞行时,调整至沿水平反向。垂直飞行时,依靠中部共轴
反旋翼和两组单旋翼共同工作,水平飞行时仅依靠两组单旋翼产生动力。
方案一通常配置2个旋翼,系统功率低,垂直与水平方向转换时需要利用舵面调整飞行器姿态。方案二总质量相对较大,为实现起飞拉力,配置3个及以上旋翼,功率大,但垂直与水平方向转换时不须要调整飞行器姿态,只须调整旋翼指向。
2.5 扑翼飞行器
扑翼飞行器采用了类似昆虫飞行时的涡流增生能力。产生高升力的原理主要是扑翼有更强的“前缘涡”并延迟脱落,“旋转环流”和“尾流捕获”也能产生额外升力[15-16]。相比传统翼型1~1.2的升力系数,扑翼飞行器升力系数可以达到5。
实际的扑翼飞行器还无法做到完全仿生形态,而是简化为自主拍打的成对机翼进行周期性协调运动。设计概念按系统复杂性由易至难,依次为单对扑翼、双对扑翼及变体扑翼,双对扑翼又包括对称双对扑翼式和反对称双对扑翼式两种(见图13)。
图13(a)中单对扑翼飞行器前有一对扑翼,后有尾翼。尾翼用于控制飞行器平衡、迎角及航向。图13(b)为一种典型的对称双对扑翼式飞行器[17],上下扑翼同时开合转动。图13(c)是一种反对称两对扑翼式飞行器(Entomopter)[18],前后串行布置扑翼,180°反相位扑动。质量为0.5~2 kg,飞行速度为2~30 m/s,翼展为0.3~1 m,升力系数为7.95~10.6,飞行高度在30 m以下,以燃料燃烧为动力。图13(d)为德国Festo公司研制的变体扑翼飞行器智能鸟(Smartbird),源于海鸥飞行方式[19],其翼展为2 m,质量为480 g,扑翼面积为0.5 m2,飞行速度为5 m/s,扑打频率2 Hz,平均消耗功率23 W。为了降低整个飞行器结构质量,采用了轻质碳纤维材料。
3 火星表面低空飞行器特点分析
3.1 不同形式飞行器技术特点对比
火星表面几千米高度处大气密度仅为地球表面的1%,对应雷诺数范围为104~105,明显低于地球大多数航空器(2×106~2×108),因此地球航空器不完全适应火星大气环境,大多数现有常规地球航空器翼型在该条件下升力系数、阻力系数不规则,升阻比明显降低。因此火星低空飞行器设计更强调高升力、低阻力与轻质机体。此外,火星低空飞行器只能结合着陆平台或火星车释放与工作,没有理想的表面起飞和着陆场地。目前已经开展研究的不同形式火星飞行器技术特点见表1。
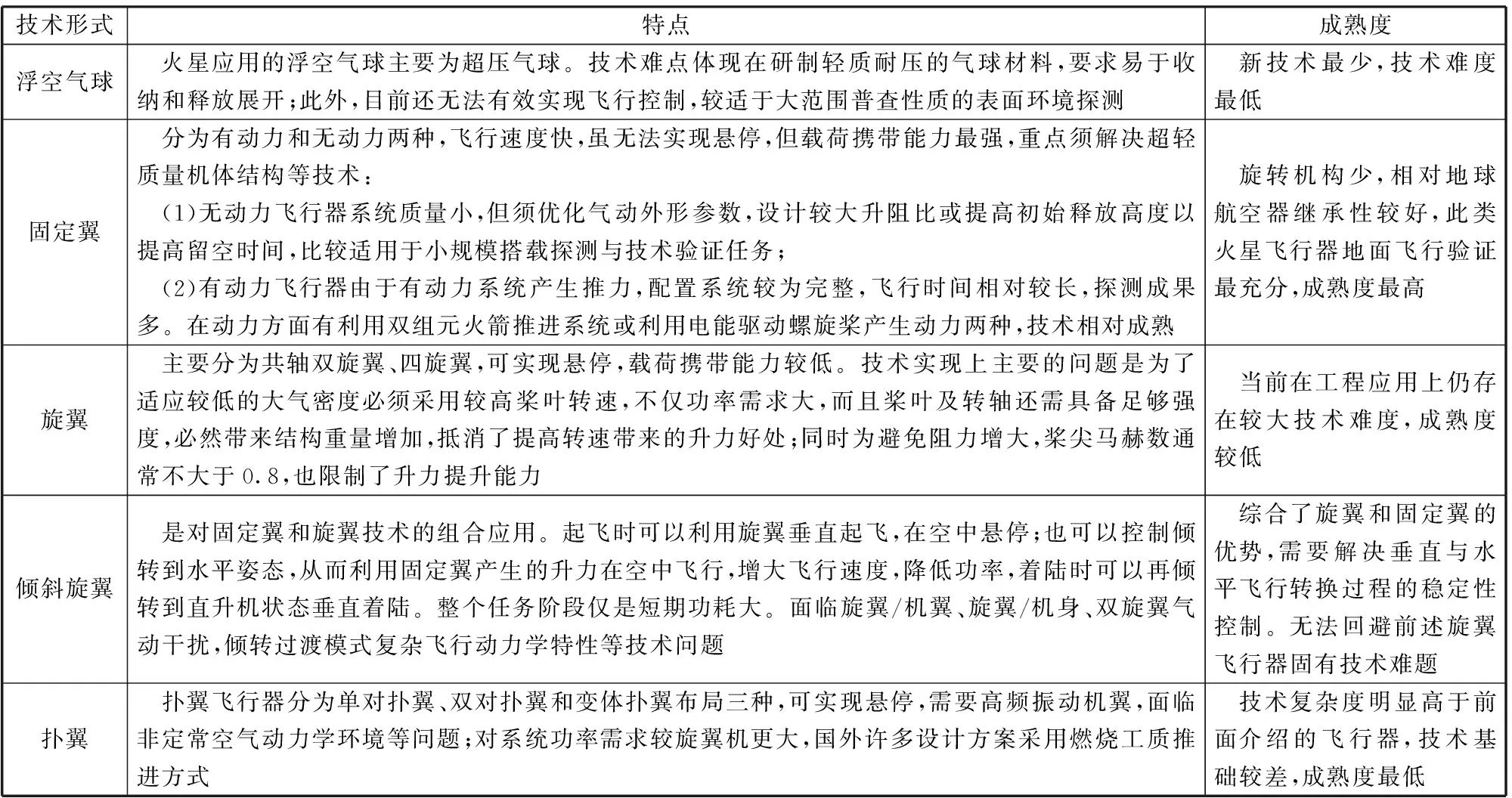
表1 不同形式飞行器技术特点对比Table 1 Technical characterisitics of different types
3.2 关键技术分析
由于火星特殊的工作环境,使火星低空飞行器的研制面临许多关键技术,具体如下:
1)低雷诺数气动外形设计技术
火星低空飞行器雷诺数较地球明显降低,升阻比不足,为保证携带载荷能力,对机身轻量化提出很高要求;同时还要承受地球航空器不须经历的运载发射、发动机变轨、火星大气进入等力学环境,以及正常飞行时的气动力学条件,因此又须要通过增加机体质量保证必要强度。为了平衡这一矛盾,必须尽可能地挖掘飞行器气动外形、机翼翼型设计潜力,如采用翼身融合技术,优化机翼前缘形状、相对厚度、弯度等参数使飞行器整体获取尽可能高的升力系数和较低的阻力系数。
此外,为适应火星进入舱包络,飞行器必须折叠机翼、尾翼等关键部件或充气展开(见图14)[20],在大气进入一定阶段或着陆后再展开机翼、尾翼等结构并释放。
2)能源和动力系统设计技术
(1)能源技术:目前利用的发电方式主要包括光伏发电、可重复利用燃料电池发电两种,储能方式主要包括可充电电池和一次性电池。
对于光伏发电,由于火星附近太阳强度较地球明显降低,必须研究高功率质量比的轻型太阳电池。对于可重复利用燃料电池发电,须充分利用火星表面CO2资源,通过着陆平台对其分解为飞行器补给,研究轻小型燃料电池技术。对于储能方式,针对一次性短期任务,技术方向是采用一次性高效电池,如LiSO2电池、LiSOCl2电池、LiCFx电池等。
(2)动力技术:火星大气主要成分是CO2,无法类似地球航空器采用燃料与空气混合燃烧的方式产生推力。可以利用的动力方式主要包括电推进、火箭推进两种。从工作效率、技术成熟性、研制风险方面分析,火箭推进是相对有利的选择。
3)飞行自主导航控制技术
(1)导航:在火星表面工作期间,飞行器自身的导航定位无法采用当前地球无人机普遍采用的GPS定位技术;同样由于火星磁场弱,规律尚不掌握,也无法利用磁强计。可利用的导航手段包括利用火星表面着陆器或火星车作为基站,进行相对无线定位;或基于“惯性导航敏感器+外测敏感器”等多源信息融合技术,获取相对当地的位置、速度等信息,如相对火星表面速度的测量可以基于“视觉+超声波+惯导”的策略。
(2)控制:机翼、尾翼的折叠展开过程中,外形的变化会导致气动载荷和机翼结构刚度变化,气动力和结构变形相互耦合引起局部非定常流动,增加了不稳定性,控制系统须进行气动特性与姿态控制一体化设计,保证飞行稳定性和期望的飞行品质。对于采用火箭推进系统为动力的飞行器,还须要占空比调节等控制策略,保证飞行高度的稳定控制。
4)火星低空飞行器释放方式
火星低空飞行器的释放方式与所选择的飞行器形式相关。
对于进入过程释放方式,通常适用于固定翼飞行器、浮空气球,其在距离火星表面一定高度后,从火星进入舱释放实现自主飞行。能否在合适时机释放、机翼能否可靠折叠与展开,决定了能否实现正常飞行。
对于着陆后起飞释放方式,几乎可以覆盖所有飞行器形式。其中对于固定翼飞行器,由于没有起飞滑跑距离提供初速条件,通常须要采用一定的发射系统将飞行器发射至特定高度,满足速度和迎角条件后实现飞行器平飞。
5)系统轻小型化集成设计技术
火星低空飞行器更适用于辅助火星车路径规划、实现多点采样等任务,其系统规模通常较小,最大不超过几十千克量级,类似于微纳卫星规模。目前在航天器、地面无人机轻小型化设计方面,微型机电系统(MEMS)技术的应用正逐步扩大。其在小型、微型和变体折叠机翼无人飞行器上的应用,不仅可极大降低飞行器成本和质量,而且具备抗高过载特点。
MEMS已经成功应用于诸如流动控制、机翼外形主动变形驱动、结构破损检测和微型扑翼控制等方面。须要进一步推动MEMS向微型化、集成化和低功耗的方向发展,为火星飞行器提供轻质高效的动力和感知能力。
3.3 地面试验验证
对于火星飞行器目前的地面验证主要包括风洞试验和外场飞行试验两种。
1)风洞试验
风洞设备主要支持验证飞行器的气动性能,但常规风洞都是针对满足地球大气条件设计的飞行器,其雷诺数包络普遍偏大,不能满足火星飞行器低雷诺数条件的验证需求,必须研制针对火星大气环境的火星风洞试验设备,目前仅日本和美国建有相关的风洞试验实施设备。其特点主要包括[21]:
(1)为了研究马赫数、雷诺数和比热对火星飞行器翼形的影响,要求风洞的总压、总温和气体介质能在一定范围调整;
(2)试验马赫数、雷诺数应达到火星表面正常飞行条件;
(3)为了准确评估翼型性能,风洞的湍流度要足够低。
2)外场高空试验
除风洞试验外,更有效的验证方式是开展外场飞行试验。根据地球附近大气环境,高度在30 km附近的大气密度与火星表面相近,适宜开展火星低空飞行器的技术验证。目前国外普遍的发射方式是利用火箭弹或高空气球发射并释放。前面介绍的ARES飞行器就已经完成了全尺寸和半尺寸样机的高空飞行试验。但这种试验的特点是规模大、运输载具复杂、成本高,通常适于系统性验证,飞行器全面的气动性能参数的获取还须依赖于风洞等基础设施。
4 思考与建议
从国外火星低空飞行器的发展可以总结出以下技术发展思路:
1)根据未来探测任务定位和技术难度选择火星低空飞行器技术形式
对于一次性详查或技术验证任务,特别是对着陆巡视不易到达的多山、丘陵等复杂地形探测,宜采用固定翼飞行器或浮空气球,这两种形式对地球航空器的继承性较强且易于研制。固定翼飞行器易于开展定点目标短时中高分辨率遥感详查;浮空气球工作时间相对较长,但可控能力与载荷搭载能力很低,适于非定点目标普查。
若需长期配合火星车工作,要求可多次重复起降,这时旋翼、扑翼、倾斜旋翼是较好形式。对于旋翼,在极低火星大气密度下,为提高升力只能采用高转速,功率需求大,同时桨尖峰值速度控制在0.8Ma以下,避免跨音速阻力和转轴载荷过大;还须在满足结构强度要求下,采用轻质结构材料和高度集成设计来降低桨叶密度和机体质量,保证足够升力和带载能力。倾斜旋翼高转速工作时间短,大部分时间以低转速牵引固定翼飞行,降低了长期大功率需求,但设计时须充分考虑倾转过渡时复杂飞行动力学特性,并且仍无法回避旋翼固有问题。扑翼机尽管在低雷诺数下升阻比高,但须解决高频扑动引起的非定常空气动力学环境、高功率需求、复杂结构刚度设计等诸多难题,目前仍处于概念论证,地球表面扑翼机尚未达到实用阶段。
2)加强基础理论研究及部分类型飞行器的工程样机研制
对于固定翼飞行器,由于在火星表面飞行的可行性较强,应重点开展面向工程应用的研究,可以并行论证不同规模、无动力和有动力的固定翼飞行器。基于地球固定翼飞行器外形、翼型开展优化,及早开展飞行样机的风洞验证,研究确定机体与机翼气动外形与核心空气动力学参数,并通过高空飞行试验对释放与飞行性能进行系统性验证。对技术门槛高的旋翼、扑翼等形式,重点开展决定在火星表面飞行可行性的技术难点攻关,通过理论仿真分析与阶段性原理验证试验递进突破与验证关键技术,其在验证上的优势是飞行速度很低,只需要低气压环境,不需要模拟特殊流场,飞行环境易于模拟。
3)加强相关共性及前沿技术研究与应用
火星低空飞行器对轻质机体、动力系统有极为苛刻的要求,因此必须加强轻质高强度材料、轻小型集成设计、MEMS器件、高功率质量比供电部组件等基础共性技术研究,为未来工程应用进行技术积累。积极实现立方体卫星、动力结构一体化、高强轻质复合材料、石墨烯、火星表面资源利用等前沿技术在该领域的应用,立足更高起点开展研究,可以在与国外技术追赶中实现“弯道超车”,并以工程应用带动新技术的发展。
4)逐步加强地面试验条件建设
必须建立适于火星低空飞行器验证的小规模风洞设施,模拟火星表面低雷诺数工作条件,从而获取飞行器第一手气动数据;同时研制在地球高空飞行试验的载具平台,如高空火箭弹、小型无人机、回收降落伞等设备,更好服务于地面验证。
5)通过国际合作降低成本与风险
针对旋翼、扑翼这类技术难度较大的技术形式,可以开展国际交流,尽可能获取国外研究的技术经验。还可以利用国外成熟的试验实施开展关键技术验证,甚至联合开展攻关研制,有利于加快技术途径选择,缩短技术摸索的周期,降低研制成本。
5 结束语
本文探讨了国外火星低空飞行器技术发展动向,对主要关键技术进行了分析,提出了发展建议,可为后续我国火星探测任务提供参考借鉴。根据国外技术发展综合来看,火星固定翼飞行器研制最早,技术成熟度最高,工程可实现性最好,而其它形式飞行器大多仍处于概念设计论证阶段。可以预见,固定翼飞行器仍是未来火星飞行器发展的主要方向,容易以较低投入获取较高的工程与科学收益。因此,我国应在服务于探测需求的基础上,立足自身研制并争取国际合作,以固定翼飞行器起步开展工程研制,对其它形式飞行器重点开展顶层理论与核心技术论证,解决方案可行性,并且加强共性基础及前沿技术研究与地面验证条件建设。
References)
[1] Jeffery L Hall,Michael T Pauken,Viktor V Kerzhanovich,et al. Flight test results for aerially deployed Mars balloons[C]//AIAA Balloon Systems Conference.Washington D.C.:AIAA,2007
[2]Robert D Braun. Design of the ARES Mars airplane and mission architecture[J].Journal of Spacecraft and Rocket,2006,43(5):1026-1034
[3]Paul Patton. Helicopter drones on Mars[EB/OL].[2016-04-11]. http://www.universetoday.com/119361/helicopter-drones-on-mars/
[4]Bar Cohen,A Colozza M Badescu,S Sherrit,et al.Biomimetic flying swarm of entomopters for Mars extreme terrain science invesigations[J].Lpi Contributions,2012:4075
[5]Nathan Collins,Craig Underwood,Vaios J Lappas. Design of an autonomous Y-4 tilt-rotor(Y4TR) aerobot for flight on Mars[C]//65thInternational Astronautical Congress.Toronto,Canada:International Astronautical Federation,2014
[6]吴耀,姚伟,王超,等.气球型深空探测器技术研究进展[J].航天器工程,2014,23(6):105-113
Wu Yao,Rao Wei,Wang Chao,et al.Progress of balloon technologies for deep space explorer[J].Spacecraft Engineering,2014,23(6):105-113 (in Chinese)
[7]Jeffery L Hall,Michael T Pauken,Viktor V Kerzhanovich.Flight test results for aerially deployed Mars balloons[C]// AIAA Balloon Systems Conference. Washington D.C.:AIAA,2007
[8]李达仁,俞宜震,孙大龙.牵引模型滑翔机和橡筋模型飞机[M].北京:航空工业出版社,2012
Li Daren,Yu Yizhen,Sun Dalong. Tractionmodel glider and rubber string model aeroplane [M].Beijing: Aviation Industry Press,2012 (in Chinese)
[9]Jekan Thanga,Jim Bell. Mars EDL CubeSat mission[EB/OL].[2016-04-12].https://www.nasa.gov/centers/armstrong/features/mars_airplane.html
[10] Christopher A Kuhl. Design of a Mars airplane propulsion system for the Aerial Regional-Scale Environmental Survey (ARES) mission concept[C]//44th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit. Washington D.C.:AIAA,2008
[11]Christopher A Kuhl,Steven W Gayle,Craig A Hunter,et al. Trade study of multiple thruster options for the Mars airplane concept,NASA/TM-2009-215699 [R]. Washington D.C.:NASA,2009
[12]Hiroki Nagai,Akira Oyama. Development of Japanese Mars airplane[C]// 67thInternational Astronautical Congress. Guadalajara,Mexico:International Astronautical Federation,2016
[13]昂海松,肖天航,郑祥明,等.微型飞行器设计导论[M].西安:西北工业大学出版社,2012
Ang Haisong,Xiao Tianhang,Zheng Xiangming,et al. Design introduction of MAV[M].Xi’an: Northwestern Polytechnical University Press,2012 (in Chinese)
[14]Jason L Forshaw,Vaios J Lappas.Architecture and systems design of a reusable Martian twin rotor tailsitter[J]. Acta Astronautica,2012,80:166-180
[15]昂海松,周建江,曹云峰,等.微型飞行器系统设计[M].北京:科学出版社,2014
Ang Haisong,Zhou Jianjiang,Cao Yunfeng,et al. MAV system design[M].Beijing: Science Press,2014 (in Chinese)
[16]陈文元,张卫平.微型扑翼式仿生飞行器[M].上海:上海交通大学出版社,2010
Chen Wenyuan,Zhang Weiping. Mini-flapping wing bionic aircraft [M].Shanghai: Shanghai Jiaotong Unversity Press,2010 (in Chinese)
[17]Liu Hao,Hikaru Aono,Hiroto Tanaka. Bioinspiredair vehicles for Mars exploration[J].Acta Futura,2013(6):81-95
[18]Anthony Colozza.Anentomopter for flight on Mars[C]//NIAC Fellows Conference. Washington D.C.:NASA Ames Research Center,2001
[19]Festo.Festo website introduction[EB/OL].[2016-04-11].http://www.festo.com.cn
[20]Daniel A Reasor,Raymond P LeBeau,Suzanne Weaver Smith. Flight testing and simulation of a Mars aircraft design using inflatable wings[C]//45th AIAA Aerospace Sciences Meeting and Exhibit. Washington D.C.:AIAA,2007
[21]战培国.国外火星飞机及火星风洞研究[J].航空科学技术,2011(3):10-12
Zhan Peiguo.Review of Mars airplane and Mars wind tunnel[J].Aeronautical Science and Technology,2011(3):10-12 (in Chinese)
(编辑:李多)
Research of Technology Development for Martian Low-altitude Vehicles
DONG Jie1RAO Wei1MENG Linzhi1WANG Chuang1YANG Chao2WAN Zhiqiang2JIANG Chongwen2
(1 Beijing Institute of Spacecraft System Engineering,Beijing 100094,China) (2 School of Aeronautic Science and Engineering,Beihang University,Beijing 100191,China)
The development of foreign technology types of Martian aircrafts,including balloon,fixed wing aircraft,rotorcraft,flap wing aircraft and tilting rotor, are investigated and analyzed.It summarizes the key technologies(including aerodynamic shape design at low Reynolds number,power system,automatic flight navigation and control,etc) and the trend of the Martian aircrafts in the future. Finally the recommendations of the Martian aircrafts are proposed.
Mars; vehicle; low Reynolds number
2016-05-13;
2016-10-21
董捷,男,高级工程师,从事深空探测器总体设计工作。Email:donghn13@163.com。
V476
A
10.3969/j.issn.1673-8748.2017.01.016
