国外新一代载人飞船减速着陆技术研究
2017-04-19雷江利荣伟贾贺王飞赵广秀
雷江利 荣伟 贾贺 王飞 赵广秀
(北京空间机电研究所,北京 100094)
国外新一代载人飞船减速着陆技术研究
雷江利 荣伟 贾贺 王飞 赵广秀
(北京空间机电研究所,北京 100094)
新一代的载人飞船向着多功能化、多任务目标适应性的方向发展,可重复使用性和精确着陆的要求逐步提高。文章介绍了美国多用途乘员飞行器(MPCV)、乘员航天运输-100飞船(CST-100)、龙(Dragon)飞船,以及俄罗斯新型载人航天运输系统(PPTS)等典型的新一代载人飞船的减速着陆技术;主要研究了降落伞系统、减速着陆工作程序及着陆缓冲系统;分析了在气动减速和着陆缓冲方面采用的群伞技术、着陆缓冲技术、精确着陆控制技术;提出我国在新一代载人飞船研制时应大力开展群伞系统、大载重着陆缓冲系统的研制,并进行减速与着陆缓冲系统地面试验和空投试验技术的研究。
载人飞船;减速着陆;气动减速;着陆缓冲
1 引言
航天器减速着陆技术是指利用可展开式气动减速装置或着陆缓冲装置,通过特定的控制手段,使需要返回或着陆的有效载荷减速与缓冲,直至按预定的程序和目的安全着陆,并可通过标位手段确保有效载荷顺利收回的技术,是航天技术重要的组成部分,也是促进空间技术发展必不可少的关键技术之一。它是一门综合性工程技术,涉及到总体设计、结构机构设计、防热设计、气动力减速技术、着陆缓冲技术、火工装置技术、无线标位技术、控制及供配电技术等。
载人飞船减速着陆技术是载人航天的关键技术之一,从20世纪60年代开始获得持续的研究投入和应用发展。近年来,随着月球探测、小行星探测、深空探测逐渐成为全球载人航天活动的重要发展方向,主要航天国家均积极开展新型可重复使用的多用途载人飞船研制或研究论证,美国、欧洲及俄罗斯的新型载人飞船都取得了一定的进展。美国多用途乘员飞行器(MPCV)将在2020年把人类再次送往月球,并用于执行火星、小行星及深空探测任务[1]。MPCV飞船采用群伞气动减速、海上溅落的减速着陆方式[2]。乘员航天运输-100(CST-100)是波音公司正在研制的低地球轨道载人飞船,其乘员舱设计可重复使用10次,采用群伞系统气动减速和气囊缓冲的减速着陆方案[3]。龙(Dragon)飞船是太空探索技术公司(SpaceX)在NASA的“商业轨道运输服务”(COTS)计划背景下开展研制的。与龙一货运飞船采用群伞系统减速、水面溅落的着陆方式不同,龙二载人飞船采用变推力反推发动机减速和着陆支架缓冲相结合的着陆方式,而降落伞仅作为备份装置,在正常返回时不打开工作。乘员空间运输系统(CSTS)是俄罗斯与欧洲合作研制的飞船项目,可以将6名航天员送入低地球轨道,将4名航天员送入月球轨道[4-5]。
新一代的载人飞船正向着多功能化、多任务目标适应性的方向发展,可重复使用性和精确着陆的要求逐步提高。随着返回舱质量的进一步增加,群伞系统气动减速技术获得了更多的关注;节省成本和可重复使用的需求,也对着陆缓冲技术提出了更高的要求。本文主要综述近几年国外载人飞船减速着陆技术方面的进展,分析其特点和采用的关键技术,提出我国载人飞船研制需要关注的方面和建议,可为我国减速着陆技术的发展和研究规划的制定提供参考。
2 美国MPCV飞船
MPCV飞船可搭乘4人并在6个月内飞抵火星,是未来开展深空探测的全新运输系统,其设计继承了阿波罗(Apollo)飞船的成熟方案,返回舱质量达到8600 kg,返回舱构型如图1所示。从2011年开始,洛马公司负责研制飞行试验器,在2014年12月进行了第二宇宙速度返回的飞行试验(EFT),图2为飞行试验时返回舱在海上溅落回收。
2.1 降落伞系统
MPCV飞船降落伞系统包括前端防热罩伞、减速伞、引导伞及主伞,主要参数见表1[6]。
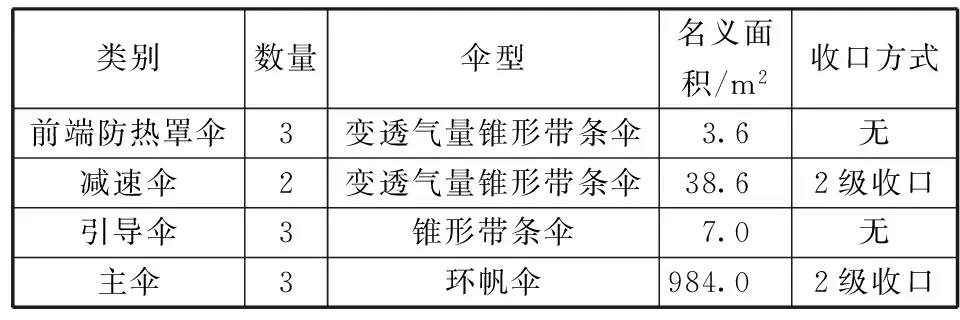
表1 MPCV飞船降落伞系统主要参数Table 1 Main parameters of MPCV parachute system
正常情况下,MPCV飞船着陆速度不大于7.5 m/s,1具主伞失效时的最大着陆速度不大于10.0 m/s,在1具减速伞和1具主伞失效的情况下能够确保返回舱安全着陆。图3为主伞正常工作情况下的空投试验,可以看出,3具主伞最下面的一环伞衣设计了一些几何开孔,用来减小阻力面积,提高舱伞系统在最终下降段的稳定性。图4为1具主伞完全失效情况下的空投试验,可以看出,另外2具主伞仍可正常充气展开工作。
减速伞和主伞在设计时考虑了1具伞收口失效导致提前充气引起的各伞之间充气干扰,以及开伞载荷分布不均的情况,并对收口失效情况下的开伞充气过程及各伞之间的相互影响情况进行了研究和试验验证。图5为1具主伞的1级收口失效导致快
速充气时的空投试验,提前充气的主伞承受的最大开伞载荷约占总载荷的43%,要比其余伞大约35 kN。图6为1具主伞的2级收口失效导致快速充气时的空投试验,提前充气的主伞承受的最大开伞载荷约占总载荷的85%,要比其他伞大约106 kN[7-8]。
2.2 减速着陆工作程序
MPCV飞船正常返回时的工作程序如图7所示。通过静压高度控制器判断开伞高度,根据工作程序设计在预定高度处先弹射3具前端防热罩伞,在前端防热罩分离后2具减速伞分别弹射拉直,减速伞通过2级收口阶段进行充气控制。减速伞分离后3具引导伞弹射拉直,并分别将3具主伞拉出,主伞通过2级收口阶段进行充气控制[6],3具主伞采用了单独拉出的方式开伞。为了满足最低开伞高度要求,在上升段、低高度逃逸救生的情况下,减速伞是可以不工作的,而是采用前端防热罩分离后直接弹射引导伞拉出主伞的开伞方式。
MPCV飞船降落伞的开伞时刻选择是由返回舱的姿态角和所处的高度共同决定的,满足以下两个条件之一时开伞控制系统就会发出动作指令[8]:①俯仰角和偏航角的和方根(RSS)值达到门限值,并且返回舱高度在设定的上下限范围内;②RSS值没有达到门限值,但返回舱高度已经低于设定的下限值。
考虑到减速伞工作时返回舱存在俯仰和偏航角速率,如果在角速率较大的时候脱掉减速伞,则返回舱可能会出现翻滚及小头朝前的姿态,不利于主伞开伞。因此,开伞控制系统检测返回舱的俯仰和偏航角速率,并根据返回舱高度在合适的时机发出减速伞脱伞指令,如图8所示。图8中,红点代表RSS值的最大值,绿点代表最小值,RSS值的波动比是指最小值与最大值的比值。当该波动比小于预设值且返回舱高度在设定的范围内,开伞控制系统发出脱减速伞指令(图中上升段的预设值为0.0,下降段的预设值为0.5,只允许指令在波动比的下降段输出)[9],并延迟一定时间后发出引导伞开伞指令,引导伞开伞后将主伞拉出。
2.3 着陆缓冲系统
ILC多佛(ILC Dover)公司和北美空降系统(Airborne Systems North America,ASNA)公司分别完成了Gen1和Gen2气囊缓冲系统的研制和验证,2种气囊的主要参数见表2,安装布局位置见图9[10]。不同布局位置的气囊压力和排气口设计参数不同,以提高缓冲效率,且有利于返回舱姿态稳定。
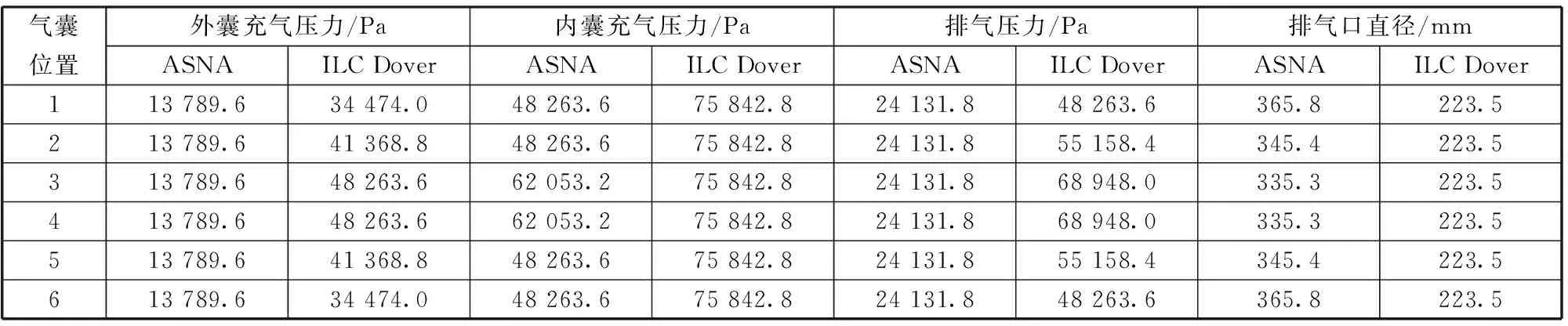
表2 Gen2气囊参数Table 2 Gen2 airbig parameters
在MPCV飞船研制初期,NASA为了提高返回舱的可重复使用性而选择了陆上着陆的方式,并对着陆反推发动机缓冲和气囊缓冲2种方案进行了对比论证。由于气囊缓冲不必额外增加低高度控制器,且返回舱重复使用性更好,因此在2种方案的质量相差不大的情况下选择气囊缓冲方案。
随着项目的推进,返回舱质量不断增加(Gen2气囊试验时为7253 kg,2014年12月飞行试验时为8600 kg),超出了飞行任务规定的范围,因此NASA重新对着陆方案进行了评估。评估分析认为[11]:①由于大气密度的差异,陆上着陆时降落伞的稳降速度要大于水上着陆时的稳降速度;②陆上着陆时的航程较长,导致推进剂增加,对着陆精度要求较高;③陆上着陆时,为了安装着陆缓冲系统,返回舱的密封舱和大底布局设计需要调整;④陆上着陆时的返回舱质量比水上着陆时要大约760 kg,对陆上着陆时所带来的返回舱的重复使用效果和付出的成本代价争议较大。根据评估结果,从返回舱减小质量的角度出发,NASA最终选择了水上溅落的着陆方案。
不论是水上溅落方案,还是陆上着陆时的发动机和气囊缓冲方案,MPCV飞船着陆时返回舱姿态精确控制都具有可行性,即根据GPS测量的返回舱水平速度方向和惯性测量单元(IMU)测量的返回舱姿态数据,通过调整返回舱着陆姿态[12],确保着陆时:①返回舱以较好的着陆姿态着陆,避免翻转或倾倒;②航天员承受的冲击过载方向满足设计要求,即保证脚部朝向水平速度方向。尽管这种控制方案对返回舱结构的优化设计较为有利,且有助于减小返回舱的质量,在现有的布局下也可以实现,但是这种主动姿态控制系统要增加额外的推进剂,在大气层内的效率较低,对GPS系统的可靠性要求高,以及对着陆环境具有敏感性,因此MPCV飞船在飞行试验时并没有采用这种方案,而是沿用了类似Apollo飞船的被动控制方案[12]。
3 美国CST-100飞船
CST-100是波音公司正在研制的低轨道载人飞船,其设计继承了Apollo飞船、乘员探索飞行器(CEV)飞船、轨道快车(Orbital Express)卫星等的技术和方案。返回舱具备可重复使用性,设计使用10次。CST-100飞船采用群伞减速和气囊缓冲着陆的减速着陆方案,选择陆上为主着陆场,海上为副着陆场,并配有气囊扶正系统[3]。
3.1 降落伞系统
CST-100飞船的降落伞系统由2具前端防热罩伞、2具减速伞、3具引导伞和3具主伞组成。减速伞和主伞均采用冗余设计,即1具减速伞、2具主伞正常工作即可实现返回舱安全着陆。降落伞系统主要参数如表3所示。

表3 CST-100飞船降落伞系统主要参数Table 3 Main parameters of CST-100 parachute system
CST-100飞船的降落伞系统设计充分继承了MPCV飞船的方案。其前端防热罩伞是在MPCV飞船引导伞的基础上增加了收口措施,以减小开伞载荷;减速伞采用了相同的可变透气量锥形带条伞;主伞名义面积为789.0 m2,是在MPCV飞船主伞的基础上进行了改进设计[3]。
3.2 减速着陆工作程序
CST-100飞船减速着陆时,首先2具前端防热罩伞在约6100 m的高度上弹射开伞,充气工作一段时间后4个解锁螺栓动作,使前端防热罩随防热罩伞一起与返回舱分离;随后弹射2具减速伞,减速伞工作后对返回舱进行减速并稳定返回舱的姿态;在约2500 m高度,减速伞与返回舱分离,3具引导伞弹射开伞并拉出3具主伞;主伞工作稳定后,旋转接头释放,返回舱进行吊挂转换,由单点吊挂转为双点吊挂,为气囊系统工作创造条件;在约900 m高度时,抛掉返回舱防热大底,缓冲气囊充气展开,为返回舱着陆缓冲作好准备。减速着陆过程如图10所示。
3.3 着陆缓冲系统
CST-100飞船的缓冲气囊由6个布置在大底外沿周向的组合式气囊和一个中心气囊组成,布局及展开状态示意见图11和图12。组合式气囊分为外囊和内囊两部分,呈圆柱状外形,外囊直径为1320 mm,设有2个排气孔;内囊为密封型气囊,用于对外囊缓冲后的剩余垂直速度进行进一步的缓冲,并使返回舱底部与地面隔离,且返回舱可以通过内囊在地面上滑行。组合式气囊通过高压气瓶充气展开,每个气囊均可通过智能控制的阀门单独进行充气,着陆缓冲时采用主动式的排气控制,通过电动切割器打开排气口。中心气囊用于降低水面着陆时返回舱大底结构受到的冲击载荷[13]。中心气囊为自充气式气囊,由于陆上着陆时中心气囊会降低返回舱着陆的稳定性,因此在陆上着陆时是不充气展开的。在水上着陆时,中心气囊通过连接在外部气囊上的连接带在外部气囊充气展开时被动拉开[14]。
波音公司对缓冲气囊在陆上和水上着陆时的冲击过载进行了仿真计算和试验。陆上试验时,模拟主伞正常(垂直速度8.0 m/s、水平速度12.0 m/s)和1具主伞失效(垂直速度10.0 m/s、水平速度6.2 m/s)的情况,分别见图13(a)和图13(b)。图中,X向沿返回舱轴向,Y向和Z向为返回舱横向;TX,TY,TZ分别表示X,Y,Z向过载的试验结果,AX,AY,AZ分别表示X,Y,Z向过载的仿真计算分析结果。可以看出,1具主伞失效时,陆上着陆时的X向过载峰值在10gn左右,Y向和Z向的在2gn左右;正常情况下,X向过载峰值在8gn左右,Y向的在3gn左右,Z向的在0.5gn左右[14]。水上着陆试验时,模拟返回舱以15°倾角从7.5 m高处自由落下(着水时垂直速度12.0 m/s),试验结果见图14,其中,X向沿返回舱轴向,最大轴向过载为15.4gn[14]。
4 美国龙飞船
美国SpaceX公司的龙系列飞船目前包括龙一和龙二。龙一飞船为载货型,目前已完成了数次的飞行试验,并成功与“国际空间站”(ISS)对接,为其运送货物、补给物资及下行物品。在龙一飞船的基础上,SpaceX公司研制了龙二飞船,它可承载7名航天员,采用了一系列的先进技术和新的定点着陆理念,如变推力发动机,与防热大底一体化设计的可伸缩式的着陆支架。
4.1 降落伞系统
龙飞船的降落伞系统由2具减速伞和3具主伞组成,单具主伞名义面积为984.0 m2,与MPCV飞船的主伞相同。返回舱的下降速度为4.9~5.5 m/s。在1具主伞失效时,其余2具主伞仍然可以保证返回舱安全着陆。
龙一飞船的减速伞、主伞都布置在返回舱下部,这种设计减小了返回舱上部空间的布局难度,能降低返回舱的重心高度。减速伞和主伞的吊带都布置在防热层下的预埋槽里,通过拉豁预埋槽的表面防热层拉出。相对于龙一飞船,龙二飞船对减速伞的安装位置进行了调整,2具减速伞移到了返回舱的上部,主伞仍布局在返回舱下部,位于减速伞正下方[15]。
4.2 减速着陆工作程序
龙二飞船2具减速伞单独弹射开伞,减速伞分离时将主伞吊带预埋槽的防热层拉脱并将主伞从伞舱中拉出,开伞过程见图15。 龙二飞船与龙一飞船一样,主伞采用集群出伞的方式,与MPCV飞船和CST-100飞船的主伞开伞方式相比,这种出伞方式的开伞同步性较高,且有利于节省质量,但伞包的拉出过程相对复杂。
4.3 着陆缓冲系统
不同于龙一飞船的水上溅落方式,龙二飞船采用陆上着陆,通过变推力反推发动机减速和着陆支架缓冲的方式着陆。龙二飞船的4台着陆反推发动机进行第一阶段的减速,在返回舱底部布置有弹伸式的着陆支架,对返回舱进行最终的着陆缓冲,着陆支架如图16所示。可以看出:着陆支架采用弹伸式的展开方式,足垫在支架展开前是作为大底防热层的一部分,这种设计在着陆支架展开时不用抛掉返回舱的防热大底。
5 其他飞船
5.1 俄罗斯与欧洲合作研制的CSTS飞船
CSTS是俄罗斯与欧洲合作研制的飞船项目,可以将6名航天员送入低地球轨道,将4名航天员送入月球轨道[1]。CSTS飞船在返回时不采用降落伞进行气动减速,而是使用12台发动机减速并通过着陆缓冲支架实施软着陆。飞船在距离着陆点600~800 m高度时发动机点火,垂直下降后,将在距着陆点30 m高度时开始执行精确着陆,然后采用4组着陆缓冲支架进行缓冲。在初始状态,着陆缓冲支架折叠在返回舱大底上方,当抛掉大底之后,着陆缓冲支架展开[16]。
5.2 俄罗斯新型载人航天运输系统
俄罗斯的新型载人航天运输系统(PPTS)是CSTS飞船的更新方案。能源公司称新飞船为新一代有人驾驶运输飞船(PTK-NP),也有人称为罗斯号[1],该飞船将用于替换俄罗斯目前使用的联盟号载人飞船。
PTK-NP飞船采用降落伞与发动机相结合的减速方式,以3具降落伞气动减速为主,以发动机推进式减速为辅。不同于联盟号飞船使用的在触地前瞬间点火的小型软着陆发动机,PTK-NP飞船的发动机还具有精密的推力控制及更强的着陆速度控制能力,预计着陆精度可达2.0 km。PTK-NP飞船返回舱底部安装有可折叠的着陆支架,用于返回舱着陆缓冲,如图17所示。着陆时质量约为7300 kg,最大垂直加速度为7gn,最大水平加速度为5gn。返回舱可重复用于10次飞行任务[17]。
5.3 亚轨道运输系统
日本计划在2022年前用载人飞船或小型航天飞机送航天员上天,并着眼于在更长远的未来发展点对点的亚轨道运输系统。这种飞船或小型航天飞机可乘3人,并可携带质量达400 kg的货物。小型航天飞机质量约为12 000 kg,可在分布于全球的5条合适的跑道上着陆,还能在海上溅落。关于载人飞船,日本宇宙航空研究开发机构(JAXA)正在考虑7000 kg型和8000 kg型两种。7000 kg型飞船采用普通降落伞着陆方式,而8000 kg型飞船将采用机动性更好的翼伞着陆方式,以提高着陆精度[18]。
6 减速着陆关键技术分析
新一代的载人飞船研制针对多用途、多任务适应性需求,采用了大量的新技术、新方法。从美国MPCV飞船的研制可以看出,其着陆方式表面上是继承了Apollo飞船的成熟技术和方案,但实际上提出了更高的性能指标要求。俄罗斯新的飞船项目也经历了几个阶段的变化,设计理念也不尽相同。总体来看,新一代载人飞船减速着陆技术呈现出以下几个方面的特点[19-20]。
(1)大质量返回舱的降落伞均采用群伞系统。5000~10 000 kg返回舱一般采用2具减速伞、3具主伞组成群伞,主伞伞型为环帆伞。减速伞和主伞的设计均考虑冗余备份的可靠性要求,在1具减速伞和1具主伞失效的情况下仍能保证返回舱安全着陆,开伞程序控制技术与返回舱姿态控制技术进一步深入结合。在降落伞的设计方面,群伞系统与单伞系统也有一定的区别,群伞系统在充气过程控制、开伞同步性控制及伞系的稳定性方面有更高的要求。主伞普遍采用了多级收口的开伞过程控制技术,提高各伞之间充气的一致性,确保各伞的开伞载荷基本一致,此外,还可以通过采用伞顶撕裂带的方式控制主伞的充气过程。MPCV飞船主伞最下面的一环伞衣上设计了一些几何开孔,用来减小阻力面积,提高舱伞系统在最终下降段的稳定性。
(2)着陆缓冲主要采用气囊和着陆支架2种方式,但着陆支架一般与变推力发动机减速相结合。气囊缓冲方案可以兼顾水上和陆上2种着陆方式,稳定性和环境适应性高于着陆支架,对返回舱的重复使用更加有利。在气囊缓冲技术方面,为了更好地控制返回舱着陆时的过载并提高稳定性,气囊采用了主动排气的控制方式。针对安装在不同位置的气囊,分别设置其充气压力、排气压力和排气口的直径等参数,可以有效地控制缓冲过程,提高返回舱的着陆稳定性。同时,采用组合式气囊的方案,缓冲结束后通过不排气的内囊对返回舱形成支撑,能有效地保护返回舱结构,有利于返回舱的重复使用。
(3)采用精确着陆控制设计。变推力发动机与着陆支架相结合的方案具备一定的定点着陆能力,发动机推力控制技术是精确着陆控制的核心关键技术。SpaceX公司的龙二飞船采用了这一技术,须要突破发动机精确推力控制、变矢量推力控制等技术。
目前,国外正在研制的载人飞船和相关概念研究提出的减速着陆方式对比,见表4。

表4 载人飞船减速着陆方式比对Table 4 Comparison of descent and landing methods of manned spacecraft
7 启示与建议
我国新一代载人飞船的研制工作已经开始,结合目前国外减速着陆技术的进展,在研制中须要关注以下几项关键技术。
(1)突破群伞系统开伞和充气同步性控制技术,以及群伞开伞过程仿真分析技术。群伞中各个组成伞的充气过程是否同步,很大程度上决定了群伞系统整体性能的优劣。由于群伞间还存在复杂的相互干扰,数值建模难度大,仿真分析涉及气动、结构、刚体动力学等多个学科,目前国内的相关研究尚处于起步阶段,须要开展深入的研究。
(2)返回舱的重复使用设计,对返回舱的着陆稳定性提出了更高的要求,应尽量避免返回舱倾倒。采用气囊缓冲时,须要对气囊的排气时机、排气方式、排气压力等参数进行合理设计,提高着陆缓冲过程的稳定性;应对大载重气囊主动排气控制技术、气囊着陆稳定性设计技术、气囊折叠包装及快速充气展开技术进行攻关突破。
(3)发展大载重着陆支架承力结构设计及新型缓冲材料技术。目前,常用的缓冲器有液压/气压缓冲器、金属变形缓冲器、铝蜂窝缓冲器、机械式缓冲器和磁流变液缓冲器等几种类型。磁流变液缓冲器虽然还处于试验研究阶段,但其体积小,质量小,缓冲后可恢复,能多次使用,具有很好的应用前景。另外,可通过结构优化设计,提高采用蜂窝缓冲器的着陆支架的重复使用性能,降低研制成本。
(4)大型返回舱地面着陆缓冲试验模拟和大尺寸返回舱空投试验技术。我国新一代载人飞船返回舱质量达到7000 kg,最大直径约为4 m,远远超出了神舟飞船的返回舱质量及尺寸。我国目前的大型运输机尚不具备全尺寸模型投放的条件,这种大型返回舱对试验的平台设备、试验模拟技术提出了更高的要求,如何更真实地模拟地面着陆环境、返回舱着陆姿态、开伞条件等,对试验验证的充分性和有效性至关重要。
目前,载人深空探测已成为下一阶段主要航天国家空间探索活动的热点,减速着陆技术作为支撑载人飞行的关键技术之一,因此应尽早进行载人深空探测与返回相关的减速着陆技术研究,鼓励创新,促进减速着陆技术的全方位发展,在着陆缓冲技术、精确着陆与危险避让控制技术、大型群伞技术、可控伞技术、可充气膨胀减速技术等方面,取得更大突破,为我国开展载人深空探测工程奠定坚实的基础。
References)
[1] 张蕊.国外新型可重复使用飞船特点分析和未来发展[J].国际太空,2010(12):31-38
Zhang Rui. Foreign new reusable spacecraft characteristics analysis and future development [J]. Space International, 2010(12): 31-38 (in Chinese)
[2]Scott D Norris, Paul F Marshall. Orion program status [C]//Proceedings of AIAA Space 2013 Conference and Exposition. Washington D.C.: AIAA,2013: 1-4
[3]John McKinney, Melanie L Weber, Preston Ferguson. Initial testing of the CST-100 aerodynamic deceleration system [C]//Proceedings of AIAA Aerodynamic Decelerator Systems (ADS) Conference. Washington D.C.: AIAA,2013: 2-9
[4]王岩松,张峰,张智慧,等.2012年国外载人航天发展综合分析[J].载人航天,2013,19(1):91-96
Wang Yansong,Zhang Feng,Zhang Zhihui,et al. A comprehensive analysis on the development of worldwide manned spaceflight in 2012 [J]. Manned Spaceflight, 2013,19(1): 91-96 (in Chinese)
[5]高滨.国外载人航天器回收着陆技术的进展[J].航天返回与遥感,2009,30(2):1-9
Gao Bin. An overview of recovery and landing systems for foreign manned spacecrafts [J]. Spacecraft Recovery & Remote Sensing,2009,30(2): 1-9 (in Chinese)
[6]Romero Leah M. CPAS parachute testing, model development, & verification,NASA 20130014013 [R]. Washington D.C.: NASA, 2013: 5-9
[7]Jose G Varela, Eric S Ray. Skipped stage modeling and testing of the CPAS main parachutes,NASA 20130011109 [R]. Washington D.C.: NASA, 2013:2-9
[8]Morris Aaron L,Olson Leah M. Verification and validation plan for flight performance requirements on the CEV parachute assembly system,NASA 20110011441 [R]. Washington D.C.: NASA, 2011:1-6
[9]Brian D Bihari, Charity J Duke, Jeffrey D Semrau. Descent and landing triggers for the Orion multi-purpose crew vehicle,NASA 20130008941 [R]. Washington D.C.: NASA, 2013:2-10
[10] Ben Tutt, Charles Sandy, James Corliss. Status of the development of an airbag landing system for the Orion crew module [C]//Proceedings of AIAA Balloon Systems Conference. Washington D.C.: AIAA,2009:3-9
[11]Christopher J Johnson, Robert A Hixson. Orion vehicle descent, landing, and recovery system level trades [C]//Proceedings of AIAA Space 2008 Conference & Exposition. Washington D.C.:AIAA, 2008: 1-3
[12]Mark A Kane. Orion touchdown heading control,NASA 20100016332 [R]. Washington D.C.: NASA, 2010:1-8
[13]John R Mccann, Todd Depauw, John Mckinney, et al. Boeing CST-100 landing and recovery system design and development an integrated approach to landing [C]//Proceedings of AIAA Space 2013 Conference and Exposition. Washington D.C.:AIAA, 2013:2-13
[14]John Mckinney, Melanie L Weber, Preston Ferguson,et al. Boeing CST-100 landing and recovery system design and development testing [C]//Proceedings of AIAA Aerodynamic Decelerator Systems (ADS) Conference. Washington D.C.:AIAA, 2013:6-25
[15]陈杰.美国“龙”飞船国际空间站对接试验简析[J].中国航天,2012(8):24-29
Chen Jie. The docking test analysis of Dragon and the International Space Station [J]. Aerospace China,2012(8): 24-29 (in Chinese)
[16]阳光.俄罗斯的新载人飞船项目[J].中国航天,2011(7):16-18
Yang Guang. The manned spacecraft project of Russia [J]. Aerospace China,2011(7):16-18 (in Chinese)
[17]武尧尔.俄罗斯全力打造新型载人飞船[J].太空探索,2011(2):30-35
Wu Yaoer. Russia tries its best to build new type manned spaceship [J]. Space Exploration,2011(2):30-35 (in Chinese)
[18]天宇.日希望2022年前发射航天飞机或载人飞船[J].中国航天,2012(11):20-21
Tian Yu. Japan hopes to launch shuttle or manned spaceship before 2022 [J]. Aerospace China, 2012(11):20-21 (in Chinese)
[19]吴伟仁,刘旺旺,唐玉华,等.深空探测几项关键技术及发展趋势[J].国际太空,2013(12):45-51
Wu Weiren, Liu Wangwang, Tang Yuhua,et al. The key technologies and development trend of deep space exploration [J].Space International, 2013(12):45-51 (in Chinese)
[20]韩鸿硕,王一然,蒋宇平,等.国外深空探测器着陆缓冲系统的特点和应用[J].航天器工程,2012,21(6):7-23
Han Hongshuo, Wang Yiran, Jiang Yuping,et al. Characteristics and application of deep-space explorer landing impact attenuation system [J]. Spacecraft Engineering,2012,21(6):7-23 (in Chinese)
(编辑:夏光)
Research on Descent and Landing Technology for New Generation Manned Spacecraft
LEI Jiangli RONG Wei JIA He WANG Fei ZHAO Guangxiu
(Beijing Institute of Space Mechanics & Electricity,Beijing 100094,China)
The new generation manned spacecraft is developing toward the direction of more functional and multiple objectives. The requirements of reusable and precise landing are gradually improved. The paper introduces the descent and landing technologies of the new generation manned spacecraft of the American MPCV(Multi-Purpose Crew Vehicle),CST-100(Commercial Space Transportation-100), Dragon and Russian PPTS (Prospective Piloted Transport System). The parachute system,decent and landing sequence and cushion landing system of these spacecraft are studied. The parachute cluster,cushion landing and precise landing control technologies of the aerodynamic deceleration,descent and landing systems are analyzed. Some suggestions for the development of manned spacecraft of China are proposed, such as developing parachute cluster and cushion landing system, researching the ground test and airdrop test technologies of the decent and cushion landing system, and so on.
manned spacecraft;descent and landing;aerodynamic deceleration;cushion landing
2016-07-06;
2016-12-07
雷江利,男,硕士,高级工程师,从事航天器返回与着陆技术研究工作。Email:lei_jiangli@163.com。
V529.1
A
10.3969/j.issn.1673-8748.2017.01.015
