基于UKF的深井监测移动节点定位算法*
2017-04-16余修武周利兴胡沐芳
余修武,刘 琴,张 枫,周利兴,胡沐芳,张 可
(1.南华大学 环境保护与安全工程学院,湖南 衡阳 421001;2.金属矿山安全与健康国家重点实验室,安徽 马鞍山 243000; 3.湖南省铀尾矿库退役治理技术工程技术研究中心,湖南 衡阳 421001)
0 引言
深井下环境复杂多变,具有高温、高湿、通风性差等特点,使得矿井开采及人员设备管理愈加困难,为保障井下工作的安全有序进行,引入一项重要的现代监测技术,即定位监测技术[1-5]。在正常情况下,可以对人员、矿车等进行实时动态定位监测;一旦发生矿难,可及时定位救援,减少伤亡和损失。矿井巷道信号,尤其在深井中,衰减速度较快,单纯采用接收信号强度(RSSI)测距算法来进行定位[6],其定位精度较低,为提高其定位精度,文献[7]提出了一种锚节点链式部署的动态 RSSI测距定位算法,利用锚节点间距和RSSI来计算巷道实际环境中的路径损耗指数,以此提高RSSI定位精度及对环境的适应性;文献[8]提出了一种动态识别矿井人员的无线全局定位算法,按照巷道的地形特点建立相应的地形模型,结合局部坐标系变换,实现人员无线全局定位,该算法具有一定的定位精度;文献[9]引入卡尔曼滤波,对矿井的移动节点进行定位,通过与弹性粒子型相结合的方式,提高对移动节点的实时定位精度;文献[10]针对井下人员的移动特性与定位精度,提出一种结合运动方程与卡尔曼滤波的移动节点预测算法,定位精度有一定的提高并且能对未知数据进行预测。上述文献均基于线性系统理论,而实际深井定位是非线性系统,本文提出一种基于非线性函数不敏卡尔曼滤波( UKF)[11-13]移动节点定位算法(U-MPA),以进一步减少定位误差。
1 U-MPA监测系统构建
井下环境中,无线传感器网络的锚节点是沿巷道确定性间隔部署的,而移动节点是沿巷道随机游动分布的矿车或人员。U-MPA监测系统拓扑如图1所示,其中矿井外部设置集控中心,与现有工业以太网相连接,传输速度快,安全性高;巷道内,每隔一定间距,在巷道壁上布设1个固定传感器节点(即锚节点),用于实时采集巷道内环境信息,包括:温度、湿度、风速和有害气体浓度等[14];移动传感器节点(即移动节点)由人员佩戴(或安装至矿车),用于实时监测人员(或矿车)周围环境,可以有效地对锚节点间盲区进行监测;集控中心通过移动节点与锚节点构成的定位系统,可以清楚地知道人员(或矿车)的具体位置,一般情况下可用于人员考勤与监控,危急情况下可用于应急定位救援。

图1 矿井U-MPA监测系统拓扑Fig.1 Monitoring system topology of U-MPA in mine
2 U-MPA定位算法
2.1 RSSI测距
RSSI测距的基本原理是:根据收发节点的信号强度,计算信号的传输损耗,再将传输损耗转化为距离。对于节点间的距离选用对数-常态分布模型进行计算,如式(1)所示:
(1)
式中:d表示接收端与发射端的距离,单位为m;d0表示参考距离,通常取d0为1 m;RSSI(d)表示距离发射源d处接收到的信号强度,单位为dBm;RSSI(d0)表示对应d0处待定节点接收到的信号强度,单位为dBm;β表示路径衰减指数,周围环境变化会对其产生很大影响。
为了使得该模型能尽量满足矿井的特殊环境,保证RSSI测距的精度,对RSSI(d0)和β进行优化,得到最佳值。由文献[8]可知,最佳值RSSI(d0)=41,β=2.3。
2.2 UKF节点距离计算
移动节点定位系统是一种非线性系统,为了提高对传感器节点位置的估计精度,采用不敏卡尔曼滤方法对系统进行预估。一般形式的离散非线性系统[15]方程如式(2)所示:
(2)
式中:xk表示k时刻的预估值;F表示系统参数,这里取为1;zk表示k时刻的测量值;H表示测量系统参数,取其为1;Wk和Vk分别表示均值为零的高斯过程噪声和测量噪声,协方差分别为Qk和Rk。
UKF是采用不敏变换来进行递推计算的,经变换后的均值和协方差能够精确地表示。设有均值为μ、协方差为Pk的n维随机变量x,可以得到(2n+1)个采样点χi和对应的权值ωi,如式(3)所示:

(3)
k时刻,第i个采样点χi的计算如式(4)所示:

(4)

(5)
设k时刻采样点j的状态估计向量为Xj(k),协方差为Pj(k),根据式(4)、式(5)计算出样点χj,k-1|k-1和其对应的权值ωj,由式(3)可得到相应样点的一步预测,如式(6)所示:

(6)
式中:χj,k|k-1表示k-1时刻的估计值;zj,k|k-1表示k-1时刻的测量值。
利用式(6)得到的一步预测χj,k|k-1,可得到状态预测估计Xj,k|k-1和状态预测协方差Pj,k|k-1,如式(7)所示:
(7)
则状态测量与相应的协方差如式(8)所示:

综合状态预测估计和状态测量,得到现在状态的最优状态估计Xj,k及其相应的协方差Pj,k,如式(9)所示:

(9)


(10)
式中:Kk为k时刻的卡尔曼增益, 如式(11)所示:
(11)
根据RSSI测距模型和估算值RSSIk|k,由式(1)得锚节点与移动节点的距离,如式(12)所示:
(12)
2.3 移动节点定位
为了更准确地对移动节点进行定位,根据巷道的地形特点建立巷道地形模型及局部坐标系,最终将局部坐标系转化至全局坐标系中,实现对移动节点的定位监测。
按照巷道的地形特点,可以将其分为以下3种模型:直线型巷道模型,如图2(a)所示;凹型巷道模型,如图2(b)所示;凸型巷道模型,如图2(c)所示。
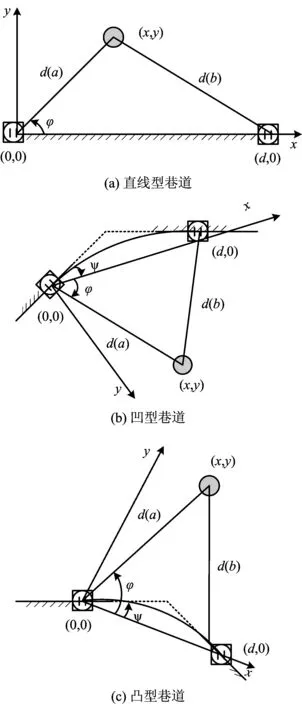
图2 矿井巷道典型地形模型Fig.2 Typical terrain model of mine laneway
根据RSSI测距法,采用屏蔽模型,可以求得移动节点的坐标值,定位算法如式(13)所示:
(13)
式中:d(a)和d(b)表示移动节点到锚节点的距离;d表示2相邻锚节点的距离;φ表示2锚节点连线与移动节点间的夹角。
在进行矿体的开采时,并非所有的巷道均是直线型,可能隔几十米会出现凹凸型的弯道,上述典型巷道模型能够随机组合成一个完整的巷道。为了得到移动节点在巷道中的全局定位,需要将巷道局部坐标系向全局坐标系变换,采用该定位方法,会使得移动节点定位精度得到提高。
3 U-MPA定位算法实现流程
U-MPA定位算法实现过程如图3所示。

图3 U-MPA定位算法流程Fig.3 Flow chart of U-MPA
1)锚节点周期性发送自身ID、信号接收强度RSSI(位置信息)。
2)设置移动节点的信号接收强度RSSI是上一时刻的测量值。
3)经过UKF预估后,得出锚节点与移动节点的距离。
4)为了对移动节点实现更准确定位,引入巷道局部坐标系,对典型巷道进行坐标分析,由此得到移动节点的位置信息。
4 仿真实验
采用MATLAB对U-MPA定位算法进行仿真试验,同时与RSSI定位算法进行比较。在100 m×5 m的矩形区域内进行监测,锚节点沿巷道两侧间隔部署,设锚节点的通信半径为45 m。无线传感器网络在平面的通信半径为100 m左右,而无线信号在深井下传输受环境影响较严重,为了达到较好数据传输,一般选择取小于100 m的一半较好。
4.1 锚节点间隔误差
如图4所示,表示锚节点按不同间隔部署时的定位误差,从中可以看出,随着锚节点的间距增大,节点的定位误差也随之增大。锚节点间距越小,通信范围内移动节点随机分布的范围就小,因此锚节点附近的移动节点定位产生的误差就更小。

图4 定位误差与锚节点间隔密度关系Fig.4 Relationship between positioning error and anchor node spacing density
从图4中的仿真实验结果可以知,U-MPA算法对井下移动节点定位有较好的定位精度,在锚节点间隔密度为35 m和75 m时,U-MPA定位误差分别为2%和25%,RSSI算法定位误差分别为15%和80%;在锚节点间隔45 m时,定位误差为5%,因此可根据定位精度的要求,部署相应数量的锚节点来提高定位精度。
4.2 U-MPA定位偏差

(14)

图5 定位偏差与锚节点间隔密度关系Fig.5 Relationship between positioning deviation and anchor node spacing density
由图5中的仿真实验结果可知,在锚节点间隔密度为0~100 m内,RSSI算法的最大定位偏差14.8 m,U-MPA算法的最大定位偏差7.6 m,为RSSI算法的51%;RSSI算法的平均定位偏差4.8 m,U-MPA算法的平均定位偏差2.1 m,为RSSI算法的44%;U-MPA算法较RSSI算法的平均定位偏差有明显降低。
5 结论
1)根据深井实际环境,以及人员或矿车设备的移动特性,提出一种基于非线性函数不敏卡尔曼滤波移动节点定位算法(U-MPA),经与RSSI定位算法对比仿真,U-MPA定位精度较高。
2)根据仿真计算,在锚节点间隔密度≤100 m时,U-MPA算法的平均偏差-均方根定位误差(RMSE)是RSSI算法的44%;锚节点间隔密度为45 m时,通信性价比较高,U-MPA算法和RSSI算法的定位误差分别为5%和20%,定位精度提高了4倍。
[1]余修武,范飞生,李睿,等.基于接收信号强度分区矿山无线定位算法[J].中国安全生产科学技术,2015,11(9):70-75.
YU Xiuwu,FAN Feisheng,LI Rui,et al.Study on wireless positioning algorithm in mine based on received signal strength partition[J]. Journal of Safety Science and Technology, 2015,11(9):70-75.
[2]冀汶莉,马晴,贾东.井下移动目标定位跟踪关键技术[J].西安科技大学学报,2016,36(1):132-138.
JI Wenli, MA Qing, JIA Dong. Key technology of locating and tracking mobile object in underground mines[J]. Journal of Xi’an University of Science and Technology, 2016,36(1):132-138.
[3]李宁,王李管,贾明涛,等.基于改进遗传算法的矿井人员定位新算法[J].中南大学学报(自然科学版),2016,47(3):929-935.
LI Ning,WANG Liguan, JIA Mingtao,et al.New personnel localization algorithm in mine based on improved genetic algorithm[J]. Journal of Central South University, 2016,47(3):929-935.
[4]Sun J P, Li C X. Mine TOA geometric positioning method based on improved mean filtering and parameter fitting[J]. Meitan Xuebao/journal of the China Coal Society, 2015, 40(5):1206-1212.
[5]黄晓鹏. 无线传感器网络中移动信标节点的路径规划与定位算法研究[D].南京:南京大学,2015.
[6]Ye M, Wang Y P. Location estimation in wireless sensor networks based on probabilistic model with variant variance and evolutionary algorithm[J]. Journal of Software, 2013, 24(4):859-872.
[7]乔钢柱, 曾建潮. 信标节点链式部署的井下无线传感器网络定位算法[J]. 煤炭学报, 2010, 35(7):1229-1233.
QIAO Gangzhu, ZENG Jianchao. Localization algorithm of beacon nodes chain deployment based on coal mine underground wireless sensor networks[J].Journal of China Coal Society,2010,35(7):1229-1233.
[8]王红旗, 刘勇, 罗宇锋. 段序号可动态识别的矿井人员无线全局定位[J]. 计算机工程与应用, 2014, 50(19):245-248.
WANG Hongqi, LIU Yong, LUO Yufeng. Wireless global positioning of mine personnel with dynamically identifiable segmental serials[J]. Computer Engineering and Applications,2014,50(19): 245-248.
[9]王建平,徐恒,李奇越.基于卡尔曼滤波的矿井移动节点定位算法研究[J].电子测量与仪器学报,2013,27(2):120-126.
WANG Jianping,XU Heng,LI Qiyue.Research of algorithm for mobile node localization in mine based on kalman filtering[J]. Journal of Electronic Measurement and Instrument, 2013,27(2):120-126.
[10]王妍,邓庆绪,刘赓浩,等.结合运动方程与卡尔曼滤波的动态目标追踪预测算法[J].计算机科学,2015,42(12):76-81.
WANG Yan, DENG Qingxu,LIU Genghao,et al. Dynamic target tracking and predicting algorithm based on combination of motion equation and kalman filter[J]. Computer Science, 2015,42(12):76-81.
[11]蒋鹏,宋华华,王兴民.基于动态生成树和改进不敏卡尔曼滤波的传感器网络目标跟踪算法研究[J].仪器仪表学报,2015,36(2):415-421.
JIANG Peng, SONG Huahua, WANG Xingmin. Target tracking algorithm for sensor networks based on dynamic spanning tree and improved unscented kalman filter[J]. Chinese Journal of Scientific Instrument,2015,36(2):415-421.
[12]Zhen-Tao H U, Jin Z, Zhen G. Unscented kalman probability hypothesis density filter based on interacting multiple model[J]. Control & Decision, 2016.
[13]于洪波,王国宏,孙芸,等.一种融合UKF和EKF的粒子滤波状态估计算法[J].系统工程与电子技术,2013,35(7):1375-1379.
YU Hongbo,WANG Guohong, SUN Yun,et al. Particle filtering algorithm of state estimation on fusion of UKF and EKF[J]. System Engineering and Electronics,2013,35(7):1375-1379.
[14]李菲菲. WSN煤矿瓦斯浓度监测系统时间同步技术研究[D].徐州:中国矿业大学,2015.
[15]李猛. 矿井安全监控系统结构及无线定位技术研究[D].重庆:重庆大学,2012.
