基于变胞原理的坚果剥壳机械手接触建模与构型研究探析
2017-04-14鲍秀兰熊利荣王思宇毛金城
鲍秀兰,熊利荣,王思宇,胡 成,毛金城
(1.华中农业大学工学院,湖北武汉 430070;2.武汉工程大学机电工程学院,湖北武汉 430205)
基于变胞原理的坚果剥壳机械手接触建模与构型研究探析
鲍秀兰1,熊利荣1,王思宇1,胡 成1,毛金城2
(1.华中农业大学工学院,湖北武汉 430070;2.武汉工程大学机电工程学院,湖北武汉 430205)
坚果是中国重要的经济林树种,壳仁分离是坚果精深加工的关键环节,目前普遍存在剥壳率低、损失率高、果仁完整性差等问题。建立准确的果壳与剥壳机械接触模型是破壳力分析的基础。树坚果果壳表面粗糙、外形不规则,接触区域不能抽象为规则的几何形状,如何建立面接触约束模型是实现无损伤壳仁分离的关键问题。以研究坚果壳仁分离机械手的破壳机理、结构设计为目标,提出一种变胞多指机械手,分析了坚果脱壳技术、剥壳机械手接触建模的研究现状,介绍了变胞机构的起源和应用研究概况,并阐述了坚果剥壳机械手的研究内容与发展前景。
农业机械化;多指抓取;变胞机构;剥壳机;坚果
坚果为开花植物或被子植物成熟后的子房,一般分2类:一是种子,如花生、葵花子等,二是树坚果,如核桃、榛子、杏核、板栗等。基于坚果显著的经济效益和社会效益,中国树坚果的种植面积和产量规模不断扩大,树坚果的精深加工前景十分广阔[1]。截至2011年,中国的核桃种植面积达到了2.52×1010m2,总产量达到了128万t,核桃产品出口产值达到了1.4亿美元,产业总产值达到了370多亿元[2]。目前,核桃栽培面积仍然以每年10%的速度递增,到2020 年可望达到2.67×1010m2,届时年产量将达300万t。核桃果实含有丰富的营养成分,具有较好的医疗保健功能,有长寿果之美誉,特别是核桃仁含油率高达60%~70%,在中国食用油料安全方面可发挥重要作用[3]。尽管中国核桃等树坚果资源丰富,但仍处于人工分拣和简单机械加工的粗加工阶段,生产手段落后,效率低下,产品质量不佳,极大影响了其市场竞争力。随着中国树坚果产业的发展,如何针对树坚果进行精深加工,切实提高树坚果的附加价值,增加果农收入,是当前亟待解决的问题。
1 国内外研究现状
1.1 坚果脱壳技术的研究现状
坚果脱壳的方法有许多种,从原理上分有物理脱壳法、化学试剂脱壳法、机械脱壳法等。物理脱壳法是利用果壳内外的压力差来达到坚果去壳的目的,主要有高真空脱壳和高压脱壳2种方法。但由于坚果果壳内外的压力差很难保持,所以要求脱壳过程迅速,而且由于果实各处的强度不同,采用同样的压力差很难瞬间去掉所有果壳。化学试剂脱壳法主要采用适当的化学溶液将外壳软化,然后再利用机械装置进行脱壳。这种方法容易引起溶液残留而导致食品安全问题。目前,坚果脱壳常用的方法还是采用机械装置在果壳上施加外力,使果壳破裂。根据机械装置破壳采用的滚、搓、碾、挤、撞、剪等不同动作,可以将机械脱壳法分为碾搓法、挤压法、撞击法和剪切法等几种类型。
关于坚果壳仁分离设备的研究早在20世纪80年代就已开始。美国坚果加工技术比较成熟,加工装备集机、电、液、气自动控制一体化,规模大,效率高,能耗低,产品质量好。ATIKU等[4]设计了一种碾搓式的坚果脱壳机。OZDEMIR[5]针对利用碾搓法的坚果脱壳机构,研究了不同的碾磨结构对同一种坚果脱壳效果的影响。GARY等[6]发明了一种可调整间隙的挤压式坚果剥壳机。DURSUN[7]研究了在利用挤压法的脱壳机中, 破壳力的施加位置对坚果破壳效果的影响。PEARSON等[8]设计了一种对杏核脱壳情况进行分类的装置, 利用挤压法将坚果经过辊压破壳,在振动工作台和风选箱的筛选后采用激光成像装置筛选去掉破碎的壳体。PRUSSIA等[9]针对壳仁间隙较大的坚果,研究出通过坚果高速运动撞击硬物表面破壳的方法。OLUWOLE等[10]利用撞击法开发了一种离心力剥壳机。JAIN等[11]利用剪切法设计了一种坚果剥壳机。PATEL[12]发明了一种用二氧化碳激光束切割坚果的方法,此方法的破壳率接近百分之百,精确度相当高, 但因其费用昂贵、效率低下等原因, 很难得到推广。LIU等[13]对于澳洲坚果在压缩载荷下的破裂行为进行了研究,BRAGA等[14]研究了澳洲坚果破壳所需的压缩力、变形及所需的能量。
随着中国树坚果生产规模的迅速扩大,配套的坚果壳仁分离设备也得到了深入研究。一些学者已经分别研制了碾搓式银杏脱壳机[15]、挤压碾磨式[16]和撞击式[17]油茶籽脱壳机、辊筒-轧板-筛板式麻风果脱壳机[18]、剪切式核桃破壳取仁机[19],并通过试验达到了较好的脱壳效果。林海等[20]提出了新型坚果脱壳方法,采用气流冲击来完成板栗脱壳工艺。一些学者针对其他农业物料设计了脱壳装置,如双滚筒气力循环式花生脱壳机[21]、橡胶盘式荞麦剥壳机[22]。为了优化设计壳仁分离设备,一些学者在设计机构前进行了脱壳对象的力学分析。为了找到银杏最佳的施力方式,王灵军等[23]在建立银杏有限元模型的基础上进行了破壳力分析。为了研制龙眼鲜果剥壳去核机,卿艳梅等[24]通过试验龙眼蒂部结合力、果肉的挤压特性和果壳的拉伸特性,得到了鲜果的力学特性数据。为研制花生脱壳机,那雪姣等[25]研究了花生仁的损伤特性,高连兴等[26]研究了花生壳脱出物的漂浮系数。为了研制刀豆脱壳,李君等[27]分析了刀豆性状和脱壳损伤机理。这些物料的力学数据和相关分析为脱壳设备的研制和优化提供了理论依据。
1.2 多指机械手接触建模研究现状
树坚果的壳质量所占的比重较大,这严重地阻碍了加工过程中有效组分的提取。壳仁分离是树坚果精深加工的关键环节,其技术的优劣极大地影响了产品的附加价值。目前壳仁分离设备普遍存在剥壳率低、损失率高、果仁完整性差的缺点。这主要是由于树坚果的果壳具有外形不规则、坚硬、难以剥离等特点,部分树坚果(如厚壳核桃)内部横隔壁呈膜质,内褶壁发达,壳仁间隙小,所以在不损伤果仁完整性的情况下进行破壳难度极大。为了提高整仁率,保证产品的加工质量,必须精确施加破壳力,减小破壳失效变形量。建立准确的果壳与剥壳机械接触模型是破壳力分析的基础。由于树坚果果壳表面粗糙、外形不规则,弹性点接触模型不再适用,如何进行接触约束的描述与建模是实现无损伤壳仁分离的关键问题。
多指机械手在坚果破壳时接触力规划实质是研究机械手在接触约束条件下的几何推理、运动规划和动力控制等问题。显然,接触约束的建模和转化是机械手无损伤壳仁分选的关键所在。接触约束建模问题一直以来就是机器人操作、装配规划、数字化样机等研究领域的热点问题[28],相关的研究也很多,大都集中在点接触约束建模与应用方面,而对于复杂的面接触约束模型缺乏深入系统的研究[29]。点接触约束可分为2个方面:刚性点接触约束、柔性点接触约束。刚性点接触模型主要有2种:光滑点接触约束、摩擦点接触约束。光滑点接触约束是最为简化的一种点接触约束模型。但是物体受无摩擦点接触约束的自由度不仅与接触点处的法线矢量有关,而且与物体和手指在接触处的相对曲率有关[30]。摩擦点接触约束在光滑点接触约束模型的基础上增加了摩擦锥约束,BUSS等[31]得出了某对称矩阵的正定性和非线性摩擦锥约束之间的等价关系。HAN等[32]进一步将摩擦锥约束归结为一组线性矩阵不等式LMIs。柔性点接触模型主要有3种:软指接触模型、Gesley’s 模型、赫兹弹性接触模型[33]。软指接触模型在摩擦点接触约束基础上增加了摩擦矩约束[34],而Gesley’s 模型、赫兹弹性接触模型则将接触变形与接触力之间的关系纳入考虑,研究了接触点邻域的性质以及材料的物理特性[35]。其中,Gesley’s 模型采取C空间中的伪距离来度量接触变形程度,采用线弹性模型来简化材料的物理特性[36];而赫兹弹性接触模型则是一种非线性弹性接触模型,模型是在小变形的假设条件下推导得出的,是至今为止应用最广泛的一种接触模型[37]。
1.3 变胞技术研究现状
由于不同种类的树坚果,其外形尺寸、果壳力学特性等物理参数存在显著差异,每种树坚果的最佳破壳力加载位置也各不相同,适宜的施力点数量也会随种类不同而发生变化。因此采用拓扑不变的机械结构无法满足不同种类坚果的剥壳要求。此外,同一品种的树坚果存在尺寸相差较大、含水率不同导致的果壳脆性变化、果壳壁厚不同等个体差异,因此要求壳仁分离设备具有较高的物料形状适应性。至今为止,每种壳仁分离设备都是针对特定种类的坚果而设计的,不同种类的坚果无法共用一种剥壳机械,造成了资源的浪费。当同种类坚果品种、大小等物理参数发生变化时,部分壳仁分离设备必须重新设定参数,甚至无法工作。随着农产品精深加工的不断发展,对设备生产效率、加工质量、食品安全和自动化程度的要求不断提高,减小破仁率和损失率,提高设备通用性和适应性成为壳仁分离设备发展的必然趋势。
变胞机构的研究起源于装饰性纸盒的折纸包装机械拓扑机构变化的需求[38]。变胞机构是一类具有改变构型能力的机构,通过改变机构的拓扑结构来改变机构自由度,以达到不同的功能要求。变胞机构的一个重要特征是构态变化。变胞机构的概念提出后,以其结构新颖和特殊用途陆续引起了广泛的学术兴趣[39]。变胞方式分为几何约束变胞、构件变胞以及运动副变胞3类[40],其中实现运动副变胞的一个有效方法是采用变胞运动副[41]。对于变胞机构的拓扑结构,LI等[42]采用矩阵进行描述。通过矩阵中包含的运动副类型及轴线等信息,详细地反映出变胞机构的拓扑结构。采用矩阵描述拓扑结构的方式,还可以通过矩阵运算来描述变胞机构的构态转换[43]。在设计变胞机构时可以采用变自由度运动副以取代传统运动副,这是因为当变自由度运动副的自由度发生改变时,机构构态也会随之变化[44]。通过这种变自由度运动副的方法可以设计出新的变胞机构[45],以得到不同的构态来适应不同功能需求。由于变胞铰链在不同的工作构态时具有不同的几何特性,衍生出了一系列新型的变胞机构,在不同约束条件下这些变胞机构具有不同的自由度特性[46]。根据改变运动副方位特征来实现构态变换的变胞原理,吴腾等[47]设计了一种并联变胞机构,分析了各构态机构的自由度,研究了构态转换位置对并联机构工作性能的影响。基于变胞机构的等效阻力梯度模型[48],杨强等[49]给出一种能求出变胞运动副约束和结构形式的构型综合方法,综合运用基于螺旋理论的约束综合法获得了一批新型空间多自由度可控机构式装载机的构型[50]。
王汝贵等[51]演化设计出具有可重构功能的平面-空间多面体变胞机构。CARROLL等[52]进一步提出了柔性变胞机构。在变胞过程中利用杆件柔性完成变胞过程。LIU等[53]在深入研究了变胞机构后,提出了变胞的3种方式。这3种方式是利用杆件的偶合、杆件连接关系的变化,以及运动副的特性变化,以达到变胞。郑金勇[54]将两组开式机构组合成球面五杆变胞机械手掌,并建立了手掌尺寸综合模型。CUI等[55]研究了变胞机构机械手掌的设计,并初步分析了机构的工作空间和抓取姿态。由于手指接触应力动态分布的复杂性,目前变胞多指机械手的研究只局限于动作顺序规划,未能进行精确力控制的研究。相比手掌采用变胞机构,手指变胞机构更能极大增强机器手的灵巧度,但会增大工作空间分析的复杂度,因此尚未对手指变胞机构开展相关研究。针对壳仁分离的具体要求,在进行破壳和取仁的连续运动中,如何设计相应手指变胞结构,利用机械手工作空间的运动特性和力学特性来实现良好的坚果破壳功能,仍是一件极富挑战性的科研任务。
2 当前研究存在的问题
综合分析以上国内外的研究进展可知,国内外多数研究人员研究开发的主要还是机械式的坚果脱壳机,脱壳机构日益完善,脱壳率渐渐提高。但在降低坚果破仁率方面仍有待完善,且每种脱壳机只能应用于一种坚果,离通用化的生产应用还有一段距离,特别是缺少对树坚果基本物理机械特性和破壳设备结构性能原理的研究。
尽管多指机械手接触建模的研究成果较为丰富,但是在坚果剥壳问题中,机械手接触区域的变形分布形式需要进行优化控制,接触区域不能抽象为规则的几何形状,需要合适的模型对接触区域的几何形貌进行描述。面对坚果壳仁分选机械手无损伤取果仁的要求,已有的点接触约束模型的假设前提条件不成立,需要寻求一种更精确的面接触约束模型进行描述分析。
为了突破当前坚果剥壳机械设计的局限性,需解决如下科学问题:1)接触界面几何模型中的表面误差的处理。由于果壳表面粗糙的原因,接触界面是不规则的平面或曲面,并且存在随机误差。界面的不规则以及随机误差将影响接触界面的应力分布状态和界面局部变形的分布,因此,存在随机误差的不规则接触界面建模是亟需解决的问题。2)接触界面变形的度量。由于接触界面的不规则,接触界面上各点的受力状态和变形程度不一致,建立局部变形之间的协调关系,给出接触界面变形的一致度量,是求解接触物体最终位置和接触力规划的关键。3)手指变胞结构的约束构型综合。在坚果剥壳机械手的变胞机构设计中,除了要设计出手指机构结构拓扑,还要提出能够实现构型转换、构型保持和运动时序要求的约束方式,设计对应的结构形式以及配置机构结构参数。进一步探索变胞运动副的运动状态与其约束形式、约束力性态及运动副结构间的联系是问题的关键。
3 坚果剥壳机械手的研究内容
针对具有高品质、高适应性的壳仁分离通用变胞机械手,围绕多种树坚果壳仁完整分离中的关键问题,采用理论分析、数字仿真及实验验证相结合的方法,对多种树坚果的果壳物理特性和力学特性进行建模和分析,开展对破壳载荷分析、变胞机械的结构设计、接触力规划等方面的研究,并对坚果破壳性能进行原理性测试实验。依据研究内容的相互关系,制定总体技术路线如图1 所示。

图1 总体技术路线Fig.1 Overall technical route
1)不同种类树坚果的机械物理参数测试和壳体建模以核桃、榛子、杏核3类坚果作为研究对象,对于每类坚果挑选不同等级的个体1 000颗,分为5组,对坚果的质量分布、含水率、三维尺寸、壳厚度、壳仁间隙等参数进行测量研究,建立基本的研究数据。由于坚果本身形状不规则,表面凹凸不平,虽为两半球体却非规则的对称体,为得到真实完整的轮廓数据,采用基于结构光图像法的三维曲面重构技术来获取坚果壳体模型。首先对于每类坚果,在5组中每组选出三维尺寸位于平均值附近的坚果一颗,选用拍照式三维扫描仪对此颗坚果壳体进行多角度测量,在获取表面三维数据的同时,还能够迅速的获取壳体表面的纹理信息。利用测量获取的坚果壳体外形轮廓点云数据,构造三角形切片,利用众多空间三角片的组合来重现模型轮廓曲面,利用测得的细胞大小填充于坚果内外壳之间,形成真实的坚果壳体的计算机仿真三维模型,如图2 所示。
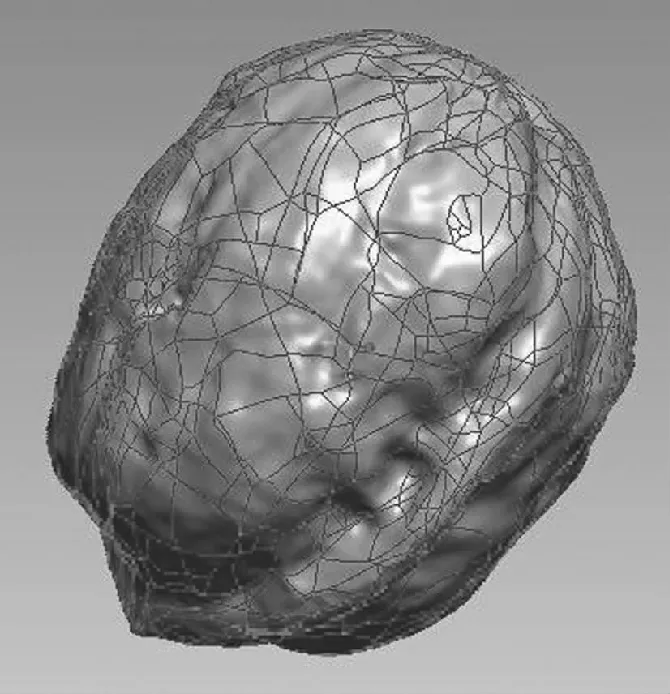
图2 核桃三维重构曲面Fig.2 Three dimensional reconstruction surface of walnut
2)机械手手指局部接触力的建模与分析
采用机器人抓取建模与分析理论,建立多指机械手-坚果系统的力学平衡与位移变化分析模型,分析接触约束的子空间特征。基于Hertz接触模型和有限元仿真方法,建立局部弹塑性接触模型,描述局部变形与接触力之间的非线性关系。建立分布力的等效集中模型,描述接触区域等效扭矩与接触区域大小以及接触材料之间的关系。根据势能极小化原理计算求解接触力。
当接触位置是一条线或者一个面时,接触力为非均匀分布,并且在物体发生接触过程中,接触力的分布方式也是变化的,因此接触的等效位置是不确定的,接触位置的不确定性使得抓取矩阵无法确定。首先建立在施加破壳力的条件下果壳与机械手手指接触界面的应力分布之间的映射关系,采取Monte Carlo方法描述接触界面的果壳随机表面误差,考虑随机表面误差对界面的几何特征建模,得到接触约束模型的其中一个子模型——接触界面几何模型。其次建立接触界面应力分布与接触界面果壳局部变形之间的映射关系。最后建立局部变形与整体位姿之间的映射关系,得到果壳-手指接触界面的几何特征描述模型。
根据能量原理,研究接触界面局部变形的协调关系,提出不规则接触界面的局部变形分布模型。在该模型的基础上,采用12维空间中的6维子流形来统一表达物体的位置和姿态的C空间理论,提出接触界面变形的一致度量方法。
建立单个手指-坚果的有限元模型,定义接触过程中的加载及约束条件,对坚果破壳工况下的弹塑性变形进行模拟,通过积分得到接触中心的等效切向位移与接触力,建立摩擦系数与法向载荷的拟合关系式。建立分布力的等效集中模型,研究接触区域等效扭矩与接触区域大小以及接触材料之间的关系。
3)机械手整体抓取模型分析和原理实验验证
根据实验数据建立内表面的棱板结构模型与果仁模型,采取实验方法测定果仁的材料特性参数,建立每类不同等级坚果模型和机械手模型的有限单元网格,定义摩擦面接触单元模拟果壳与机械手、果仁之间的约束关系。在研究计划中,拟对机械手对拓夹持、三点夹持和四点夹持等不同加载模式进行模拟,同时调整机械手的加载位置进行多组数据的计算和优化分析,分析加载模式与各类坚果失效变形量、果仁破损率之间的关系。
针对对拓夹持加载方式,对不同组坚果分别选择长轴、短轴、棱线等位置进行加载实验,采用高速CCD相机记录核桃在对拓夹持加载过程中变形位移、裂纹产生与扩展形式,分析破损程度与加载载荷之间的关系。通过实验数据和仿真结果的对比,分析比较坚果三维几何模型的精度,修正坚果加载破壳的有限元网格模型与边界条件。
4)变胞机构设计
将基于机器人运动学、微分运动学与约束动力学的旋量数学模型,分别建立三点抓取、四点抓取、五点抓取等条件下的机械手-坚果系统的旋量代数方程,提出其接触力和微分运动的一般解及其子空间分析方法,分析机械手抓取点位置变化与坚果微分运动形式以及接触力分布特性变化之间的关系。基于变形体运动学研究操作空间运动,构造弹性动力学模型,确定坚果的动力学行为与机械手姿态的依赖关系。针对核桃、榛子和杏核等三类坚果研究机械手动力学性能优化方法,以失效变形为优化目标,建立增广的拉格朗日乘子优化模型,开发有效的约束优化求解算法,提出机械手指抓取位置的优化方法。
分析变胞机械手在抓取点采用李群和李代数方法建立坚果三点抓取过渡到四点抓取时的拓扑结构构态形式化描述,求解坚果与机械手之间的相对运动关系。描述机械手-坚果系统在变形和微分运动过程中的拓扑结构变化,建立机械手-坚果系统变拓扑结构的一致化描述,为坚果壳仁分离过程中产生的接触和脱离等问题描述提供理论建模方法。结合机械手-坚果系统的运动学、动力学、接触力学等方面的综合研究,系统分析坚果和机械手从接触开始到破碎脱离的全过程,为坚果壳仁分离机械手设计提供理论指导。
4 结 语
随着农产品精深加工的不断发展,具有高效高品质通用性强的树坚果壳仁分选设备势必成为极大提高农产品附加价值的必需工具,但由此带来的接触力建模与破壳力分析问题逐渐成为精深加工领域需要迫切解决的技术难题。解决上述问题对掌握农业机械化生产技术中坚果壳仁分选设备的结构性能原理、提升坚果类精深加工产品质量具有重要的理论意义和实用价值。变胞多指坚果剥壳机械手的研发将为农产品精深加工自动化提供技术支撑,有助于提高树坚果类农产品的附加价值,促进坚果产业的快速、稳步发展,具有广阔的应用前景。
/References:
[1] 康明丽,牟德华. 板栗加工褐变机理及控制方法研究进展[J]. 河北科技大学学报, 2003,24(4): 72-76. KANG Mingli, MOU Dehua. Study on browning chinese chestnut during the processing and its inhibition[J]. Journal of Hebei University of Science and Technology, 2003,24(4): 72-76.
[2] 张永利. 在首届中国核桃节开幕式上的讲话[J]. 河北林业, 2011(5): 6-8.
[3] 张有林,原双进,王小纪,等. 基于中国核桃发展战略的核桃加工业的分析与思考[J]. 农业工程学报, 2015,31(21):1-8. ZHANG Youlin, YUAN Shuangjin, WANG Xiaoji, et al. Analysis and reflection on development strategy of walnut processing industry in China [J]. Transactions of the Chinese Society of Agricultural Engineering, 2015,31(21):1-8.
[4] ATIKU A, AVIARA N,HAQUE M. Performance evaluation of a bambara groundnut sheller[J].Agricultural Engineering International: the CIGR Journal of Scientific Research and Development, 2004, 6: 1-18.
[5] OZDEMIR M. Comparison of the quality of hazelnuts shelled with modified conical sheller and stone sheller [J]. Journal of Agricultural Engineering Research, 1999, 72(3): 211-216.
[6] GARY E, RUSSELL W. Nut Shell Removal System and Method [P]. US: 20130298785 A1, 2013-05-10.
[7] DURSUN I G. Determination of the shelling resistance some products under the point load [J].17thNational Symposium on Mechanization in Agriculture Proceedings, 1997,66: 950-957.
[8] PEARSON T, YOUNG R. Automated sorting of almonds with embedded shell by laser transmittance imagining [J]. Applied Engineering in Agriculture, 2002, 18(5): 637-642.
[9] PRUSSIA S E, VERMA B P.Apparatus for cracking edible nuts[P].US:4467710A,1984-08-01.
[10] OLUWOLE F A, ABDULRAHIM A T. Evaluation of some centrifugal impaction devices for shelling bambara groundnut [J]. Agricultural Engineering International: the CIGR Journal of Scientific Research and Development, 2007, 9: 1-14.
[11]JAIN R K, KUMAR S. Development of a cashew nut sheller[J]. Journal of Food Engineering, 1997, 32(3): 339-345.
[12]PATEL C. Method for Shelling of Nuts with a Laser Beam [P]. US: 435867A, 1982-10-10.
[13]LIU R, WANG C H, BATHGATE R G. Fracture analysis of cracked macadamia nutshells under contact load between two rigid plates [J]. Journal of Agricultural Engineering Research, 1999, 74(3): 243-250.
[14]BRAGA G C, COUTO S M, NETO J T. Mechanical behavior of macadamia nut under compression loading [J]. Journal of Agricultural Engineering Research, 1999, 72(3): 239-245.
[15]朱立学,罗锡文,刘少达. 轧辊-轧板式银杏脱壳机的优化设计与试验[J]. 农业工程学报, 2008, 24(8): 139-142. ZHU Lixue, LUO Xiwen, LIU Shaoda. Optimized design and experiment of roller-crush board ginkgo huller [J]. Transactions of the Chinese Society of Agricultural Engineering, 2008, 24(8): 139-142.
[16]黄凤洪,李文林,夏伏建,等. 油茶籽脱壳机的研制与应用[J]. 农业工程学报, 2006, 22(11): 147-151. HUANG Fenghong, LI Wenlin, XIA Fujian,et al. Research and application of dehulling machine for camellia oleosa seed [J]. Transactions of the Chinese Society of Agricultural Engineering, 2006, 22(11): 147-151.
[17]郭贵生,吕新民,党革荣. 油菜籽两次撞击脱壳性能试验[J]. 西北农林科技大学学报(自然科学版), 2005, 33(10): 100-104. GUO Guisheng, LYU Xinmin, DANG Gerong. Study on a rapeseed huller based on two-time striking [J]. Journal of Northwest Sci-Tech University of Agriculture and Forestry(Natural Science Edition) , 2005, 33(10): 100-104.
[18]张黎骅,张文,苟文. 麻风果脱壳机的设计与试验研究[J]. 西南大学学报(自然科学版), 2010, 32(9): 147-152. ZHANG Lihua, ZHANG Wen, GOU Wen. Design and experiment of a Jatropha-nut huller [J]. Journal of Southwest University(Natural Science), 2010, 32(9): 147-152.
[19]刘明政. 核桃剪切挤压柔性破壳取仁的机理分析与实验研究[D]. 青岛: 青岛理工大学, 2015. LIU Mingzheng. Mechanization Analysis and Experimentation Research of Walnut Shearing-Extrusion Flexible Shell-Crushing[D]. Qingdao: Qingdao Technological University,2015.
[20]林海,高振江. 响应曲面法优化气体射流冲击锥栗脱壳工艺[J]. 农业机械学报, 2006, 37(4): 71-75. LIN Hai, GAO Zhenjiang. Optimization of air-impingement shelling for castanea henryi using response surface methodology [J]. Transactions of the Chinese Society for Agricultural Machinery, 2006, 37(4): 71-75.
[21]高连兴,杜鑫,张文. 双滚筒气力循环式花生脱壳机设计[J]. 农业机械学报, 2011, 42(10): 68-73. GAO Lianxing, DU Xin, ZHANG Wen. Double-roller peanut sheller with pneumatic circulating [J]. Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(10): 68-73.
[22]吴英思,杜文亮,刘飞. 荞麦剥壳机分离装置的改进试验[J]. 农业工程学报, 2010, 26(5): 127-131. WU Yingsi, DU Wenliang, LIU Fei. Improvement experiments on the separating device of buckwheat shucker [J]. Transactions of the Chinese Society of Agricultural Engineering, 2010, 26(5): 127-131.
[23]王灵军,全燕鸣,邓文君. 银杏脱壳的有限元受力分析[J]. 农业工程学报, 2003, 19(4): 58-61. WANG Lingjun, QUAN Yanming, DENG Wenjun. Analysis of finite element method for threshing gingko fruit shell [J]. Transactions of the Chinese Society of Agricultural Engineering, 2003, 19(4): 58-61.
[24]卿艳梅,曹玉华,李长友,等. 龙眼鲜果剥壳力学特性[J]. 农业工程学报, 2010, 26(5): 122-126. QING Yanmei, CAO Yuhua, LI Changyou, et al. Mechanical properties of fresh longan hulling [J]. Transactions of the Chinese Society of Agricultural Engineering, 2010, 26(5): 122-126.
[25]那雪姣,刘明国,张文. 机械脱壳时花生仁损伤特征及规律[J]. 农业工程学报, 2010, 26(5): 117-121. NA Xuejiao, LIU Mingguo, ZHANG Wen. Damage characteristics and regularity of peanut kernels under mechanical shelling [J]. Transactions of the Chinese Society of Agricultural Engineering, 2010, 26(5): 117-121.
[26]高连兴,张文,杜鑫. 花生脱壳机脱出物的漂浮系数试验[J]. 农业工程学报, 2012, 28(2): 289-292. GAO Lianxing, ZHANG Wen, DU Xin. Experiment on aerodynamic characteristics of threshed mixtures of peanut shelling machine [J]. Transactions of the Chinese Society of Agricultural Engineering, 2012, 28(2): 289-292.
[27]李君,陆华忠,杨洲,等. 刀豆脱壳机构的设计与试验[J]. 农业工程学报, 2013, 29(1): 26-32. LI Jun, LU Huazhong, YANG Zhou, et al. Design and experiment of Canavalia shelling mechanism [J]. Transactions of the Chinese Society of Agricultural Engineering, 2013, 29(1): 26-32.
[28]佟瑞庭. 纳观纹理表面往复滑动接触磨损问题研究进展[J]. 河北科技大学学报, 2013,34(3): 189-199. TONG Ruiting. Advances on nanoscale wear mechanism in reciprocating sliding contacts of textured surfaces [J]. Journal of Hebei University of Science and Technology, 2013,34(3): 189-199.
[29]熊有伦, 尹周平, 熊蔡华, 等. 机器人操作[M]. 武汉:湖北科学技术出版社, 2002.
[30]RIMON E, BURDICK J W. Mobility of bodies in contact(part Ⅱ): How forces are generated by curvature effects[J]. IEEE Transaction on Robotics and Automation, 1998,14(5): 709-717.
[31]BUSS M, HASHIMOTO H, MOORE J B. Dexterous hand grasping force optimization[J]. IEEE Transaction on Robotics and Automation, 1996,12(3):406-418.
[32]HAN L, TRINKLE J C, LI Z X. Grasp analysis as linear matrix inequality problem[J]. IEEE Transaction on Robotics and Automation, 2000,16(6):663-674.
[33]CARLOS R, LLUS R, JOSEP M P, et al. Synthesizing grasp configurations with specified contact regions[J]. The International Journal of Robotics Research, 2010(3):1-13.
[34]XIONG C H, DING H, XIONG Y L. On clamping planning in workpiece-fixture systems[J]. IEEE Transaction on Automation Science and Engineering, 2008,5(3): 407-419.
[35]VOSE T, UMBANHOWAR P, LYNCH K M. Vibration-induced frictional force fields on a rigid plate[C]// Proceedings-IEEE International Conference on Robotics and Automation. Roma: IEEE, 2007:660-667.
[36]ANDERS P, THOMAS O, DARWIN G C, et al. A bernoulli principle gripper for handling of planar and 3D (food) products[J]. An International Journal on Industrial Robot, 2010,37(6):518-526.
[37]SICILIANO B, KHATIB O. Springer Handbook of Robotics[M]. New York: Springer, 2007.
[38]王德伦,戴建生.变胞机构及其综合的理论基础[J]. 机械工程学报, 2007, 43(8): 32-42. WANG Delun, DAI Jiansheng. Theoretical foundation of metamorphic mechanism and its synthesis [J]. Chinese Journal of Mechanical Engineering, 2007, 43(8): 32-42.
[39]张武翔,丁希仑,戴建生. 基于约束变化特征分析的变胞机构构型综合方法[J]. 机械工程学报, 2013, 49(5): 1-9. ZHANG Wuxiang, DING Xilun, DAI Jiansheng. Method for configuration synthesis of metamorphic mechanisms based on constraint variation [J]. Chinese Journal of Mechanical Engineering, 2013, 49(5): 1-9.
[40]ZHANG L P, DAI J S. Metamorphic techniques and geometric reconfiguration principles [C]//ASME/IFToMM International Conference on Reconfigurable Mechanisms and Robots. London: [s.n.], 2009: 32-40.
[41]畅博彦,金国光,戴建生. 基于变约束旋量原理的变胞机构构型综合[J]. 机械工程学报, 2014, 50(5): 17-25. CHANG Boyan, JIN Guoguang, DAI Jiansheng. Type synthesis of metamorphic mechanism based on variable constraint screw theory [J]. Chinese Journal of Mechanical Engineering, 2014, 50(5): 17-25.
[42]LI S J, ZHANG Y L, YANG S, et al. Joint-gene based variable topological representations and configuration transformations [C]//ASME/IFToMM International Conference on Reconfigurable Mechanisms and Robots. London: [s.n.], 2009: 348-354.
[43]DAI J S , JONES J R. Matrix representation of topological changes in metamorphic mechanisms [J]. ASME Trans J Mech Des,2005,127(4):837-840.
[44]LI S J, WANG H G, DAI J S, et al. Topological representation and operation of motion space exchange reconfiguration of metamorphic mechanisms [C]//Computational Kinematics.[S.l.]:Springer,2014:31-39.
[45]ZHANG K T, DAI J S, FANG Y F, et al. A new metamorphic mechanism with ability for platform orientation switch and mobility change [C]//Asme/Iftomm International Conference on Reconfigurable Mechanisms and Robots. London: [s.n.], 2009: 596-602.
[46]GAN D M, DAI J S, LIAO Q Z. Mobility change in two types of metamorphic parallel mechanisms [J]. Journal of Mechanisms and Robotics, 2009,1(4):041007.
[47]吴腾,张武翔,丁希仑. 一种新型并联变胞机构的设计与分析[J]. 机械工程学报, 2015, 51(7): 30-37. WU Teng, ZHANG Wuxiang, DING Xilun. Design and analysis of a novel parallel metamorphic mechanism [J]. Chinese Journal of Mechanical Engineering, 2015, 51(7): 30-37.
[48]李树军,王洪光,戴建生. 变胞机构的等效阻力梯度模型及其设计方法[J]. 机械工程学报, 2014, 50(1): 18-23. LI Shujun, WANG Hongguang, DAI Jiansheng. The equivalent resistance gradient model of metamorphic mechanisms and the design method [J]. Chinese Journal of Mechanical Engineering, 2014, 50(1): 18-23.
[49]杨强,王洪光,李树军,等. 含变胞运动副结构的约束变胞机构构型综合[J]. 机械工程学报, 2014, 50(13): 1-8. YANG Qiang, WANG Hongguang, LI Shujun, et al. Type synthesis of constrained metamorphic mechanisms with structural forms of metamorphic joints [J]. Chinese Journal of Mechanical Engineering, 2014, 50(13): 1-8.
[50]蔡敢为,潘宇晨,王红州,等. 基于功能分析的新型装载机构型综合研究[J]. 机械工程学报, 2014, 50(11): 50-59. CAI Ganwei, PAN Yuchen, WANG Hongzhou, et al. Functional analysis based type synthesis of a novel type of loading mechanisms [J]. Chinese Journal of Mechanical Engineering, 2014, 50(11): 50-59.
[51]王汝贵,戴建生. 一种新型平面-空间多面体可重构变胞机构的设计与分析[J]. 机械工程学报, 2013, 49(11): 29-35. WANG Rugui, DAI Jiansheng. Design and analyses of a novel plane-space polyhedral reconfigurable metamorphic mechanism [J]. Chinese Journal of Mechanical Engineering, 2013, 49(11): 29-35.
[52]CARROLL D W, MAGLEBY S P,HOWELL L H. Simplified manufacturing through a metamorhic process. for compliant orthoplanar mechanisms [C]// ASME Design Engineering Technical Conference.New York:ASME, 2003:389-399.
[53]LIU C H, YANG T L. Essence and characteristics of metamorphic mechanisms and their metamorphic ways [C] // Proc 11th World Congress in Mechanism and Machine Science. Tianjin: Mech Eng Press, 2004:1285-1288.
[54]郑金勇. 球面五杆变胞机械手运动分析与手掌综合[D]. 大连: 大连理工大学, 2006. ZHENG Jinyong. Geometric Analysis and Palm Synthesis of the Spherical Five-Bar Metamorphic Robotic Hand [D]. Dalian: Dalian University of Technology,2006.
[55]CUI L, DAI J S. Posture, workspace and manipulability of the metamorphic multifingered hand with an articulated palm [J]. Journal of Mechanisms and Robotics, 2011, 3(2): 295-302.
Research advances in contact model and mechanism configuration for nut shelling manipulation based on metamorphic method
BAO Xiulan1, XIONG Lirong1, WANG Siyu1, HU Cheng1, MAO Jincheng2
(1. College of Engineering, Huazhong Agricultural University, Wuhan, Hubei 430070, China; 2. School of Mechanical and Electrical Engineering, Wuhan Institute of Technology, Wuhan, Hubei 430205, China)
Nuts are the important economic forest tree species of China. De-shell is the key operation of nut deep processing. There are some problems in the current nut cracking devices such as the low decorticating rate, the high nuts losses rate and nutmeat integrity problems, etc.. The foundation of force analysis is to establish contact model for nut and mechanical. The nut surface is rough and irregular, so the contact area cannot be modeled as regular shape. How to set up contact constraint model is the key problem to accomplish non-loss shelling. In order to study the shell-breaking mechanism and structural design of the nut shelling manipulation, a multi-fingered metamorphic manipulator is presented. An overview of the nut shelling technology and the contact manipulator modeling are proposed. The origin and application of metamorphic mechanisms are introduced. Then the research contents and development prospects of nut shelling manipulator are described.
agricultural mechanization; multi-fingered grasp; metamorphic mechanism; sheller; nut
1008-1542(2017)02-0108-08
10.7535/hbkd.2017yx02004
2016-11-21;
2017-01-13;责任编辑:冯 民
国家自然科学基金(51605181);中央高校基本科研业务费专项基金(2662016PY017)
鲍秀兰(1984-),女,江西婺源人,博士,主要从事农产品加工装备自动化方面的研究。
毛金城讲师。E-mail:mjincheng1999@163.com
S238
A
鲍秀兰,熊利荣,王思宇,等. 基于变胞原理的坚果剥壳机械手接触建模与构型研究探析[J].河北科技大学学报,2017,38(2):108-115.
BAO Xiulan,XIONG Lirong,WANG Siyu,et al. Research advances in contact model and mechanism configuration for nut shelling manipulation based on metamorphic method[J].Journal of Hebei University of Science and Technology,2017,38(2):108-115.
