低重频短驻留搜索雷达的悬停直升机检测
2017-04-13王育东
王育东
(西安电子工程研究所,陕西 西安 710100)
低重频短驻留搜索雷达的悬停直升机检测
王育东
(西安电子工程研究所,陕西 西安 710100)
直升机在军事上的广泛应用对现有陆基中低空防空系统提出了挑战。低空、慢速、悬停式武装直升机的雷达探测是一个迫切需要解决的课题。分析了低重频搜索雷达利用旋翼回波信号来探测悬停直升机所存在的问题,并用实测数据进行验证。基于这些问题提出了一种对驻留时间要求较小的检测方法,并用实测数据验证了算法的有效性。
悬停直升机;旋翼回波;搜索雷达检测;低脉冲重复频率
0 引言
在现代战争中,武装直升机能够凭借其低空、慢速、悬停的优势发动突然攻击,以地杂波作为掩护。一般的陆基雷达会受到强杂波干扰和视距限制难于对其探测。在复杂地域环境下,武装直升机通常还会利用地形规划攻击任务,在接近或达到攻击距离时垂直跃升到无遮蔽高度,对目标实施攻击。在反坦克和反装甲车辆、战场侦查等多项任务中有其独特的优势,是现代陆基中低空防空系统的威胁。
直升机具有长而大的旋翼,一般由3~6片组成,且转速较高(3~6r/s),通常在水平面内旋转。旋翼产生的雷达回波具有较强的多普勒调制,在时域上呈现为准周期性的峰包,在频域上具有宽的多普勒频谱。20世纪90年代初,MARTIN等[1]提出了单基地雷达体制直升机旋翼回波模型。该回波模型是一种线性的理想旋翼回波后向散射模型,其特点是:将单个叶片等效为一均匀、线性、刚性的长杆;每个叶片对雷达视线总是可见(叶片无遮挡)。丁建江等[2]验证了理想回波模型和实际回波模型的区别。陈永彬[3]、叶玲平等[4]分别采用短时傅里叶变换和Radon-Wigner变换从联合时频域分析了旋翼的微多普勒特性。这些都是以理论仿真为主,并没有用实测数据验证,并且没有考虑在常规的机械扫描搜索雷达体制下直升机的回波特性。对于机械扫描雷达,以单个主旋翼脉冲能量进行检测[5],很可能难以满足搜索雷达系统对直升机探测距离的要求。这是因为:一方面,搜索雷达为了兼顾其它目标探测,必须保持较高的系统数据率,其波束驻留时间不可能很长,雷达在一次扫描期间可能获得的直升机主旋翼回波脉冲很少,几乎采不到桨叶的峰值信号;另一方面,根据理论分析和实际测试,直升机主旋翼的RCS较其机身要小10dB以上[6]。鉴于上述情况,本文主要考虑低重频搜索雷达利用旋翼回波信号来探测悬停直升机所存在的问题。分析直升机旋翼回波信号的时域模型,频域特性,给出一种对驻留时间要求较小的悬停直升机的初步检测方案,并用实测数据进行验证。
1 直升机雷达回波建模与特性分析
1.1 直升机旋翼回波数学模型

图1 直升机主旋翼与雷达位置关系
悬停直升机旋翼回波可以用以下模型表示:
(1)
其中:
(2)
λ为雷达工作波长,L是主旋翼的长度和叶毂长度总和,N为叶片数目,初始相位为φ0,雷达和直升机相距R0,fr为旋翼转速。式(1)描述了旋翼回波调制特性的时域散射点积分模型,可知直升机主旋翼回波的幅度和相位都受到主旋翼旋转因子fr的调制。
1.2 旋翼回波特征分析
1.2.1 时域回波闪烁频率
回波时域闪烁频率Fp定义为雷达波束连续照射直升机目标时单位时间内产生的sinc函数调制主瓣的数目。如果叶片数N为奇数,则旋翼每旋转一圈,每一个叶片与雷达波束垂直会发生两次,所以每圈一共2N次闪烁。如果叶片数N为偶数,则当一个叶片与雷达波束垂直时,与该叶片关于叶毂对称的叶片也与雷达波束垂直,即比奇数叶片数的情况少一倍的闪烁次数,即旋翼每旋转一圈会产生N次闪烁。从式(1)和式(2)可以推得出:
(3)
其中,当N为偶数时,k=1;当N为奇数时,k=2。
1.2.2 时域闪烁时间宽度
由式(1)可知,旋翼回波在时域上表现为sinc函数形状的脉冲串,能量主要集中在sinc函数的主瓣内,把sinc函数主瓣宽度所表示的时间称作闪烁时间宽度ΔT。实际中雷达对旋翼回波时间上的采样不可能无限高,为了保证采样采到足够多的回波能量,最好能够采到sinc函数主瓣内的信号。直升机旋翼回波的主瓣宽度和主瓣的3dB宽度为[7]:
(4)
(5)
1.2.3 频谱宽度
旋翼叶尖是整个旋翼上速度最快的地方,其产生的多普勒频率表示频谱上的最大值,即:
(6)
则整个频谱宽度为:
(7)
2 近程机扫搜索雷达回波特性分析
2.1 驻留时间分析

2.2 频谱展宽的必然性
对于搜索雷达而言,尽管在一个CPI内很难采集到脉冲峰值,但从采集到的回波中可以很明显的看出旋翼回波的频谱展宽特性,如图2所示。
图2中五个曲线的交点是某一时刻所能获得的多普勒最小值,因此不管搜索雷达能够采集到多少个脉冲,也不管是否包含闪烁峰值,这些数据在距离多普勒二维平面中一定有频谱展宽现象,只是展宽的频谱强度有所区别。当某一CPI内包含闪烁峰值时,此时多普勒值达到最宽,并且频谱幅度是最大的。
2.3 实测数据分析
用某波段跟踪雷达对米-171直升机悬停状态下进行照射,采集回波信号。雷达系统参数为:正斜率LFM,脉宽为8us,带宽14MHz,重频间隔100us,波长0.1m,直升机高度200m,雷达相距直升机径向距离2km,CPI为2 048。

图2 五叶片旋翼各自的瞬时多普勒变化曲线
表1 米-171直升机结构参数

主旋翼数目主旋翼旋转速率(r/s)主旋翼直径(m)理论闪烁周期(ms)53.321.2930.3理论多普勒宽度(Hz)尾翼数目尾翼直径(m)实用升限(m)882433.95000

图3 米171时域回波数据
图4(a)给出的是CPI=128点的积累结果,由于这128个脉冲中不包含时域闪烁峰值,所以展宽频谱的幅度较小,但要比周围杂波的谱幅度要大4dB。图4(b)给出了距离多普勒的三维显示,所以设定合适的门限是可以检测到的。

图4 米171频谱分析CPI=128
3 悬停直升机检测方案
由上文分析可知,搜索雷达由于波束驻留时间的限制,在一个CPI内很难采集到桨叶的峰值信号,所以基于时域的方法很难奏效。由于频谱展宽的必然性,尽管有范围较宽的谱线,能量发生扩散,但在频域还是可以积累的。为了消除较强的地物杂波,保证检测的准确性,需要对回波进行MTI处理,以提高检测时的信杂比和信噪比,尽管MTI会处理掉机身分量,损失部分能量,但这对后续的门限检测是有利的。在做MTI时,不能加窗处理,因为加窗会导致主瓣展宽,副瓣降低,使得旋翼的多普勒信号变得更弱,不利于检测。图5给出了检测悬停直升机的流程图。其中雷达的系统参数同2.3节。
图6为MTI后的多普勒处理结果,可以看出展宽的部分比周围杂波谱高出5dB左右; 设置合适的门限得到图7。可以取出很多点过门限点,并且这些点几乎位于同一条直线上,然后非相参积累并在距离维上做CFAR处理得到图8。根据求重心法可以估算出悬停直升机所在的位置。
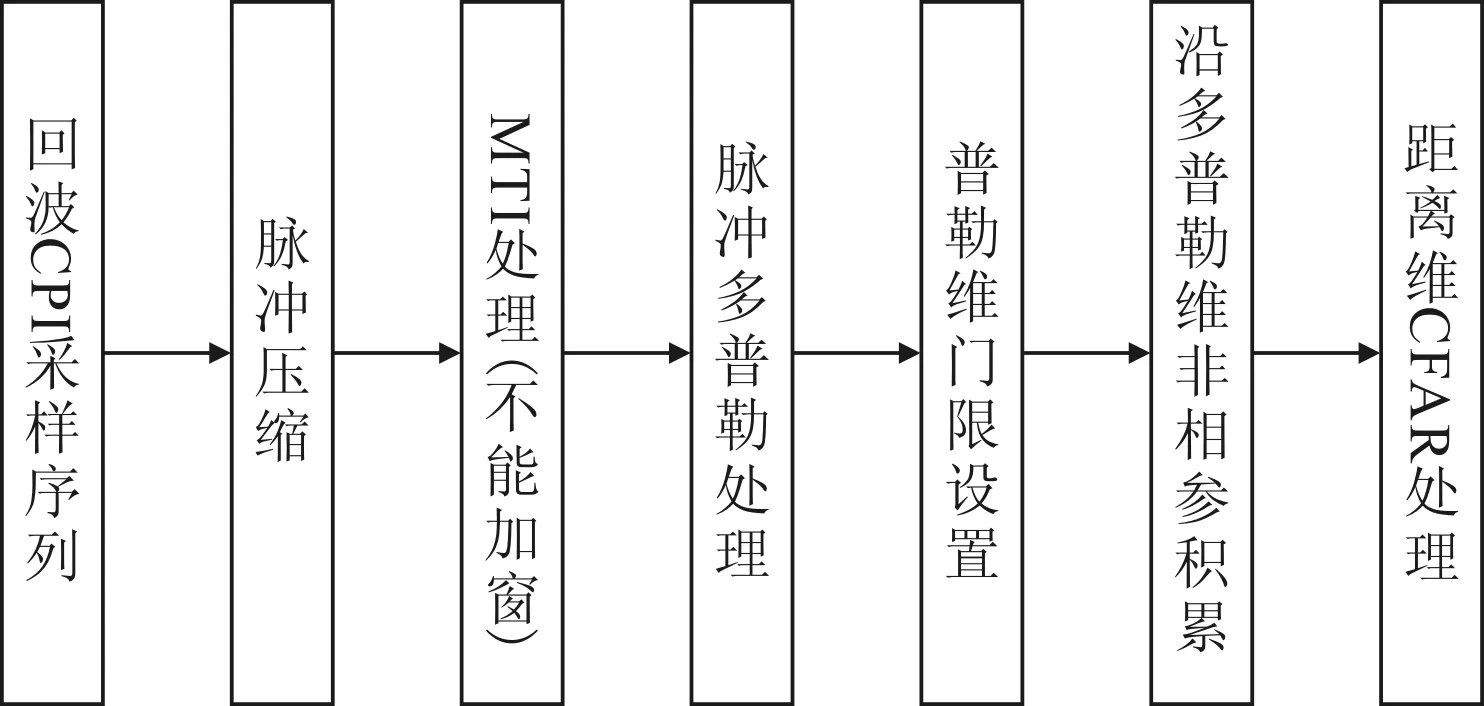
图5 探测悬停直升机的信号处理流程

图6 MTI后的多普勒处理结果

图7 多普勒维门限处理结果

图8 多普勒维非相参积累后CFAR处理结果
4 结语
本文给出的算法处理流程具有以下优点:①性能优良,稳定性好;②算法简单,计算量小;③不需要改变雷达原来的系统参数和工作方式,系统兼容性好,在一定程度上可以解决悬停直升机检测的问题。今后的工作将主要集中在以下几个方面:①基于旋翼检测的方法都需要有较强的旋翼幅度,对于远距离目标,其旋翼回波的信噪比(SNR)或信杂比(SCR)非常低,所以选择怎样的积累方式提高信噪比尤为重要;②实际作战中,武装直升机通常会利用地形规划攻击任务低空飞行,在接近或达到攻击距离时垂直跃升到无遮蔽高度,对目标实施攻击。这要求雷达对孤立突发目标的快速反应提出了很高的要求。
[1] MARTIN J,MULGREW B.Analysis of the theoretical return signal form aircraft blades[C].Proceedings of IEEE International Conference on Radar.Washington DC:IEEE Electronics Division,1990:569-572.
[2] 丁建江,张贤达,吕金建.常规雷达飞机回波调制特性的建模[J].系统工程与电子技术,2003,25(11):1407-1410.
[3] 陈永彬,李少东,陈文峰,杨军.直升机旋翼叶片回波建模与特性分析[J].空军雷达学院学报,2015,29(5):4-6.322-327.
[4] 叶玲平, 诸四海, 陈国宏. Radon-Wigner变换在旋翼回波检测中的应用[J]. 现代雷达,2013,35(8):55-58.
[5] 汤子跃, 王永良, 蒋兴舟. 悬停直升机检测问题研究[J].现代雷达,2000(1):15-19.
[6] 蒋相闻, 招启军. 考虑旋翼调制影响的直升机RCS特性分析及评估[J]. 航空动力学报,2014, 29(4):824-834.
(责任编辑:陈福时)
王育东(1991-),男,陕西西安人,西安电子工程研究所硕士研究生,研究方向为雷达目标检测技术。
10.11907/rjdk.162803
TP319
A
1672-7800(2017)003-0121-04
