一种轻小型智能扫雷机器人的设计与实现
2017-04-13朱旭芳马知远
朱旭芳,马知远,潘 丽
(海军工程大学 电子工程学院,湖北 武汉 430033)
一种轻小型智能扫雷机器人的设计与实现
朱旭芳,马知远,潘 丽
(海军工程大学 电子工程学院,湖北 武汉 430033)
针对传统扫雷方式的弊端,结合智能水下机器人的发展趋势,设计了一款具有遥控和自主双模式操作的轻小型扫雷机器人。能通过双视频摄像头对小范围的目标进行精准定位,机械手自动或手动遥控完成排雷,工作期间实时捕捉水下画面,记录机器人的运动轨迹。系统以STC15单片机为核心,由动力系统、图像采集处理系统、控制系统及辅助系统四大部分组成,采用了图像识别、滑模控制及柔性传动等关键技术。系统设计合理,功能完善,相关技术可在水下机器人中推广使用。
扫雷机器人;图像识别;滑模控制;柔性传动
0 引言
目前我国海军在反水雷战和排雷中主要依靠扫雷舰上的声纳进行目标探测与定位[1-3],但是这种方法有明显缺陷,例如难以探测到沉底雷或埋在泥沙中的水雷,扫雷效率不高;扫雷舰自身的磁声电特性随时都有引爆水雷的可能;扫雷舰随时可能受到敌机、岸炮和导弹的袭击,容易造成人员伤亡。如果采用水下机器人进行扫雷则可以有效解决上述诸多问题。
水下机器人是一种综合了人工智能和其它先进计算技术的任务控制器,水下机器人分为遥控潜水器(Remotely Operated Vehicle,简称 ROV)和自治潜水器(Autonomous Underwater Vehicle,简称 AUV)两种。其中ROV动力充足、工作快捷方便、数据采集量大,但由于机身自带线缆,不适合长距离水下作业。AUV不受电缆限制、活动范围大、机动性好、安全智能、隐蔽性好,但远程续航能力不足,人机交互水平和总体决策能力不高,因此各国都在研究如何将ROV和AUV有效结合,最大限度地发挥水下机器人的优势。
目前,美国、日本、俄罗斯等水下技术较发达的国家建造了数百个智能水下机器人,用于海洋开发和军事作战[4-6]。我国智能水下机器人技术的研究起步较晚,主要研究机构包括中国科学院、沈阳自动化研究所和哈尔滨工程大学等,目前已经完成智能水下机器人太平洋深海考察工作,达到了实用水平。综合目前各方面的技术来看,智能水下机器人总的技术水平仍处在研究、试验与开发阶段,仍有大量的关键技术与难点需要突破:①总体布局设计。依据任务和工作需求,结合使用条件,对水下机器人总体结构、流体性能、动力系统、控制与通讯方式进行优化,提高有限空间的利用效率;②采用小型化技术。个体小、机动灵活、隐身性好、布施方便的小型机器人,非常适合进行智能化水下作业;③完善的集成运动控制系统。智能水下机器人的运动控制,需要一个系统来保障运动与定位的精度,此系统需要集成信息融合、故障诊断、容错控制策略等技术;④目标精准识别。由于海洋环境的特殊性和复杂性,目前对水下目标探测与识别的技术大都依靠声纳成像,而基于声纳图像的目标探测与识别可靠性和精确性仍然不高。
为此,针对传统扫雷方式的弊端,结合智能水下机器人的发展趋势,设计了一款具有双模式小型水下机器人。采用视频摄像头完成小范围的精准探测,既能像 AUV一样自动进行目标探测与定位工作,当水下机器人找到目标后,可迅速转换成ROV,操作人员遥控完成精准排雷工作。将这种新型水下机器人大规模的用于反水雷战争,可有效地防止水雷威胁,大大提高反水雷行动的效率。
1 系统结构
系统主要包括动力系统、图像采集处理系统、控制系统及辅助系统4部分,系统框图如图1所示。
系统总体功能实现依靠单片机STC15控制,图像采集系统实时拍摄水底和前方画面,然后从经过处理后的信号中提取目标信息,传递给单片机,单片机控制动力系统和辅助系统,以实现机器人在水中的行进、俯仰和抓取等动作。
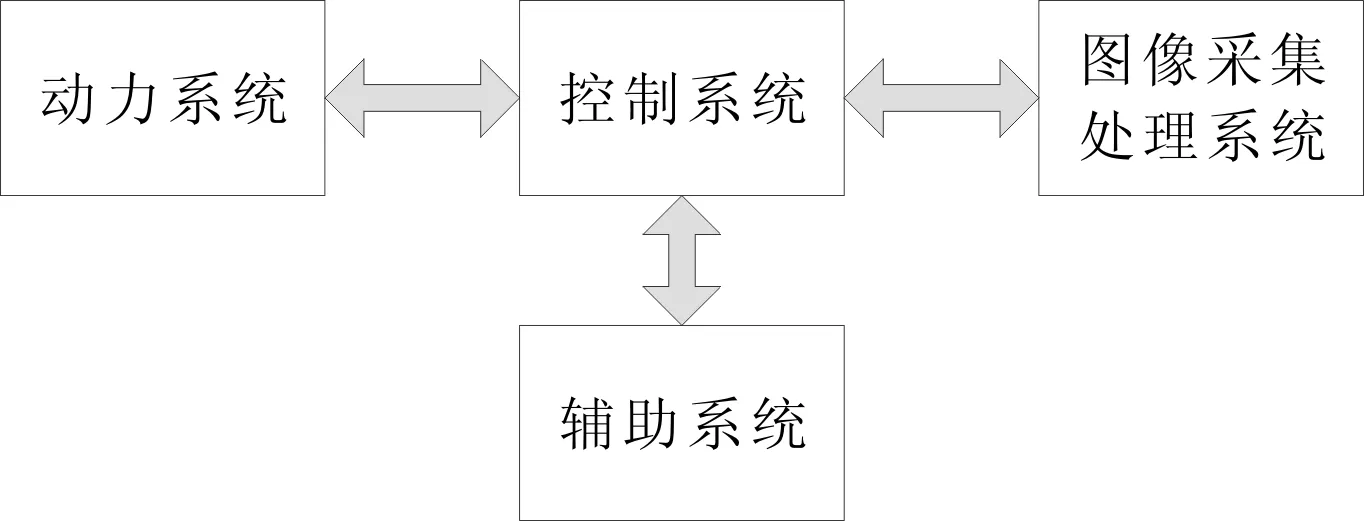
图1 系统结构
通过合理的硬件系统设计[7-9],再辅以相应的算法实现机器人水下作业;在遥控和自主工作模式下,均能通过图像识别技术实现对水下目标物的探寻和抓取;巡检过程中能实时传输水下画面,构建三维水下环境模型,并记录机器人运动轨迹。
2 系统硬件设计
2.1 动力系统
动力系统包括重力调节系统和动力推进系统[3-4]。浮力调节系统中利用重力块的滑动对姿态纵倾角进化调节,从而使机器人能够在水下垂面任意角度保持稳定。结合正反螺旋桨推进技术实现机器人的快速沉浮,扩大机械手的作业空间。同时,在算法中采用滑模控制方法,使机器人在水下姿态保持稳定。加入干扰器对各种干扰项进行估计,大大消弱了抖振。动力推进系统包括电机、螺旋桨、柔性传动装置等。电源对电机供电,电机通过柔性传动装置,克服轴系对中问题,带动螺旋桨转动,进而为机器人的各种活动提供动力。
本设计中纵倾角的调节靠移动体积、重量较大的重力块来实现,位于水密舱中部,后期可以将重力块换成蓄电池,既节省空间,又能增强续航能力。
2.2 图像采集处理系统
图像采集处理系统[10]控制包括工控机EBOX-2350MX、图像采集卡、摄像头、LED光源等装置。用于对采集的图像信息进行处理,存储六轴加速度传感器的数据,记录运行轨迹等。
本系统采用双摄像机镜头。摄像机采用深圳翔飞科技有限公司型号为SF-203G的彩色CCD模拟摄像机,其CCD类型为1/3英寸SONY CDD,420线512×582 pixels;镜头采用f1.4,焦距为6 mm~15 m的CCD普通镜头,光圈大小也可以调节。
图像采集卡采用的是陕西维视的双路输入、可进行实时图像采集的MV-8002 PCI图像采集卡。该图像采集卡能进行10位A/D转换,支持C++及OPENCV的开发。系统设计软件基于Windows7的VisualC++ 2008及IntelOPENCV开源视觉库,摄像机内外参标定、图像处理、图像特征提取、标定、定位算法等都是由PC机来完成。
2.3 控制系统
控制系统主要包括控制器、六轴加速度传感器、电机驱动器、遥杆等几个部分。控制器为单片机STC51,用于控制电机驱动,改变螺旋桨的转速及方向、直线电机的转停、水泵的转停以及机械手的抓取。六轴传感器用来实时测量机器人六个自由度的加速度,由单片机实时控制机器人的平衡。
本系统中的螺旋桨采用转动式柔性传动。将推进装置输出轴布置在狭小和不规则的空间内,使得整体结构更加趋于合理。并可以适当弯曲,防止振动,避免损坏连接部件。如果不采用柔性传动,电机置于机器人外部,必须作水密处理,加大了制作与设计难度,而且降低了可靠性。通过运用柔性传动,推进电机可以放在机器人内部,避免了水密,增强了整个系统的可靠性,降低了系统的复杂性。
2.4 辅助系统
辅助系统主要包括机械手、耐压高透外壳、水泵、循环冷却铜管。机器人在水下工作,因此必须加装水密性好、耐压强的外壳。锁定目标后,操纵人员利用机械手完成水下作业。在作业过程中,各元件会发热导致系统非正常工作。水泵与循环冷却铜管共同用于对各发热元件降温,增强机器人的工作可靠性。
利用SolidWorks对此型水下机器人进行结构设计,并确定其每一个部分的具体尺寸与装配方法,主要包括外壳、配重块、计算机、电机、轴封、电池、螺旋桨、机械手、摄像头等重要部件。其模型图如图2所示。
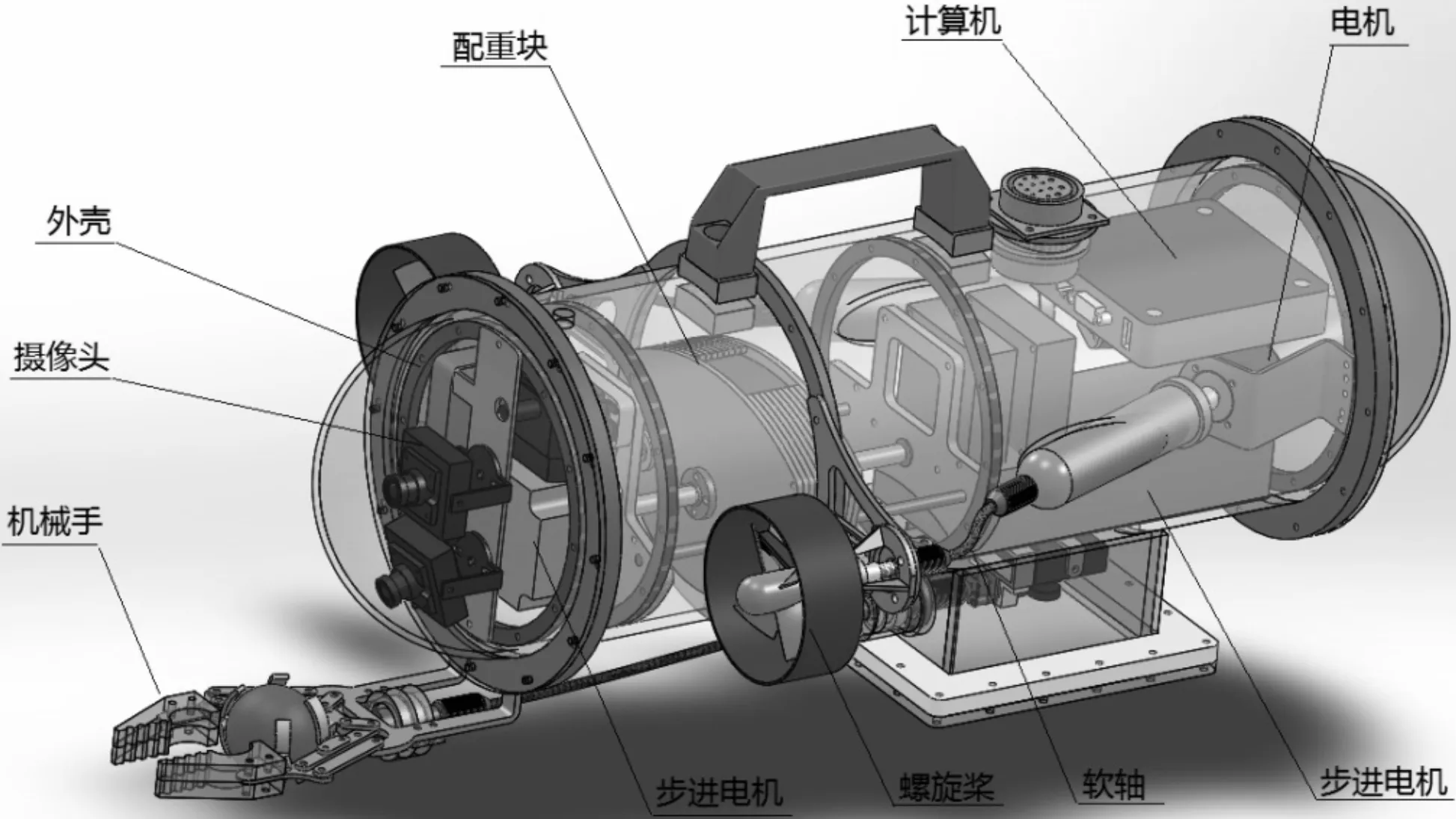
图2 水下机器人模型
各部分部件分别用相应工艺进行加工。经过浮力与重力计算,运用铸造方法加工出配重块。在机械手和各种连接件的加工过程中,利用数控铣床、数控车床、数控加工中心等加工方式。防水方面利用硅胶圈,配合硅胶等方式实现机器人高压耐水。
3 系统软件设计
3.1 控制流程
STC51单片机通过驱动器控制直线电机、左右螺旋桨电机、机械手电机和冷却水泵的转向及转速。同时,单片机还要控制一个六轴加速度传感器[11-13],检测水下机器人沿XYZ三个方向的加速度和绕XYZ三轴的角加速度,通过DSP得到水下机器人姿态和运动参数,用于和遥控器的对应操作和机器人水下运行轨迹测绘。
此外,单片机还控制两个通信模块,无线通信24L01与CAN总线,无线通信模块用于模式的选择和机器的开关,CAN总线用于遥模式下传输遥控器的控制指令。

图3 系统控制
3.2 图像识别
针对水下图像亮度不均匀、对比度低、噪声明显等特点,对摄像机直接获取的图像信息进行预处理。
水下图像的噪声[14-15]主要有两种:一种是随机分布的椒盐噪声;一种是平稳分布的高斯噪声。如果是椒盐噪声,选择中值滤波方法;如果是高斯噪声,选择BayesShink小波阈值方法,设定合适的阈值,将小于阈值的系数置零,大于的则保留。然后通过阈值函数映射到估计系数,最后对估计系数进行逆变换,就可以实现去噪和重建。去噪前后图像如图4所示。
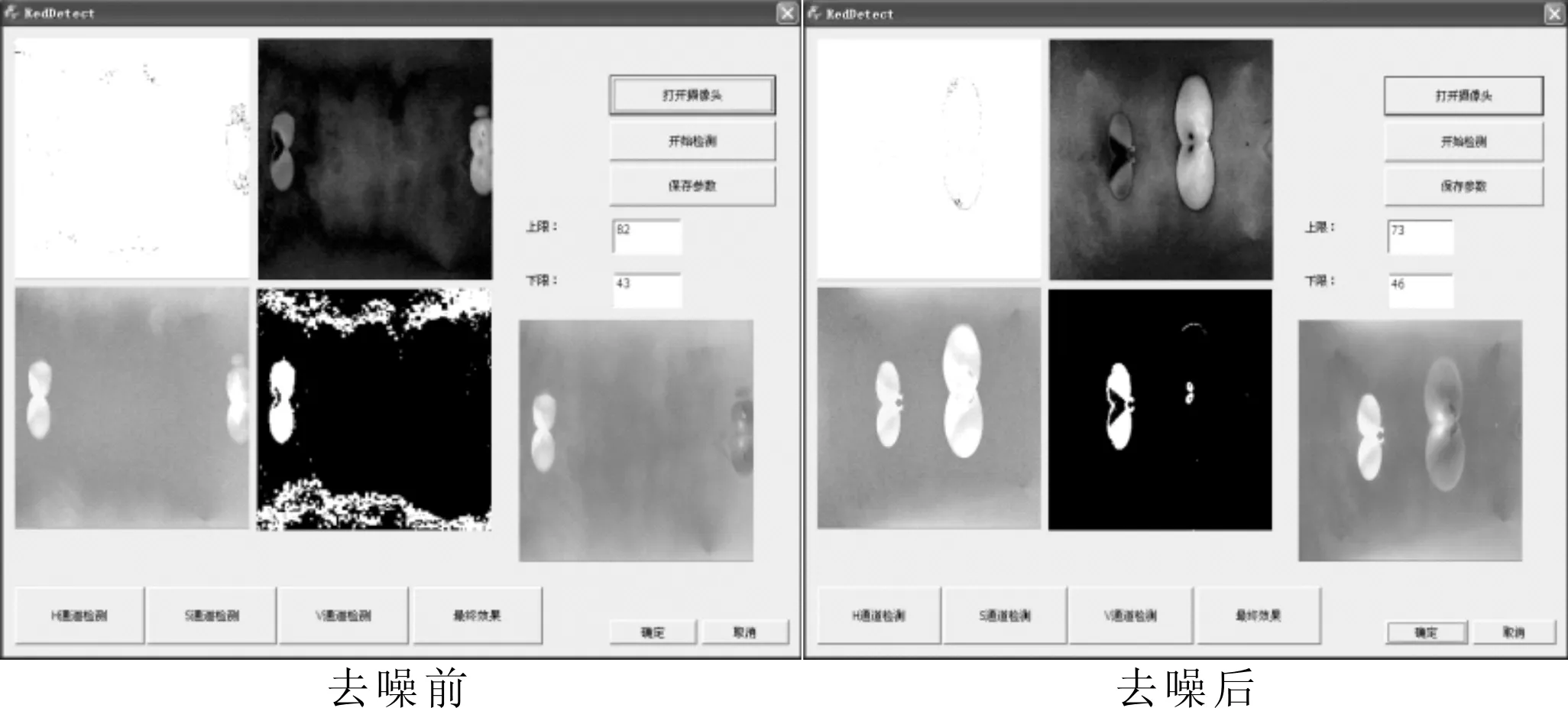
图4 去噪前后图像
经过降噪后的图像信息可用于图像识别,本型机器人的图像识别主要是基于OpenCV技术。利用经过预处理的图像资料,提取出图像中HSV的分量并识别和判断,通过构建目标物的最小外接矩形,判断目标的位置和方向,并向下位机放松控制指令进行跟踪或对目标进行操作。图像识别流程如图5所示。
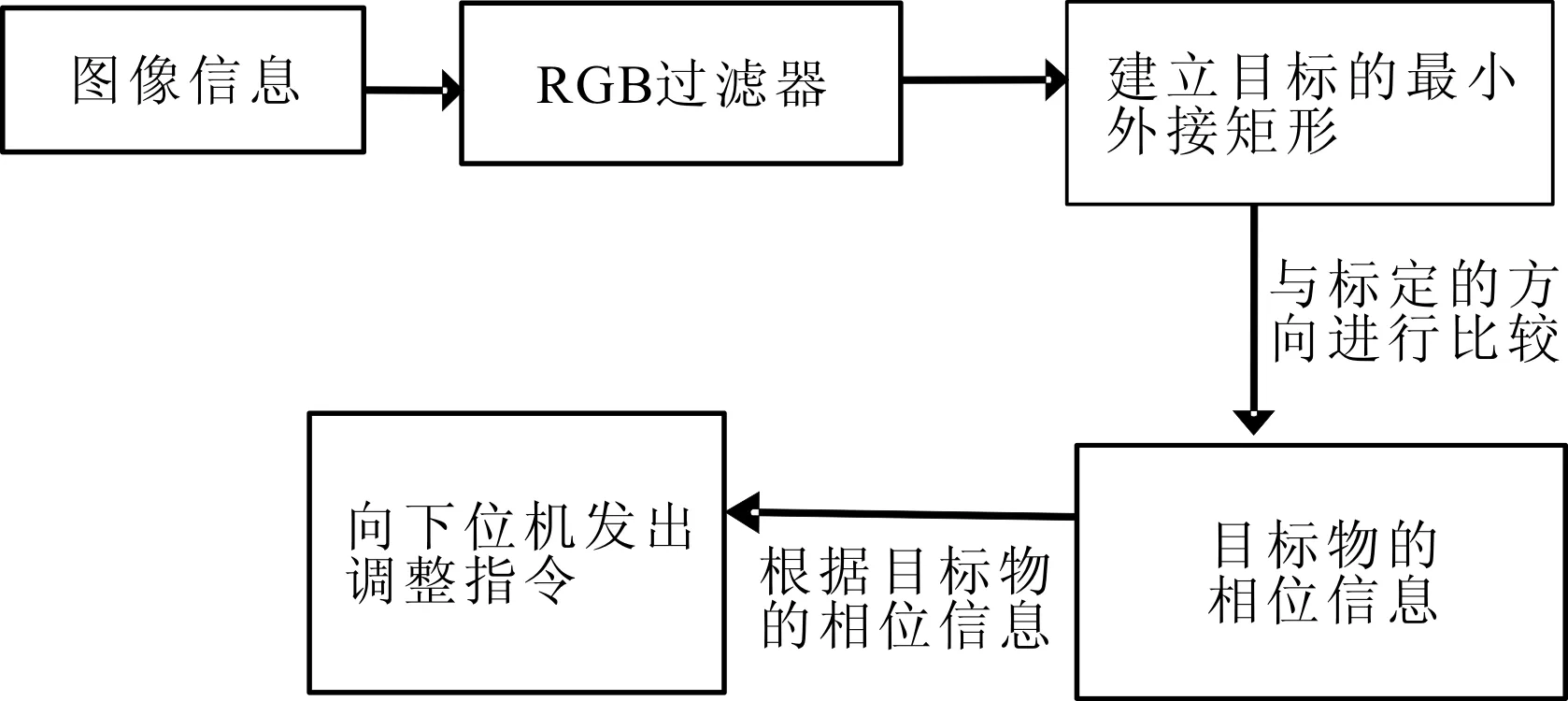
图5 图像识别流程
4 系统功能实现
本设计的水下机器人满足水下作业要求,在遥控和自主工作模式下,能通过图像识别技术实现对水下目标物的探寻和抓取,巡检过程中能实时的传输水下画面,构建三维水下环境模型,并记录机器人的运动轨迹。
4.1 遥控模式
遥控模式下可以用遥控手柄控制水下巡检机器人的姿态和机械手臂的动作,更加灵活可控。
遥控器上的倾角传感器和飞行摇杆接收操作者的控制信息,经单片机处理后,由CAN总线发送至巡检机器人的单片机,控制机器人前进、后退、左右旋转、俯仰、机械手张合及辅助设备的工作,实现与遥控的对用操作。
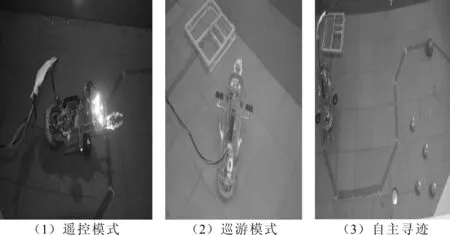
图6 机器人工作组
4.2 自主模式
(1)自主巡检。 自主巡检模式下,根据前方摄像头拍摄的视频信息,通过与设定的目标物对比,确定行进的角度和方向,主控机发出控制指令,控制左右螺旋桨的驱动和直线电机的驱动,使巡检机器人左右或上下调整。直至找到目标,切换遥控模式,控制机械手动作,实现对目标物的抓取。
(2)自主寻迹。 自主寻迹模式下,将位于机器人底部的摄像头采集的图像信息上传至计算机,计算机根据RGB过滤除目标以外的图像,并建立图像的最小外接矩形。通过与标定的方向进行对比,测得目标信息的方位信息。根据目标的相位信息,主控机发出控制指令,控制左右螺旋桨的驱动和直线电机的驱动,使巡检机器人左右或上下调整,直到目标相位信息与标定方向一致。路线结束后,机器人对断点进行标注,并自动上浮。
5 结语
本文设计的水下扫雷机器人能通过图像识别技术实现水下精准作业,为适应机器人结构优化,在后续设计中需对机器人进行改进与提高。例如将电池集成在重力块中,既可以使机器人内部空间更大,降低装配与组装难度,同时更有利于机器人功能扩展。利用Kinect 技术可以使水下巡检机器人控制更加智能化。Kinect不需要使用任何控制器,它依靠相机捕捉三维空间中操作者的运动,并通过捕获的信息图像对机器人发出相应的指令。机器人摄像头拍摄的视频图像可以通过Cave技术构建出海洋地下的浸入式虚拟现实空间,使操控着身临其境,大大增强机器人的交互性能。
[1] 倪华,佘湖清.国外潜布水雷的现状与发展趋势.水雷战与舰船防护[J].2013,5:1-8.
[2] SGARZIF.Advaneed mine capability ASTERIA:rheItalian style[C].Mine wafae SymPOsium,2012.
[3] 方晨晨.基于UWB的自主跟随机器人定位方法[J].软件导刊,2016,15(9):127-128.
[4] 徐玉如,李彭超.水下机器人发展趋势[J].自然杂志,2013(33)3:125-131.
[5] 苏纪兰.海洋科学和海洋工程技术[M].济南:山东教育出版社,1998.
[6] FIELD JG,HEMPELG,SUMMERHAYESC P.2020年的海洋-科学、发展趋势和可持续发展面临的挑战[M].关克勤,林宝法,祁冬梅,译.北京:海洋出版社,2004.
[7] 金碧霞.一种微小型水下机器人本体结构的设计[J].机械工程师2013(11):47-49.
[8] 李哗,常文田,孙玉山,苏玉民.自治水下机器人的研发现状与展望[J].机器人技术与应用,2007(1):25-31
[9] 宋思利,刘甜甜,康凯灿,陈言俊.自主水下机器人机械结构设计与实现[J].机器人技术与应用,2012,7(30):29-31.
[10] 朱旭光.Auv的改进滑模变结构控制拉术研究[D].哈尔滨:哈尔滨工程大学,2008.
[11] 肖涛.基于Backstepping方法的水下机器人自适应滑模控制技术研究[D].哈尔滨:哈尔滨工程夫学,2009.
[12] 田宇.水下机器人智能运动控制技术研究[D].哈尔滨:哈尔滨工程大学,2007.
[13] PANG YONGJIE,SUNYUSHAN,GAN YONG,et al.An integrated GPS/DR navigation system for AUV[J].Journal of Marine Science and Application,2006,5(4):8-13.
[14] YUSHAN SUN,XIAO LIANG,LEI WAN,et al.Design of the embedded navigation system of autonomous underwater vehicle based on the VxWorks[C].The Sixth IEEE International Conference on Control and Automation.Guangzhou,China,2007.
[15] 杨 勇.智能水下机器人故障诊断与容错控制研究[D].哈尔滨:哈尔滨工程大学,2009.
(责任编辑:陈福时)
朱旭芳(1978-),女,湖北天门人,博士,海军工程大学电子工程学院讲师,研究方向为军用目标特性;马知远(1982-),男,湖北武汉人,海军工程大学电子工程学院副教授,研究方向为电路与系统;潘丽(1985-),女,湖北武汉人,海军工程大学电子工程学院讲师,研究方向为电路与系统。
10.11907/rjdk.162776
TP319
A
1672-7800(2017)003-0062-03
