高精度数字式MEMS陀螺仪驱动闭环控制系统设计
2017-04-12童紫平张欢阳贺克军张紫乾龙善丽
童紫平,张欢阳,乔 伟,贺克军,张紫乾,龙善丽
(华东光电集成器件研究所,苏州 215163)
高精度数字式MEMS陀螺仪驱动闭环控制系统设计
童紫平*,张欢阳,乔 伟,贺克军,张紫乾,龙善丽
(华东光电集成器件研究所,苏州 215163)
为提高微机械陀螺检测灵敏度,设计了一种数字式微机械陀螺驱动闭环控制系统,该系统利用数字锁相环来实现陀螺驱动谐振频率和相位的跟踪,同时利用数字自动增益控制模块实现驱动幅值的稳定控制。该控制系统先是在MATLAB/Simulink平台上进行仿真验证,之后在基于FPGA的验证平台上进行验证。实验结果表明在该数字系统的控制下陀螺驱动起振时间大约为0.6 s,驱动幅值相对稳定性小于10×106,陀螺零偏稳定性达到10.448 °/hr。
微机械陀螺;数字闭环驱动;FPGA;锁相环;自动增益;MATLAB/Simulink
随着微机械加工工艺的发展,MEMS硅微机械陀螺仪在工业自动化、惯性导航和汽车电子等领域得到了广泛的应用[1-2]。相比于光纤陀螺、激光陀螺,MEMS硅微机械陀螺仪具有体积小、可靠性高、成本低、可批量生产等优点[3-4]。但是目前MEMS硅微机械陀螺的精度仍然处于较低的水平,如何提高MEMS陀螺仪的精度是MEMS传感器研究领域的主要方向。
MEMS陀螺仪是基于科氏力原理工作的,根据科氏力公式可知驱动振荡速率直接影响陀螺的刻度因子和稳定性。因此保持陀螺驱动模态的稳定是提高陀螺精度的关键所在[5-6]。文献[4]采用周期平均法对陀螺闭环自激驱动进行了理论分析和数值仿真,但未设计电路验证。文献[5]介绍了一种基于AGC的陀螺闭环驱动接口电路,但该电路使用模拟电路实现。文献[7]在PCB板上设计实现了陀螺双闭环测控电路。无论是采用PCB板电路还是采用模拟电路都容易受封装、外界环境和寄生效应的干扰,进而影响陀螺的测量精度[8]。为了克服这些缺点,提高陀螺测量精度,本文提出了一种数字式闭环驱动控制方案。本文利用MATLAB/Simulink软件进行陀螺驱动数字算法的设计以及驱动闭环系统的仿真验证[9-10]。最后利用FPGA硬件验证平台实验验证了整个闭环系统。
1 MEMS陀螺驱动系统介绍
图1是陀螺驱动闭环控制原理图,正常工作时陀螺驱动质量块被激励到谐振频率上并维持恒定的振动。为实现这一功能,系统在数字域设计了锁相环(PLL)、自动增益控制(AGC)和二阶带通ΣΔ-DAC。C/V电路用于检测陀螺振动引起的电容变化量,为了方便在数字域中处理信号电路中采用了一个高精度模数转换器(ADC)。

图1 陀螺驱动闭环控制原理图

图2 角振动陀螺结构及动力学模型示意图
2 MEMS陀螺结构特性分析
图2所示是角振动式微机械陀螺结构及等效动力学模型示意图。与线振动式陀螺一样,当不考虑正交误差时,角振动式陀螺的动力学模型也可用一个二阶微分方程表示为:

(1)
式中:θd为陀螺驱动模态振动角度,Jd为角振动式陀螺驱动质量块关于Z轴的等效转动惯量,cd为陀螺驱动模态等效阻尼系数,kd为陀螺驱动模态等效刚度,Mtotal-d为陀螺由外加静电驱动力产生的总扭矩。
我们假设外加驱动力产生的总扭矩等于Mtotal-d0×sin(ωd-in·t),那么求解微分方程(1)可得:
θd(t)=θd0sin(ωd-in·t+φd0)
(2)
式中:转动角度幅值和相位可分别表示为:
(3)
(4)
(5)
(6)
式中:ωd是陀螺驱动模态谐振频率,Qd是陀螺驱动模态品质因子。
从以上分析可知,当外加驱动扭矩的频率ωd-in等于陀螺驱动固有谐振频率ωd时,陀螺结构能够获得最大的振幅,此时相位φd0=-90°。因此为了使陀螺工作稳定且有效,外加驱动电压的频率就必须跟踪陀螺驱动模态固有谐振频率。
3 数字锁相环
在MEMS陀螺驱动系统中驱动电压信号和驱动检测信号通常是正交的,因此在一个陀螺自激驱动闭环系统中不仅需要持续跟踪陀螺振动信号的频率,还需要对它的相位进行跟踪和迁移。在本电路中我们设计了一种适用于FPGA验证的数字锁相环(也称软件锁相环SPLL)来实现这一功能。图3所示是软件锁相环SPLL的Simulink仿真图。它是一个闭环控制网络,主要由鉴相器(PD)、环路滤波器(lf)以及数控振荡器(NCO)组成。鉴相器(PD)检测输入参考信号和NCO的输出信号之间的相位差;环路滤波器是一个低通滤波器,用于滤除鉴相器输出信号中的高频无用成分;数控振荡器NCO根据输入信号产生一定频率的正弦波和余弦波。
鉴相器的种类有很多种,本设计中采用了乘法鉴相器,当环路稳定时它可以近似于线性系统。假设输入参考信号u1=U1sin(ω1t+θ1),NCO的输出信号u2=U2cos(ω2t+θ2),那么鉴相器输出信号等于:
upd(t)=u1(t)·u2(t)=U1U2sin(ω1t+θ1)×
cos(ω2t+θ2)=[(U1U2)/2](sin[(ω1+ω2)t+
θ1+θ2]+sin[(ω1-ω2)t+θ1-θ2]}
(7)
式中:第1项为高频分量,会被环路滤波器滤除;第2项为有用的低频分量。当锁相环锁定时ω1=ω2,令Kd=(U1U2)/2,忽略高频分量,鉴相器的输出近似有:
upd(t)≈Kdsin(θe)
(8)
式中:θe=θ1-θ2为相位误差信号。如果相位误差较小,正弦函数可以用其自变量替换得到:
upd(t)≈Kdθe
(9)
式(9)表示了乘法鉴相器的近似线性模型。

图3 软件锁相环SPLL的Simulink仿真图
在软件锁相环(SPLL)的数控振荡器(NCO)设计中通常可采用DDS或者CORDIC算法实现。由于CORDIC算法简单而且非常适合FPGA实现,本系统采用了CORDIC算法来实现NCO的功能。下面简单介绍下CORDIC算法的工作原理。

图4 圆坐标系旋转示意图
图4是质点在圆坐标系中旋转示意图,在xy坐标平面内将点(x1,y1)旋转θ角度到点(x2,y2)。其关系用下式表示:
x2=x1cosθ-y1sinθ
y2=x1sinθ+y1cosθ
(10)
通过提出因数cosθ,式(10)可写成如下形式:
x2=cosθ(x1-y1tanθ)
y2=cosθ(y1+x1tanθ)
(11)
如果去掉cosθ项,我们得到伪旋转方程:
(12)
即旋转角度是正确的,但是模值变大了arccosθ倍,虽然我们并不能通过适当的数学方法去除cosθ项,但是我们发现去除cosθ项后能够简化坐标平面旋转的计算操作。
事先选取合适的角度θ,使得tanθi=2-i,这样在n次迭代中方程(12)可以写出更一般的形式
xi+1=xi-di(2-iyi)
yi+1=yi+di(2-ixi)
(13)
这里我们引入第3个方程,称为角度累加器,用来在每次迭代过程中追踪累加的旋转角度:
zi+1=zi-di·arctan(2-i)
(14)

上式伪旋转方程分析我们忽略掉了cosθ项,这样n次迭代后xn、yn被伸缩了Kn倍。其中
(15)
事实上如果迭代次数可知,则我们可以预先计算伸缩因子Kn。
因此,在旋转模式中经过n次迭代后我们得到
(16)
在式(16)中通过设置x0=1/Kn,y0=0就可以根据n次迭代的结果计算出cosz0和sinz0的数值。
4 自动增益控制
为了保证微机械陀螺的刻度因子和零位的稳定性,必须确保驱动幅值和频率的稳定性。本设计中采用双闭环控制网络来分别实现MEMS微机械陀螺驱动幅值和频率的稳定性控制。前面我们已经讨论了利用锁相环进行相位闭环控制;在幅度闭环控制中我们采用自动增益控制(AGC)来实现。
陀螺驱动闭环自动增益控制原理图如图5所示。陀螺振荡引起的角度变化被检测电路检测并进行放大;经过ADC转换后在数字域提取得到其正弦波幅值amp,并与基准参考值Ref进行比较得到残差幅值信号e;最后幅值残差信号经过PI控制器放大后与PLL输出进行混频形成反馈驱动信号。当陀螺振动引起的电压变化幅值大于参考值Ref时,残差信号变成负值,PI控制器输出减小即驱动信号减小,结果陀螺振动角度位移减小;反之亦然。通过这种反馈控制,最终陀螺振动角度位移将稳定在参考值Ref等效的位移附近。

图5 AGC自动增益控制原理图
在闭环控制系统中最重要的是系统稳定性,本系统中采用了经典控制理论中的PI(比例积分)控制器来调节系统稳定性[11-12]。其离散域的传输函数可表示为:
(17)
式中:Kp和Ki分别表示比例和积分常数,它们由陀螺结构参数和电路增益决定。
5 实验和仿真结果
为了验证陀螺驱动闭环控制系统的正确性,基于FPGA开发平台设计了一款陀螺闭环测控电路FPGA验证平台。该平台主要包括MEMS传感器,前端C/V检测电路,一款高精度ADC以及FPGA板(V6)。在FPGA中我们设计了用于陀螺闭环频率控制的PLL环路、用于陀螺闭环幅度控制的AGC环路以及用于驱动激励信号输出的高精度ΣΔ-DAC。
图6所示是陀螺驱动闭环系统驱动检测电压的Simulink仿真波形图,图7所示是陀螺驱动闭环系统驱动检测电压的测试结果图。对比两个波形图可知,陀螺驱动闭环测试结果与仿真结果基本吻合,陀螺上电启动时间大约为0.6s。图8所示是陀螺驱动检测电压幅值采集结果,数据来源于FPGA中的幅值检测模块输出,并乘以ADC的基准电压(大约3V)得到图中电压数据。分析图中数据可知,陀螺驱动检测电压幅值稳定在0.992 7V,幅值信号变化的标准方差为8.156×10-6V,驱动幅值相对变化率小于10×106。图9所示是在190Hz采样率下陀螺零偏输出,由图9可知陀螺零偏稳定性达到10.448 °/hr。

图6 陀螺驱动检测电压仿真波形图
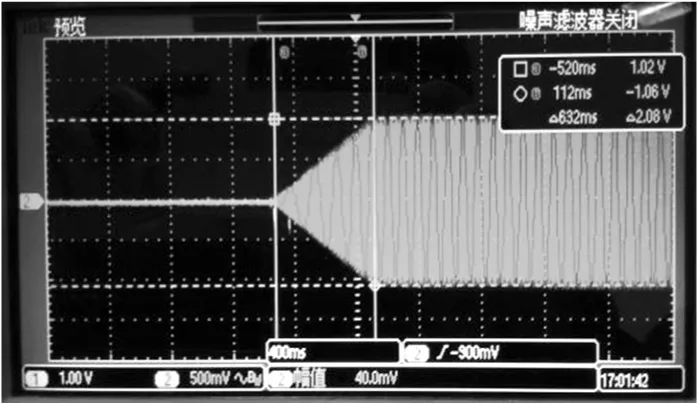
图7 陀螺驱动检测电压测试波形图
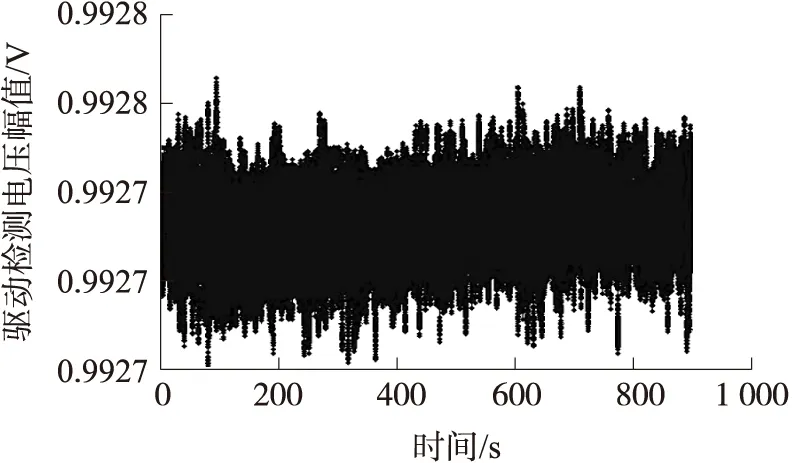
图8 陀螺驱动检测电压幅值

图9 陀螺零偏输出
6 结论
为了保证陀螺结构驱动模态的稳定工作,本文利用MATLAB/Simulink软件设计了一种数字式的陀螺驱动闭环控制系统。该闭环控制系统利用数字锁相环PLL来实现频率和相位的自动跟踪控制,同时利用自动增益控制AGC来实现幅度的自动调整控制。最后在基于FPGA的验证平台上验证了该数字驱动闭环控制系统的有效性。实验结果表明在该数字系统的控制下陀螺驱动起振时间大约为0.6 s,驱动幅值稳定性小于10×106,陀螺零偏稳定性达到10.448 °/hr。
[1] Liu Dachuan,Lu N N,Cui J,et al. Digital Closed-Loop Control Based on Adaptive Filter for Drive Mode of a MEMS Gyroscope[J]. IEEE Sensors,2010,143(2):1722-1726.
[2] Wang Xiaolei,Li Hongsheng,Yang Bo. Design and Implementation of Digital Closed-Loop Drive Control System of a MEMS Gyroscope[J]. Journal of Southeast University,2012,28(1):35-40.
[3] 谭晓昀,雷龙刚,王冠石.电容式微机械陀螺双环路闭环驱动电路研究[J]. 传感技术学报,2010,23(10):1449-1453.
[4] 王展飞,鲁文高,李峰,等. MEMS振动陀螺闭环自激驱动的理论分析及数值仿真[J]. 传感技术学报,2008,21(8):1337-1342.
[5] Fang Ran,Lu Wengao,Wang Guannan,et al. A Low-Noise High-Linearity Interface ASIC for MEMS Gyroscopes[J]. Journal of Semiconductors,2013,34(12):1-6.
[6] Dennis Kim,Robert M’Closkey. Noise Analysis of Closed-Loop Vibratory Rate Gyros[J]. American Control Conference,2012,50(6):92-97.
[7] Chen Fang,Yuan Weizheng,Chang Honglong,et al. Design and Implementation of an Optimized Double Closed-Loop Control System for MEMS Vibratory Gyroscope[J]. IEEE Sensors Journal,2014,14(1):184-196.
[8] Ismail A,George B,Elmallah A,et al. A High Performance Mems Based Digital-Output Gyroscope[J]. IEEE Transducers,2013,16(20):2523-2526.
[9] 孙茜,刘建业,李荣冰. 基于混合控制的闭环MEMS陀螺建模与仿真[J]. 传感器与微系统,2009,28(1):36-39.
[10] 薛定宇,陈阳泉. 基于MATLAB/Simulink的系统仿真技术与应用[M]. 北京:清华大学出版社,2002:350-366.
[11] 卢海曦,王寿荣,周百令.微机械陀螺仪反馈控制器鲁棒性分析及闭环接口检测电路设计[J]. 东南大学学报,2011,41(3):526-532.
[12] 李海涛,苏中. 钟形振子式角速率陀螺驱动控制技术研究[J]. 传感技术学报,2015,28(1):28-33.
童紫平(1985-),男,硕士,现为华东光电集成器件研究所工程师,主要研究方向为数模混合集成电路设计,苏州市高新区科技城龙山路89号中国兵器,215163,tzp117350@163.com。
Design of High Precision Digital Closed-Loop Drive Control System of MEMS Gyroscope
TONGZiping*,ZHANGHuanyang,QIAOWei,HEKejun,ZHANGZiqian,LONGShanli
(East China Institude of Photo-Electron IC,Suzhou 215163,China)
A digital closed-loop drive control system is designed for improving the detection sensitivity of MEMS Gyroscope. The system adopts a digital phase-locked loop(PLL)to track the resonant frequency and phase of the gyroscope. And a digital automatic gain control(AGC)method is utilized to control the amplitude constant. All algorithms are simulated by MATLAB/Simulink and tested on a high performance core Field Programmable Gate Array(FPGA)chip. The experiment results indicate that the startup time of the gyroscope is about 0.6 s,the drive amplitude stability is less than 10×106and the velocity bias stability is 10.448 °/hr.
MEMS Gyroscope;Digital closed-loop drive;FPGA;PLL;AGC;MATLAB/Simulink
2016-08-22 修改日期:2016-11-10
TN453
A
1004-1699(2017)03-0397-05
C:1265;7230M
10.3969/j.issn.1004-1699.2017.03.011